
Wheelchair-user Detection Combined with Parts-based Tracking
Ukyo Tanikawa
1
, Yasutomo Kawanishi
1
, Daisuke Deguchi
2
, Ichiro Ide
1
,
Hiroshi Murase
1
and Ryo Kawai
3
1
Graduate School of Information Science, Nagoya University, Furo-cho, Chikusa-ku, Nagoya-shi, Aichi, Japan
2
Information Strategy Office, Nagoya University, Furo-cho, Chikusa-ku, Nagoya-shi, Aichi, Japan
3
NEC Corporation, 1753 Shimo Numabe, Nakahara-ku, Kawasaki-shi, Kanagawa, Japan
Keywords:
Object Detection, Wheelchair User, Crowded Scene, Parts-based Tracking.
Abstract:
In recent years, there has been an increasing demand for automatic wheelchair-user detection from a surveil-
lance video to support wheelchair users. However, it is difficult to detect themdue to occlusions by surrounding
pedestrians in a crowded scene. In this paper, we propose a detection method of wheelchair users robust to
such occlusions. Concretely, in case the detector cannot a detect wheelchair user, the proposed method esti-
mates his/her location by parts-based tracking based on parts relationship through time. This makes it possible
to detect occluded wheelchair users even though he/she is heavily occluded. As a result of an experiment,
the detection of wheelchair users with the proposed method achieved the highest accuracy in crowded scenes,
compared with comparative methods.
1 INTRODUCTION
In recent years, various efforts are being made to re-
alize a symbiotic society where people with disabili-
ties can enjoy their lives actively. For example, many
public facilities have become handicapped-accessible
to support wheelchair users. However, there are still
many scenes where they need help from others. In
such cases, to provide appropriate support as needed,
there has been an increasing demand for a system to
detect wheelchair users automatically from surveil-
lance video.
However, in an actual environment such as
railway stations, many pedestrians often surround
wheelchair users. Figure 1 shows an example of a
wheelchair user moving in a crowded scene. In a
crowded scene like this, there is a problem that detec-
tion often fails since the whole body of a wheelchair
user is not visible because of occlusions caused by
surrounding pedestrians. In this paper, we aim to de-
tect occluded wheelchair users in a crowded scene,
and propose a detection method robust to occlusions.
A detector often suffers when the target is heavily
occluded. Tracking based on their past positions en-
ables us to locate occluded targets even when the de-
tector cannot detect them. However, when the track-
ing target is occluded, the tracking accuracy declines.
Figure 1: Example of a wheelchair user moving in a
crowded scene. Occlusions by surrounding pedestrians are
often observed.
We have observed that some parts of a wheelchair
user are visible even if his/her body is almost oc-
cluded, because the width and the depth of wheelchair
users are larger than those of pedestrians in general. If
the parts are visible, we can roughly estimate his/her
bounding box. In this paper,based on the observation,
we propose a method which combines detection by a
detector with parts-based tracking. When a traditional
detector could not detect a target due to occlusions,
the proposed method can estimate its location based
on parts-tracking results.
Since the size of the parts is small in general,
it is difficult to distinguish them from other objects.
Hence, a parts tracker which only considers their ap-
pearance can drift easily. To reduce the drift, we in-
Tanikawa U., Kawanishi Y., Deguchi D., Ide I., Murase H. and Kawai R.
Wheelchair-user Detection Combined with Parts-based Tracking.
DOI: 10.5220/0006101101650172
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 165-172
ISBN: 978-989-758-226-4
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
165

troduce part tracking confidence and parts relation-
ship through time; The proposed method calculates
the tracking confidence of each part of a target. The
parts with high confidence are tracked based on their
appearances. The positions of the parts with low con-
fidence are predicted based on their past trajectories
and inter-parts positional relationships.
In summary, our contributions include the pro-
posal of:
• A framework of wheelchair-user detection robust
to occlusions by combining a detector with parts-
based tracking.
• A parts-based tracking method which considers
trajectories and inter-parts positional relationships
to predict positions of parts with low confidence.
The rest of the paper refers to related works in
Section 2, describes the proposed framework in Sec-
tion 3 and the proposed parts-based tracking method
in Section 4, reports evaluation results in Section 5,
and concludes the paper in Section 6.
2 RELATED WORKS
Dalal and Triggs proposed an object detection method
using Histogram of Oriented Gradients (HOG) fea-
tures (Dalal and Triggs, 2005). HOG is a feature
descriptor robust to local shape deformations, illu-
mination variations, and effects of shades. However,
HOG cannot handle large pose deformations. In con-
trast, Felzenszwalb et al. proposed an object detection
method using Deformable Part Model (DPM), which
represents an object model with a set of parts (Felzen-
szwalb et al., 2010). DPM is robust to pose deforma-
tions by considering fine shape and position of each
part. The position is treated as latent variables and
automatically learned by using Latent SVM (Felzen-
szwalb et al., 2010). However, DPM has a problem
that its detection accuracy degrades when the parts are
occluded.
Myles et al. proposed a detection method special-
ized for wheelchair users based on the detection of
wheels and faces of their users (Myles et al., 2002).
In this method, wheels of wheelchairs are detected by
using the Hough transform, and faces of their users
are detected based on their color features. Then,
their 3-D poses are constructed by 2-D ellipse pro-
jection. However, this method needs accurate calibra-
tion in advance. Huang et al. proposed a method of
wheelchair-user detection from a single camera with
no calibration (Huang et al., 2010). This method
uses HOG and Contrast Context Histogram features
(Huang et al., 2006), and a hierarchical cascade clas-
sifier using AdaBoost is built. However, this method
does not consider occlusions of wheelchair users, so
in a crowded scene, it cannot detect them accurately.
Henriques et al. proposed a method for single
object tracking using Kernelized Correlation Filter
(KCF) tracker (Henriques et al., 2015). KCF tracker
achieves good performance with high speed. It is a
method based on kernel ridge regression, and is a kind
of correlation-filter-based tracking methods (Bolme
et al., 2009; Bolme et al., 2010). Correlation-filter-
based trackers can calculate tracking confidence us-
ing the Peak-to-Sidelobe Ratio (PSR), which quan-
tifies the strength of correlation peak relative to an
area around the peak in a response map (Bolme et al.,
2010).
Zhang et al. proposed a method for multi-person
tracking combining person detection by a detector
with visual object tracking (Zhang et al., 2012).
This method represents target appearance with a set
of templates gathered from detections, and tracking
is performed by alternating mean-shift tracking and
Kalman filtering. This enables an estimation of their
location even if the detector cannot detect them. How-
ever, this method does not take into account occlu-
sions of tracking targets, so in a crowded scene, it
cannot track them accurately.
There are tracking methods which explicitly con-
sider the target’s partial occlusions. Pan and Hu pro-
posed a tracking method which handles occlusions by
exploiting spatio-temporal context information (Pan
and Hu, 2007). However, this method does not con-
sider heavy occlusions.
In summary, these conventional methods cannot
handle heavy occlusions of wheelchair users well.
3 FRAMEWORK OF
WHEELCHAIR USERS
DETECTION COMBINED WITH
PARTS-BASED TRACKING
As mentioned above, detection of wheelchair users
in a crowded scene is challenging due to heavy oc-
clusions. These occlusions are often caused by sur-
rounding pedestrians. Since it is difficult to detect oc-
cluded targets from only a single frame, we introduce
a framework with parts-based tracking across multi-
ple frames, which is introduced in Section 4.
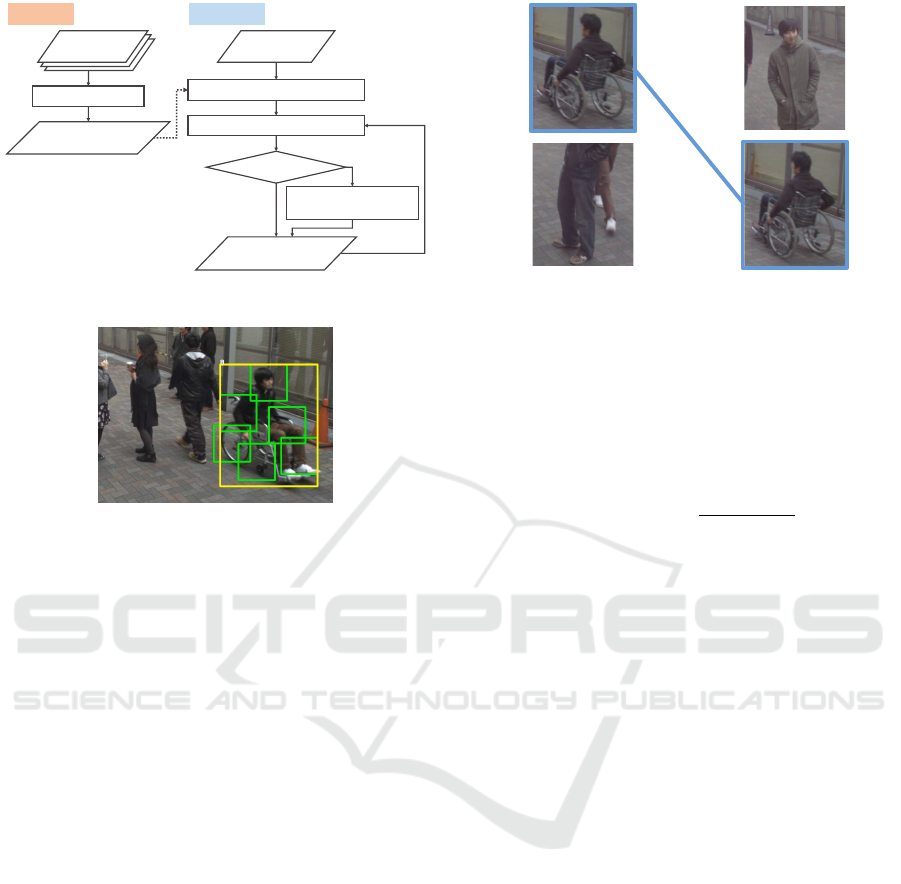
Figure 2 shows the process flow of the proposed
framework. In the training phase, a wheelchair-user
detector is trained. In the detection phase, wheelchair
users are detected from each frame of an input se-
quence by using the trained detector. The detections
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
166
Training Detection
Detect wheelchair users (ܦ
௧
)
Input
sequence
Final detection
results (
෩
ܦ
௧
)
Associate with past detections
Estimate position with
parts-based tracking
Associated
Yes
No
les
es
Train the detector
Detector of
wheelchair users
Training
samples
Figure 2: Process flow of the proposed framework.
Figure 3: Example of detection using DPM.
from consecutive frames are associated to construct
their trajectories. When some detections were not
associated, the proposed parts-based tracking is per-
formed to estimate their locations.
3.1 Detection by a Parts-based Detector
Full bodies of wheelchair users and their parts in each
frame of an input sequence are detected by a parts-
based detector. In this paper, we use DPM (Felzen-
szwalb et al., 2010) which can simultaneously detect
both of them. Figure 3 shows an example of detec-
tions using DPM for wheelchair users.
In the training phase, a DPM detector for
wheelchair users is trained with many positive and
negative images. In the detection phase, wheelchair
users are detected from each frame of input sequences
by the trained DPM detector.
3.2 Association of the Detections
For each frame of an input sequence, detection re-
sults of wheelchair users are associated to construct
their trajectories. Let
˜
D
t−1
= {d
(1)
t−1
, d
(2)
t−1
, ...,d
(n
t−1
)
t−1
}
be the final detection results obtained with the pro-
posed method in the (t − 1)-th frame, and D
t
=
{d
(1)
t
, d
(2)
t
, ..., d
(n
t
)
t
} be the detection results obtained
with the parts-based detector in the t-th frame. First,
the similarity between each pair in
˜
D
t−1
and D
t
is cal-
culated to find similar detection results. In this paper,
Detection results
(detector + tracking)
in the ሺݐ െ ͳሻ-th frame
Detection results
(detector)
in the ݐ-th frame
Figure 4: Example of the detection association process.
we use an overlap ratio Ω(d
(i)
t−1
, d
( j)
t
) between the pair
of detections (d
(i)
t−1
, d
( j)
t
) as the similarity, which is de-
fined as follows:
Ω(d
(i)
t−1
, d
( j)
t
) =
|d
(i)
t−1
∩ d
( j)
t
|
|d
(i)
t−1
∪ d
( j)
t
|
. (1)
The similarity S(d
(i)
t−1
, d
( j)
t
) between d
(i)
t−1
and d
( j)
t
is
defined as follows:
S(d
(i)
t−1
, d
( j)
t
)=
Ω(d
(i)
t−1
, d
( j)
t
) if Ω(d
(i)
t−1
, d
( j)
t
)>θ
Ω
0 otherwise
.
(2)
Detection results are associated by selecting the pair
of detections which has a larger similarity than a
threshold. Figure 4 shows an example of association
of the detection results.
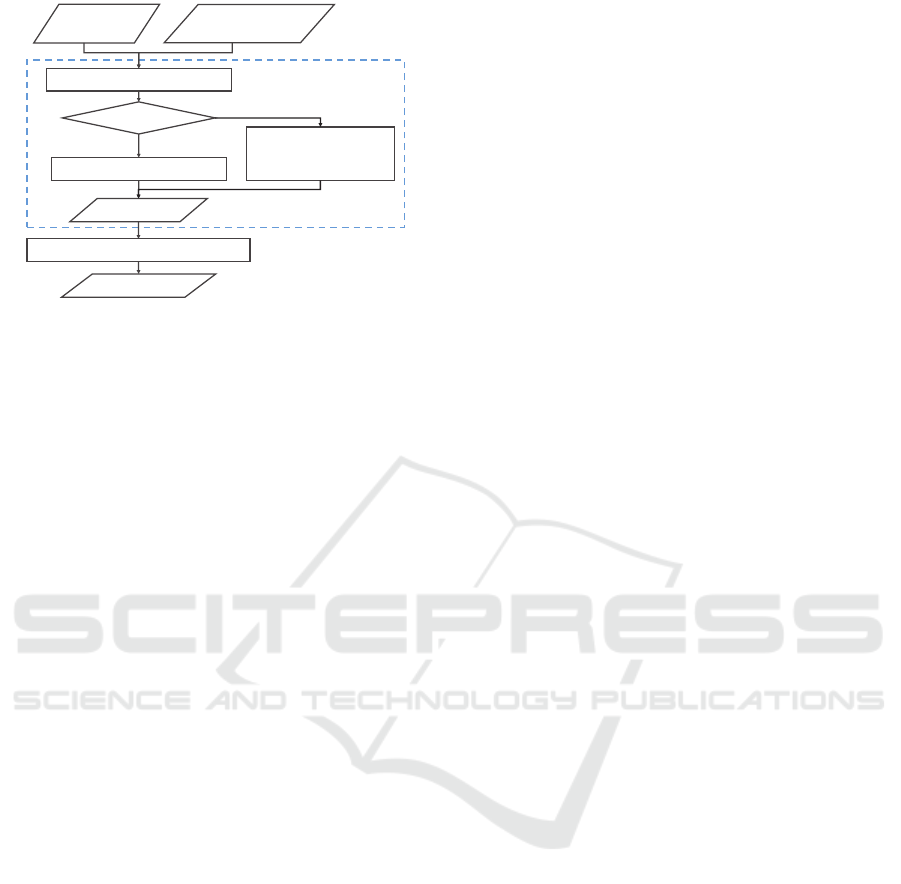
3.3 Estimation using Parts-based
Tracking
When the detector lost the target detected more than
θ
d
times continuously due to occlusions, his/her posi-
tion is estimated by tracking. While his/her fullbody-
tracking is difficult due to occlusions, some parts of
the body are often visible evenif it is almost occluded.
We perform the parts-based tracking introduced in
Section 4 to estimate his/her positon. Detection re-
sults of parts by the parts-based detector are utilized
as an initial bounding box of parts-tracking.
Parts-based tracking is conducted based on the po-
sition of the target in the (t − 1)-th frame, and its po-
sition after the t-th frame is estimated from its past
trajectory and the position of its confidently-tracked
parts.
Parts-based tracking continues up to f
1
frames. It
terminates in the following cases:
Wheelchair-user Detection Combined with Parts-based Tracking
167
Appearance-based tracking
Positions in the
ሺݐ െ ͳሻ-th frame
Tracked result
ݐ-th frame
Confidence
High
Update appearance model
Part position
Low
Full-body bounding box estimation
Each part
Prediction based on
positional relationship
and trajectory
Figure 5: Process flow of the proposed parts-based tracking
method.
• The tracked result and the detection result were
associated successfully, i.e., the target was de-
tected by the parts-based detector again before f
1
frames passed.
• All parts of the target were occluded for f
2
con-
secutive frames. This can suppress false detec-
tions caused by failed parts-based tracking.
4 PARTS-BASED TRACKING
Parts-based approach is robust to the target’s occlu-
sions. Since the size of parts is small, it is difficult
to distinguish them from other objects. Hence, parts-
based tracking which only considers their appearance
can drift easily. To track them accurately, the pro-
posed parts-based tracking method compensates the
position of parts consideringtheir past trajectories and
inter-parts positional relationships.
Figure 5 shows the process flow of the proposed
parts-based tracking method. First, the proposed
method tracks each part based on its appearance and
calculates each tracking confidence. If the tracking
confidence of the part is high, its appearance model
is updated. If the confidence is low, its position is
extrapolated based on their past trajectories and inter-
parts positional relationships. We integrate these in-
formation into a score map on the center position of
the target, and adopt the position that maximizes this
score. In the end, the full-body bounding box is esti-
mated based on the parts locations.
4.1 Appearance-based Tracking and
Confidence Calculation
The proposed method tracks each part of a target us-
ing KCF tracker (Henriques et al., 2015). KCF tracks
a target convolving an input image with a filter de-
signed to produce correlation peaks for the target in
a response map, while producing low responses to
background. The filter is updated over time to adapt
to appearance change.
The proposed method tracks each part based on its
appearance and calculates each tracking confidence.
When it is difficult to track the part (e.g., its size is
small, or it is occluded), its confidence tends to get
lower. Therefore, we change the tracking method ac-
cording to the confidence.
In the following explanation, we describe the pro-
cess for each part. First, the response map of KCF
tracker for the part is caluculated. Next, tracking con-
fidence is calculated from the response map. We uti-
lize the Peak-to-Sidelobe Ratio (PSR) of the response
map as the tracking confidence. PSR quantifies the
strength of correlation peak relative to the sidelobe
area in a response map. In this paper, we define the
sidelobe as a square area around the peak which has
15% area of the response map.
The parts which have higher PSR values than a
threshold θ
PSR
are recognized as highly confident.
The positions of the parts with high confidence are
set to be the positions of correlation peaks in their re-
sponse map. In contrast, the tracked results which has
lower confidence than the threshold are unreliable.
We estimate their positions by a method introduced
in Section 4.2.
Note that the appearance model of each KCF
tracker is updated overtime, but updating a lowly con-
fident target’s model leads to the decline of tracking
accuracy. Therefore, we update models of parts only
when they have high confidence.
4.2 Prediction of Parts Positions
The positions of the parts with low confidence are es-
timated based on their trajectories and inter-parts po-
sitional relationship. We integrate these information
into score map S on the center position of the part,
and adopt the position that maximizes this score. Let
p
(i)
(i = 1, ..., n) be the i-th part of the target, P
l
be
the set of parts with low confidence, and P
h
be the set
of parts with high confidence in the current frame t.
Note that P
l
∩ P
h
= Ø, |P
l
∪ P
h
| = n holds. The center
position
ˆ
x
x
x
(i)
t
of the low-confident part p
(i)
∈ P
l
in the
t-th frame is estimated as follows:
ˆ
x
x
x
(i)
t
= arg max
x
x
x
(i)
t
S(x
x
x
(i)
t
), (3)
where x
x
x
(i)
t
= (x
(i)
t
, y
(i)
t
) is the center position of the part
p
(i)
in the image coordinate.
ˆ
x
x
x
(i)
t
will be the position
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
168
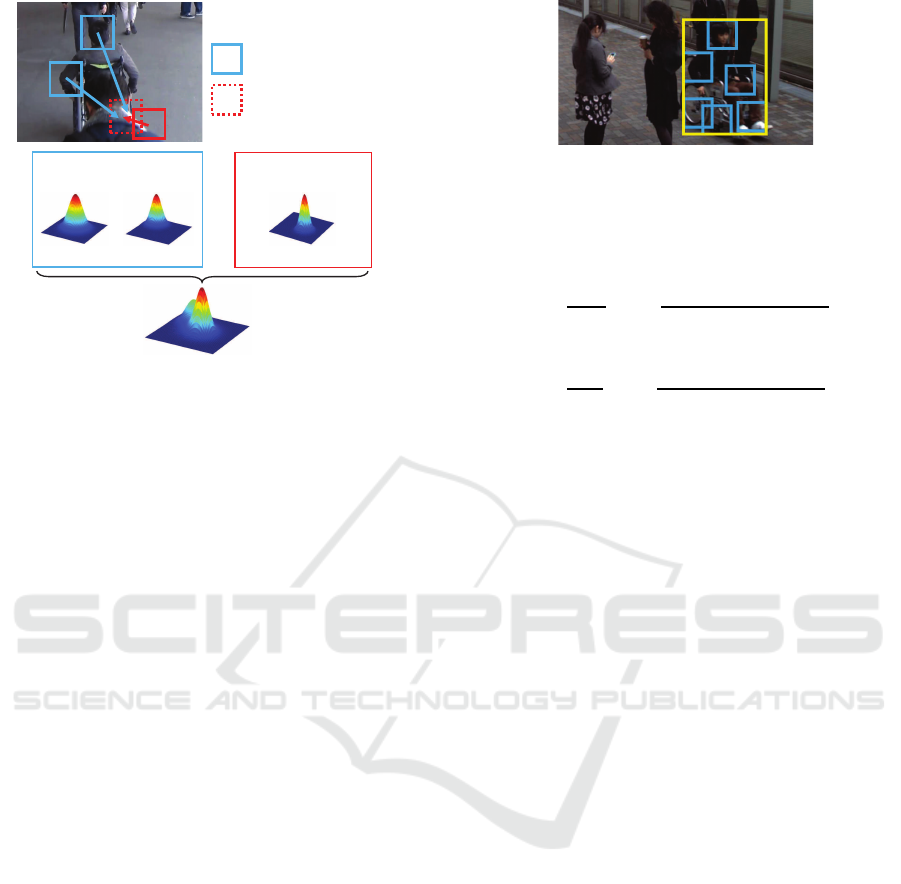
+
Parts with high confidence
Parts with low confidence
(a) (b)
+
Estimation based on
positional relationship
(a)
(b)
(c)
Estimation based on
trajectory
(c)
Score map
Figure 6: Calculation of the score on the position of the part
recognized as occluded.
that maximizes the score S(x
x
x
(i)
t
). The width and the
height of the estimated bounding box of the part are
set to be the same as those in the (t−1)-th frame. The
score map S on position x
x
x
(i)
t
of part p
(i)
∈ P
l
in the t-th
frame is defined as follows:
S(x
x
x
(i)
t
) =
∑
p
( j)
∈P
h
P
b
(x
x
x
(i)
t
|x
x
x
( j)
t
, x
x
x
(i)
t−1
, x
x
x
( j)
t−1
)
+λP
u
(x
x
x
(i)
t
|x
x
x
(i)
t−1
, x
x
x
(i)
t−2
). (4)
The first term in the right-hand side of Equation (4)
is the sum of scores on the position of part p
(i)
based
on inter-parts positional relationships in the (t − 1)-th
frame. The more parts there are with high confidence,
the more reliable and larger this score is. The sec-
ond term in the right-hand side of the Equation (4) is
the scores based on its trajectory. λ is the trade-off
between the first term and the second term.
The score map P
b
based on inter-parts positional
relationship between p
( j)
∈ P
h
and p
(i)
∈ P
l
in the t-
th frame is modeled by the sum of bivariate normal
distribution N (µ
µ
µ
b,(i)
t
, Σ
Σ
Σ
b,(i)
t
) as shown in Figure 6. The
mean vector µ
µ
µ
b,(i)
t
and the variance-covariance matrix
Σ
Σ
Σ
b,(i)
t
are defined as follows:
µ
µ
µ
b,(i)
t
= x
x
x
( j)
t
+ (x
x
x
(i)
t−1
− x
x
x
( j)
t−1
), (5)
Σ
Σ
Σ
b,(i)
t
=
σ
2
x,t,(i)
0
0 σ
2
y,t,(i)
!
. (6)
The mean vector µ
µ
µ
b,(i)
t
is the sum of the position of
p
( j)
and an offset vector from p
( j)
to p
(i)
in the (t −
1)-th frame. Diagonal components σ
x,t,(i)
, σ
y,t,(i)
of
the variance-covariance matrix Σ
Σ
Σ
b,(i)
t
is calculated as
Figure 7: Example of the estimation of the full-body bound-
ing box from part bounding boxes.
follows:
σ
x,t,(i)
=
w
t−1
s
1−
PSR
p
( j)
,t
∑
p
(k)
∈P
h
PSR
p
(k)
,t
, (7)
σ
y,t,(i)
=
h
t−1
s
1−
PSR
p
( j)
,t
∑
p
(k)
∈P
h
PSR
p
(k)
,t
, (8)
where w
t−1
and h
t−1
are the width and the height of
p
(i)
in the (t − 1)-th frame respectively. The larger
they are, the shorter and wider the normal distribution
becomes. PSR(p
( j)
,t) denotes the PSR of p
( j)
in the
t-th frame. The larger PSR(p
( j)
,t) relative to that of
other parts with high confidence encourages smaller
σ
x,t,(i)
and σ
y,t,(i)
, i.e., the lower the confidence is,
the shorter and wider the distribution becomes. s is
a scale parameter.
The score map P
u
based on the trajectory of p
(i)
is also modeled by the bivariate normal distribution
N (µ
µ
µ
u,(i)
t
, Σ
Σ
Σ
u,(i)
t
). The mean µ
µ
µ
u,(i)
t
of the distribution is
defined as follows:
µ
µ
µ
u,(i)
t
= x
x
x
(i)
t−1
+ (x
x
x
(i)
t−1
− x
x
x
(i)
t−2
). (9)
µ
µ
µ
u,(i)
t
is the sum of the position in the (t − 1)-th frame
and the displacement vector from the (t − 2)-th frame
to the (t − 1)-th frame. The variance-covariance ma-
trix Σ
Σ
Σ
u,(i)
t
is a diagonal matrix same as Equation 6,
where σ
x,t,(i)
and σ
y,t,(i)
are set to be in proportion to
the width and the height of p
(i)
in the (t −1)-th frame,
respectively.
4.3 Full-body Bounding Box Estimation
In each frame, the tracked results of parts are put to-
gether to estimate a full-body boundingbox of the tar-
get. The bounding box of the whole target is defined
to be a minimum bounding box including all bound-
ing boxes of parts. Figure 7 shows an example of this
integration. The inner small rectangles are bounding
boxes of parts, and the outer large rectangle is the es-
timated bounding box of the whole target.
Wheelchair-user Detection Combined with Parts-based Tracking
169
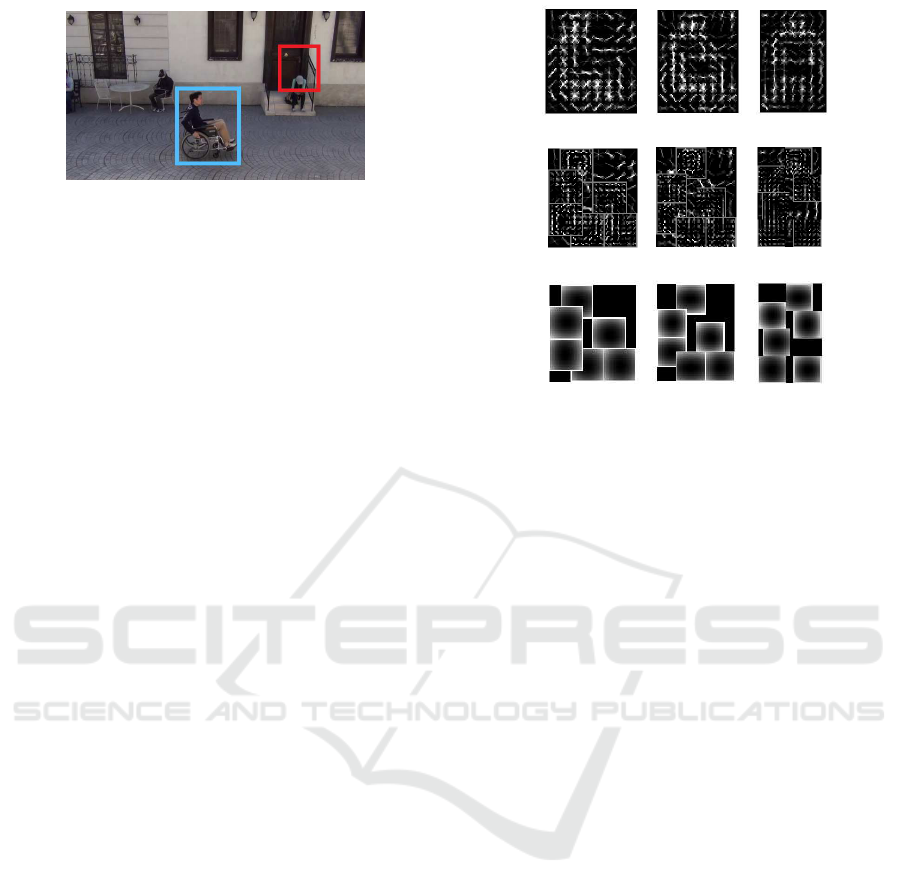
Figure 8: Example of positive and negative training sam-
ples.
5 EXPERIMENT
5.1 Experimental Condition
To evaluate the effectiveness of the proposed method
in the detection of wheelchair users under a crowded
scene, we conducted an experiment. In the experi-
ment, they were detected from video sequences cap-
tured in an environment where many pedestrians sur-
rounded them. We compared the following methods:
•
DPM
: Using only DPM detector.
•
DPM + Full-body tracking
: Using DPM de-
tector combined with full-body tracking of tar-
gets.
•
DPM + Multi-tracker
: Using DPM detector
combined with multi-person tracker (Zhang et al.,
2012).
•
DPM + Parts-tracker
(Proposed method): Us-
ing DPM detector combined with parts-based
tracking.
For the evaluation of
DPM + Multi-tracker
, we
used the publicly available implementation (Zhang
et al., 2013) provided by the authors. We set the pa-
rameters for tracking as f
1
= 20 frames and f
2
= 15
frames.
The overlap ratio between detections by each
method and the ground truth was calculated. Detec-
tions are considered to be correct when they over-
lapped more than 50% with the ground-truth bound-
ing box. As an evaluation criterion of detection accu-
racy, we employed precision, recall, and F-measure.
5.2 Datasets
5.2.1 Training Data
In the experiment, 2,400 images of wheelchair users
captured both indoors and outdoors were used as
positive samples to train the DPM detector. For
each training image, we annotated bounding boxes of
wheelchair users manually. As negative samples, we
(a) Root filters
(b) Part filters
(c) Deformation costs
Figure 9: Three-components DPM trained for wheelchair
users.
prepared 4,800 images randomly cropped from the
background of the training images. Figure 8 shows
an example of positive and negative training samples.
The larger rectangle in blue shows a positive sample,
and the smaller rectangle in red shows a negativesam-
ple.
5.2.2 Test Data
As test data, we prepared seven video sequences cap-
tured outdoors. The size of each frame in the test
sequences was 1, 280× 1, 024 pixels. The length of
each sequence was from approximately 30 seconds to
1 minutes, with a frame rate of 6 fps. The number of
images in the test sequences was 1,621 and included
a cumulative total of 1,175 wheelchair users.
Each frame in the test sequences included at most
a single wheelchair user that was often occluded by
pedestrians around him/her. There were two cases
that wheelchair users existed in the initial frame or en-
tering the frame. Wheelchair users exiting the frame
were also included.
For each frame of the sequences, bounding boxes
of wheelchair users were manually annotated as
ground-truth for evaluation. In case a wheelchair user
was occluded, we annotated a likely bounding box by
considering the context.
5.3 Model of Wheelchair Users
In the experiment, we used a three-components DPM
detector for detection. In training of the DPM de-
tector, training samples were divided into three clus-
ters based on their aspect ratio, and the model of
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
170
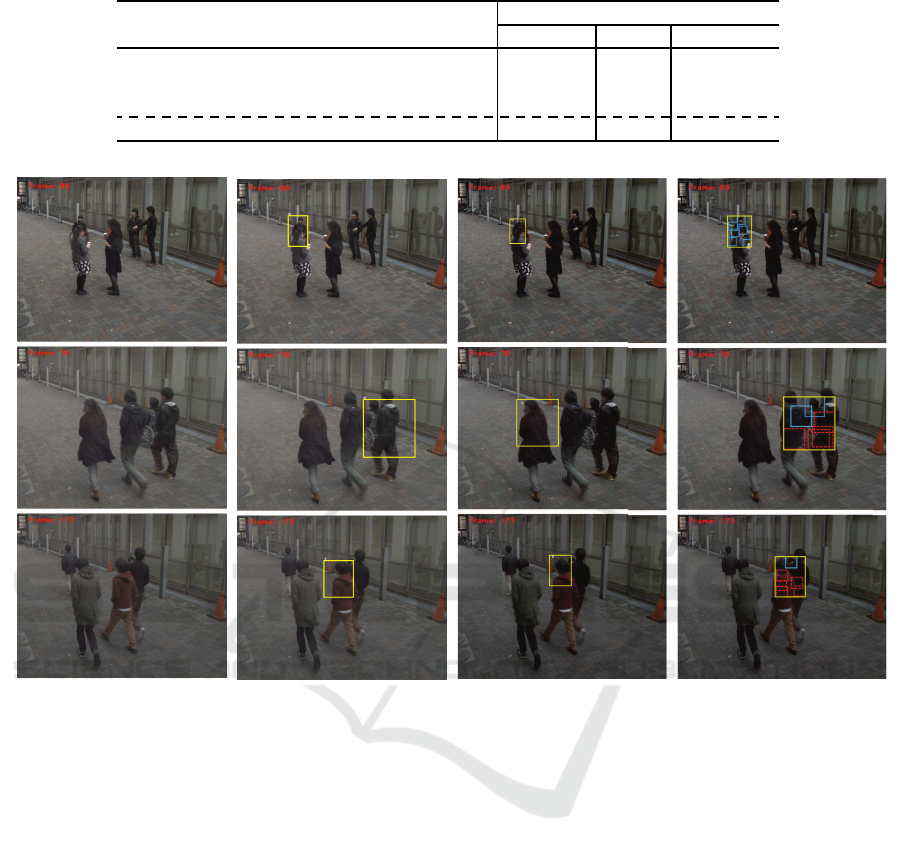
Table 1: Detection accuracy of wheelchair users by each method.
Criterion
Method Precision Recall F-measure
DPM
0.975 0.671 0.795
DPM + Full-body tracking
0.789 0.808 0.798
DPM + Multi-tracker
(Zhang et al., 2012) 0.516 0.585 0.548
DPM + Parts-tracker
(Proposed method) 0.859 0.848 0.853
(a)
DPM
(b)
DPM + Full-body
tracking
(c)
DPM + Multi-tracker
(Zhang et al., 2012)
(d)
DPM + Parts-tracker
(Proposed method)
Figure 10: Examples of detections by each method.
wheelchair users was constructed for each cluster.
The number of parts each DPM model included was
experimentally set to six. The training result for
wheelchair users is visualized in Figure 9. In the ex-
periment, the publicly available code of DPM pub-
lished by Girshick et al. (Girshick et al., 2012) was
used.
5.4 Results & Discussions
Table 1 shows the result of detections from test se-
quences. This result indicates that the proposed
method is more accurate on recall and F-measure
than other comparative methods. From this result,
the effectiveness of the proposed method (
DPM +
Parts-tracker
)for detection in a crowded scene can
be confirmed. Note that the proposed method is less
accurate in precision than
DPM
. This is because the
failure of tracking leads to an increase of false pos-
itives. However, the proposed method achieved the
highest precision of the methods which used tracking.
This indicates that the proposed parts-based tracking
is more accurate than other tracking methods. The de-
tection accuracy of
DPM + Multi-tracker
is worse
than
DPM
. Since
DPM + Multi-tracker
used full-
body tracking, the tracking often failed when targets
were occluded. In contrast, the proposed method used
parts-based tracking, so it improved the detection ac-
curacy even if the targets were occluded.
Figure 10 shows examples of detections by the
comparative methods and the proposed method. Each
row of Figure 10 shows the detection result by each
method in the same frame of the test sequences. In the
figure of the proposed method, the inner small rectan-
gles indicated by a brokenline are predicted bounding
boxes of parts with low confidence. The other inner
rectangles are bounding boxes of parts with high con-
fidence. The outer large rectangles are the estimated
Wheelchair-user Detection Combined with Parts-based Tracking
171

full-body bounding boxes of the targets. The results
in the first row indicate that the target which could
not be detected by the DPM detector was successfully
detected by being combined with tracking. These re-
sults show the effectiveness of combining detection
with tracking. Moreover, the results in the second
row and the third row show that the proposed method
estimated bounding boxes of wheelchair users more
accurately than other comparative methods. The pro-
posed parts-based tracking could estimate the bound-
ing boxes even if most of the parts were occluded.
These results show that proposed parts tracking is ro-
bust against heavy occlusions and it can compensate
false negatives of the detector satisfactorily.
6 CONCLUSIONS
In this paper, we proposed a method for detecting
wheelchair users accurately in a crowded scene. De-
tection of wheelchair users was difficult when they
were occluded, but the proposed method coped with
it by combining the detector with parts-based track-
ing. To track the parts of wheelchair users accurately,
the proposed method estimated the position of parts
with low tracking confidence based on their trajecto-
ries and inter-parts positional relationships. Experi-
mental results showed that the proposed method can
detect them in a crowded scene more accurately than
comparative methods.
As future work, we will consider a more effective
score function in parts-based tracking to further im-
prove locating of parts with low confidence. We will
also modify the method for associating the detection
results. In addition, we will introduce sophisticated
motion dynamics of wheelchair users.
ACKNOWLEDGEMENTS
Parts of this research were supported by MEXT,
Grant-in-Aid for Scientific Research. We would like
to thank the members of the laboratory for their coop-
eration as subjects for creating the dataset.
REFERENCES
Bolme, D. S., Beveridge, J. R., Draper, B., and Lui, Y. M.
(2010). Visual object tracking using adaptive correla-
tion filters. In Proceedings of the 23rd IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition, pages 2544–2550.
Bolme, D. S., Draper, B. A., and Beveridge, J. R. (2009).
Average of synthetic exact filters. In Proceedings of
the 22nd IEEE Computer Society Conference on Com-
puter Vision and Pattern Recognition, pages 2105–
2112.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Proceedings of the 18th
IEEE Computer Society Conference on Computer Vi-
sion and Pattern Recognition, volume 1, pages 886–
893.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrim-
inatively trained part based models. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
32(9):1627–1645.
Girshick, R. B., Felzenszwalb, P. F., and McAllester,
D. (2012). Discriminatively trained de-
formable part models, release 5. Available at:
http://people.cs.uchicago.edu/∼rbg/latent-release5/
[Accessed 14 Sept. 2016].
Henriques, J. F., Caseiro, R., Martins, P., and Batista, J.
(2015). High-speed tracking with kernelized corre-
lation filters. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 37(3):583–596.
Huang, C.-R., Chen, C.-S., and Chung, P.-C. (2006). Con-
trast context histogram — A discriminating local
descriptor for image matching. In Proceedings of
the 18th IEEE International Conference on Pattern
Recognition, volume 4, pages 53–56.
Huang, C.-R., Chung, P.-C., Lin, K.-W., and Tseng, S.-C.
(2010). Wheelchair detection using cascaded decision
tree. IEEE Transactions on Information Technology in
Biomedicine, 14(2):292–300.
Myles, A., Lobo, N. D. V., and Shah, M. (2002).
Wheelchair detection in a calibrated environment. In
Proceedings of the 5th Asian Conference on Computer
Vision, pages 706–712.
Pan, J. and Hu, B. (2007). Robust occlusion handling in ob-
ject tracking. In Proceedings of the 20th IEEE Com-
puter Society Conference on Computer Vision and
Pattern Recognition, pages 1–8.
Zhang, J., Presti, L. L., and Sclaroff, S. (2012). Online
multi-person tracking by tracker hierarchy. In Pro-
ceedings of the 9th IEEE International Conference
on Advanced Video and Signal-Based Surveillance,
pages 379–385.
Zhang, J., Presti, L. L., and Sclaroff, S.
(2013). Online multi-person tracking by
tracker hierarchy. Available at: http://cs-
people.bu.edu/jmzhang/tracker
hierarchy/
Tracker
Hierarchy.htm [Accessed 14 Sept. 2016].
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
172
