
Detecting People in Large Crowded Spaces using 3D Data from Multiple
Cameras
∗
Jo
˜
ao Carvalho
1
, Manuel Marques
1
, Jo
˜
ao Paulo Costeira
1
and Pedro Mendes Jorge
2
1
Institute for Systems and Robotics (ISR/IST), LARSyS, Instituto Superior T
´
ecnico, Univ. Lisboa, Lisbon, Portugal
2
ISEL - Instituto Polit
´
ecnico de Lisboa, Lisbon, Portugal
Keywords:
3D Point Cloud, Depth Camera, Multiple Cameras, Human Detection, Human Classification.
Abstract:
Real time monitoring of large infrastructures has human detection as a core task. Since the people anonymity
is a hard constraint in these scenarios, video cameras can not be used. This paper presents a low cost solution
for real time people detection in large crowded environments using multiple depth cameras. In order to detect
people, binary classifiers (person/notperson) were proposed based on different sets of features. It is shown that
good classification performance can be achieved choosing a small set of simple feature.
1 INTRODUCTION
Automatic human detection through 3D camera data
is a core problem in many contexts. Examples are
surveillance, human-robot interaction and human be-
haviour analysis. In this paper, it is proposed a
methodology with depth cameras for people detec-
tion in large crowded spaces while maintaining the
anonymity. The detection should be done in real time
and without using color information, in order to pre-
serve anonymity. These constraints are requested by
the real world scenario: the monitoring of waiting
queues and passages on an airport. Furthermore, the
characteristics of the areas to cover imply the use of
multiple depth cameras. The presented strategy seg-
ments candidates from the cameras data and classifies
them into person or non-person. The procedure was
tested on a labelled dataset with several subsets of fea-
tures, in order to find one that requires low computa-
tional effort while still achieving good results.
1.1 Related Work
Extensive literature is available regarding human de-
tection on RGB images (Moeslund et al., 2006). In
(Mikolajczyk et al., 2004), the authors propose a
method to detect people by using multiple body parts
∗
Carvalho, Marques and Costeira were supported by the
Portuguese Foundation for Science and Technology through
the project LARSyS - ISR [UID/EEA/50009/2013]. Jorge
was supported by SMART-er LISBOA-01-0202-FEDER-
021620/SMART-er/QREN.
detectors. A widely used approach to detect humans
in color images is to use the Histogram of Oriented
Gradients (HOG) descriptor (Dalal and Triggs, 2005).
To compute it, a given region of an image is divided
into a number of cells and for each cell the gradi-
ent of its pixels is computed. The resulting gradi-
ents are then integrated into a histogram. To avoid
the exhaustive process of sliding windows in search
of candidates, several methods have been proposed to
efficiently identify relevant regions of an image, such
as (Zhu et al., 2006). Stereo camera systems have
also allowed to achieve good results by estimating the
depth of the covered areas (Ess et al., 2009).To add
the three-dimensional information to video images,
the integration with laser range finders has been fre-
quently studied (Arras et al., 2007).
With the appearance of cheap depth cameras, such
as the Asus Xtion
1
, it became easy to merge color and
3D information in RGB-D images. Several methods
have been proposed to perform human detection with
such data. In (Spinello and Arras, 2011), the authors
propose the Histogram of Oriented Depth (HOD) de-
scriptor and combine it with the HOG descriptor, with
an approach that implies each frame to be exhaus-
tively scanned for people, implying a GPU implemen-
tation for real time usage. An alternative method is
proposed in (Mitzel and Leibe, 2011), where the peo-
ple detection is performed only in a set of regions of
interest (ROI). However, the process of finding these
1
http://www.asus.com/3D-Sensor/Xtion PRO/
specifications/
218
Carvalho, J., Marques, M., Costeira, J. and Jorge, P.
Detecting People in Large Crowded Spaces using 3D Data from Multiple Cameras.
DOI: 10.5220/0005727702180225
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 4: VISAPP, pages 218-225
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

regions requires a GPU implementation. In (Munaro
et al., 2012), it is proposed a fast solution to detect
people within groups using the depth data. The can-
didates found are filtered by computing the HOG fea-
tures of the RGB region corresponding to the candi-
dates. A similar approach is proposed in (Liu et al.,
2015), where the segmentation is also done using the
3D data followed by classification using a histogram
of height difference and a joint histogram of color and
height.
The methods referred all have the color informa-
tion as an important part of the detection or classi-
fication procedure. However, there are cases where
privacy and identity protection should be enforced.
In such cases, RGB cameras must be avoided to pre-
vent easy identification of the subjects involved. Work
has been proposed that uses only the depth informa-
tion. In (Xia et al., 2011), a two-stage head detec-
tion process is employed, with a first stage where a
2D edge detector finds a first set of candidates in the
depth image, which are then selected using a 3D head
model. The contour of the body is then extracted
with a region growing algorithm. In (Bondi et al.,
2014), the heads are detected by applying edge detec-
tion techniques to the depth images. The heads detec-
tion can be also achieved in a probabilistic approach
(Lin et al., 2013). In (Hegger et al., 2013), the 3D
data is divided in several layers according to its height
and clustered using euclidean clustering. Each clus-
ter is then classified using the histogram of local sur-
face features and the clusters merged using connected
components, with a final stage of classification of the
merged clusters. In (Choi et al., 2013), the authors
present a method to segment the depth image using a
graph-based algorithm to determine ROIs. The HOD
descriptor is then computed for each ROI and classi-
fied with a linear SVM. Other solution, (Brscic et al.,
2013), uses low cost depth cameras and high resolu-
tion laser range finders for large scale infrastructures.
1.2 Outline
The outline of the proposed method is presented on
Figure 1. The segmentation procedure is described in
Section 3. Section 4 presents the set of features ex-
tracted from each candidate. Afterwards, on Section
5, the classification methods tested on this work are
presented. Section 6 presents the labelled dataset cre-
ated for this work. The results obtained are exposed
Figure 1: Methodology Outline. Three steps: segmentation,
feature extraction; classification.
(a) Camera approximate setup
(b) A 3D point-cloud of the covered area
Figure 2: Waiting queue area camera setup: (a) approximate
camera locations and field of view; (b) a 3D point-cloud of
the covered area.
on Section 7, followed by the future work and con-
clusions. Following, one presents the waiting queue
scenario, camera setup and its challenges.
2 REAL SCENARIO
CHALLENGES
To monitor the area of interest, one needs to com-
pute several metrics, some of which require the full
coverage of the space. Given the limited field of
view (FOV) and range of depth cameras, this implies
the use of multiple cameras. However, although one
needs to completely cover the area, the overlap be-
tween cameras should be left to minimum, in order to
avoid the degradation of the data by the interference
of overlapping infrared patterns. Additionally, with
limited and low height locations to place the cameras,
several challenges are raised.
Figure 2(a) roughly illustrates the placement and
FOV of the depth cameras used to cover our real
world environment, a waiting queue area in a trans-
portation infrastructure. Figure 2(b) presents a point
cloud of the space captured without people. Note
the visible zig-zag queue guides. The cameras re-
quired accurate calibration to ensure that the transi-
tion of people from one camera to another would be
as “smooth” as possible. Very good intrinsic param-
eters are required to guarantee that the cameras re-
port the depth information as close as possible to the
true depth. Given a proper set of intrinsic parame-
ters, cameras require extrinsic calibration to ensure
that the relative pose of the cameras is as close as pos-
sible to the true value. However, even with a good
Detecting People in Large Crowded Spaces using 3D Data from Multiple Cameras
219

(a) Frontal view (b) Top view (c) Top view at
5.3m (data from
two cameras)
Figure 3: Point-cloud of a person: (a) frontal view (of points
with height above 1.30m) at about 3.3m from the camera;
(b) top view on the same location as in (a); (c) top view on
an area covered by two cameras, both at about 5.3m. The
data points of each camera are presented in different colors.
calibration, the point clouds from overlapping cam-
eras will never match perfectly, leading to much nois-
ier/fuzzier data. Additionally, the cameras used, Asus
Xtion PRO, have a maximum specified depth range
of 3.5m. In practice, however, to ensure full cover-
age, the depth data was used up to 5.5m. One should
note that as distance increases, the camera loses pre-
cision and the data becomes noisier. Moreover, the
ceiling of the area had a low height and the cam-
eras were fixed at 2.3m from the ground. Having to
cover a distance of 5.5m from the mounting point,
this easily leads to severe occlusion of the people in
the queue. Figure 3(a) presents the point cloud of the
frontal view a person (only points with height above
1.30m) as viewed by a single camera at about 3.30m
from the camera. Figure 3(b) presents the same per-
son, at the exact same position but viewed from the
top. Finally, Figure 3(c) presents the point-cloud of
the same person from the top view on an area covered
by two cameras. The point-cloud is now much more
scattered and hardly (if) recognisable as a person pro-
file. Therefore, this setup leads to point clouds of very
occluded people or fuzzy point clouds.
3 DATA SEGMENTATION
This section presents the strategy used for the 3D
point cloud segmentation. This procedure was orig-
inally inspired by the method described in (Munaro
et al., 2012).
It should be noted that prior to the segmenta-
tion process, background subtraction is applied to the
depth images and the 3D data is transformed to the
global reference frame.
To illustrate the segmentation process, consider
the depth image in Figure 4(a) and the point cloud of
the closest foreground points, Figure 4(b). Having the
3D points in a global reference plane, the algorithm it-
eratively searches for the highest point and fits a fixed
sized box around that point. This encloses/clusters
(a) Depth image (b) Partial point cloud
Figure 4: Example of a depth image and partial point cloud:
(a) presents a depth image form the camera on exit 1; (b)
presents the point cloud of closest foreground points.
the surrounding points within the box. Afterwards,
the clustered points are removed from the cloud and
the procedure is iteratively repeated until no further
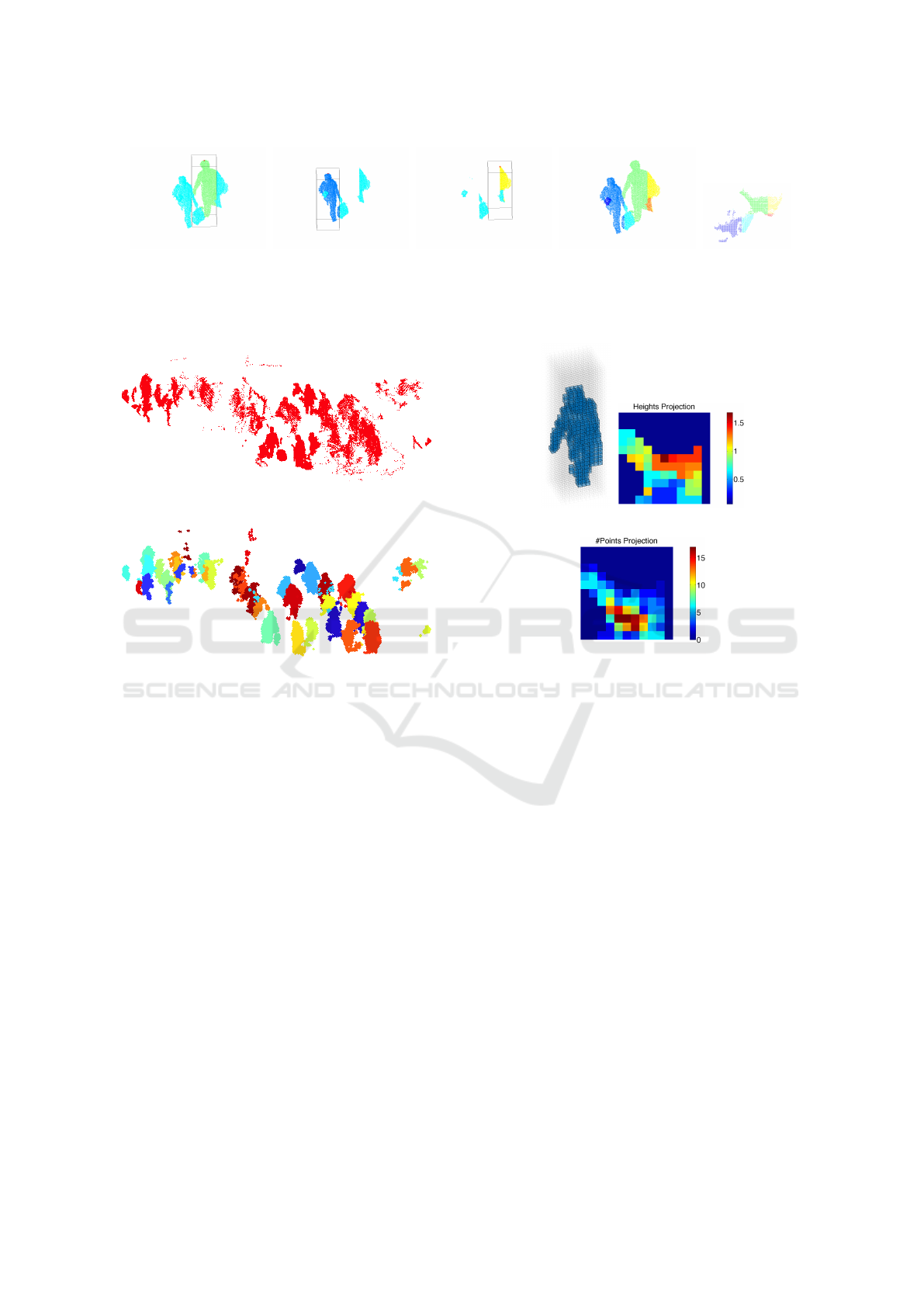
points are left to cluster. Figures 5(a) to 5(c) present
the first three steps of the process and Figure 5(d)
presents the final segmentation results, with one color
per cluster. The goal of iterating through points of
maximum height is that those points will be good can-
didates to “top of the head point” and a rough cen-
troid of a person. By using a fixed size box, one is
assuming that a person occupies a maximum volume
and that people keep a certain minimum distance from
each other. In the presented example, despite success-
fully segmenting the two perceptible people (green
and bigger blue clusters), another four clusters are ex-
tracted. Therefore, a classification strategy must be
used to filter the candidates.
Finally, note that while iterating through points of
maximum height, one only considers those points to
be a valid head point if it has a minimum number of
points bellow itself. This allows to further filter out
spurious high points that might degrade the segmen-
tation results.
Figure 6 presents a point cloud of the waiting
queue with several people and the result of applying
the segmentation procedure. Each cluster is displayed
with a unique color, although very similar colors ex-
ist.
4 FEATURE EXTRACTION
In order to successfully classify candidate clusters, a
set of relevant features must be extracted from the
point clouds. Having the requirement to segment and
classify dozens of point clouds in real-time, features
should be computationally light. Computation of nor-
mal vectors of points, principal component analysis,
(Hastie et al., 2009), or computationally demanding
procedures as such, can not be used.
The first features to extract from a candidate point
cloud are the simplest features computed in this work:
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
220
(a) Step 1 (b) Step 2 (c) Step 3 (d) Final (e) Final -
topview
Figure 5: Segmentation example: (a) to (c) frontal view of the first three steps of the segmentation process with box and
highest point in red; (d) frontal view of the point cloud final segmentation; (e) top view of the point cloud final segmentation.
(a) Point cloud to segment
(b) Segmented point cloud
Figure 6: Example of the segmentation results for the wait-
ing queue point cloud: (a) point cloud prior to segmenta-
tion; (b) segmented point cloud, one color per cluster (very
similar colors exist).
the number of points of each cluster; the height of the
cloud, i.e., the height of the highest point; and the area
occupied by a cloud when its points are projected into
the ground. Following, to account for the shape of
the point cloud, a vector of features resulting directly
from the segmentation is built. This is what one de-
fines as voxels. For each segmented cluster, fit a fixed
size box, centered exactly on its highest point. Af-
terwards, the box is divided by a regular grid, where
each cell of that grid, a voxel, is set to one if at least
one data point is in it and zero otherwise. For this
work, the box has dimensions 0.66m ∗0.66m ∗2.1m.
Figure 7(a) presents an example of a voxelized point
cloud with a voxel matrix of 11 ∗11 ∗35, i.e., with
0.06m size voxel. This grid of voxels is then vector-
ized and used as feature vector.
Other features to be used are the ground projec-
tion of the heights and the ground projection of the
number of points. Both projections are represented
by a 11 ∗11 matrix, dimensions equal to the first two
(a) (b)
(c)
Figure 7: Feature examples: (a) voxels; (b) heights projec-
tion on the ground; (c) number of points projection on the
ground.
dimensions of the voxel grid. The number of points
(in fact, number of voxels) projection is the sum of
the voxel cells along the third dimension of the grid
(recall that voxel cells have 0/1 value). Figure 7(c)
presents such a matrix. On the heights projection,
each cell of the matrix contains the height of the high-
est point falling into that cell, Figure 7(b). Similarly,
to the voxels, these matrix are vectorized to be used
as feature vector.
Finally, a more complex descritor is computed,
the Ensemble of Shape Functions (ESF), proposed
in (Wohlkinger and Vincze, 2011). It considers dis-
tances between pairs of sampled points, angles be-
tween lines formed by three sampled points and areas
of triangles built using randomly sampled points.
In summary, the full set of features is:
• number of points;
• height;
• area;
• heights projection;
• number of points
projection;
• voxels;
• ESF.
Detecting People in Large Crowded Spaces using 3D Data from Multiple Cameras
221

5 CLASSIFICATION METHODS
This section presents the two classifiers tested for this
human detection procedure, the Support Vector Ma-
chine (SVM), (Cortes and Vapnik, 1995), and the
Random Forest (RF), (Breiman, 2001).
5.1 Support Vector Machine
A support vector classifier is a binary classification
method that computes a hyperplane to separate obser-
vation points from two distinct classes. The goal is to
find the hyperplane to which the distance between the
observation points and the hyperplane is maximum.
The computation of this hyperplane is done by solv-
ing the optimization problem
max
β
0
,β,ε
1
,...,ε
N
M
s.t. y
i
(β
0
+ β
T
x
i
) ≥ M(1 −ε
i
)
||β|| = 1
ε
i
≥ 0
N
∑
i=1
ε
i
≤C,
for all i ∈ {1,...,N}. M is the separating margin, ε
i
are the slack variables and C is a non-negative con-
stant. By forcing the last constraint, one is impos-
ing a bound on the margin and hyperplane violations.
Therefore, if C = 0 no margin violation is allowed.
When C is small, the margin is small and rarely vio-
lated. When C is large, the margin is wider and more
violations are allowed. The C parameter is normally
chosen through cross-validation (CV).
On this work, besides the linear classification on
the original feature space, one also maps the features
to a higher-dimensional space by using a SVM with a
gaussian kernel:
K(x, ˜x) = exp
−γ||x − ˜x||
2
.
For further information on SVM, refer to (Cortes and
Vapnik, 1995) and (Hastie et al., 2009).
5.2 Random Forests
Random forests is a method based on decision trees,
(Breiman, 2001). Decision trees are capable of cap-
turing complex structures in data and have relatively
low bias. However, they are noisy, suffering from
high variance. Random forests improve decision trees
by reducing their variance and consequently decreas-
ing their error rate. This is achieved by decreasing
the correlation between trees, training each tree with
(a) (b) (c)
Figure 8: Example of an observation per person class: (a)
complete person observation, sideways, with backpack; (b)
waist up person observation, frontal view; (c) shoulders up
person observation, slightly sideways.
different subset of the data points and by randomly
selecting a subset of features at each node split.
RF allow the estimation the generalization error
without using CV. The observations not used in the
training of a tree are called out-of-bag (OOB) obser-
vations. For each point in the dataset, one can select
the trees in which the point was OOB and get the clas-
sification of that point for each of those trees and get
a final result through majority vote. The OOB classi-
fication error can be computed by applying this pro-
cedure to every point on the dataset. It can be shown
that the OOB error is equivalent to the leave-one-out
cross-validation error for sufficiently large number of
trees.
Another interesting characteristic of the RF is the
capability of assessing feature importance. After the
RF training, to compute the importance of a particu-
lar feature, one randomly permutes the values of that
feature across the OOB points and recomputes the er-
ror. The diference in the classification accuracy from
the original OOB points and the permuted ones gives
a measure of importance of the feature.
For further information on RF, refer to (Breiman,
2001) and (Hastie et al., 2009).
6 DATASET LABELLING
A dataset was built for this work by manually la-
belling segmented point clouds. To perform the la-
belling, the data was visually inspected. The raw data
of the dataset, acquired at an airport, consists of im-
ages from eight depth cameras. Seven from the area
presented on Figure 2 and an additional one from a
close area. The 3D point clouds were computed from
these images, segmented and merged on a global ref-
erence frame. Although the point clouds could have
been labelled separately for each camera, the intent
was to use the data as it was used on the referred
project, with overlapping areas.
Although in this work only two classes are con-
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
222

sidered for classification, person or non-person, the
point clouds were labelled in four classes: complete
person, waist up person, shoulders up person and non-
person. The reason is that there exists frequent oc-
clusion when the space is crowded, and by labelling
people depending on their visibility one can more eas-
ily inspect classification results and hopefully under-
stand better in which cases the classifier fails. Fig-
ure 8 presents and observation from each of the per-
son classes. Please note that for training the classi-
fiers, these three classes were merge into a unique
one. Note also that the dataset is noisy. People can
be observed from several views, from the front, from
the back, sideways or something in-between. Also, as
previously referred, the point clouds get noisier with
the distance from the cameras as on the areas where
the data from multiple cameras overlap.
A total of 1345 point clouds were labelled, with
542 non-people, 545 complete body people, 183 waist
up people and 75 shoulders up people.
7 EXPERIMENTAL RESULTS
As referred in the previous section, the three person
classes were merged into a unique one. To balance the
dataset, the observations corresponding to complete
body people were down sampled such that the total
number of person observations matches the number
of non-people.
From this dataset, the features described in Sec-
tion 4 were computed and applied standardization to
all of them. Also, features with null standard devia-
tion (features equal for all points on the dataset) were
removed. With these features, several subsets were
built to train the classifiers:
• f1: {heights, number of points, areas} ∈ R
3
;
• f2: {heights projection} ∈ R
121
;
• f3: {number of points projection} ∈ R
121
;
• f4: {f1, f2, f3} ∈ R
245
;
• f5: {voxels} ∈ R
3390
;
• f6: {ESF} ∈ R
612
;
• f7: {f4, f5, f6} ∈ R
4247
.
The purpose of this feature separation into several
subsets is to assess their performance versus all the
features, f7. For each subset, training was done for a
SVM with linear kernel, a SVM with gaussian kernel
and a random forest.
For training and validation purposes, the dataset
was divided into training and test data, with 759 ob-
servations (∼ 70%) and 325 observations, respec-
Table 1: Training CV error rates for the linear SVM
(LSVM), gaussian SVM (GSVM) and OOB error rate for
the RF. The subset of features to which the classifier had
lower error is in bold type.
CV Error OOB Error
LSVM GSVM RF
f1 0.0501 0.0408 0.0461
f2 0.0514 0.0435 0.0422
f3 0.0988 0.0738 0.0646
f4 0.0277 0.0303 0.0343
f5 0.0382 0.0290 0.0343
f6 0.0856 0.0896 0.0725
f7 0.0264 0.0290 0.0369
Table 2: Classification error rates for the training and test
datasets. The subset of features to which the classifier had
lower error is in bold type. The lowest error for the test
dataset is underlined.
Test Data Error
LSVM GSVM RF
f1 0.0554 0.0554 0.0400
f2 0.1077 0.0923 0.0585
f3 0.1015 0.0677 0.0554
f4 0.0462 0.0523 0.0338
f5 0.0400 0.0400 0.0400
f6 0.0831 0.0862 0.0492
f7 0.0431 0.0277 0.0246
tively. The SVMs were trained with 5-fold cross-
validation in order to compute the best parame-
ters for the classifier. For the linear kernel, one
tested a total of 20 logarithmically spaced values
of C ∈ [10
−5
,10
5
]. For the gaussian kernel, one
tested 10 values for C ∈ [10
−2
,10
7
] and 10 values for
γ ∈ [10
−6
,10
1
]. The parameters with lowest cross-
validation error were chosen as the best ones and used
to evaluate the model on the test dataset. The random
forest was trained with 250 decision trees and
√
p fea-
tures chosen at each node split.
For testing the SVM classifiers, one used the
MATLAB toolkit PMTK3
2
. For building the RFs, it
was used the Statistics and Machine Learning Tool-
box for MATLAB. All the features were implemented
in MATLAB, with the exception for the ESF. The ESF
is implemented in the PCL library (Rusu and Cousins,
2011).
Table 1 reports, for all feature sets, the CV error
of each SVM “winning” model and the OOB error
for the RF with 250 trees. The linear SVM (LSVM)
achieves the lowest CV error, 0.0264, when using all
the features, f7, but obtains a very close error for f4.
For the gaussian SVM (GSVM), the best training re-
2
https://github.com/probml/pmtk3 - PMTK3 webpage.
Last accessed on August 26, 2015.
Detecting People in Large Crowded Spaces using 3D Data from Multiple Cameras
223
sults are obtained for f5 and f7, with 0.0290 of error.
For the random forests (RF), the lowest OOB error
is obtained for f4 and f5, with 0.0343, but with close
results for f7.
Table 2 presents the classification error rate of
each classifier and set of features for the test obser-
vations. The three classifiers had the exact same er-
ror rate for f4, however, for all the other subsets the
RF outperformed the SVM classifiers. The best re-
sult was obtained using f7, with a 0.0246 error rate.
The LSVM performed best for f4, with 0.0400 error
rate, and the GSVM for f7, close to the RF result, with
0.0277.
Besides the lower error for the test dataset, the RF
classifier has the advantage of being simple to train
and not prone to overfitting (James et al., 2013). With
RFs, assuming m =
√
p as proposed by the authors,
one only has to choose the number of trees to train.
On the other hand, with the SVM, one has to choose
a kernel, choose a range of values for the classifier
and kernel parameters and use cross-validation to find
the best values. Depending on the kernel used and
number of parameter values tested, this can lead to
long training times. For instance, with f7, the training
of the RF took 14.13s of cpu time, while the SVMs
took 83.18s and 1743.22s for the linear and gaussian
kernels, respectively.
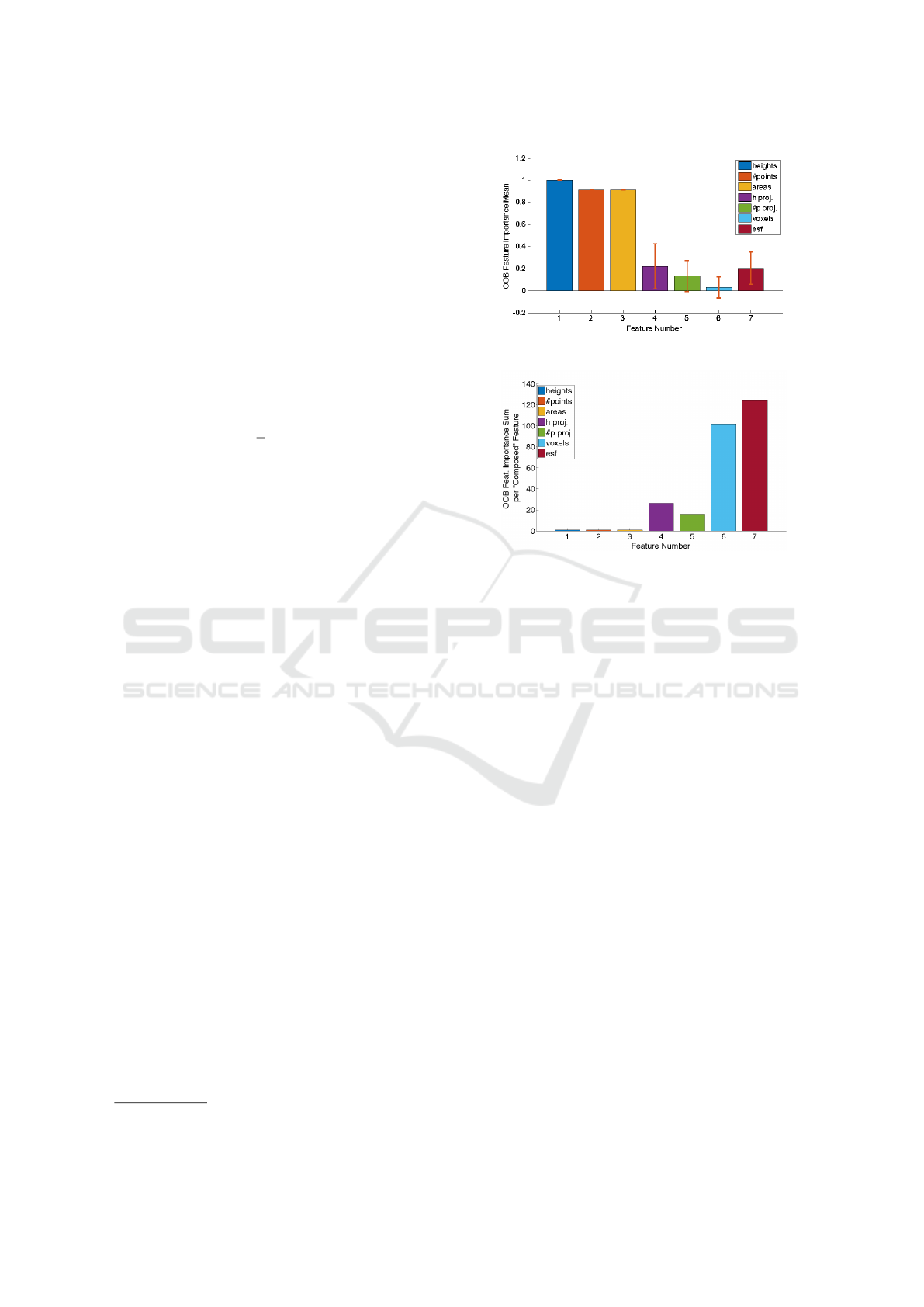
While training the RF for the f7 feature set, the
OOB feature importance was recorded. The three
simplest features, i.e., heights, number of points and
areas, are exactly the features with higher importance,
with 1, 0.9115 and 0.9119, respectively
3
. One should
note that this tool evaluates the importance of each
feature space dimension individually and that only
these first three dimensions can be seen as individ-
ual. All the other dimensions of the space are part of
“composed” features, such as the voxels or the ESF.
So, even if the most important features are the three
referred, the composed features end up having more
importance when all of its dimensions are summed.
Figure 9(b) presents the sum of feature importance
by composed feature. One can see that the composed
feature that has higher “summed” oob importance is
the ESF. This comes a litle surprising as the ESF (f6)
is far from being the best feature subset according to
Table 2. From this one can conclude that even if the
sum of the importante of a composed feature is much
higher than some other feature, that does not neces-
sarilly mean that the composed feature will lead to
lower error rates. Figure 9(a) presents the mean of
the OOB feature importance for each composed fea-
ture. One can easilly understand that if one is to use
a small number of features, the heights, the number
3
Values normalized by the maximum importance value.
(a)
(b)
Figure 9: OBB Feature importance: (a) mean per “com-
posed” feature set; (b) summed per “composed” feature set.
of points and the area are the ones to use. The voxels
have the lowest mean, as many of its cells have neg-
ative importance, meaning they lead to the decrease
of the accuracy. There are also zero importance cells,
cells that made no difference in the classification or
were never tested for node splitting.
The testing data set was formed by 159 non-
person observations, 91 complete body observations,
53 waist up observations and 22 shoulders up obser-
vations. For each of these subclasses, the best LSVM
misclassified 4.40%, 4.40%, 3.77% and 0%, respec-
tively. The GSVM misclassified 3.77%, 1.10%,
3.77% and 0%. The RF misclassified 2.52%, 3.30%,
1.89% and 0%. These results show that, contrary to
what could be expected, the classifiers do not present
significant differences in misclassification percentage
between the point clouds corresponding to occluded
and non-occluded people. Further, the observations
from people visible only from the shoulders up were
all correctly classified.
To achieve real time performance, the segmen-
tation and feature extraction procedures were im-
plemented in C. The candidates are classified by a
Python RF implementation (Pedregosa et al., 2011).
The segmentation and classification procedures take
around 0.2ms per person, for the f1. It must be
noted that the segmentation implementation is not op-
timized and further improvements can be achieved.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
224

8 CONCLUSIONS
This paper presented a low-cost solution for human
detection in large infrastructures while preserving
people identity. Real time performance is achieved by
using a small set of simple features. It was presented
a real scenario in which multiple depth cameras are
simultaneously used to monitor the environment. The
method uses the merged data from the cameras and
finds candidates by segmenting the resulting 3D point
cloud. For each candidate, a set of features is ex-
tracted. Several subsets of features were tested to as-
sess their performance when used as input to a classi-
fier. The proposed classifier lies on features with low
computational cost and achieves good performance in
a real time scenario.
As future work, it would be interesting to explore the
creation of confidence regions on the FOV of each
camera to account for the accuracy degradation with
the distance.
ACKNOWLEDGEMENTS
The authors would like to thank Jo
˜
ao Mira, Thales
Portugal S.A. and ANA Aeroportos de Portugal for
enabling the data acquisition within the SMART-er
project and Susana Brand
˜
ao by providing the ESF
MATLAB wrapper.
REFERENCES
Arras, K. O., Mozos,
´
O. M., and Burgard, W. (2007). Us-
ing boosted features for the detection of people in 2d
range data. In IEEE ICRA, pages 3402–3407. IEEE.
Bondi, E., Seidenari, L., Bagdanov, A. D., and Del Bimbo,
A. (2014). Real-time people counting from depth im-
agery of crowded environments. In Advanced Video
and Signal Based Surveillance (AVSS), 11th IEEE In-
ternational Conference on, pages 337–342. IEEE.
Breiman, L. (2001). Random forests. Machine learning,
45(1):5–32.
Brscic, D., Kanda, T., Ikeda, T., and Miyashita, T. (2013).
Person tracking in large public spaces using 3-d range
sensors. Human-Machine Systems, IEEE Transac-
tions on, 43(6):522–534.
Choi, B., Meric¸li, C., Biswas, J., and Veloso, M. (2013).
Fast human detection for indoor mobile robots us-
ing depth images. In IEEE ICRA, pages 1108–1113.
IEEE.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine learning, 20(3):273–297.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In IEEE CVPR Com-
puter Society Conference on, volume 1, pages 886–
893. IEEE.
Ess, A., Leibe, B., Schindler, K., and Van Gool, L. (2009).
Moving obstacle detection in highly dynamic scenes.
In IEEE ICRA, pages 56–63. IEEE.
Hastie, T., Tibshirani, R., and Friedman, J. (2009). The
elements of statistical learning.
Hegger, F., Hochgeschwender, N., Kraetzschmar, G. K.,
and Ploeger, P. G. (2013). People detection in 3d
point clouds using local surface normals. In RoboCup
2012: Robot Soccer World Cup XVI, pages 154–165.
Springer.
James, G., Witten, D., Hastie, T., and Tibshirani, R. (2013).
An introduction to statistical learning. Springer.
Lin, W.-C., Sun, S.-W., and Cheng, W.-H. (2013). Demo
paper: A depth-based crowded heads detection sys-
tem through a freely-located camera. In IEEE ICME
Workshops, pages 1–2. IEEE.
Liu, J., Liu, Y., Zhang, G., Zhu, P., and Chen, Y. Q. (2015).
Detecting and tracking people in real time with rgb-d
camera. Pattern Recognition Letters, 53:16–23.
Mikolajczyk, K., Schmid, C., and Zisserman, A. (2004).
Human detection based on a probabilistic assembly
of robust part detectors. In Computer Vision-ECCV,
pages 69–82. Springer.
Mitzel, D. and Leibe, B. (2011). Real-time multi-person
tracking with detector assisted structure propagation.
In IEEE ICCV Workshops, pages 974–981. IEEE.
Moeslund, T. B., Hilton, A., and Kr
¨
uger, V. (2006). A sur-
vey of advances in vision-based human motion cap-
ture and analysis. Computer vision and image under-
standing, 104(2):90–126.
Munaro, M., Basso, F., and Menegatti, E. (2012). Tracking
people within groups with rgb-d data. In IEEE/RSJ
IROS International Conference on, pages 2101–2107.
IEEE.
Pedregosa, F., Varoquaux, G., Gramfort, A., Michel, V.,
Thirion, B., Grisel, O., Blondel, M., Prettenhofer,
P., Weiss, R., Dubourg, V., Vanderplas, J., Passos,
A., Cournapeau, D., Brucher, M., Perrot, M., and
Duchesnay, E. (2011). Scikit-learn: Machine learning
in Python. Journal of Machine Learning Research,
12:2825–2830.
Rusu, R. B. and Cousins, S. (2011). 3D is here: Point Cloud
Library (PCL). In IEEE ICRA, Shanghai, China.
Spinello, L. and Arras, K. O. (2011). People detection in
rgb-d data. In IEEE/RSJ IROS International Confer-
ence on, pages 3838–3843. IEEE.
Wohlkinger, W. and Vincze, M. (2011). Ensemble of shape
functions for 3d object classification. In IEEE RO-
BIO International Conference on, pages 2987–2992.
IEEE.
Xia, L., Chen, C.-C., and Aggarwal, J. K. (2011). Human
detection using depth information by kinect. In IEEE
CVPR Workshops Computer Society Conference on,
pages 15–22. IEEE.
Zhu, Q., Yeh, M.-C., Cheng, K.-T., and Avidan, S. (2006).
Fast human detection using a cascade of histograms of
oriented gradients. In IEEE CVPR Computer Society
Conference on, volume 2, pages 1491–1498. IEEE.
Detecting People in Large Crowded Spaces using 3D Data from Multiple Cameras
225
