
Insert Your Own Body in the Oculus Rift to Improve Proprioception
Manuela Chessa, Lorenzo Caroggio, Huayi Huang and Fabio Solari
Dept. of Informatics, Bioengineering, Robotics, and Systems Engineering,
University of Genoa, Viale Causa 13, Genoa, Italy
Keywords:
Head-mounted-displays, Microsoft Kinect, Leap Motion, Virtual Reality, Registration and Calibration,
Self-perception.
Abstract:
A natural interaction in virtual reality environments, in particular when wearing head-mounted-displays, is
often prevented by the lack of a visual feedback about the user’s own body. This paper aims to create a virtual
environment, in which the user can visually perceive his/her own body, and can interact with the virtual objects,
by using a virtual body that replicates his/her movements. To this aim, we have set up an affordable virtual
reality system, which combines the Oculus Rift head-mounted-display, a Microsoft Kinect, and a Leap Motion,
in order to recreate inside the virtual environments a first-person avatar, who replicates the movements of the
user’s full-body and the fine movements of his/her fingers and hands. By acting in such an environment, the
user is able to perceive him/herself thus improving his/her experience in the virtual reality. Here, we address
and propose a solution to the issues related to the integration of the different devices, and to the alignment and
registration of their reference systems. Finally, the effectiveness of the proposed system is assessed through
an experimental session, in which several users report their feeling by answering to a 5-points Likert scale
questionnaire.
1 INTRODUCTION AND
RELATED WORKS
The main motivation of the present work is to over-
come the lack of presence of the user own body in
virtual reality (VR) systems, in particular when wear-
ing a head-mounted-display (HMD). The aim of the
paper is to create a virtual environment in which the
user can visually perceive his/her own body, and can
interact with the virtual objects by using a body that
reproduces his/her movements. In particular, the fo-
cus is on having a realistic and natural interaction
through all the body and, in addition, a fine interac-
tion with the hands. VR systems are commonly able
to elicit a strong sense of presence, allowing the user
to perform several uncommon operations in a safe en-
vironment: for example, in medical applications, in
(Ahlberg et al., 2002) it was observed that VR simu-
lation was able to predict the surgical outcome; also in
(Seymour et al., 2002) it was demonstrated the effec-
tiveness of the VR training in improving the operation
room performances.
The use of the hands in a virtual environment, in
order to have a better feeling of presence, was dis-
cussed in (Tecchia et al., 2014) with the aim of train-
ing the user, and in (Beattie et al., 2015) to use CAD
packages. The outcomes of such works consist in
a more natural way of interacting with the environ-
ments, and in the creation of more immersive virtual
systems.
However, the impossibility of having the full con-
trol and a natural perception of own virtual body often
gives a sense of unnaturalness to the user actions and
decreases the effectiveness of transferring the skills
acquired in the virtual environment to the real operat-
ing environment. In fact, one of the most important
differences of performing an experience in a virtual
context or in a real one, is related to the self-body
visual perception. For example, in a CAVE system
(Creagh, 2003), users can still see their body: this has,
of course, a great impact on the experience, especially
in tasks, where the interaction between the user and
the virtual environment is required. Avatar represen-
tation can be used, but it rarely correspond exactly to
the dimensions or current posture of the user.
In the literature, some researchers have used the
Kinect in order to animate an avatar inside a VR envi-
ronment for the Oculus Rift (Lee et al., 2015), but this
work has not the aim of recreating the self-perception
of the HMD user. Recently, in (Sra and Schmandt,
2015) the authors achieved the tracking of the users
body with a Kinect device such that their physical
Chessa, M., Caroggio, L., Huang, H. and Solari, F.
Insert Your Own Body in the Oculus Rift to Improve Proprioception.
DOI: 10.5220/0005851807550762
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 755-762
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
755

movements are mirrored in the virtual world, in a
collaborative environment. Users can see their own
avatar and the other person’s avatar allowing them to
perceive and act intuitively in the virtual environment.
In order to address the proprioception of own body
in VR, we propose to fuse the data acquired by an
RGB-D camera and by a low-price hand-tracking de-
vice, to reconstruct an accurate avatar, which moves
in a coherent way with the user. Some authors have
recently addressed the problem of fusing information
acquired by the RGB-D devices and the Leap Motion,
e.g. in (Penelle and Debeir, 2014) the authors create
an augmented reality system to be used with amputees
patients, and in (Ahmed et al., 2014), where an ap-
proach to fuse Kinect range images and Leap Motion
data for immersive augmented reality applications is
described.
The aim of our work is to set up an affordable
VR system, which combines the Oculus Rift HMD, a
RGB-D device, i.e. the Microsoft Kinect, and a Leap
Motion, in order to allow a user to perceive his/her
own body inside the VR environments also by taking
into account fine details, such as the fingers’ move-
ments, thus bridging the gap between the HMD sys-
tems and the CAVE system.
2 MATERIAL AND METHODS
The proposed system has been designed using differ-
ent sensors to track of the entire body of the user. The
depth and color images from the Microsoft Kinect
1
provide a quite robust tracking of the users move-
ments and at the same time the Leap Motion
2
pro-
vides a more precise tracking of the users hands and
fingers position. We have also developed a calibra-
tion method that computes the rigid transformation to
align the two different frames of references expressed
from the two sensors. After the calibration, the data
from the Kinect and the Leap Motion (LM) are fused
together and used to control a first-person 3D avatar,
which is showed inside a virtual environment, by us-
ing as HMD the Oculus Rift
3
(OR). The virtual en-
vironment has been created by using Unity3D 5
4
,
which also makes the assets for acquiring data from
Kinect and LM available in its store. The data fusion
gives some advantages: more accurate tracking of the
users hands and fingers, and extension of the tracking
range by providing hand locations when they are not
visible to the Kinect.
1
https://dev.windows.com/en-us/kinect
2
https://developer.leapmotion.com/
3
https://developer.oculus.com/
4
https://unity3d.com/5
2.1 Description of the System Setup
Figure 1 shows an overview of the VR system de-
scribed in the paper. The user stands in front of
the Kinect at a distance of about 1.5m wearing the
OR. The Leap Motion is attached on the OR, and the
Kinect is located in a table. The user is free to move
over an area of about 1.5m
2
in order to interact with
the 3D objects in the virtual environment. The area
where the objects appear is set to be in the reaching
range for the entire users body.
Figure 1: Overview of the proposed system.
The device used for Virtual Reality is the Oculus
Rift DK2: its lenses distortion allows the user to have
a really immersive experience with an estimated field
of view of 100 degrees. The device has a resolution
of 2160x1200 pixels and connected via HDMI 1.3 and
via USB2.0. The OR is very comfortable with a high
frame rate of about 90Hz and contains several sensors
such as the accelerometer, the gyroscope and mag-
netometer, which are used to track user position and
movement while wearing it. It is also present an ex-
ternal camera, the OR camera, which is available to
track the OR with an update rate of 60Hz and estimate
its location in a Cartesian coordinates system centered
on the camera.
To make the system works fine, it requires a
slightly powerful computer and a large bandwidth to
manage the data flow from the two sensors simulta-
neously. The used machine specification are: a PC
with Mother Board Asrock Z77 Extreme4, equipped
with graphic card NVIDIA GeForce CTX 960, pro-
cessor Intel Core i5 2500k 3.30 GHz, 8GB of RAM,
operating system Windows 10 Pro 64bit.
2.2 Body Tracking
The data stream for tracking the user is acquired by
the Kinect, through a synchronization of depth and
color images with a resolution of 640x480 pixels at
a frame rate of 30Hz. The images are analyzed by
VISION4HCI 2016 - Special Session on Computer VISION for Natural Human Computer Interaction
756
the Kinect MS-SDK Assets, available in the Unity as-
set Store, which uses the Kinect Runtime provided by
Microsoft to make the tracking information suitable
to move an avatar. The asset gives information on the
tracking of twenty joints of the users body which are
then aligned with those acquired by the Leap Motion
(more details on the alignment procedures are in Sec-
tion 2.4).
2.3 Hand Tracking
The accurate tracking of the users hands and fingers
are performed by the Leap Motion, which is a small
sensor connected via USB 2.0 and placed on the Ocu-
lus Rift support in front the users eyes. It is composed
of two wide-angle infrared CCD cameras with an ac-
quisition frequency of about 120 Hz and the detection
field is approximately a hemisphere of 0.5m radius
above the sensor.
The technology behind the Leap Motion has not
be released by the manufacturer yet but the accuracy
announced for the position detection of the fingertips
is approximately 0.01mm. For more details, in (We-
ichert et al., 2013) the authors have conducted a study
on the accuracy and robustness of the Leap Motion.
The acquired data are elaborated by the Leap Motion
SDK, which makes available the locations of the cen-
ter of the palm and of each single finger. The infor-
mation is expressed in a Cartesian coordinates system
centered on the device.
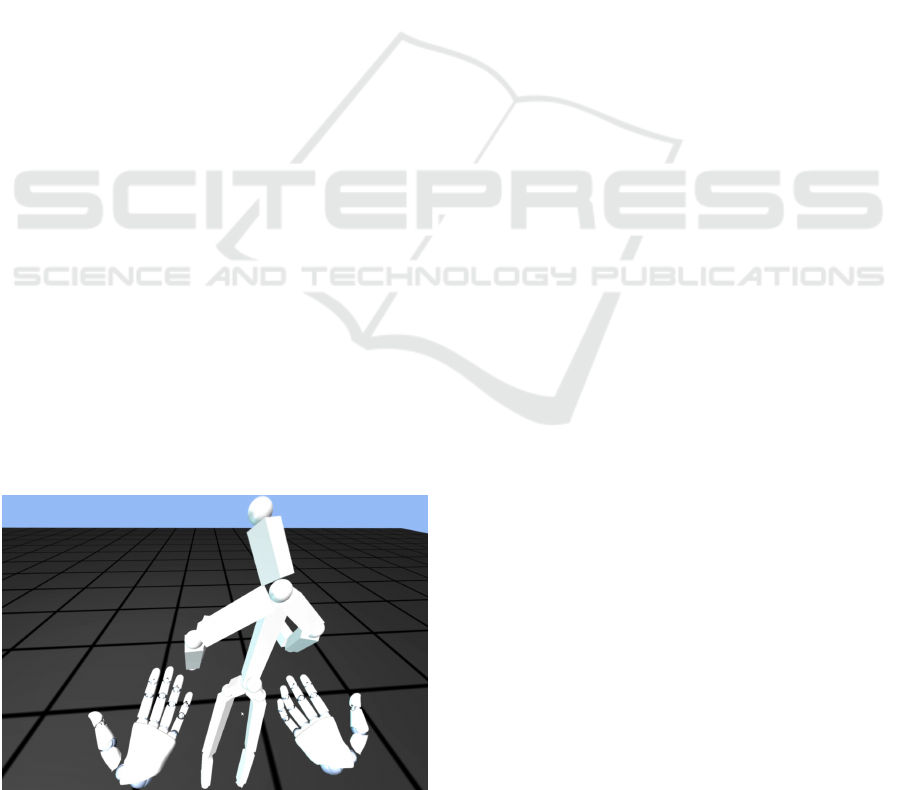
2.4 Calibration
Before the calibration step the data acquired by the
two sensors are used to produce a virtual avatar as in
Figure 2.
To align the data of all sensors, the calibration
phase is done in two steps:
Figure 2: Own avatar inside the VR environment by using
uncalibrated data.
• Rigid transformation between common points ac-
quired by the Kinect and the Leap Motion, com-
puted just once.
• Live corrections to overcome the residual offset
present between the Kinect and the Leap Motion
tracking, and management of the head position
over time, computed every frame.
Thanks to the Leap Motion Core Assets plug-in for
Unity3D, the Leap Motion and the Oculus Rift are al-
ready very well aligned: the two cameras of the Leap
Motion allow us to use the Oculus-Leap system as a
pass-through head mounted device, and to verify the
correctness of the alignment embedded in the plug-in.
The data obtained by the Kinect is properly low
pass filtered, in order to remove most of the noise,
maintaining realistic movements of the body.
2.4.1 Rigid Transformation
To compute the rigid transformation, we use the
“least-square rigid motion using SVD” technique
(Sorkine, 2009), implemented in C# language, in or-
der to have a fast and reliable implementation of this
technique in the Unity3D environment. The method
can be formulated in the following way:
(
¯
R,
¯
t) = argmin
R,t
n
∑
i=1
k(Rp
i
+ t) − q
i
)k
2
,
where:
• R is the rotation matrix between the two sets of
points (and
¯
R the computed estimate) ;
• t is the translation vector between the centers of
mass of the two sets of points (and
¯
t the computed
estimate);
• P = {p
1
, p
2
, ..., p
n
} are the Leap Motion samples;
• Q = {q
1
, q
2
, ..., q
n
} are the Kinect samples;
• n is the number of samples.
Such a method requires several correspondences be-
tween the two systems to align them; in our case, we
have some common joints tracked by both the Kinect
and the Leap Motion: the centers of the hands, the
wrists, the elbows.
The result of the rigid transformation, done on a
single set of samples, often leads to have an alignment
visually incorrect; this is due to multiple factors:
• possible coplanar structure of the points: hands,
wrists, elbows almost on the same plane;
• noise that affects the Kinect joints: in particular
hands and wrists;
• frequent mismatch between the centers of the
hands, due to the noise and to the worse accuracy
of the Kinect, with respect to the Leap Motion.
Insert Your Own Body in the Oculus Rift to Improve Proprioception
757

To overcome this problem, we have taken in consider-
ation the use of less joints and more samples in time.
We decided to remove the centers of the hands from
the list of matching points (so we take in considera-
tion 4 points for each frame, the two wrists and the
two elbows) and 500 samples over time: during the
calibration period, the user have to move his/her arms
a little bit, paying attention that both are tracked by
the two sensors.
In order to maintain the correct distance between
the Oculus Rift point of view (POV) and the hands, as
well as its correct rotation, looking at the hands dur-
ing the phase of rigid transformation, we set the Ocu-
lus child-node to the middle point of the Leap Motion
matching points in the Unity3D environment: consid-
ering that, as explained in (Sorkine, 2009), the rota-
tion is done around the middle point, this ensures to
maintain a correct behavior of the POV.
After that, the visual result of the rigid transfor-
mation is far better than before, in particular for what
concerns the legs (see Figure 3). The Kinect and the
Leap Motion hands, however, still do not perfectly
overlap over time, because of the different precision
and the position of the two sensors.
Figure 3: Own avatar inside the VR environment, after the
calibration and the rigid trasformation.
2.4.2 Live Corrections
In order to have a unique body structure, which shows
a continuity between the arms tracked by the Leap
Motion and the rest of the body tracked by the Kinect,
we have to better fuse the data from the two sensors.
In particular, we choose to use only the positions pro-
vided by the Leap Motion, because of its better preci-
sion, when the arms are tracked by both sensors, and
use the data obtained by the Kinect, when the hands
are out of the range of the Leap Motion.
Thanks to the previous rigid transformation, the
legs are visually correct, even if they are not so
aligned as the hands. In second place, we manage
the movements of the point of view of the user in
a way that is consistent with the movements of the
head, to let the user move around having his/her vir-
tual body, which moves in a coherent way with his/her
real movements. There are two procedures to do this:
• Link the Oculus POV to the head joint tracked by
the Kinect: this solution allows the user to move
in all the area in which the Kinect is able to track
the user, but, because of the noise that affects the
measurement, the VR camera tends to suffer of
small oscillations, that have a bad impact on the
general sense of immersion of the user;
• Use the Oculus Positional Tracker (i.e. the OR
camera): this is the best solution in term of real-
ism of the movements of the head, but the area is
limited to the range and the direction of the Ocu-
lus Positional Tracker.
In order to obtain the most realistic solution, we
use the second solution; the position computed by
the Oculus Positional Tracker is affected by a little
drift-offset respect to the position obtained from the
Kinect, but it seems not to be relevant in the truthful-
ness of the body perception (see Figure 4).
Figure 4: Own avatar inside the VR environment: final re-
sult after calibration process.
Finally, Figure 5 shows the system work flow: at
each start we have to perform the calibration phase,
during which the system collects the data for the rigid
transformation, only if they are available from both
the Kinect and the Leap Motion. Once the system is
calibrated, we apply live corrections to use the best
data and animate correctly the hands, if the Leap Mo-
tion is tracking them. However, as explained before,
there is the possibility to go out of range of the Ocu-
lus camera: in this case, a warning message invites
the user to step back into the tracking range.
VISION4HCI 2016 - Special Session on Computer VISION for Natural Human Computer Interaction
758
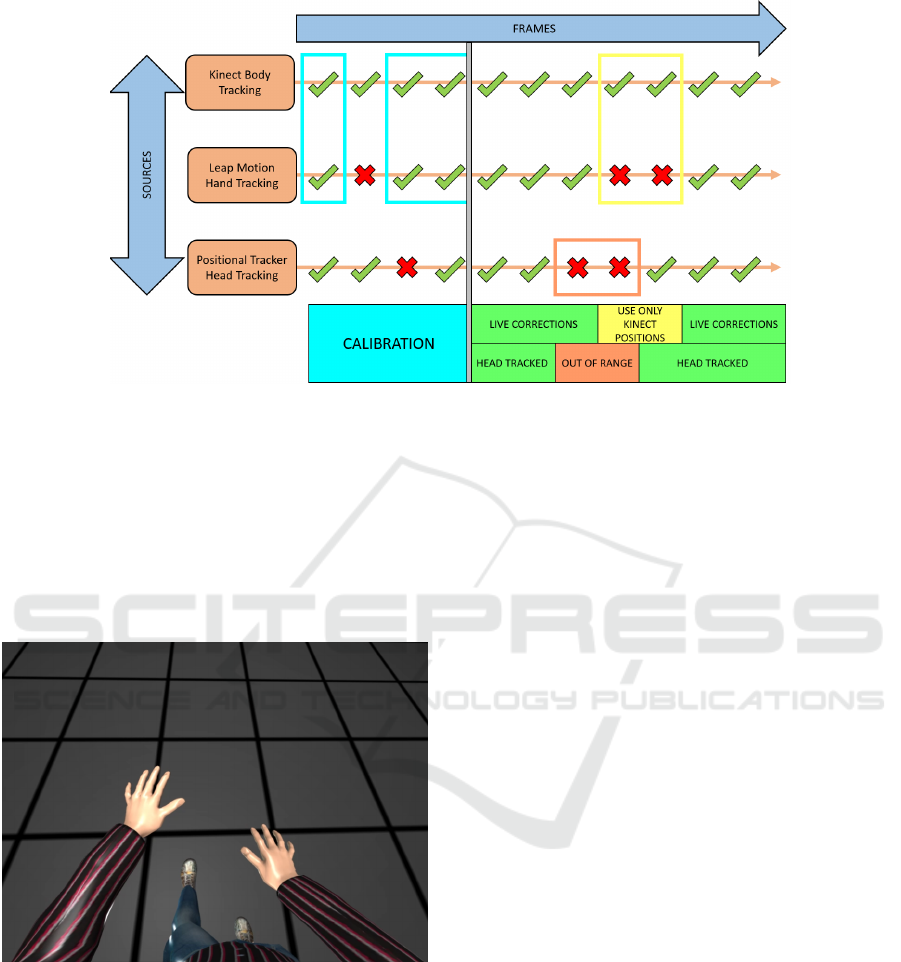
Figure 5: The system work flow: (i) at each start a calibration is performed, during which the system collects the data for the
rigid transformation (only if they are available from both the Kinect and the Leap Motion); (ii) once the system is calibrated,
live corrections are operated to use the best data and correctly animate the hands (if the Leap Motion is tracking them).
2.4.3 Adding a Mesh to the Avatar
With the aim of giving an even more realistic sense
of presence in the VR, we added a human mesh to
the scene as the body of the user (see Figure 6), but
see (Lugrin et al., 2015).
Figure 6: Adding a human mesh to the tracked skeleton.
We animated the mesh taking inspirations from
the skeleton we reconstructed and scaling in a proper
way to fit the user, but several problems came out.
The main issue consists in the different way of ani-
mating the skeleton and the mesh. The former is an-
imated by giving to the joints the positions taken by
the Kinect and the Leap Motion and by connecting
them with simple structures, like parallelepipeds.The
latter is animated by giving to each bones of the skele-
ton linked with the mesh a correct rotation. So, the
challenge was to calculate, from the first skeleton we
made, the correct angles to be given to the second
skeleton in order to obtain the same movements. This
work required a proper mapping of the movement of
the first skeleton to a set of rotations to apply to the
second one, in relation to the starting position of the
mesh, in particular the initial rotation of every bone
of the second skeleton. Another problem involves the
structure of the second skeleton and the noise which
affects the Kinect data: each bones is nested with the
previous one. In this way, the noise that affects a sin-
gle joint, propagates to the following, altering the fi-
nal result. The final result is a more realistic body,
which may lead to a good feeling of presence in the
virtual environment, but the positions of the hands re-
sult to be less realistic than in the previous case, thus
hampering a proper interaction with the virtual ob-
jects of the scene. This is due to the propagating noise
coming from the Kinect data. A solution to this prob-
lem represents one of the future steps of this work.
3 EXPERIMENTAL EVALUATION
To validate the quality of the proposed system, we
have created an experimental session, which was at-
tended by 14 subjects: the participants were both male
and female, with ages ranging from 20 to 50, and
with normal or corrected-to-normal vision. In this ex-
periment, we recreate a simple skeleton consisting of
small spheres, in place of the joints tracked by the
Kinect, and parallelepipeds, in place of the bones of
the subject, except for the hands, for which we used
the ones of the model included in the Leap Motion
Insert Your Own Body in the Oculus Rift to Improve Proprioception
759

Core Assets for Unity3D. A simple skeleton for the
body, composed of basic objects, allows us to bet-
ter manage the data acquired by the Kinect and to
provide a coarse interaction with the virtual environ-
ment. Meanwhile, a more complex but tested model
for the hands guarantees us a better feeling of pres-
ence and a more accurate interaction with the virtual
objects. Figure 7 shows a snapshot of the experi-
mental session: on the left there is an image from
the Oculus Rift, where it is possible to see the re-
construction of the user’s hands and the virtual ob-
jects with which he/she can interact, on the right
there is the acquisition from the point of view of
the RGBD sensor. Moreover, a video showing the
system and the experimental session is available at
https://youtu.be/2UaxkyZbeLQ.
Figure 7: A snapshot of the experiment: (left) scene from
the Oculus Rift, and (right) from the RGB-D camera.
After the calibration phase, carried out for each
subject, the users were free to move in an area of
about 1.5m
2
and to explore the movements of the
skeleton, to ensure that they were coherent with their
movements; then some floating cubes were shown
and the subjects were free to interact with them, by
moving them with the hands and with the entire skele-
ton.
The aim of the experimental validation was to test
the level of immersivity and the experience of the
users that tested the proposed system. The sensa-
tion of presence (or level of immersion) is often mea-
sured by means of self-rated questionnaires (Gorini
et al., 2011). Several examples can be found in the
literature: in the UCL Presence Questionnaire partic-
ipants are required to provide ratings on a seven level
Likert scale (Slater et al., 1994), and in the Indepen-
dent Television Company Sense of Presence Inven-
tory (ITCSOPI) users are evaluated postexposure by
providing scores on a five level Likert scale (Lessiter
et al., 2001). In this paper, we have taken inspiration
from the questionnaires present in the literature, and
at the end of the session, users were asked to answer
a questionnaire with 13 close-ended questions. Sub-
jects rated their feelings on a 5-points Likert scale,
where 1 indicated negative feelings at all and 5 in-
dicated the most positive experience. The questions,
listed below, were related to: the quality of the VR
scenario (Q1-Q4), the truthfulness of the virtual body
(Q5-Q9), the sense of immersion in the VR (Q10-
Q13).
Q1 How often do you play videogames?
Q2 How much was the scenario immersive?
Q3 How much lag did you notice in the scenario?
Q4 How much did the visual aspects of environment
involve you in the scenario?
Q5 How strongly did you feel your virtual body was
truly?
Q6 How much did you feel your virtual body follow
your real movement?
Q7 How much did the virtual body help you to in-
crease the sense of presence in the environment?
Q8 How much natural was your interaction with the
object?
Q9 How closely were you able to examine your
hands?
Q10 How much did your experiences in the virtual
environment seem consistent with your real world ex-
periences?
Q11 How compelling was your sense of moving
around inside the virtual environment?
Q12 How much did the screen resolution negatively
affect your sense of presence?
Q13 Did you feel more immersed in the VR over
time?
The distribution and the statistics of the responses
to the 13 questions are reported in Figure 8.
In general, the feeling about the developed system
Figure 8: Questionnaire results: box plots of the scores (on
the 5-point Likert scale) given by the subjects to the 13
questions. The red lines represent the median scores, the
blue boxes are scores between the first and the third quar-
tiles.
VISION4HCI 2016 - Special Session on Computer VISION for Natural Human Computer Interaction
760

was good. Question Q2 about immersivity reported a
median value of 4, together with Q5 about the posi-
tive feeling about the user’s own virtual body inside
the VR environment. Nevertheless, users were critic
about the natural interaction with the objects (ques-
tion Q8, median 3) and about the sense of moving
around inside the environment (question Q11, median
3). Of course, in such a system the sense of touch
is not addressed, though a tactile feedback, also by
means of a sensorial substitution, might help the user.
To sum up, the goals of this experiment were: (i)
to assess the performances of the proposed system, for
what concerns the responsiveness of the reconstructed
skeleton to the real movements of the user; (ii) to ver-
ify the effects of a full-body controllable avatar on the
feeling of presence in the VR. This experiment con-
firms the validity of the developed system, even in its
first prototypal implementation.
4 CONCLUSION AND
DISCUSSION
In this paper, we have presented a method to insert the
avatar of the user own body, which gives the visual
feedback and replicates the movements of the user, in
a VR environment, enjoyed through an HMD. In par-
ticular, our scope was to improve the sense of pres-
ence by using immersive devices, such as the Oculus
Rift. In order to replicate the movements of both the
body of the user, and of his/her hands, by also taking
into account the fine details of the fingers, we have
proposed to use both a Microsoft Kinect, which ac-
quires the entire body of the users, and a Leap Mo-
tion, a low cost device used to measure and track the
fingers. Such devices must be accurately registered in
order to obtain stable and robust measures, with re-
spect to a coherent reference system. To this aim, we
present a 2 steps procedure to achieve such a registra-
tion: (i) a rigid transformation through a least-square
SVD, from which we estimate the roto-translation to
align common points acquired by the two devices;
(ii) a live correction, by also taking into account the
movements of the users, captured through the Oculus
Positional Tracker.
We assessed the proposed VR system through an
experimental session, attended by 14 subjects who an-
swered to a self-reported questionnaire. The results
show that the users have a positive feeling about the
proposed system, in particular with respect to the im-
mersivity and to the sense of presence.
ACKNOWLEDGEMENTS
The authors would like to thank Prof. George Dret-
takis and Dr. Adrien Bousseau of the GRAPHDECO
group, INRIA Sophia-Antipolis, France.
REFERENCES
Ahlberg, G., Heikkinen, T., Iselius, L., Leijonmarck, C.-E.,
Rutqvist, J., and Arvidsson, D. (2002). Does training
in a virtual reality simulator improve surgical perfor-
mance? Surgical Endoscopy and Other Interventional
Techniques, 16(1):126–129.
Ahmed, B., Yoo, J. D., Lee, Y. Y., Jang, I. Y., and Lee, K. H.
(2014). Fusion of Kinect range images and Leap Mo-
tion data for immersive AR applications. Proceedings
of the Society of CAD/CAM Conference, pages 382–
387.
Beattie, N., Horan, B., and McKenzie, S. (2015). Taking
the LEAP with the Oculus HMD and CAD-Plucking
at thin air? Procedia Technology, 20:149–154.
Creagh, H. (2003). Cave automatic virtual environment. In
Electrical Insulation Conference and Electrical Man-
ufacturing & Coil Winding Technology Confer-
ence, 2003. Proceedings, pages 499–504.
Gorini, A., Capideville, C. S., De Leo, G., Mantovani, F.,
and Riva, G. (2011). The role of immersion and nar-
rative in mediated presence: The virtual hospital ex-
perience. Cyberpsychology, Behavior, and Social Net-
working, 14(3):99–105.
Lee, D., Baek, G., Lim, Y., and Lim, H. (2015). Vir-
tual Reality contents using the OculusRift and Kinect.
Mathematics and Computers in Sciences and Indus-
try, pages 102–104.
Lessiter, J., Freeman, J., Keogh, E., and Davidoff, J. (2001).
A cross-media presence questionnaire: The ITC-sense
of presence inventory. Presence, 10(3):282–297.
Lugrin, J.-L., Latt, J., and Latoschik, M. (2015). Avatar
anthropomorphism and illusion of body ownership in
VR. In Virtual Reality (VR), 2015 IEEE, pages 229–
230.
Penelle, B. and Debeir, O. (2014). Multi-sensor data fusion
for hand tracking using Kinect and Leap Motion. In
Proceedings of the 2014 Virtual Reality International
Conference, page 22.
Seymour, N. E., Gallagher, A. G., Roman, S. A., OBrien,
M. K., Bansal, V. K., Andersen, D. K., and Satava,
R. M. (2002). Virtual reality training improves op-
erating room performance: results of a randomized,
double-blinded study. Annals of surgery, 236(4):458.
Slater, M., Usoh, M., and Steed, A. (1994). Depth of pres-
ence in virtual environments. Presence, 3(2):130–144.
Sorkine, O. (2009). Least-squares rigid motion using SVD.
Technical notes, 120:3.
Sra, M. and Schmandt, C. (2015). Metaspace: Full-body
tracking for immersive multiperson Virtual Reality. In
Proceedings of the 28th Annual ACM Symposium on
User Interface Software & Technology, pages 47–48.
Insert Your Own Body in the Oculus Rift to Improve Proprioception
761

Tecchia, F., Avveduto, G., Brondi, R., Carrozzino, M.,
Bergamasco, M., and Alem, L. (2014). I’m in VR!:
using your own hands in a fully immersive MR sys-
tem. In Proceedings of the 20th ACM Symposium on
Virtual Reality Software and Technology, pages 73–
76.
Weichert, F., Bachmann, D., Rudak, B., and Fisseler, D.
(2013). Analysis of the accuracy and robustness of the
Leap Motion controller. Sensors, 13(5):6380–6393.
VISION4HCI 2016 - Special Session on Computer VISION for Natural Human Computer Interaction
762
