
Segmentation-based Multi-scale Edge Extraction to Measure the
Persistence of Features in Unorganized Point Clouds
Dena Bazazian, Josep R. Casas and Javier Ruiz-Hidalgo
Signal Theory and Communications Department, Universitat Polit
`
ecnica de Catalunya, Barcelona, Spain
Keywords:
Edge extraction, Multi-scale, Segmentation, Unorganized Point Cloud.
Abstract:
Edge extraction has attracted a lot of attention in computer vision. The accuracy of extracting edges in point
clouds can be a significant asset for a variety of engineering scenarios. To address these issues, we propose a
segmentation-based multi-scale edge extraction technique. In this approach, different regions of a point cloud
are segmented by a global analysis according to the geodesic distance. Afterwards, a multi-scale operator is
defined according to local neighborhoods. Thereupon, by applying this operator at multiple scales of the point
cloud, the persistence of features is determined. We illustrate the proposed method by computing a feature
weight that measures the likelihood of a point to be an edge, then detects the edge points based on that value
at both global and local scales. Moreover, we evaluate quantitatively and qualitatively our method. Experi-
mental results show that the proposed approach achieves a superior accuracy. Furthermore, we demonstrate
the robustness of our approach in noisier real-world datasets.
1 INTRODUCTION
The computer vision community has drawn attention
to 3D scene analysis in recent years, with data
captured with stereo and multi-camera systems, and
especially after the success of commercial depth
sensors, such as MS Kinect or Asus Xtion. The data
acquired by these devices, however, may contain
noise, outliers and, even if the projected points are
uniformly distributed on the image (at the pixel
level), the distribution tends to be highly non-uniform
in the 3D point cloud. The situation becomes more
complicated since the point clouds are unorganized:
the points in the cloud are not initially connected,
and information about surface normals has to be
computed with a certain amount of uncertainty. For
these reasons, the shape analysis of the measured
data-set becomes highly challenging in computer
graphics and computer vision.
Our research deals with the edge extraction problem
in surfaces represented by point clouds. Estimating
and identifying edges enables a better understanding
of the structural features of the underlying surfaces.
An edge is formed when two surfaces, which we may
approximate by planes, with sufficiently different
orientation meet. Hence, the planes defined by
normal vectors of the surrounding points should be
estimated in order to determine an edge point. A
region of contiguous edge points is then defined
as an edge region in the surface represented by the
unorganized cloud.
Edge extraction identifies crucial characteristics
of the underlying geometry. It can be used to detect
feature points, and improves the performance of
geometry processing such as adaptive sampling,
segmentation, detection and scene analysis.
For edge extraction techniques, multi-scale schemes
improve noise sensitivity and add robustness against
the scale dependency of features. The rationale
behind this is to get an optimal scale for each point in
order to analyze the intrinsic structure around it.
In our approach, we segment the surface to explore
global classification of edges and feature points.
One of the aspects of the multi-scale analysis is to
cope with false feature measurements arising from
the fact that part of the surface intersects the local
neighborhood.
The main contributions of this paper are the fol-
lowing. First, we put forward a new classification
framework that allows for discrete surface analysis at
multiple scales. Second, we propose an optimal edge
extraction technique by considering a segmentation
of the surface in order to obtain a multi-scale descrip-
tion of edges in the point cloud. Third, we improve
the accuracy of the edge extraction technique in
Bazazian D., R. Casas J. and Ruiz-Hidalgo J.
Segmentation-based Multi-scale Edge Extraction to Measure the Persistence of Features in Unorganized Point Clouds.
DOI: 10.5220/0006092503170325
In Proceedings of the 12th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2017), pages 317-325
ISBN: 978-989-758-225-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
317

unorganized point clouds.
The remainder of the article is organized as follows.
Section 2 presents related work, followed by a de-
scription of our approach and architecture in Section
3. Section 4 reports the experimental results of our
approach, and conclusions are drawn in section 5.
2 RELATED WORK
The state of the art for edge extraction in point clouds
is summarized below. We group the various contri-
butions according to the different aspects of the prob-
lem: extraction of sharp features, estimation of nor-
mals, segmentation and multi-scale approaches.
2.1 Sharp Feature Extraction
Robust statistics have been exploited to extract sharp
features (Fleischman et al., 2005; Daniels et al., 2008;
Oztireli et al., 2009). A technique for edge detection
for the registration of point clouds was introduced by
Choi (Choi et al., 2013). Other authors have explored
just the detection of edge points (Sidiropoulos and
Lakakis, 2016) or the segmentation of larger geomet-
ric structures such as surfaces (Demarsin et al., 2007;
Xu et al., 2015), lines (Lin et al., 2015) and, more re-
cently, contour detectors based on classifiers (Hackel
et al., 2016) have also been proposed.
In unorganized point clouds, the geometry defined
by the neighborhood of a point is almost the only
available information to extract features from. In this
line, several authors (Weber et al., 2010; Weber et al.,
2012; Gumhold et al., 2001; Feng et al., 2014) pro-
pose a region growing method that decomposes the
point cloud into clusters, and identifies the regions
with sharp features based on the analysis of the nor-
mals. In these approaches, extracting sharp edge fea-
tures from a 3D point cloud requires the computation
of accurate normals from the neighborhood to gener-
ate high quality surfaces. This brings up the problem
of normal estimation, which is closely related to sharp
feature extraction, as we will discuss next.
2.2 Normal Estimation
Regression based estimation was first proposed by
Hoppe (Hoppe et al., 1992). For each point in the
cloud, a least squares local plane is fitted to its k near-
est neighbors using PCA. The normal at each point is
the eigenvector corresponding to the smallest eigen-
value of the covariance matrix (Lange and K., 2005).
By assigning Gaussian weights to the neighbors of
each point, Pauly and Gross (Pauly et al., 2003b;
Gross and Pfister, 2007) proposed a weighted version
of this basic approach. For noisy point clouds, Mi-
tra (Mitra and Nguyen, 2003) suggested an adaptive
neighborhood size based on local properties, such as
noise scale, curvature and sampling density. A sim-
ilar motivation led Wang (Wang and Feng, 2015) to
propose an algorithm to develop a normal estimation
method that rejects neighborhood outliers.
2.3 Segmentation
Various algorithms have been proposed for point
cloud segmentation as an indirect approach to extract
edges. Some methods are based on the surface such
as those by Zhang and Reisner (Zhang et al., 2013;
Reisner-Kollmann and Maierhofer, 2012), which at-
tempt to find sets of points in the scene that fit planes
and primitives. Moreover, Rabbani and Son (Rabbani
et al., 2006; Son and Kim, 2013) proposed a graph
based method which do not constrain users to model-
ing with primitives. In addition, Liu (Liu and Youlun,
2008) proposed a mapping of the normal of a point
cloud into a Gaussian sphere, producing a Gaussian
image; afterwards this spherical image can be clus-
tered to identify shapes. Furthermore, Kustra (Kus-
tra et al., 2014) proposed to find the most probable
local quasi-flat surface patches passing through each
point by using a clustering approach, and then merg-
ing these patches to classify the input points into man-
ifolds or noise.
2.4 Multi-scale
Defining a proper neighborhood for each point in the
cloud raises the question of finding the right scale fac-
tor. Scale in computer vision has always been of ex-
treme importance, more so with true space 3D data
as in point clouds. It constitutes a limiting factor in
the automatic estimation of a point feature represen-
tation. Pauly (Pauly et al., 2003a) proposes a surface
variation method based on PCA at multiple scales,
and evaluates the likelihood of a point belonging to
a feature. Instead of surface variation, Ho (Ho and
Gibbines, 2009) adopts the rotation and translation
invariant local surface measure as a local geometric
property to compute the feature confidence value and
suitable scales. In addition, according to the signifi-
cance of the normals in the point cloud, the authors
in (Ioannou et al., 2015) proposed a multi-scale ap-
proach by computing the difference of normals. Fur-
thermore, to overcome the complexity of the noise in
the point cloud, Park (Park et al., 2012) proposes an-
other multi-scale technique based on tensor voting for
point clouds that contain random noise.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
318

Figure 1: (a) The difference of normals (Ioannou et al.,
2015), and (b) the difference of surface variation (Pauly
et al., 2003a), illustrated with a jet-color map.
2.5 Our Contribution
Our goal is to analyze the persistence of a selected
unique segment by using different distances over mul-
tiple scales. The method we propose is designed to
extract edges in unorganized point clouds reliably and
accurately. In our work, we consider the segmenta-
tion method of Kustra (Kustra et al., 2014) in order to
explore a global classification. Our contribution is a
new classification framework by segmentation which
allows for discrete surface analysis at multiple scales
with the purpose of improving the accuracy of edge
extraction. The advantage of this approach is to cope
with false feature measurements when another surface
intersects the local neighborhood.
3 PROPOSED APPROACH
The following two subsections describe our pro-
posal. We present the motivation and the general
idea next, and then discuss the main technique for
the segmentation-based multi-scale edge extraction,
which is depicted in Algorithm 1.
3.1 Motivation and General Idea
We define a multi-scale operator based on the differ-
ence of normals according to Ioannou (Ioannou et al.,
2015) by using the estimated surface normal map of
a point cloud. Figure 1 (a) shows the difference of
normals when estimated for two different neighbor-
hood sizes. In order to measure the persistence of a
feature over all scales, we compute the surface vari-
ation (Pauly et al., 2003a) for each point at different
scales, as shown in Figure 1 (b).
If the structure of the larger neighborhood around a
center point is significantly different from that of a
smaller neighborhood, then the direction of the two
estimated normals is likely to vary by a large amount.
In that case, a value between the two radii is often a
representative of the scale near the center point. We
illustrate how the difference of normals behaves for a
variety of neighborhood sizes in Figure 2.
Figure 2: The difference of normals computed for a series
of radii couples, illustrated with a jet-color map.
When increasing the values of the scale parameter, the
computed difference of normals may be unreliable in
case that a foreign surface intersects the local neigh-
borhood. In order to cope with this issue, we consider
Kustra’s global classification technique (Kustra et al.,
2014). As shown in Figure 3, it is possible to segment
the surface in order to obtain a global analysis of the
point cloud.
When the local analysis neighborhood in the point
cloud is defined by Euclidean distance, part of a for-
eign surface may be considered in the local neighbor-
hood. For instance, for a sample point located on the
bunny’s ear, some neighbors at large scales may come
from other surfaces, as shown in Figure 4 (a). In or-
der to overcome this drawback, we propose to replace
the Euclidean by geodesic distance, as shown in Fig-
ure 4 (b). This approach also allows the global classi-
fication of the whole point cloud considering the dif-
ferent patches of the segmentation, as shown in Fig-
ure 4 (c).
3.2 Overview of Our Algorithm
Our main objective is to face the challenge in edge
extraction related to varying neighborhood sizes for
multi-scale analysis and, in particular, to avoid con-
sidering foreign surface patches in the local neighbor-
hoods. We consider three steps in the proposed strat-
egy: first, we segment the point cloud into different
patches in order to avoid considering non-local points
in the neighborhood; second, we propose a multi-
scale operator to explore the scale of each segment;
third, we extract edges according to the appropriate
neighbor size of each segment. The details of the pro-
posed technique are explained next and presented in
Algorithm 1.
3.2.1 Segmentation
The first step in our algorithm is the global segmenta-
tion of the point cloud. We use the technique pro-
posed in (Kustra et al., 2014), which considers the
global connectivity structure of the point cloud. Ac-
cording to Kustra’s method, we first cluster the Gauss
map of the neighborhood by using the geodesic dis-
tance on the Gaussian sphere between the normals of
the map. Then, we extract the curved manifolds from
Segmentation-based Multi-scale Edge Extraction to Measure the Persistence of Features in Unorganized Point Clouds
319

Figure 3: Extracting manifolds from the point cloud (Kustra
et al., 2014).
the patch connectivity graph via a multiple-source
flood fill. Segmentation results look like shown in
Figs. 3 and 4 (c).
3.2.2 Multi-scale
In order to find out the adaptive neighborhood size on
the point cloud we consider a multi-scale method ac-
cording to the size of each segment. First, the area of
each segment in the point cloud is calculated accord-
ing to the position of the associated points in the 3D
Cartesian coordinate system. Afterwards, we explore
the adaptive scale by considering an iterative proce-
dure for each segment. We start from a small scale
such as 0.1 times the area (this value was a propor-
tionate scale in our experiments with various shapes).
Then, we compute the probability of being an edge
for each sample point according to the surface varia-
tion method (Pauly et al., 2003a), which is based on
the eigenvalues of the covariance matrix. The surface
variation σ
n
(p
i
) at point p
i
with neighbor size of n is
defined as:
σ
n
(p
i
) =
λ
0
λ
0
+ λ
1
+ λ
2
(1)
where λ
0
, λ
1
and λ
2
are the eigenvalues of the covari-
ance matrix of p
i
and λ
0
≤ λ
1
≤ λ
2
.
The surface variation σ
n
(p
i
) for each sample point
p
i
allows to distinguish the points belonging to a flat
surface from those belonging to an edge in the point
cloud. Since the smallest eigenvalue of the covari-
ance matrix for flat surfaces is zero, then the value of
the surface variation for flat surfaces would also be
zero. Accordingly, we define the probability of being
an edge as:
P(p
i
) =
σ
n
(p
i
)
Θ
n
(S)
, (2)
where P(p
i
) is the probability of being an edge for the
sample point p
i
in the considered segment, and σ
n
(p
i
)
is the surface variation of p
i
. The value Θ
n
(S) in the
denominator stands for the largest surface variation
for the running segment of the point cloud. Thus, if
the surface variation is zero, then that sample point is
definitely not an edge. The larger the surface varia-
tion, the higher the probability of that sample point
Figure 4: Estimating the neighbors of a sample point on the
ear of bunny at large scales: (a) far away neighbors may be-
long to foreign surfaces when Euclidean distance is used;
(b) geodesic distance is a better choice to explore large lo-
cal neighborhoods; (c) the point cloud can be segmented to
distinguish different surfaces.
being an edge. This procedure is then repeated at pro-
gressively larger scales of the running segment, in or-
der to measure the persistence of the p
i
’s feature ac-
cording to the probability variation, as described in
Algorithm 1- procedure 2.
3.2.3 Edge Extraction
As a last step, we extract edges according to the fast
technique proposed in (Bazazian et al., 2015), which
is also robust for edges in very small dihedral an-
gles. Bazazian’s edge extraction technique analyzes
the variation of eigenvalues of the covariance ma-
trix (via the surface variation parameter); afterwards,
the points with zero or almost zero surface variation
are considered as non-edge points. Instead of con-
sidering a single scale for whole the point cloud as
in (Bazazian et al., 2015), we are able to improve the
fast and robust edge extraction by defining an appro-
priate local scale for each segment of the point cloud
via our multi-scale approach.
4 EXPERIMENTAL RESULTS
We performed experiments with synthetic point
cloud geometries, as those in Figure 3 and 10, and
classical point cloud models, as those in Figure 5.
Synthetic geometries allow estimating the accuracy
of the algorithm according to a known ground-truth.
Figure 5 displays progressive iterations in the esti-
mation of an adaptive scale for the three point cloud
models of Bunny, Buddha and Dragon.
In order to explore the appropriate neighborhood
size, we describe the application to the Bunny model.
To this end, first we segment the point cloud into the
four patches. Next, according to the iterations which
have been explained in section 3.2, we explore the
best adaptive scale to extract the edges in the point
cloud. The appropriate neighborhood size for each
segment will depend on its area. Figure 6 illustrates
the variation of neighborhood sizes of each Bunny’s
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
320

Figure 5: Iteration of Extracting Edges for the point clouds of Bunny, Buddha and Dragon.
segment at each iteration. In this plot we show
the average number of points which are included
in each radius surrounded by a sample point. The
plot demonstrates the sensitivity of determining the
neighborhood size for small segments of a point
cloud, which leads to considering almost all the
points of the segment as neighborhood points.
Moreover, Figure 7 illustrates how the different
Bunny segments behave differently for edge de-
tection with varying neighborhood sizes. We can
observe that when increasing the size of the neighbor-
hood, the number of extracted edge points increases
in all the segments. The figure shows also that at
some neighborhood sizes, such as for instance 0.95,
there is a larger probability of false positives for
small segments than for large segments. This also
proves the need of the multi-scale approach, as edge
detection with the same neighborhood size for all
the segments of a point cloud (which have different
actual scales) is prone to error. Hence, we propose
to define the neighborhood size for each segment
proportional to its scale, in order to get more precise
results of edge extraction.
For the comparison of the percentage of edge points,
we have estimated the probability of being an edge
depending on the various segments of Bunny across
the various scales. The probability of being an edge is
computed according to the fluctuations of the surface
variation at each segment. As shown in Figure 11,
for those segments with small area (ear and head) at
large scales (neighbor size 1.35 or 1.50), edge points
are either undetected or just very few are detected.
Almost all points of small area segments are detected
as edge points at large scales. In these plots we
demonstrate the different behavior of the variation of
neighborhood sizes according to the various segments
of a single shape. We illustrate that considering an
appropriate neighbor size for each segment of a point
cloud is essential for edge detection.
For the quantitative evaluation of the proposed
algorithm, we perform experiments with artificial
geometric point clouds such as the intersection of
three planes in Figure 3 (left). In this point cloud
each plane is considered as a single segment of unit
area. In Figure 8 we show ten iterations for exploring
the adaptive scale for this surface, by computing the
F1-score defined as:
F
1
= 2 ×
Precision × Recall
Precision + Recall
(3)
where Relevant is defined as the points which are la-
beled as ground-truth, whereas Precision is defined
as how many selected points are relevant and Recall
is defined as how many relevant points are selected.
Precision and Recall are computed as:
Precision =
T P
T P + FP
Recall =
T P
T P + FN
(4)
where T P stands for True Positives representing the
number of correctly detected points, FP stands for
Segmentation-based Multi-scale Edge Extraction to Measure the Persistence of Features in Unorganized Point Clouds
321

Algorithm 1: Segmentation-based Multi-Scale Edge Ex-
traction.
1: procedure 1: SEGMENTATION
2: Input: A point cloud C which samples a surface S ⊂ R
3
3: Output: A set of segment manifolds S of C
4: for all points v ∈ C do
5: Estimate the normals at v, call them n
v
6: end for
7: Create a graph G = (V,E) with V = C and initially
E :=
/
0
8: for all v ∈ C do
9: for all w ∈ C such that v and w are neighbors in
S do
10: compute the angle between ∠n
v
,n
w
11: if ∠n
v
,n
w
≤ T for some threshold value T
then
12: E := E ∪{v, w}
13: end if
14: end for
15: end for
16: Explore a flood-filling over the patch connectivity
stored in G and compute segments S
17: end procedure1
18: procedure 2: MULTISCALE
19: Input: A segment S ∈ S
20: Output: The adaptive scale (neighborhood size) N
S
21: area
S
:= area of S, N
S
:= 0, p
0
S
:= 0, ∆ := 1000
22: for i = 1 to 10 do
23: Let N
i
S
:= (0.1 ∗ area
S
) + (i ∗ 2 ∗ (area
S
/100))
24: p
i
S
:= the probability of being an edge in C at
level N
i
S
computed according to the surface variation
25: Compute persistence: ∆
i
:= p
i
S
− p
i−1
S
26: if ∆
i
≤ ∆ then
27: ∆ := ∆
i
, N
S
:= N
i
S
28: end if
29: end for
30: Return N
S
31: end procedure2
32: procedure 3: EDGE EXTRACTION
33: Input: A segment S ∈ S and N
S
34: Output: set of edge points F of S
35: F :=
/
0
36: for each sample point P ∈ S do
37: Compute the surface variation V
P
at P at scale
N
S
38: if V
P
≥ T
0
for some threshold value T
0
then
39: F := F ∪ {P}
40: end if
41: end for
42: end procedure3
False Positives representing the number of wrongly
detected points, FN stands for False Negatives, rep-
resenting the number of false rejections, i.e. points
that belong to the ground truth but are not detected
by the edge extraction technique.
Furthermore, to prove the robustness contributed by
the segmentation step to the edge extraction process,
we have compared our technique with the method
in (Bazazian et al., 2015). To this end, we consider
Table 1: Comparing the accuracy of edge extraction for the
Multiple-Tetrahedron figure with segmentation (our pro-
posed algorithm) and without segmentation (the technique
of (Bazazian et al., 2015)).
Multiple Tetrahedron Precision Recall F1-Score
With Segmentation 0.786 0.825 0.805
Without Segmentation 0.651 0.842 0.734
an unorganized point cloud which is a Multiple-
Tetrahedron, as shown in Figure 10. We propose this
shape for two reasons: first, as a synthetic shape, the
ground-truth of edge points is available. Second, it
comprises 4 different tetrahedrons of different surface
sizes, to demonstrate the advantage of the segmen-
tation approach on the different sizes of each segment.
Table 2: Evaluating the accuracy of edge extraction for the
Multiple-Tetrahedron model perturbed with 10% additive
Gaussian noise. Our proposed method refers to the line
where calls with segmentation, whereas the method pro-
posed in (Bazazian et al., 2015) is called by without seg-
mentation.
Multiple Tetrahedron with Noise Precision Recall F1-Score
With Segmentation 0.476 0.824 0.603
Without Segmentation 0.405 0.826 0.543
Table 1 shows the F1-score: we compare the accu-
racy of our proposed technique (which is by segmen-
tation) with the technique of (Bazazian et al., 2015)
(which is without segmentation). We demonstrate that
performing segmentation as a pre-process of the edge
extraction yields to higher accuracy. By segmenting
the point cloud into different patches, we avoid tak-
ing non-local neighbors into account. In addition, by
considering an appropriate scale for each segment of a
point cloud, we eliminate false positive results which
are due to the scale incompatibility. As shown in Ta-
ble 1, by employing segmentation as a prerequisite of
edge extraction process we obtain a higher accuracy.
Moreover, in order to examine the robustness of our
proposed method to noisier real-world datasets, we
show the results for noisy models perturbed with addi-
tive 10% Gaussian noise. As it is shown qualitatively
in Figure 9 the edges are extracted accurately, al-
though there are noisy points surrounding the Bunny.
Thus, the results in this case are almost the same as in
the model without noise. Furthermore, to verify the
results quantitatively, we have added 10% Gaussian
noise to the Multiple-Tetrahedron and computed the
accuracy. We have evaluated our proposed method
using the F1-score. In Table 2 it is shown that even
when adding noise the accuracy of edge extraction
with segmentation is higher than without segmenta-
tion.
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
322
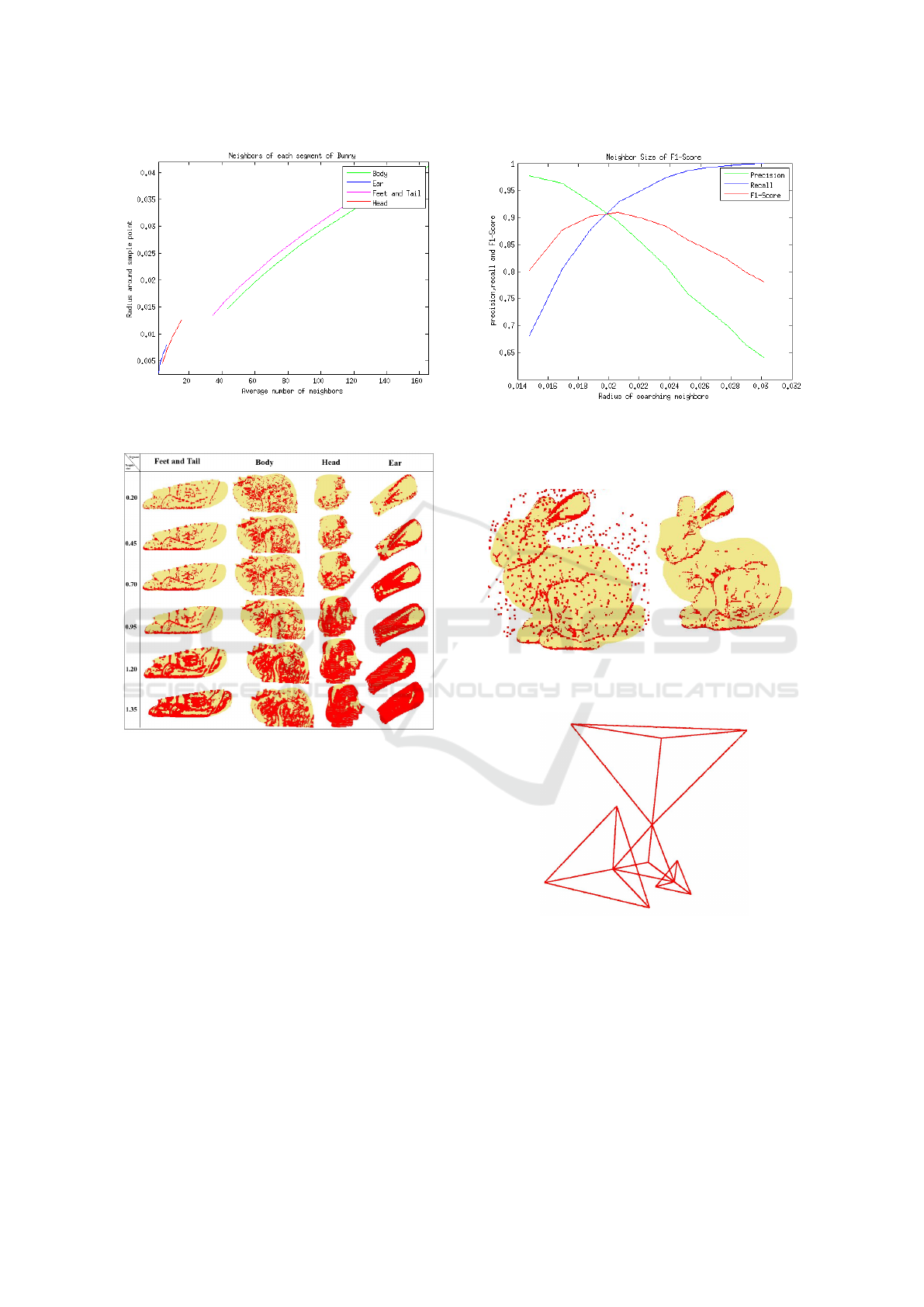
Figure 6: Plot of the Average of the area and number of
neighbors for each segment of the Bunny.
Figure 7: The different segments of Bunny behave dif-
ferently for edge extraction with progressive neighborhood
sizes.
5 CONCLUSION
In this paper we have presented a segmentation-based
technique for multi-scale edge extraction. We have
focused on the challenge of edge detection when for-
eign surfaces get into local analysis neighborhoods.
A global segmentation based on geodesic distance al-
lows segmenting different regions of a point cloud.
This allows exploring the best scale for each segment
and improves the accuracy of edge extraction.
We have illustrated the importance of determining the
best scale as a prerequisite for the edge extraction pro-
cess. Consequently, we propose a multi-scale tech-
nique that finds the appropriate neighborhood size for
the analysis, instead of setting a single scale for whole
the point cloud. This is the basis for the superior accu-
racy of the proposed method in the quantitative eval-
Figure 8: Comparison of the F1-Score for the various neigh-
borhood sizes in order to explore the adaptive scale for a
segment of the point cloud corresponding to the intersec-
tion of 3 planes.
Figure 9: Comparing the Edge Extraction technique of
Bunny with Gaussian Noise and without noise.
Figure 10: The geometric shape of Multiple-Tetrahedron.
uation results we present.
We have also proven that the segmentation of the
point cloud, makes feasible to define the scale of
each segment before finding the optimal neighbor-
hood size. This eliminates false positives due either
to the incompatibility of neighborhood sizes and seg-
ment scales or non-local neighbors. Accordingly, it
yields an improved precision in edge detection.
We have quantitatively compared the accuracy of re-
Segmentation-based Multi-scale Edge Extraction to Measure the Persistence of Features in Unorganized Point Clouds
323
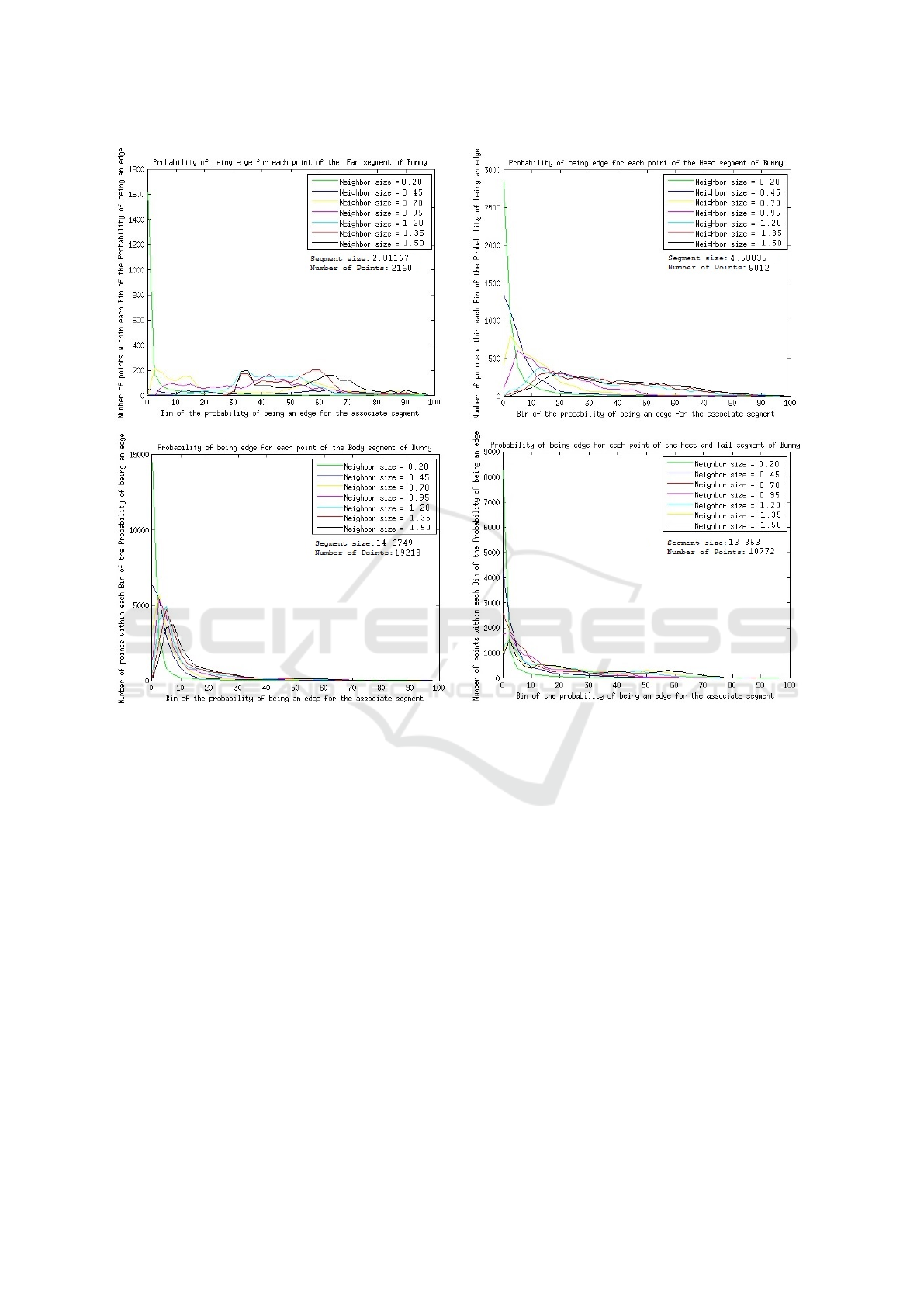
Figure 11: Probability of being an edge according to the various segments of the Bunny over various scales.
sults in the analysis of synthetic objects for which
we do have ground truth. Furthermore, by adding
Gaussian noise to the artificial point clouds, we have
demonstrated that the presented approach is more ro-
bust in noisier real-world datasets.
Experimental results show quantitatively and qualita-
tively that our algorithm can deal with different un-
organized point cloud surfaces, can complete surface
segmentation and then apply multi-scale edge extrac-
tion robustly.
Moreover, the proposed algorithm is able to deter-
mine independently the neighborhood size of each
segment in a point. This makes it possible to perform
a precise and semi-automatic edge extraction proce-
dure for point cloud analysis.
The contributions of this paper are in two main as-
pects: first, we declare that considering a single
neighbor size for all the segments of a point cloud is
prone to error, particularly for small segments. There-
fore, in order to have an accurate edge extraction sys-
tem, it is essential to assign an appropriate neighbor
size for each segment of the point cloud. The sec-
ond aspect is that we propose a robust semi-automatic
edge extraction algorithm based on surface segmenta-
tion.
As future work, we aim to exploit the algorithm pro-
posed in (Rieck and Leitte, 2014) in order to analyze
the skeleton of a surface according to the persistent
homology in order to obtain the multi-scale descrip-
tion in a point cloud.
ACKNOWLEDGMENT
This work has been developed in the framework of
projects TEC2013-43935-R and TEC2016-75976-R,
financed by the Spanish Ministerio de Economia y
Competitividad and the European Regional Develop-
VISAPP 2017 - International Conference on Computer Vision Theory and Applications
324

ment Fund (ERDF).
REFERENCES
Bazazian, D., Casas, J., and Ruiz-Hidalgo, J. (2015).
Fast and robust edge extraction in unorganized point
clouds. Digital Image Computing: Techniques and
Applications (DICTA).
Choi, C., Trevor, A. J. B., and Christensen, H. I. (2013).
RGB-D edge detection and edge-based registration. In
2013 IEEE/RSJ International Conference on Intelli-
gent Robots and Systems (IROS), pages 1568–1575.
Daniels, J., Ochotta, T., and Ha, L. (2008). Spline-based
feature curves from pointsampled geometry. Vis.
Comput, 26(6):449–462.
Demarsin, K., Vanderstraeten, D., Volodine, T., and Roose,
D. (2007). Detection of closed sharp edges in point
clouds using normal estimation and graph theory.
Computer-Aided Design, 39(4):276–283.
Feng, C., Taguchi, Y., and Kamat, V. (2014). Fast plane
extraction in organized point clouds using agglomera-
tive hierarchical clustering. IEEE International Con-
ference on Robotics and Automation (ICRA), pages
6218–6225.
Fleischman, S., Cohenor, D., and Silva, T. (2005). Robust
moving least-squares fitting with sharp features. ACM
Trans Graph, pages 37–49.
Gross, M. and Pfister, H. (2007). Point-based graphics (the
morgan kaufmann series in computer graphics). San
Francisco, CA, USA: Morgan Kaufmann Publishers.
Gumhold, S., Wang, X., and Mcleod, R. (2001). Feature
extraction from point clouds. Proceedings of 10th In-
ternational Meshing Roundtable.
Hackel, T., Wegner, J. D., and Schindler, K. (2016). Con-
tour detection in unstructured 3d point clouds. In
CVPR 2016, volume 3, Las Vegas, NV, US.
Ho, H. and Gibbines, D. (2009). Curvature-based approach
for multi-scale feature extraction from 3d meshes and
unstructured point clouds. IET Computer Vision,
3(4):201–212.
Hoppe, H., Derose, T., Duchamp, T., McDonald, J., and
Stuetzle, W. (1992). Surface reconstruction from un-
organized points. In: ACM Siggraph, page 7178.
Ioannou, Y., Taati, B., Harrap, R., and Greenspan, M.
(2015). Difference of normals as a multi-scale op-
erator in unorganized point clouds. 3D Imaging,
Modeling, Processing, Visualization and Transmis-
sion (3DIMPVT), pages 501–508.
Kustra, J., Jalba, A., and Telea, A. (2014). Robust segmen-
tation of multiple intersecting manifolds from unori-
ented noisy point clouds. Computer Graphics Forum,
33(1):73–87.
Lange, C. and K., P. (2005). Anisotropic smoothing of point
sets. Comput Aided Geom Des, 22(7):680692.
Lin, Y., Wang, C., Cheng, J., Chen, B., Jia, C., Chen, Z.,
and Li, J. (2015). Line segment extraction for large
scale unorganized point clouds. ISPRS Journal of
Photogrammetry and Remote Sensing, 102:172–183.
Liu, Y. and Youlun, X. (2008). Automatic segmentation of
unorganized noisy point clouds based on the gaussian
map. Computer-Aided Design, 40(5):576–594.
Mitra, N. and Nguyen, A. (2003). Estimating surface nor-
mals in noisy point cloud data. Proceedings of the
nineteenth annual symposium on computational ge-
ometry, pages 322–328.
Oztireli, C., Guennebaud, G., and Gross, M. (2009). Fea-
ture preserving point set surfaces based on non-linear
kernel regression. Computer Graphics Forum, 28(2).
Park, M., Lee, S., and Lee, K. (2012). Multi-scale tensor
voting for feature extraction from unstructured point
clouds. Graphical Models, 74(4):197–208.
Pauly, M., Keiser, R., and Gross, M. (2003a). Multi-scale
feature extraction on pointsampled surfaces. Com-
puter Graphics Forum, 22(3):281–289.
Pauly, M., Keiser, R., Kobbelt, L., and Gross, M. (2003b).
Shape modeling with point-sampled geometry. ACM
Trans Graph, 22(3):641650.
Rabbani, T., van Den Heuvel, F., and Vosselmann, G.
(2006). Segmentation of point clouds using smooth-
ness constraint. Int. Arch. Photogramm. Remote. Sens.
Spat. Inf. Sci., 36:248–253.
Reisner-Kollmann, I. and Maierhofer, S. (2012). Segment-
ing multiple range images with primitive shapes. 19th
Int. Conf. on Systems, Signals and Image Processing.
Rieck, B. and Leitte, H. (2014). Structural analysis of multi-
variate point clouds using simplicial chains. Computer
Graphics Forum, 33(8).
Sidiropoulos, A. A. and Lakakis, K. N. (2016). Edge Points
Detection in Unorganized Point Clouds. Int. J. Con-
structive Research in Civil Engineering, 2(3):8 – 15.
Son, H. and Kim, C. (2013). Fully automated as-built 3d
pipeline segmentation based on curvature computa-
tion from laser-scanned data. Computing in Civil En-
gineering, pages 765–772.
Wang, Y. and Feng, H. (2015). Outlier detection for scanned
point clouds using majority voting. Computer-Aided
Design, 62:31–43.
Weber, C., Hahmann, S., and Hagen, H. (2010). Methods
for feature detection in point clouds. Visualization of
Large and Unstructured Data Sets IRTG Workshop,
pages 90–99.
Weber, C., Hahmann, S., Hagen, H., and Bonneau, G.
(2012). Sharp feature preserving mls surface recon-
struction based on local feature line approximations.
Graphical Models, 74(6):335–345.
Xu, J., Zhou, M., Wu, Z., Shui, W., and Ali, S. (2015). Ro-
bust surface segmentation and edge feature lines ex-
traction from fractured fragments of relics. Journal of
Computational Design and Engineering, 2(2):79–87.
Zhang, G., Vela, P., and Brilakis, I. (2013). Detecting, fit-
ting, and classifying surface primitives for infrastruc-
ture point cloud data. ASCE Computing in Civil Engi-
neering, pages 589–596.
Segmentation-based Multi-scale Edge Extraction to Measure the Persistence of Features in Unorganized Point Clouds
325
