
Object Detection Oriented Feature Pooling
for Video Semantic Indexing
Kazuya Ueki and Tetsunori Kobayashi
Faculty of Science and Engineering, Waseda University, Tokyo, Japan
Keywords:
Video Semantic Indexing, Video Retrieval, Object Detection, Convolutional Neural Network.
Abstract:
We propose a new feature extraction method for video semantic indexing. Conventional methods extract fea-
tures densely and uniformly across an entire image, whereas the proposed method exploits the object detector
to extract features from image windows with high objectness. This feature extraction method focuses on “ob-
jects.” Therefore, we can eliminate the unnecessary background information, and keep the useful information
such as the position, the size, and the aspect ratio of a object. Since these object detection oriented features are
complementary to features from entire images, the performance of video semantic indexing can be further im-
proved. Experimental comparisons using large-scale video dataset of the TRECVID benchmark demonstrated
that the proposed method substantially improved the performance of video semantic indexing.
1 INTRODUCTION
Today, many digital videos are uploaded to social net-
works such as YouTube and Facebook. According to
2015’s statistics, 400 hours of video are being up-
loaded to YouTube every minute. For this reason,
video semantic indexing are becoming vastly more
important.
Video semantic indexing has been studied for
many years in the semantic indexing (SIN) task
of TRECVID (Smeaton et al., 2006) (Over et al.,
2015): TRECVID is an annual benchmarking con-
ference organized by the National Institute of Stan-
dards and Technology (NIST). Before 2012, most re-
search groups extracted local features such as SIFT,
HOG, and LBP, densely and evenly from a entire im-
age. On the other hand, after 2013, for the high per-
formance reason, the deep learning, especially con-
volutional neural network (CNN), have been mainly
used as the feature extraction, and now CNNs ac-
count for most of SIN systems. However, there was
no substantial breakthrough over the past two or three
years, other than a certain amount of improvement by
making CNN’s structure deeper (Simonyan and Zis-
serman, 2014) (Szegedy et al., 2014).
Conventional methods, e.g. local descriptor based
feature extraction and CNN based feature extraction,
have a common major disadvantage: features are
evenly extracted from a entire image. For exam-
ple, in dense SIFT sampling, features are extracted
from both relevant and irrelevant image patches in a
uniform manner using a fixed pixel interval between
regions. As a result, extracted features are forced
to contain redundant information for video retrieval.
Similar problem occurs in CNN based feature extrac-
tion, because an entire image is directly inputted to
CNN and convolution is performed by sliding the fil-
ter over the image.
In this paper, by focusing on “objects” using a ob-
ject detector as a feature extractor, we attempted to
remove the useless noise (e.g. background) and add
more information (e.g. the position and the size of
objects) that were deleted by conventional methods.
As for the object detector, we used recently proposed
Faster R-CNN (Ren et al., 2015) that is known for
the high detection rates and the high computational
speed. In our experiments, we confirm that features
extracted with the proposed method are complemen-
tary to the conventional features and they contribute
much to the performance of video semantic indexing
by combining with the state-of-the-art feature extrac-
tor.
This paper is organized as follows: In Section
2, we describe system perspective of video seman-
tic indexing. In Section 3, we present the proposed
method. In Section 4, we discuss experiments to val-
idate the effectiveness of our proposed method. In
Section 5, we give our conclusions and suggestions
for future research.
44
Ueki K. and Kobayashi T.
Object Detection Oriented Feature Pooling for Video Semantic Indexing.
DOI: 10.5220/0006099600440051
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 44-51
ISBN: 978-989-758-226-4
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
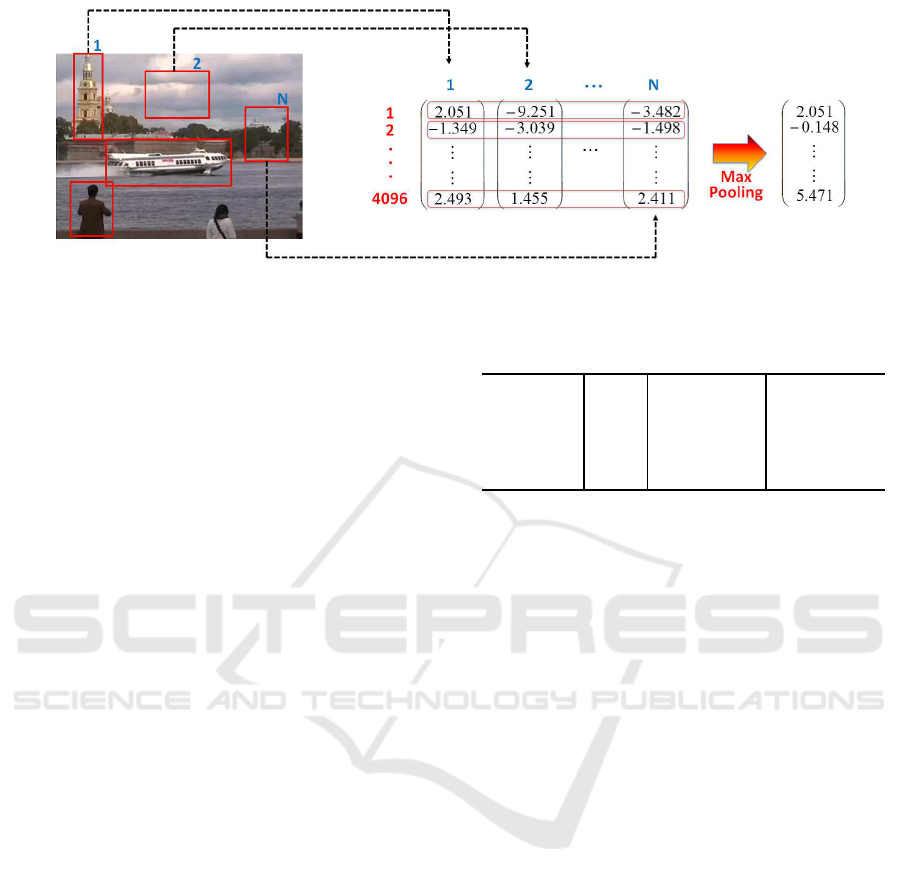
Figure 1: Features are encoded into a single vector by max-pooling.
2 SYSTEM PERSPECTIVE
Generally, the video semantic indexing pipeline of
representative methods consists of three steps (Snoek
et al., 2015) (Ueki and Kobayashi, 2015):
1. Extracting features from image frame (local fea-
ture extraction or CNN-based feature extraction),
2. Classifying the presence or absence of a detection
target (with SVM),
3. Fusing results of multiple classifiers (mainly with
late fusion).
In this paper, we also utilize the same pipeline.
For feature extraction, the previous mainstream
methods were the combination of local feature ex-
tractor (e.g. SIFT (Lowe, 1999) (Mikolajczyk and
Schmid, 2004) (Lowe, 2004), HOG (Dalal and
Triggs, 2005), or LBP (Ojala et al., 1994)) and the
encoding (e.g. Bag-of-Features (Csurka et al., 2004)
or Fisher Vector (S´anchez et al., 2013)) to obtain fixed
length vectors. Recent years, however, because of the
very high performance of CNNs trained on the large-
scale dataset (e.g. ImageNet (Russakovsky et al.,
2015)), CNN’s hidden layer outputs have been com-
monly used also as the feature extraction for video
semantic indexing (Snoek et al., 2015) (Ueki and
Kobayashi, 2015). In this paper, we exploit CNN
based feature extraction as the baseline, and attempt
to compensate for the disadvantages of CNN based
method with our proposed object detection oriented
feature extraction.
Next, to judge whether a detection target exists in
an image, a SVM is trained using positive and neg-
ative training samples for each target, respectively.
There is only a limited number of positive samples,
and the number of positive samples in each detec-
tion target is generally unbalanced. Therefore, the
CNN/SVM tandem architecture is more appropriate
than CNN alone directly trained with target data.
Table 1: Twenty object categories used the Pascal VOC.
aeroplane bus dining table potted plant
bicycle
car dog sheep
bird cat horse sofa
boat
chair motorbike train
bottle cow persont tv monitor
As for the fusion of results acquired from multi-
ple classifiers, the late fusion, namely the score-level
fusion, is carried out. In our setting, object detec-
tion based (specifically, Faster R-CNN based) feature
extraction method is integrated with the CNN based
feature extraction method to verify whether these fea-
tures are complementary or not. Previously, multiple
kernel learning (MKL) (Varma and Ray, 2007) was
used to combine different types of features. However,
MKL has not been used recently, because the score-
level fusion is simple and fast, and its perfromacne
is comparable to MKL. For this reason, we integrate
multiple results by simply summing SVMs’ scores.
3 PROPOSED METHOD
3.1 Object Detection Oriented Feature
Extraction
The proposed method extracts features using a ob-
ject detector to obtain complementary features to the
conventional CNN based method. The CNN based
method extracts features from an entire image, and so
it is affected by the useless background information,
and other useful information such as the position and
the size of objects is excluded. Thus, our object detec-
tion oriented feature extraction would extract features
from high objectness image region to compensate for
these shortcomings.
Object Detection Oriented Feature Pooling for Video Semantic Indexing
45

We chose Faster R-CNN (Ren et al., 2015) from
some of object detectors, specifically the pre-trained
network on the Pascal VOC detection data (20 ob-
ject classes as shown in Table 1) (Everingham et al.,
2010). Faster R-CNN, as its name suggests, is a
fast object detector based on CNNs, and achieves the
state-of-the-art performance on the Pascal VOC de-
tection dataset . This includes a region proposal net-
work (RPN) and an object detection network, and so
the network is effectively trained end-to-end. When
we input an image to the Faster R-CNN, approx-
imately 200 bounding boxes and their probability
scores for individual object categories can be ob-
tained. In this paper, a 4,096 dimensional feature
vector corresponding to each bounding box is ex-
tracted from the first fully-connected layer. That is,
we can obtain the set of bounding boxes and their
corresponding feature vectors: {(b
i
, v
i
)}
N
i=1
, where
b
i
= (x
i
, y
i
, w
i
, h
i
) is the i-th bounding box, that speci-
fies its top-left corner (x
i
, y
i
) and its width and height
(w
i
, h
i
), and N is the number of bounding boxes in an
image.
3.2 Feature Pooling
Here, we explain how to extract a fixed-length feature
vector from multiple feature vectors with the Faster
R-CNN. The basic method is that feature vectors over
all the bounding boxes are bound to one fixed-length
feature vector by element-wise max-pooling. That
is, the value of the elements in the same dimension
are compared across all the bounding boxes, and the
maximum value is selected as shown in Fig. 1. This
method, however, eliminate the position and the size
of objects, and so we attempt to pool feature vectors
in the following three ways.
First, we leverage the idea of spatial pyramid
matching (SPM) (Schmid, 2006): an image is divided
into sub-regions and features are pooled over each im-
age sub-region. We divide an image into three sub-
regions; on the upper, in the middle, and at the bottom
of the image, and assign bounding boxes to one of
three sub-regions based on the center pixel of bound-
ing boxes as shown in Fig. 2. Then a feature vec-
tor is created by the max-pooling for each sub-region.
Hereinafter, this method is referred to as spatial pool-
ing. The SPM generally has to handle very high-
dimensional features, because a vector extracted from
an entire image and multiple vectors obtained from
sub-regions are concatenated. To reduce the compu-
tational cost, we separately treat a feature from each
sub-region, so that features are fed into the individual
SVM training. Using this approach, statistical spa-
tial information can be saved into feature vectors: e.g.
“bicycle” and “person“ tend to appear in the middle
of the image, the background image region is mainly
at the top or bottom of the image, or there are only
few objects on the upper part of the image, and so on.
Secondly, features are pooled depending on the
size of bounding boxes as shown in Fig. 3. Here-
inafter this method is called size pooling. This method
can help distinguish detailed differences for detecting
similar targets by treating small, medium, and large
sized objects separately. In our experiments, we di-
vide all the bounding boxes equally into three parts
by their sizes; small, medium, and large.
Thirdly, features are pooled depending on the as-
pect ratio of bounding boxes as shown in Fig. 4.
Hereinafter this method is called aspect ratio pooling.
In our experiments, we divide bounding boxes into
three; objects that are vertically long, nearly square,
or horizontally long.
Object detection oriented feature extraction and
these three pooling methods is expected to compen-
sate for information lost by the simple CNN-based
feature extractor and improve the performance of
video semantic indexing.
3.3 Classification
After extracting pooled features with the object detec-
tor, SVMs are trained on task-specific limited training
data. This is because the number of positive train-
ing samples for each target category is very limited in
most categories: for example, there are only several
hundred or approximately one thousand samples for
each category in TRECVID benchmark data. There-
fore, the CNN/SVM tandem architecture is consider
to be a better choice than a single CNN trained from
scratch on very limited training samples.
The object detector based feature extraction has
similar properties. Thus, we also train SVMs with
task-specific data after extracting and pooling fea-
tures.
3.4 System Integration
We explain how to combine the results of both the
conventional CNN based and the proposed Faster R-
CNN based feature extraction methods. There are
mainly two types of fusion methods; (1) concatenat-
ing multiple feature vectors to create one feature vec-
tor, and (2) computing final scores by simply sum-
ming multiple scores from individual SVMs. Because
the former method has a problem of computational
cost caused by the very high dimensional features, we
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
46
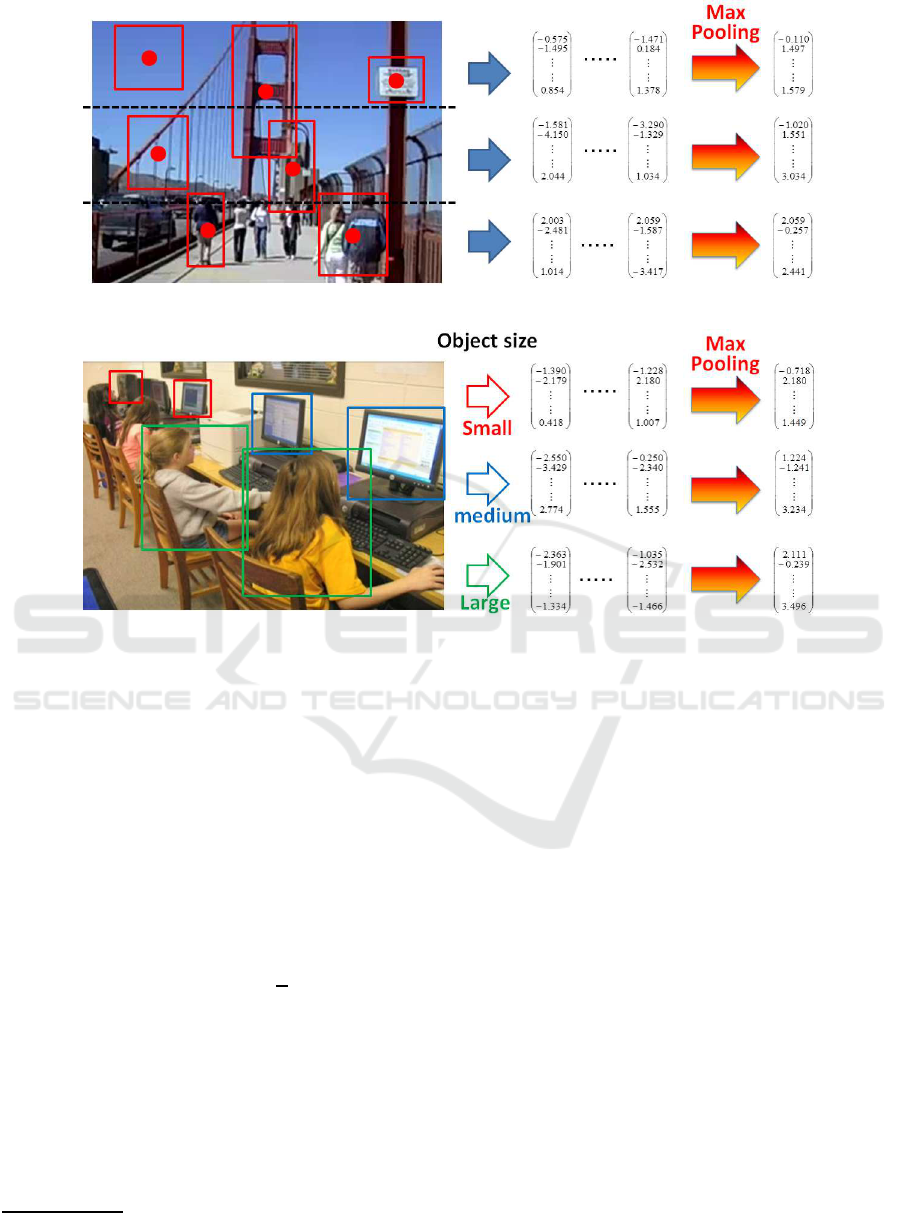
Figure 2: Example of creating feature vectors by spatial pooling.
Figure 3: Example of creating feature vectors by size pooling.
chose the latter method
1
. The fusion score is calcu-
lated by:
s
total
= αs
CNN
+ (1− α)s
R−CNN
, (1)
where s
CNN
and s
R−CNN
are scores by the CNN based
and the Faster R-CNN based methods, respectively.
α is the fusion weight having a value from zero to
one. The score of Faster R-CNN method s
R−CNN
is
calculated by summing the score with entire image
s
entire
and scores with divided parts s
part
(i):
s
R−CNN
= βs
entire
+ (1− β)
1
d
d
∑
i=1
s
part
(i), (2)
where β is the fusion weight having a value from zero
to one, and d is the number of partitions (three in our
experiments).
1
In a preliminary experiment, we found that the latter
method showed superior performance.
4 EXPERIMENTS
4.1 Database
We evaluated the proposed method on TRECVID’s
2014 SIN task dataset. This video material used
in TRECVID SIN task consists of consumer videos
from the Internet Archive. Therefore, these videos
include not only the detection target, such as ob-
jects (e.g., Airplane, Computers, and etc.), actions
(e.g., Running, Singing, and etc.), scene (e.g., Class-
room, Nighttime, and etc.), but also the huge number
of irrelevant data. In TRECVID, participants have
to judge whether the target is visible or not at any
time within a shot. Here, a shot is an uninterrupted
video clip recorded by a single camera. The average
length of each video shot is approximately 5.4 sec-
onds. The TRECVID 2014 dataset includes 549,434
training shots (approximately 800 hours of videos)
and 106,913 testing shots (approximately 200 hours
of videos).
In addition, a keyframe, which is the single video
frame image, is assigned in a shot. In our experi-
Object Detection Oriented Feature Pooling for Video Semantic Indexing
47

Figure 4: Example of creating feature vectors by aspect ratio pooling.
ments, we used these keyframes to judge whether or
not targets exists in a video.
4.2 Evaluation Criteria
We used the same evaluation criterion as one used in
TRECVID’s SIN task benchmark, namely, the aver-
age precision (AP). The AP of each category is de-
fined as
AP =
1
N
(te)
pos
N
(te)
∑
r=1
P
r
· Rel
r
, (3)
where N
(te)
denotes the number of test shots, N
(te)
pos
,
the number of positive test shots, and r, the rank in the
ordered list of results retrieved from N
(te)
shots. P
r
is
defined as the precision computed at the r-th rank and
Rel
r
takes the value 1 or 0, representing relevant or
irrelevant, respectively. Finally, the developed system
is evaluated using the mean AP (mAP): the AP scores
averaged across all categories.
At TRECVID 2014, the participants evaluated
the entire testing set (106,913 shots), outputted their
scores for each category, and submitted ranked lists of
the top 2,000 shots for each of 60 categories. Finally,
30 of 60 categories were evaluated using the mAP. In
our experiments, this truth judgement of 30 categories
was used to compare the performance.
4.3 Experimental Conditions
For object detector, we utilized the python implemen-
tation of Faster R-CNN, and the pre-trained Zeiler and
Fergus (ZF) model (Zeiler and Fergus, 2013).
To train SVMs, provided collaborative annota-
tions (Ayache and Qu´enot, 2008) (Blanc-Talon et al.,
2012) are used. The number of positive shots for
each category was approximately 1,750 on average,
whereas the number of negative shots was much
larger. Therefore, negative shots were randomly sub-
sampled such that the number of positive and negative
shots would be 30,000 in total.
After obtaining SVM scores, a re-scoring method,
which is called video-clip score (N. Inoue and Shin-
oda, 2015), was carried out both for the CNN based
and the Faster R-CNN based methods to improve the
video indexing performance. Specifically, shot scores
s
j
( j = 1, 2, ··· , n) of a video that consists of n shots is
re-computed as
ˆs
j
= (1− p)s
j
+ ps
max
, (4)
where
s
max
= max
j
s
j
, (5)
p is the probability of the occurrence of a target cate-
gory in a video:
p = γ
#(positive shots in a video)
#(shots in a video)
, (6)
and γ is a parameter to balance the original score and
the maximum score in a video. The final score ˆs
j
would be close to s
max
when the target appears fre-
quently in a video.
For system fusion, we set α = 0.5 in (1) such that
both the CNN and the Faster R-CNN based methods
have the same weight. Because there are four models
(features are pooled in a entire image and three divi-
sions), we set β = 0.25 such that all the models have
the same weight. As for the parameter of video-clip
scores, we set γ = 0.8, which was selected by our pre-
liminary experiment.
4.4 Experimental Results
Table 2 shows the APs and the mAPs for both the
CNN based method and the fusion of two feature ex-
traction methods. These results show that the CNN
based and object detector based feature extraction
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
48
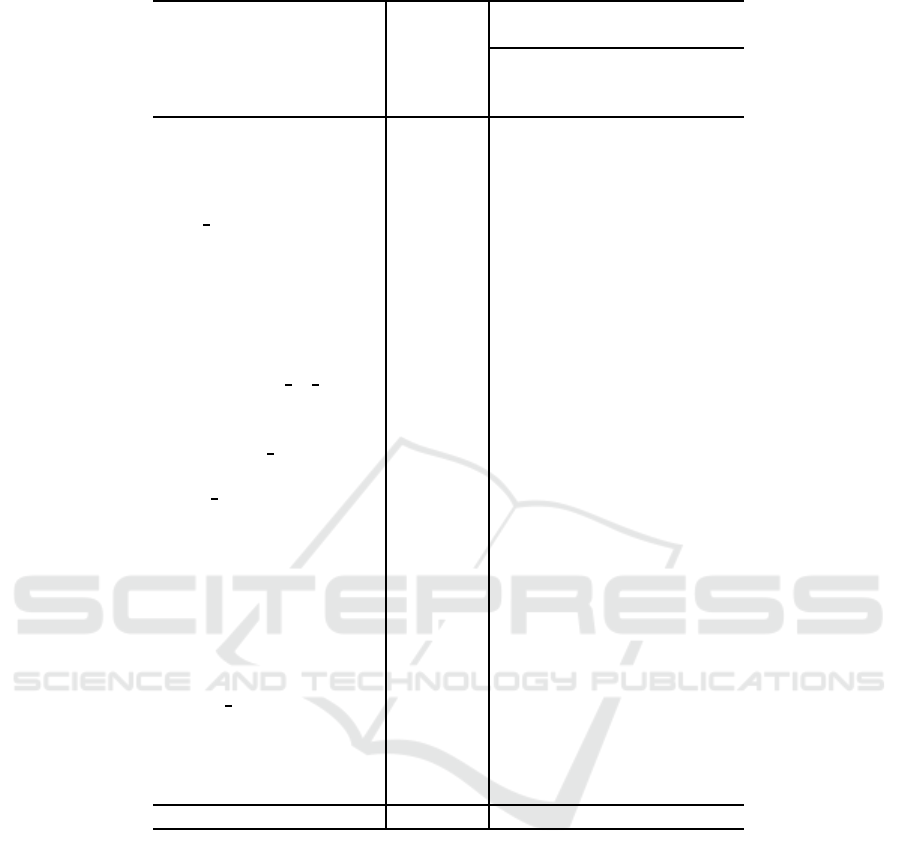
Table 2: Average precision for the CNN feature extraction and the combination of CNN and Faster R-CNN.
Fusion of
CNN
CNN and Faster R-CNN
Detection target
(baseline) Spatial Size
Aspect
pooling pooling
ratio
pooling
Airplane 23.75 24.40 24.42 24.24
Basketball 4.50 6.02 5.94 5.84
Beach
52.58 54.93 54.95 55.06
Bicycling 14.03 18.76 19.19 18.86
Boat
Ship 21.45 22.57 23.06 22.72
Bridges 5.30 8.75 8.77 8.87
Bus
2.63 4.50 4.39 4.42
Chair 20.32 28.64 28.39 28.25
Cheering
12.58 12.98 12.91 12.80
Classroom 10.50 16.49 16.72 16.81
Computers
25.90 33.71 33.80 33.65
Demonstration Or Protest 30.55 33.42 32.75 33.21
Hand
2.25 2.85 3.04 2.88
Highway 37.67 38.09 38.63 38.31
Instrumental Musician 43.32 41.40 42.03 41.68
Motorcycle
28.66 35.63 36.03 35.71
News Studio 72.72 73.06 72.97 73.09
Nighttime
22.72 26.23 26.50 26.32
Running 8.75 10.43 10.47 10.42
Singing
14.41 13.98 14.05 14.09
Stadium 25.71 27.28 27.30 27.67
Telephones
3.60 6.01 5.92 6.14
Baby 7.01 7.72 8.20 7.80
Flags
21.84 22.34 21.95 22.29
Forest 28.16 28.50 29.06 29.10
George
Bush 55.60 58.47 59.04 58.77
Lakes 9.15 8.75 8.64 8.51
Oceans
48.66 49.08 48.92 48.69
Quadruped 16.98 24.48 24.32 24.34
Skier
18.95 26.88 26.71 27.21
mAP 23.00 25.55 25.64 25.59
methods are complementary and the fusion of these
helps improve the performance of video semantic in-
dexing. Especially, categories that achieve high im-
provement rate by proposed method are closely re-
lated to categories of object detectors, namely 20 ob-
ject classes of Pascal VOC as shown in Table 1. The
followings are the examples:
• Chair (TRECVID) ↔ chair (Pascal VOC),
• Motorcycle (TRECVID) ↔ motorbike (Pascal
VOC),
• Quadruped (TRECVID) ↔ cat / cow / dog / horse
/ sheep (Pascal VOC).
We carried out three types of pooling methods in our
experiments. However, there is no significant differ-
ence in these three methods. This result shows that
the Faster R-CNN based method could eliminate the
redundantbackgroundinformation and effectively ex-
tract features even from the small object region, while
the information about the position, the size and the as-
pect ratio of objects did not contribute a lot to find the
target categories.
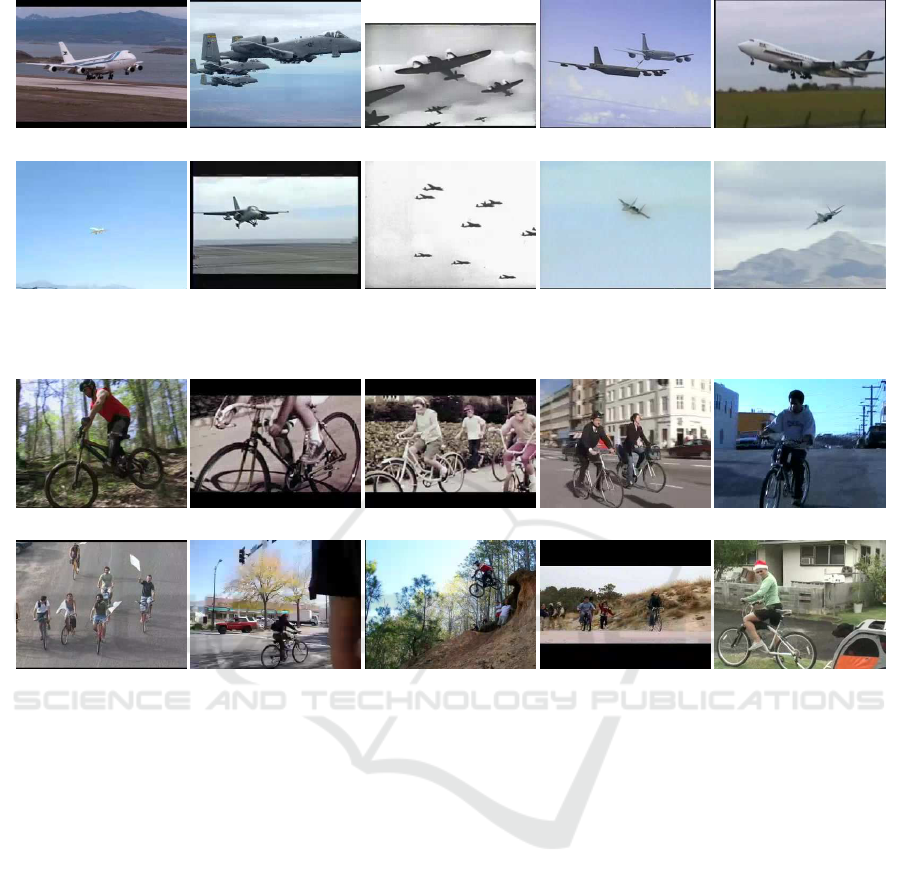
To investigate the difference between the CNN
and the Faster R-CNN based methods, we looked at
images in the higher ranks for each method. CNN
used in the experiments was trained with ImageNet
dataset, and mostly single object is located in the cen-
ter of images in the ImageNet dataset. For this reason,
in the higher ranks using the CNN based method, tar-
get objects tended to be large and located in the center
of images. On the other hand, in the higher ranks us-
ing the Faster R-CNN based method, there were not
Object Detection Oriented Feature Pooling for Video Semantic Indexing
49
Feature extraction with the CNN based method
Feature extraction with the Faster R-CNN based method (Size pooling)
Figure 5: Typical example images of “Airplane” in the higher ranks.
Feature extraction with the CNN based method
Feature extraction with the Faster R-CNN based method (Size pooling)
Figure 6: Typical example images of “Bicycling” in the higher ranks.
only one object but also multiple object in an image,
and those objects were relatively small. Typical ex-
ample images are shown in Fig. 5 and 6.
5 SUMMARY AND FUTURE
WORKS
We attempted to exploit the object detector as feature
extraction to reduce the useless information derived
from redundant background and complement with
conventional CNN based feature extraction. Our ex-
periments showed that object detection oriented fea-
ture extractor successfully compensates for the in-
formation loss by the CNN based method and con-
tributed to the improvement for the video semantic
indexing. The improvement rate was high for cate-
gories that were related to object detector, and so we
plan to create the extensive object detector that can
detect various kinds of objects, i.e. increase the num-
ber of object categories. Another future work is to
effectively use multiple frames in a video instead of
using a single keyframe. These information enhance-
ment methods are expected to lead to enhanced visual
representation power by being able to treat the com-
bination of multiple objects in a video.
ACKNOWLEDGEMENTS
This work was partially supported by JSPS KAK-
ENHI Grant Number 15K00249 and Waseda Univer-
sity Grant for Special Research Projects 2016A-026.
REFERENCES
Ayache, S. and Qu´enot, G. (2008). Video corpus annotation
using active learning. In 30h European Conference on
Information Retrieval (ECIRf08), pages 187–198.
Blanc-Talon, J., Philips, W., Popescu, D. C., Scheunders, P.,
and Zemc´ık, P. (2012). Advanced concepts for intelli-
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
50

gent vision systems. In Proceedings of 14th Interna-
tional Conference, ACIVS 2012.
Csurka, G., Bray, C., Dance, C., and Fan, L. (2004). Visual
categorization with bags of keypoints. In Proceedings
of ECCV Workshop on Statistical Learning in Com-
puter Vision, pages 1–22.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In Proceedings of IEEE
Conference on Computer Vision and Pattern Recogni-
tion, volume 1, pages 886–893.
Everingham, M., Van Gool, L., Williams, C. K. I., Winn, J.,
and Zisserman, A. (2010). The PASCAL Visual Ob-
ject Classes (VOC) challenge. International Journal
of Computer Vision, 88(2):303–338.
Lowe, D. G. (1999). Object recognition from local scale in-
variant features. In Proceedings of IEEE International
Conference on Computer Vision, pages 1150–1157.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Mikolajczyk, K. and Schmid, C. (2004). Scale & affine in-
variant interest point detectors. International Journal
of Computer Vision, 60(1):63–86.
N. Inoue, T. H. Dang, R. Y. and Shinoda, K. (2015). Toky-
oTech at TRECVID 2015. In TRECVID 2015.
Ojala, T., Pietik¨ainen, M., and Harwood, D. (1994). Perfor-
mance evaluation of texture measures with classifica-
tion based on kullback discrimination of distributions.
In Proceedings of the IAPR International Conference,
volume 1, pages 582–585.
Over, P., Awad, G., Michel, M., Fiscus, J., Kraaij, W.,
Smeaton, A. F., Qu´enot, G., and Ordelman, R. (2015).
TRECVID 2015 – An overview of the goals, tasks,
data, evaluation mechanisms and metrics. In Proceed-
ings of TRECVID 2015. NIST, USA.
Ren, S., He, K., Girshick, R. B., and Sun, J. (2015). Faster
R-CNN: Towards real-time object detection with re-
gion proposal networks. CoRR, abs/1506.01497.
Russakovsky, O., Deng, J., Su, H., Krause, J., Satheesh,
S., Ma, S., Huang, Z., Karpathy, A., Khosla, A.,
Bernstein, M., Berg, A. C., and Fei-Fei, L. (2015).
ImageNet Large Scale Visual Recognition Challenge.
International Journal of Computer Vision (IJCV),
115(3):211–252.
S´anchez, J., Perronnin, F., Mensink, T., and Verbeek, J.
(2013). Image Classification with the Fisher Vector:
Theory and practice. International Journal of Com-
puter Vision, 105(3):222–245.
Schmid, C. (2006). Beyond bags of features: Spatial
pyramid matching for recognizing natural scene cat-
egories. In Proceedings of CVPR 2006, pages 2169–
2178.
Simonyan, K. and Zisserman, A. (2014). Very deep con-
volutional networks for large-scale image recognition.
CoRR, abs/1409.1556.
Smeaton, A. F., Over, P., and Kraaij, W. (2006). Evaluation
campaigns and TRECVid. In MIR ’06: Proceedings
of the 8th ACM International Workshop on Multime-
dia Information Retrieval, pages 321–330, New York,
NY, USA. ACM Press.
Snoek, C. G. M., Cappallo, S., van Gemert, J., Habibian,
A., Mensink, T., Mettes, P., Tao, R., Koelma, D. C.,
and Smeulders, A. W. M. (2015). Qualcomm Re-
search and University of Amsterdam at TRECVID
2015: Recognizing Concepts, Objects, and Events in
Video. In TRECVID 2015.
Szegedy, C., Liu, W., Jia, Y., Sermanet, P., Reed, S. E.,
Anguelov, D., Erhan, D., Vanhoucke, V., and Rabi-
novich, A. (2014). Going deeper with convolutions.
CoRR, abs/1409.4842.
Ueki, K. and Kobayashi, T. (2015). Waseda at TRECVID
2015: Semantic Indexing. In TRECVID 2015.
Varma, M. and Ray, D. (2007). Learning the discrimina-
tive power-invariance trade-off. In Proceedings of the
IEEE International Conference on Computer Vision,
Rio de Janeiro, Brazil.
Zeiler, M. D. and Fergus, R. (2013). Visualizing
and understanding convolutional networks. CoRR,
abs/1311.2901.
Object Detection Oriented Feature Pooling for Video Semantic Indexing
51
