
An Interactive Context-aware Power Management Technique for
Optimizing Sensor Network Lifetime
Jinseok Yang
1
, Sameer Tilak
2
and Tajana S. Rosing
3
1
Department of Electrical and Computer Engineering, UCSD, La Jolla, CA, U.S.A.
2
CalIT2, UCSD, La Jolla, CA, U.S.A.
3
Department of Computer Science and Engineering, UCSD, La Jolla, CA, U.S.A.
Keywords:
Wireless Sensor Network, Environment Monitoring, Power Management.
Abstract:
A key problem in sensor networks equipped with renewable energy sources is deciding how to allocate energy
to various tasks (sensing, communication etc.) over time so that the deployed network continues to gather
high-quality data. The state-of-the-art energy allocation algorithm takes into account current battery level and
harvesting energy and fairly allocates as much energy as possible along the time dimension. In this paper we
show that by not considering application-context this approach leads to very high and uniform sampling rates.
However, sampling the environment at fixed predefined intervals is neither possible (need to accommodate
system failures) nor desirable (sampling rate might not capture an important event with desired fidelity). To
that end, in this paper we propose a novel interactive power management technique that adapts sampling rate as
a function of both application-level context (e.g., user request) and system-level context (e.g harvesting energy
availability). We vary several key parameters including application request patterns, geographic locations,
time slot length, battery end point voltage and evaluate the performance of our approach in terms of energy
efficiency and accuracy. Our simulations use sensor data and system specifications (battery and solar panel
specs, sensing and communication costs) from a real sensor network deployment. Our results show that the
proposed approach saves significant amounts of energy by avoiding oversampling when application does not
need it while using this saved energy to support sampling at high rates to capture events with necessary fidelity
when needed. The computational complexity of our approach is lower (O(n)) than the state-of-the-art non-
interactive energy allocation algorithm (O(n
2
)).
1 INTRODUCTION
Sensor networks are revolutionizing the scientific
applications by gathering data about the natural
(Mainwaring et al., 2002)(Cerpa et al., 2001)(CRE,
2013)(GRE, 2015) and built environment data at un-
precedented spatio-temporal granularity. A key prob-
lem in sensor networks is deciding how to allocate
energy to various tasks (sensing, communication etc.)
over time so that the deployed network continues to
gather high-quality data. There has been extensive re-
search in the area of power management and resource
allocation algorithms in sensor networks. However,
new challenges arise for sensors equipped with re-
newable energy sources (Chang and Bonnet, 2010).
Fair energy allocation along time dimension in sen-
sor networks with renewable energy is important in
order to support constant operation. It has two im-
plications: allocating as much energy as possible re-
sults in high frequency sampling and fair energy allo-
cation over time results in sampling the environment
at fixed rate. Our experience with real-world sensor
network deployments in collaboration with limnolo-
gists and coral reef ecologists shows that the afore-
mentioned high frequency fixed rate sampling tech-
nique does not work well in practice because of the
following reasons.
Real-world Deployments Depend on Periodic Inter-
action to Maintain Optimal Sampling Regime: Sen-
sor networks need periodic interaction primarily for
the following two reasons. (A) Early identification
of system failures: Sensor networks embedded in in-
hospitable environment are prone to fail for a vari-
ety of reasons such as biofouling, exposure to ex-
treme temperature or humidity etc. (B) Identification
of interesting trends: Both anticipated (nightly tem-
perature drops) and unanticipated episodic events (ty-
phoon, hurricanes etc.). At present the interaction is
Yang, J., Tilak, S. and Rosing, T.
An Interactive Context-aware Power Management Technique for Optimizing Sensor Network Lifetime.
DOI: 10.5220/0005728600690076
In Proceedings of the 5th International Confererence on Sensor Networks (SENSORNETS 2016), pages 69-76
ISBN: 978-989-758-169-4
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
69
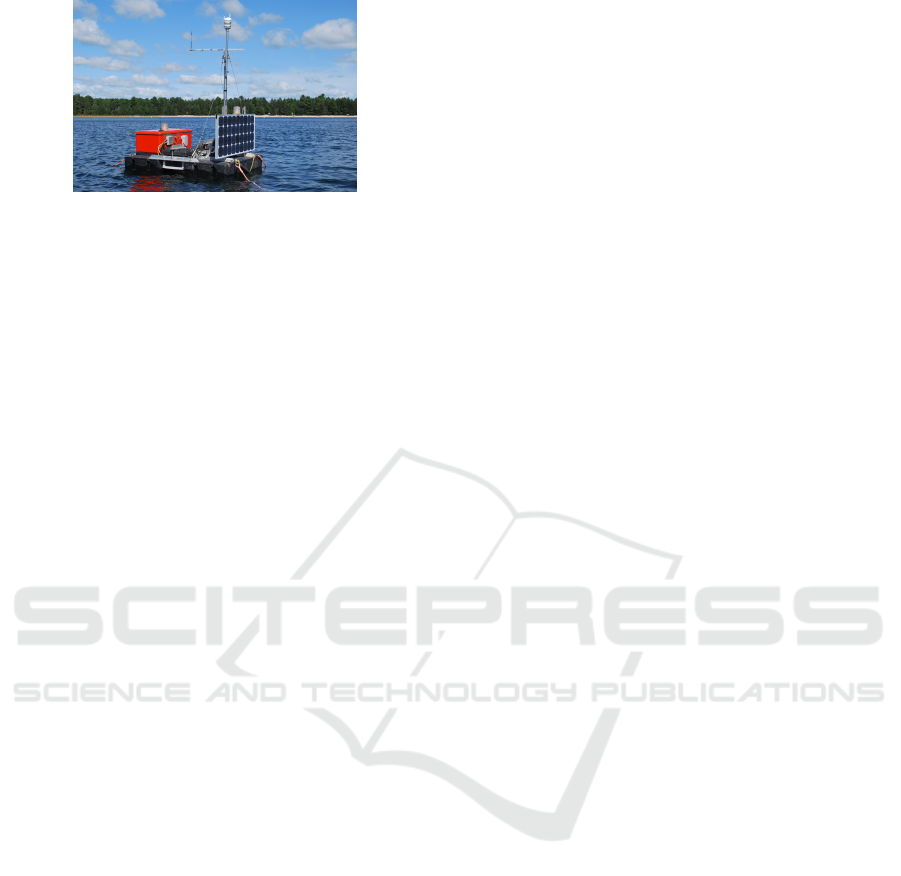
Figure 1: Buoy deployed in a lake located in northern Wis-
consin, USA measuring several key limnological variables.
manual, where the domain scientists periodically look
at the incoming data to ensure that it is generating
science-quality data (Chang and Bonnet, 2010). Sci-
entists also often explore the data to see if something
interesting happened in last day or two and whether
the current sampling rate is sufficiently capturing the
events with necessary fidelity. At present, it is too
complex to automate this process. This is both due
to lack of priori knowledge of the all possible events
and system failures and specifying and capturing all
the interesting events and system failures. In addi-
tion, even if the events are known, programming and
detecting all possible events makes the system pro-
hibitively complex. In future, as machine learning al-
gorithms will be more sophisticated and sensor net-
works become equipped with more computing power,
we believe that this manual approach will be replaced
by an automated system that requires no human in-
teraction. Never the less, either a real end user or an
automated system will interact with the deployed net-
work on a periodic basis. In this paper we use the term
”user request” to denote both the request generated by
human beings as well as automated systems.
Periodic Sampling at Fixed Rate Is Not Sufficient:
Sampling the environment at fixed predefined inter-
vals is neither reliable (need to accommodate system
failures) nor desirable (current sampling rate might
not capture an important event with desired fidelity)
(Chang and Bonnet, 2010). We now explain this in
detail. Failure: Suppose monitoring system monitors
both temperature and humidity level at every 1 min.
If either measurement is missing the other is useless.
This indicates that the missing value should be com-
pensated by either repeating a measurement within a
few seconds. Interesting events: Consider an applica-
tion that requires sampling a sensor at a high rate (i.e.
10 samples/seconds) when rain is detected and other-
wise a much lower sample rate (i.e. 1 sample/minute).
Scientists therefore want systems that can adapt sam-
pling rates and meet their science requirements. Peri-
odic sampling can often result in either oversampling
(thereby wasting energy) or under sampling (thereby
not capturing an event with necessary fidelity).
Setting Sampling Regime Is Often an Exploratory and
Iterative Process: Scientists are often operating in
unexplored territory and therefore setting up sampling
rate is not a one-time process, but is an iterative and
exploratory process. Scientists typically set the sam-
pling rate to the best of their knowledge and then use
the gathered data to adjust it. This process can take
anywhere from few days to few months.
Based on these observations, we propose a novel in-
teractive power management technique that adapts
sampling rate as a function of both application-level
context (e.g., user request) and system-level context
(e.g harvesting energy availability and stored energy).
We prove the energy-efficiency and accuracy of the
proposed approach using data and infrastructure de-
tails (battery levels, sensing every consumption etc.)
from a real-world deployment.
2 RELATED WORK
There has been considerable work in the area of
sensor network reprogramming (Hui and Culler,
2004)(Levis and Culler, 2004)(Naik et al., 2007).
These approaches are mainly designed for real
network-wide software updates and are not suitable
for more frequent sampling rate updates. The in-
dustrial automation systems or building management
systems integrated with control system require guar-
anties for real-timeliness, functional safety, security,
energy efficiency, etc (Chen et al., 2010). In these
sensor-actuator networks resource allocation deci-
sions are typically done in a centralized manner (at
the plan data center). In contrast, we propose a fully
distributed approach for energy allocation.
Context has been used extensively for efficient
sensor network protocol design in the area of rout-
ing (Koo et al., 2009)(Zhou and Hou, 2007), clus-
ter formation (Haque et al., 2009), and power man-
agement (Wood et al., 2008). Context aware power
management protocol (Wood et al., 2008) proposed a
context aware power management protocol considers
heterogeneous energy sources in which some nodes
are powered by batteries and others are plugged into
wall. However, they do not consider green energy
sources in their research. Solar energy allocation al-
gorithm (Gorlatova et al., 2011) determines fair en-
ergy allocation along time dimension in systems with
predictable as well as stochastic renewable energy in-
puts. Their energy allocation algorithm – Progressive
Filling (PF) fairly allocates energy over time dimen-
sion and it has O(n
2
) computational complexity. PF
algorithm starts from time slot 0 and increments its
allocated energy by α until it reaches the target bat-
SENSORNETS 2016 - 5th International Conference on Sensor Networks
70
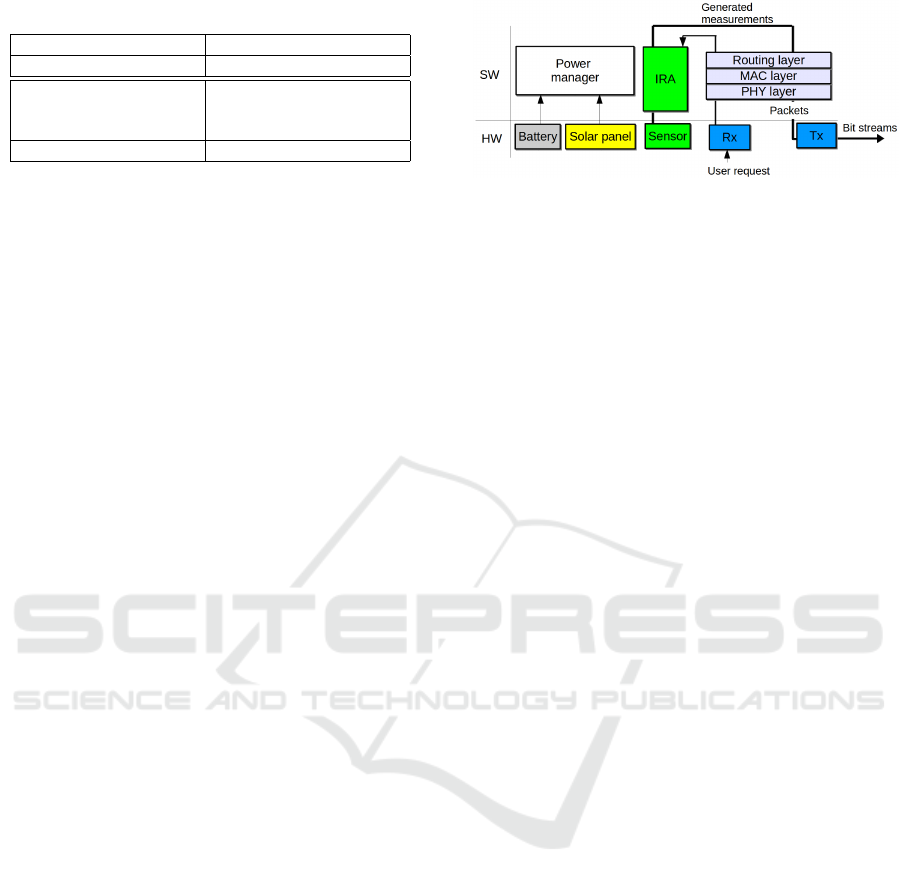
Table 1: Power specification for our deployment.
Device Power consumption(W)
3G cost+Processing 5
Vaisala Weather Station 0.168
Sonde 3.372
Templine 0.42
Sensing cost 3.96
tery level. Since PF is the state-of-the-art energy al-
gorithm, we use it to compare with the proposed inter-
active technique. In this paper we use interchangebly
use PF algorithm and non-interactive technique. To
the best of our knowledge, this is the first work that
proposes a novel interactive power management tech-
nique that adapts sampling rate as a function of both
application-level context (e.g., user request) and the
system-level context (e.g harvesting energy availabil-
ity).
Solar panels are frequently used in sensor net-
works because they can theoretically provide quite
a bit of harvested energy. However, they are not a
reliable, consistent source of energy because of the
Sun’s cycles and the everchanging weather condi-
tions. To that end, short-term solar prediction al-
gorithms (Kansal et al., 2007)(Piorno et al., 2009)
have been studied. Exponentially Weighted Moving-
Average (EWMA) (Kansal et al., 2007) algorithm re-
lies on the assumption that the energy available at a
given time of the day is similar to the energy genera-
tion observed at the same time on the previous days.
The high prediction errors shown by EWMA when
sunny and cloudy days alternate is due to the high im-
pact that the weather conditions of the previous day
have when estimating the energy generation for the
current day. Weather-Conditioned Moving Average
(WCMA) (Piorno et al., 2009) prediction algorithm
avoids this effect by effectively taking into account
both the current and past-days weather conditions.
3 SYSTEM MODEL
Our system consists of two components (1) field de-
ployed sensor network (2) data center. The sensor net-
work consists of a network of platforms (e.g. buoys or
towers), which are large enough to house large solar
panels and bulky batteries and an embedded computer
to which multiple sensors (order of 30) are connected
either via serial or Bluetooth link. The computer runs
a low-power operating system and is equipped with
one or more network modalities (e.g, WiFi, cellular,
and satellite). Figure 1 shows our latest deployment
of an instrumented buoy for a lake monitoring ap-
plication. This buoys hosts a variety of sensor for
Figure 2: Interactive Context-Aware Power Management
System Architecture.
monitoring lake processes, including temperature at
twenty seven depths, dissolved oxygen, conductivity,
pH/ORP, flourescence sensors (Chloraphyll a, Blue-
green Algae, and Rhodamine WT) and voltage. These
sensors are connected to an Android Cell phone via
IOIO board. The phone runs the data acquisition pro-
gram and sends data back to a data center over the
cellular network. We use one Instapark 80W Mono-
crystalline solar panel as our green energy source (Ins,
2015). It has following power specifications: Maxi-
mum Power Voltage: 17.39V; Open Circuit Voltage:
21.97V; Maximum Power Current: 4.61A. Table 1
summarizes the sensing and communication and pro-
cessing power consumption, which we use in our sim-
ulations.
4 INTERACTIVE-POWER
MANAGEMENT
Our approach uses application-context (e.g., feedback
from domain scientists or an automated system run-
ning user-specified rules) to optimally set sensor sam-
pling rates. Figure 2 describes the proposed power
management framework that runs at each sensor node.
It consists of two major subsystems, namely, power
manager (PM) and and the Interactive Resource Al-
locator (IRA) subsystem. The PM subsystem makes
resource allocation decisions based on the current bat-
tery level and predicted harvesting level (ref. Eq (1)).
The IRA subsystem then adapts the aforementioned
sampling rate in an interactive manner (ref. Algo-
rithm 2). We now describe the details of PF and IRA
algorithms.
Each sensor node divides a time into K slots (Gor-
latova et al., 2011). We denote S = [s
1
,...,s
K
] as a set
of allocated energy to K time slots and s
i
is the allo-
cated energy to slot i. The embedded power manager
allocates energy to each time slot based on the current
batter level and predicted battery level (ref. Eq. (1)).
B(i) is battery level and H(i) is the predicted harvest
level at time slot i. We use B
max
to denote total Battery
capacity and B
min
to denote minimum battery capac-
An Interactive Context-aware Power Management Technique for Optimizing Sensor Network Lifetime
71

Algorithm 1: Advanced Progressive Filling (APF).
1 avgHarvstEnergy =
∑
K
i=1
H(i)/K ;
2 s(1 : K) := avgHarvestEnergy ;
3 for i = K; i ≥ 1;i = i − 1 do
4 [over, amount] ← check validity(s(i)) ;
5 if over == TRUE then
6 s(i) = s(i) − amount ;
7 end
8 end
9
10 Function [over, amount] = check validity(s)
11 B
current
= current battery level
12 for i = 1; i ≤ K; i = i + 1 do
13 B
current
← min{B(i) + Q(i) −s(i), B
max
} ;
14 if B
current
< s(i + 1) then
15 return [T RU E,s(i + 1) − B
current
] ;
16 end
17 end
18 return [FALSE,0] ;
ity. U(·) is utility function that calculates sampling
rate given allocated energy. It is a non-negative, in-
creasing, strictly concave function (Tutuncuoglu and
Yener, 2012). The first constraint of Eq. (1) obeys the
energy neutral operation in energy harvested wireless
sensor network(Kansal et al., 2007).
max
s
i
K
∑
i=1
U(s
i
)
s.t.B(i − 1) + H(i − 1) − s(i − 1) ≤ B(i)
0 ≤ s
i
≤ B
max
, 0 ≤ H(i), B
min
≤ B(i) ≤ B
max
(1)
In order to solve Eq. (1), PM allocates constant
energy over K time slots as described in Algorithm
1. The validity of this approach has been proved
by (Gorlatova et al., 2011)(Tutuncuoglu and Yener,
2012). This reduces the computational complexity of
PM to O(n) compared to that of PF O(n
2
).
However, constant energy allocation do not con-
sider a situation that system needs to consume more
energy than harvested one. Interactive resource allo-
cator (IRA) considere those scenario. We now de-
scribe the IRA subsystem. The sensor node virtu-
ally divides its battery into two parts, B
current
and
B
saved
. The IRA subsystem (ref. Algorithm 2) inter-
acts with the application (user or automated system)
and then calculates the energy required to meet the
requested sampling rate. Intuitively, when the energy
needed to satisfy the user request (s
req
) is less than
the energy allocated (s(i)) by the APF algorithm (sys-
tem is currently oversampling), IRA turns down the
current sampling rate and saves this extra energy to
B
saved
while achieving the necessary fidelity. How-
ever, when user requires sampling at higher rate than
the current sampling rate (the system is currently un-
der sampling), the sensor node augments B
current
with
Algorithm 2: Interactive Resource Allocator.
1 s ← Algorithm 1
2 for i = 1; i ≤ K; i = i + 1 do
3 s
req
← sampling rate given s(i) ;
4 if s
req
< s(i) then
5 // Support user request
6 s(i) ← s
req
;
7 B
saved
← B
saved
+ {s(i) −s
req
} ;
8 else
9 if s
req
< s(i) + B
saved
then
10 s(i) ← s
req
;
11 B
saved
= B
saved
− {s
req
− s(i)};
12 else
13 Aggressive : s(i) ← s
req
;
14 Conservative : s(i) ← s(i) ;
15 Hybrid : s(i) ← s(i) + B
saved
;
16 end
17 end
18 end
B
saved
to support it. When (s(i) + B
saved
< s
req
given
s(i) < s
req
), the system is under sampling because it
does not have enough energy to support the requested
sampling rate. In this case, we consider three policies
(1) Aggressive: The ongoing event is so critical that
the user sees benefit in capturing that even at the cost
of reduced network lifetime. In this case, the IRA
algorithm increases the sampling rate for the given
slot to the requested rate. (2) Conservative: IRA al-
gorithm decides to continue sampling at the current
sampling rate at the cost of reduced fidelity. (3) Hy-
brid policy: The system selects the best sampling rate
it can support in a greedy manner. This happens in
the case where although the requested rate is not fea-
sible due to energy constraints, but there is still bene-
fit in increasing the sampling rate to the level that can
be supported. A user monitors collected data and de-
termines current optimal sampling rate that meets the
science requirements. Sensor nodes receive the re-
quest and adjust their configuration based on onboard
power management technique (described later).
5 MATHEMATICAL ANALYSIS
In this section, we theoretically compare the perfor-
mance of interactive and non-interactive power man-
agement approaches in terms of user satisfaction. The
interactive approach makes its decision based on bat-
tery level, predicted harvesting energy, and user re-
quest, while the non-interactive approach typically
considers only the first two as its inputs. At a given
slot i, when the allocated energy (s(i)) is larger than
energy required to meet the user request (s
req
), a sen-
sor node can satisfy user request at that slot. However,
SENSORNETS 2016 - 5th International Conference on Sensor Networks
72

in this case, the node is oversampling and wasting its
energy.
z
i
=
1 i f s(i) ≥ s
req
0 i f s(i) < s
req
(2)
As shown in equation (2), z
i
defines the condition of
i’s time slot. When s(i) is larger than s
req
the z
i
has
1 which indicates that the system is oversampling and
spending extra energy. Otherwise z
i
has 0 as shown in
equation (2).
Let us define the probability p = Pr(s(i) ≥ s
req
).
The average number of slots in which a node spends
oversamples and wastes energy is given by equa-
tion (3). Thus, in this case, the average number of
time slots in which the non-interactive approach over-
spends energy in K · Pr (s
i
≥ x
i
).
E[Z
i
] = K · p = K · Pr(s(i) ≥ s
req
) (3)
The proposed interactive power manager (ref. Al-
gorithm 2) saves energy when the energy needed to
satisfy user request (s
req
) is less than allocated energy
(s(i)), and uses the saved energy (B
saved
) as a boost
when the energy needed to satisfy a user request is
more than allocated energy. The interactive approach
with hybrid policy fails to satisfy user requests only
when the sum of allocated and saved energy is lower
than the amount of user request, s(i) + B
saved
< s
req
.
We describe this in equation (4).
z
i
=
1 i f s(i) + B
saved
≥ s
req
0 i f s(i) + B
saved
< s
req
(4)
The s(i) + B
saved
≥ s
req
includes both s
i
≥ x
i
and
s(i)+ B
saved
≥ s
req
situations. Thus, the average num-
ber of time slots that satisfy user request with in-
teractive approach is K · {Pr(s(i) ≥ s
req
) + Pr(s(i) +
B
saved
≥ s
req
)}. This result means that user-interactive
power management always satisfies more user re-
quests than the non-interactive mechanism because
Pr(s(i) + B
saved
≥ s
req
) ≥ 0. The interactive approach
with conservative policy will show same performance
with non-interactive one and aggressive policy always
satisfies user satisfaction.
6 RESULTS
US climate Reference Network(USCRN), maintains
a database of environmental data collected from vari-
ous monitoring stations across the US. For our simu-
lations, for solar energy prediction, we use data from
USCRN database for Necedah, Wisconsin location
since it is the closest location to our deployment. Our
past research has shown that the state-of-the-art en-
ergy predictors such as Weather-Conditioned Moving
Average, WCMA can be used to accurately predict
the amount of harvesting energy (Piorno et al., 2009).
Therefore, in this paper we use WCMA algorithm for
solar energy prediction. To calculate accuracy, we
use one week worth of sensor data (Wind speed data)
from our deployment. We use Matlab to conduct sim-
ulations.
6.1 Study of Impact of Time Slot Length
Variations on Energy Efficiency
In this study, we consider 24 hours duration and vary
the time slot length from 1 (24 slots/day) hour to 24
hours (1 slot/day). We fix 1 sample per 10 min as de-
fault sampling rate. We consider user request pattern
from 10% to 100%. In the case of 10% request pat-
tern, among all time slots, 10% time slot support high
request rate which requires 1 sample every 1 min. Re-
maining request pattern requires 1 sample every 5min.
We use end point battery level as 11.1V. Thus, the
capacity is (12-11.1)*55 = 49.5Wh. Table 2 shows
percentage of energy consumed for each approach for
different time slot lengths and request patterns. As
expected (ref. Table 2), when we decrease request
frequency, the overall energy consumption decreases.
However, we observe an interesting patten when time
slot length is varied. When time slot length is be-
tween 1 hour to 6 hours, the environmental conditions
(for solar energy production) do not vary consider-
ably and the overall energy consumption goes up as a
function of slot length. However, for lengths greater
than 6 hours the environmental conditions within a
slot can vary significantly thereby changing the har-
vesting energy production (solar energy availability
during day-night shifts). This results in lower energy
consumption for 12 hours and 24 hours slot lengths as
compared to slots of 1, 2, 3, and 4 hours duration.
6.2 Study of Impact of EPV Variations
on Energy-efficiency
Our deployment uses Interstate DCM0055 Lead-Acid
battery (Int, ) with 55Ah capacity with Initial Bat-
tery Level (IBL) as 12V. The technical specification
for this battery mentions that there are five different
End Point Voltage (EPV) levels : 9.6V, 10.2V, 10.5V,
10.8V, 11.1V for this battery. When the battery level
reaches the EPV, it stops working until the recharge
process starts. We then calculate the available/ tar-
get battery capacity for each of the discharge levels
as: (IBL - EPV) * battery capacity. For example, for
9.5V EPL, the target battery capacity is: (12 - 9.6)* 55
= 132 Wh. It can be seen that the energy efficiency de-
creases as the application request ratio increases since
An Interactive Context-aware Power Management Technique for Optimizing Sensor Network Lifetime
73
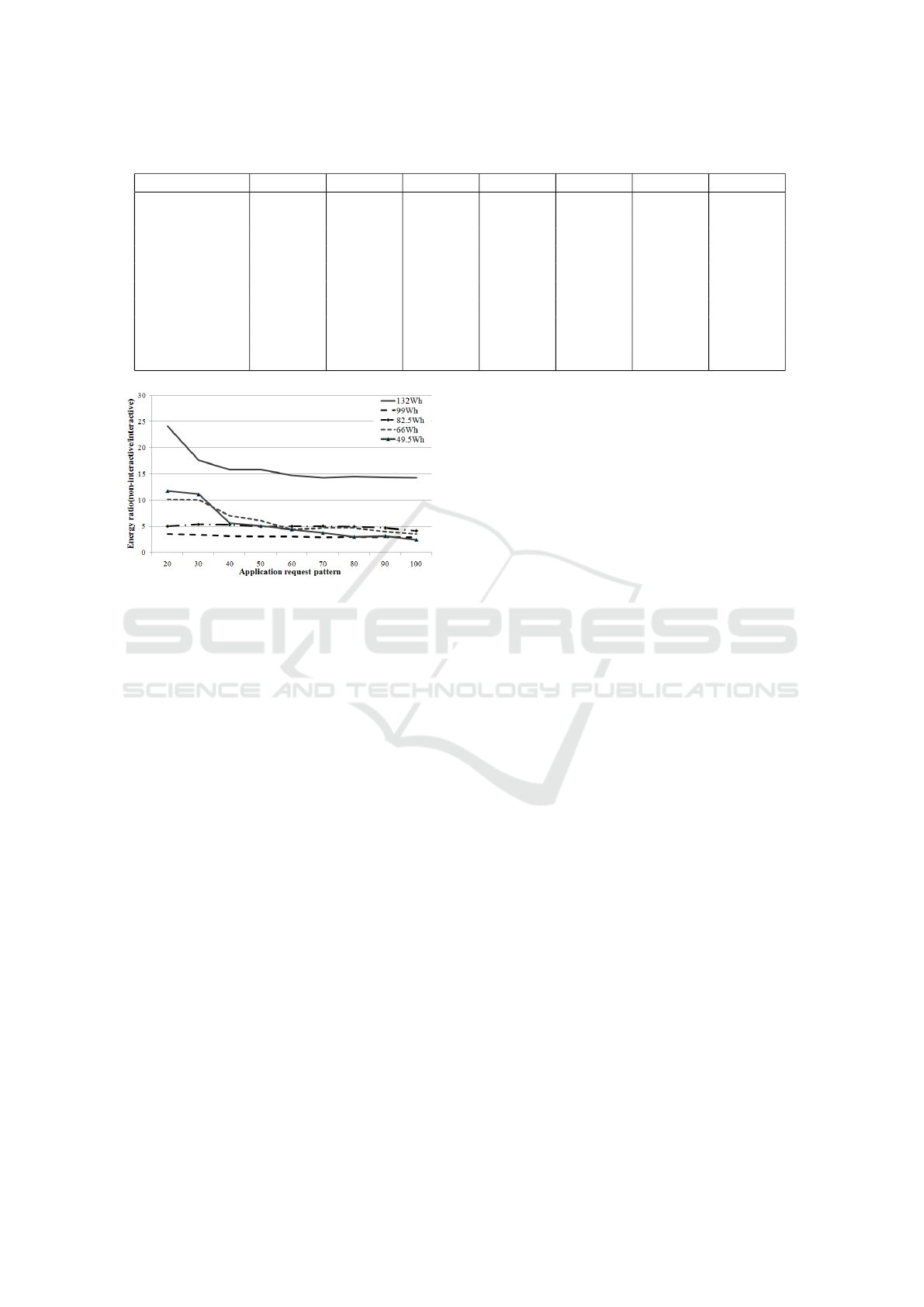
Table 2: Impact of time slot length and request pattern variations on energy efficiency.
Request pattern 1 hr 2 hr 3 hr 4 hr 6 hr 12 hr 24 hr
10% 0.956276 0.834421 0.830564 1.293239 0.899995 0.468826 0.375603
20% 1.457325 1.494519 1.417344 1.342128 1.193348 1.186236 0.448982
30% 1.677017 1.690152 1.821041 1.929334 2.073806 1.251442 0.889197
40% 2.178127 2.179191 2.187712 2.173487 2.440535 1.512372 1.109292
50% 2.508317 2.790583 2.554353 2.662568 2.513921 1.512403 1.402832
60% 3.106887 2.961605 2.884691 3.200636 3.174275 1.903787 1.622956
70% 3.302188 3.279281 2.994695 3.542866 3.541096 2.36027 2.063197
80% 3.607844 3.474945 3.654829 3.983248 4.201438 2.555879 1.916398
90% 3.950051 3.695036 3.801447 4.080857 4.054915 2.686218 2.430062
100% 4.206684 4.086216 4.241561 4.374419 4.275124 2.882064 2.28323
Figure 3: Impact of End Point Voltage variations on energy-
efficiency.
in our case each request needs higher sampling rate
(sampling every 1 minute). We can see that the pro-
posed interactive approach is significantly more en-
ergy efficient than the non-interactive approach. This
is because the later one allocates as much energy as it
can in a fair manner, which leads to oversampling and
wastage of energy. Figure. 3 also shows that higher
discharging rate cannot use the total capacity, 55Ah
because it draws high current. This situation is ex-
plained by Peukert’s Equation (Doerffel and Sharkh,
2006).
6.3 Study of Impact of Harvesting
Energy Variations on Energy
Efficiency and Accuracy
In this paper we employ WCMA (Piorno et al., 2009)
algorithm for solar energy prediction for the inter-
active and non-interactive approaches. Solar energy
availability varies significantly as a function of geo-
graphic location and season. To understand its im-
pact on the performance of our approach in this study
we consider solar energy variations during the win-
ter (2012/01/4 - 2012/01/10) season at three different
geographic locations in the United States, namely, 1)
Necedah, Wisconsin (44.0262, -90.0737), 2) Austin,
Texas (30.25, -97.75), and 3) Santa Barbara, CA
(34.425833, -119.714167). We set default sampling
interval to be 10 minutes and high request sampling
interval to be 1 minute.
Our results indicate that the proposed interactive
approaches are orders of magnitude more energy ef-
ficient than the non-interactive approach. In partic-
ular, Table 3 shows the the percentage of remaining
battery level after one week of operation. In case
of non-interactive approach it is just 0.8152% for the
Wisconsin winter case. The accuracy is expressed in
terms of Root Mean Square Error (RMSE). Note that
as shown Table 4 error of this approach is quite high
(RMSE = 2.3057). We calculated that PF algorithm
allocated energy to sample sensors every 17 seconds.
This is counterintuitive because the approach sam-
ples data at very high frequency (default sampling rate
for the interactive approach is every 10 minutes), but
it still its error is higher than all the interactive ap-
proaches. A careful investigation shows that PF ap-
proach sets it Target Battery Level (TBL) to the bat-
tery end point voltage (9.6V). It will try to allocate
maximum energy during each time slot in a fair man-
ner. However, this includes the stored and harvesting
energy. They assume an ideal solar prediction algo-
rithm that always predicts the harvesting energy ac-
curately. However, WCMA, the state-of-the-art solar
energy prediction algorithm has a relative mean error
of only 10%. When we plug-in this realistic solar en-
ergy prediction algorithm with the non-interactive al-
gorithm, we see that during the one week of operation,
the batter level goes below the end point level (target
battery level) for approximately 11% of the slots. The
system then stops operating thereby completely miss-
ing the sampling opportunities in those slots. In con-
trast, the interactive approaches avoid oversampling
when not needed thereby saving the energy to allow
higher sampling rates upon request. We also observe
that the geographic locations did not have any major
impact on the energy efficiency or the accuracy of the
studied protocols.
SENSORNETS 2016 - 5th International Conference on Sensor Networks
74
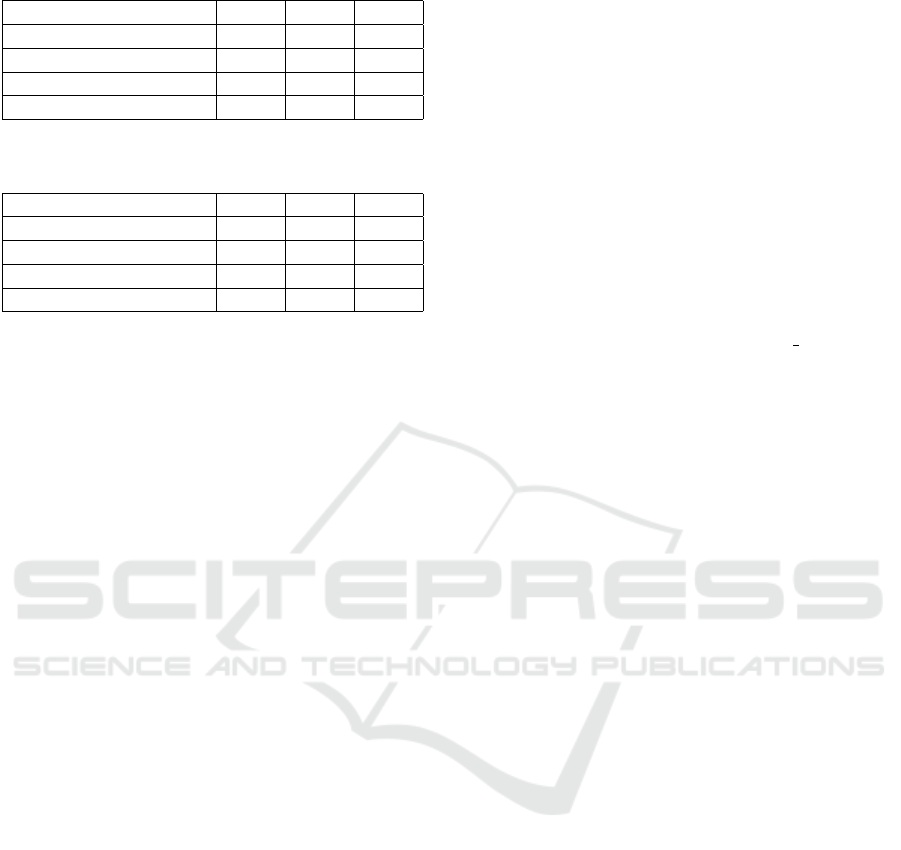
Table 3: Percentage of remaining battery after 1 week.
WI CA TX
Non-interactive 0.815 0.981 1.795
Interactive-conservative 99.92 99.92 99.94
Interactive-aggressive 99.83 99.83 99.86
Interactive-hybrid 99.89 99.89 99.91
Table 4: Impact of harvesting energy variations on system
accuracy.
WI CA TX
Non-interactive 2.305 2.498 2.132
Interactive-conservative 1.08 1.08 0.08
Interactive-aggressive 0.01 0.015 0.01
Interactive-hybrid 1.100 1.100 1.100
7 CONCLUSION
The state-of-the-art energy allocation algorithm that
takes into account current battery level and harvest-
ing energy strives to fairly allocate as much energy
as possible along the time dimension. This approach
by not considering application-context leads to very
high and uniform sampling rates. However, sampling
the environment at fixed predefined intervals is nei-
ther possible (need to accommodate system failures)
nor desirable (sampling rate might not capture an im-
portant event with desired fidelity). To that end, in this
paper we propose a novel interactive power manage-
ment technique that adapts sampling rate as a function
of both application-level context (e.g., user request)
and system-level context (e.g harvesting energy avail-
ability). Our simulations use sensor data and system
specifications (battery and solar panel specs, sensing
and communication costs) for a real sensor network
deployment. Existing interactive algorithm considers
an ideal solar energy prediction algorithm that makes
no prediction errors. However, by plugging-in a real-
istic solar energy prediction algorithm, we show that
the existing approach often leads to draining the bat-
tery below the end point voltage thereby resulting in
lower accuracy while spending high energy (due to
high sampling rate). Our results show that the pro-
posed approach saves significant amounts of energy
compared by avoiding oversampling when applica-
tion does not need it and uses this saved energy to
support sampling at high rates to capture event with
necessary fidelity when needed. The computational
complexity of our approach is lower (O(n)) than the
state-of-the-art non-interactive energy allocation al-
gorithm (O(n
2
)).
ACKNOWLEDGEMENTS
This work was supported in part by the TerraSwarm
Research Center, one of six centers supported by the
STARnet phase of the Focus Center Research Pro-
gram (FCRP) a Semiconductor Research Corpora-
tion program sponsored by MARCO and DARPA.
This work also has been funded by NSF OCI Award
1219504 and a grant from the Gordon and Betty
Moore Foundation.
REFERENCES
Dcm005 batter specification. https://www.
interstatebatteries.com/content/product info/specs/
dcm0055.%pdf.
(2013). Creon, the coral reef environmental observatory
network. http://www.coralreefeon.org.
(2015). Gleon, the global lake ecological observatory net-
work. http://www.gleon.org.
(2015). Instapark solar panel. http://www.instapark.com/
solar-power-panels.
Cerpa, A., Elson, J., Estrin, D., Girod, L., Hamilton, M.,
and Zhao, J. (2001). Habitat monitoring: Application
driver for wireless communications technology. vol-
ume 31, pages 20–41, New York, NY, USA. ACM.
Chang, M. and Bonnet, P. (2010). Meeting ecologists’ re-
quirements with adaptive data acquisition. In Pro-
ceedings of the 8th ACM Conference on Embedded
Networked Sensor Systems, SenSys, pages 141–154,
New York, NY, USA. ACM.
Chen, J., Cao, X., Cheng, P., Xiao, Y., and Sun, Y.
(2010). Distributed collaborative control for indus-
trial automation with wireless sensor and actuator net-
works. volume 57, pages 4219–4230.
Doerffel, D. and Sharkh, S. A. (2006). A critical review
of using the peukert equation for determining the re-
maining capacity of lead-acid and lithium-ion batter-
ies. volume 155, pages 395 – 400.
Gorlatova, M., Wallwater, A., and Zussman, G. (2011). Net-
working low-power energy harvesting devices: Mea-
surements and algorithms. In INFOCOM, Proceed-
ings IEEE, pages 1602–1610.
Haque, M., Matsumoto, N., and Yoshida, N. (2009).
Context-aware multilayer hierarchical protocol for
wireless sensor network. In Sensor Technologies and
Applications, SENSORCOMM. Third International
Conference on, pages 277–283.
Hui, J. W. and Culler, D. (2004). The dynamic behavior of
a data dissemination protocol for network program-
ming at scale. In Proceedings of the 2nd International
Conference on Embedded Networked Sensor Systems,
SenSys, pages 81–94, New York, NY, USA. ACM.
Kansal, A., Hsu, J., Zahedi, S., and Srivastava, M. B.
(2007). Power management in energy harvesting sen-
sor networks. volume 6, New York, NY, USA. ACM.
An Interactive Context-aware Power Management Technique for Optimizing Sensor Network Lifetime
75

Koo, B., Won, J., Park, S., and Eom, H. (2009). Paar: A
routing protocol for context-aware services in wireless
sensor-actuator networks. In Internet, AH-ICI. First
Asian Himalayas International Conference on, pages
1–7.
Levis, P. and Culler, D. (2004). The firecracker protocol. In
Proceedings of the 11th Workshop on ACM SIGOPS
European Workshop, EW 11, New York, NY, USA.
ACM.
Mainwaring, A., Culler, D., Polastre, J., Szewczyk, R., and
Anderson, J. (2002). Wireless sensor networks for
habitat monitoring. In Proceedings of the 1st ACM
International Workshop on Wireless Sensor Networks
and Applications, WSNA, pages 88–97, New York,
NY, USA. ACM.
Naik, V., Arora, A., Sinha, P., and Zhang, H. (2007). Sprin-
kler: A reliable and energy efficient data dissemina-
tion service for extreme scale wireless networks of
embedded devices. volume 6, pages 777–789.
Piorno, J., Bergonzini, C., Atienza, D., and Rosing, T.
(2009). Prediction and management in energy har-
vested wireless sensor nodes. In Wireless Commu-
nication, Vehicular Technology, Information Theory
and Aerospace Electronic Systems Technology, Wire-
less VITA. 1st International Conference on, pages 6–
10.
Tutuncuoglu, K. and Yener, A. (2012). Optimum trans-
mission policies for battery limited energy harvesting
nodes. volume 11, pages 1180–1189.
Wood, A., Stankovic, J., Virone, G., Selavo, L., He, Z., Cao,
Q., Doan, T., Wu, Y., Fang, L., and Stoleru, R. (2008).
Context-aware wireless sensor networks for assisted
living and residential monitoring. volume 22, pages
26–33.
Zhou, H.-Y. and Hou, K.-M. (2007). Civic: An power-
and context-aware routing protocol for wireless sensor
networks. In Wireless Communications, Networking
and Mobile Computing, 2007. WiCom 2007. Interna-
tional Conference on, pages 2771–2774.
SENSORNETS 2016 - 5th International Conference on Sensor Networks
76
