
Detection of Abnormal Gait from Skeleton Data
Meng Meng
1
, Hassen Drira
1
, Mohamed Daoudi
1
and Jacques Boonaert
2
1
T
´
el
´
ecom Lille, CRIStAL (UMR CNRS 9189), Lille, France
2
Ecole des Mines de Douai, Douai, France
Keywords:
Joint Distances, Abnormal Gait, Spatio Temporal Modeling.
Abstract:
Human gait analysis has becomes of special interest to computer vision community in recent years. The
recently developed commodity depth sensors bring new opportunities in this domain.In this paper, we study
the human gait using non intrusive sensors (Kinect 2) in order to classify normal human gait and abnormal
ones. We propose the evolution of inter-joints distances as spatio temporal intrinsic feature that have the
advantage to be robust to location. We achieve 98% success to classify normal and abnormal gaits and show
some relevant features that are able to distinguish them.
1 INTRODUCTION
The human activity analysis is a challenging theme
due to the motion’s complexity and diversity. At the
same time, the recent improvement of of low cost
depth cameras with real-time capabilities such as Mi-
crosoft Kinect have been employed and in a wide
range of applications, including human-computer in-
terfaces, smart surveillance, quality-of-life devices
for elderly people, assessment of pathologies, re-
habilitation, and movement optimization in sport
(A. A. Chaaraoui and Flrez-Revuelta, 2012). Current
methods for human action classification in this field
have moved towards more structured interpretation of
complex human activities involving abnormal gait in
various realistic scenarios.
Due to the interpretation of human behavior have
obtained successfully from (J. Shotton et al., 2011),
researchers have explored different compact represen-
tations of human actions recognition and detection in
recent years. The release of the low-cost RGBD sen-
sor Kinect has brought excitement to the research in
computer vision, gaming, gesture-based control, vir-
tual reality, especially gait analysis. There are several
works(Omar and Liu, 2013)(R. Slama and Srivastava,
2015)(M. Devanne et al., 2013) relied on skeleton in-
formation and developed features based on depth im-
ages for human motion. Some works made use of
skeleton joint positions to generate their features such
as(Dian and Medioni, 2011). They proposed a spatio-
temporal model STM to analyze skeleton sequential
data. Then using alignment algorithm DMW calcu-
lated the similarity between two multivariate time se-
ries. Based on STM and DMW, they achieved view-
invariant action recognition on videos. Meanwhile
the work (W. Li and Liu, 2010) presented a study on
recognizing human actions from sequences of depth
maps. They have employed the concept of BOPs in
the expandable graphical model framework to con-
struct the action graph to encode the actions. Each
node of the action graph which represents a salient
postures is described by a small set of of representa-
tive 3D points sampled from the depth maps.
Now human abnormal gait detection attracts more
concern for earlier detection of human diseases. In the
sense, the present research aims to apply the recent
improvements in human gait analysis based on low-
cost RGB-D devices. The method (A. Paiement et al.,
2014) analyzed the quality of movements from skele-
ton representations of the human body. They used
a non-linear manifold learning to reduce the dimen-
sions of the noisy skeleton data. Then building a sta-
tistical model of normal movement from healthy sub-
jects, and computing the level of matching of new ob-
servations with this model on a frame-by-frame basis
following Markovian assumptions. Both of (J. Snoek
et al., 2009) and (G. S. Parra-Dominguez and Mihai-
lidis, 2012) analyzed the abnormal gait from skele-
tons information. (J. Snoek et al., 2009) used monoc-
ular RGB images to track of the feet by using a mixed
state particle filter, and computed two different sets
of features to classify stairs descents using a hidden
Markov model. In this work(G. S. Parra-Dominguez
and Mihailidis, 2012), they used binary classifiers of
Meng, M., Drira, H., Daoudi, M. and Boonaert, J.
Detection of Abnormal Gait from Skeleton Data.
DOI: 10.5220/0005722901310137
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 133-139
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
133

harmonic features to detect abnormalities in stairs de-
scents from the lower joints of Kinect’s skeletons.
Along similar lines, (C. Alexandros and Fl
´
orez-
Revuelta, 2015) detected joint motion history feature
based on RGB-D devices and used the BagOfKey-
Poses to classify temporal feature sequences for ab-
normal gait detection. They also recorded their
own dataset for abnormal gait detection by Microsoft
Kinect 2 camera. We use the dataset to test our ap-
proach.
We propose in this paper an approach for dy-
namic abnormal gait detection using frame-based fea-
ture and a memory of k previous frames. For k = 0,
we achieve the recognition without any memory of
previous frames. We demonstrate that the use of few
distances can be enough for his classification prob-
lem.
The rest of the paper is organized as follows. Sec-
tion 2 presents the spatio-temporal modeling of dy-
namic skeleton data. The features used for encoding
the data, the classification method and an overview
of the proposed approach are detailed in this section.
Section 3 presents experimental results, discusses the
relevant features generated by proposed method, then
the conclusion and future works are given in the Sec-
tion 4.
2 OUR APPROACH
The 3-D humanoid skeleton can be extracted from
depth images (via RGB-D cameras, such the Mi-
crosoft kinect) in real-time thanks to the work of Shot-
ton et al. (J. Shotton et al., 2011). This skeleton con-
tains the 3-D position of a certain number of joints
representing different parts of the human body and
provides strong cues to recognize abnormal gait de-
tection. We propose in this paper to recognize human
abnormal gait based on the inter skeleton joints dis-
tances in each frame.
2.1 Overview of Our Method
An overview of the proposed approach is given in
Fig.1. We first use skeleton position information from
dataset. Then, a feature vector based on all the skele-
ton joints is calculated for each frame. Next the fea-
ture vectors of n successive frames are concatenated
together to build the feature vector for the sliding win-
dow. Finally, the abnormal gait detection is performed
by Random Forest classifier.
Figure 1: Overview of our method. Three main steps are
shown.
2.2 Intrinsic Features
In order to have real time approach, one needs to use
frame-based features. These features have to be in-
variant to pose variation of the skeleton but discrimi-
native for abnormal gait detection. We propose to use
the inter-joints distances.
Then we obtained our new skeleton information
that is donated as S which contains 20 joints from the
original data .
S =
{
j
1
, j
2
,..., j
20
}
V refers to the set of the pairwise distances be-
tween the joint a and joint b from S.
V =
{
d(a,b)
}
,a ∈ S,b ∈ S
Thus the feature vector is composed by the all
pairwise distances between the joints The size of this
vector is equal to m × (m − 1)/2, with m = 20 : 20
joints.
2.3 Dynamic Shape Deformation
Analysis
To capture the dynamic of skeleton deformations
across sequences, we consider the inter-joint dis-
tances computed at n successive frames. In order to
make possible to come to the recognition system at
any time and make the recognition process possible
from any frame of a given video, we consider sub-
sequences of n frames as sliding window across the
video.
Thus, we chose the first n frames as the first
sub-sequence. Then, we chose n-consecutive frames
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
134

starting from the second frame as the second sub-
sequence. The process is repeated by shifting the
starting index of the sequence every one frame till the
end of the sequence.
The feature vector for each sub-sequence is built
based on the concatenation of individual features of
the n frames of the sub-sequence.
Thus, each sub-sequence is represented by a fea-
ture vector of size the number of distances for one
frame times the size of the window n. For the sliding
window of size n ∈ [1, L ] that begins at frame i, the
feature vector is:
x = [V
i
,V
i+1
,...,V
i+n−1
],
with L the length of the sequence.
For n = 1, our system is equivalent to recogni-
tion frame by frame without any memory of previous
frames. If n = L, the length of the video, our system
will provide only one decision at the end of the video.
The effect of the size of the window on the perfor-
mance is studied later in experimental part.
2.4 Random Forest-based Real Time
Human Action Interaction
For the classification task we used the Multi-class
version of Random Forest algorithm. The Random
Forest algorithm was proposed by Leo Breiman in
(Breiman, 2001) and defined as a meta-learner com-
prised of many individual trees. It was designed to
operate quickly over large datasets and more impor-
tantly to be diverse by using random samples to build
each tree in the forest. Diversity is obtained by ran-
domly choosing attributes at each node of the tree and
then using the attribute that provides the highest level
of learning. Once trained, Random Forest classify a
new action from an input feature vector by putting it
down each of the trees in the forest. Each tree gives a
classification decision by voting for that class. Then,
the forest chooses the classification having the most
votes (over all the trees in the forest). In our exper-
iments we used Weka Multi-class implementation of
Random Forest algorithm by considering 100 trees.
3 HUMAN ABNORMAL GAIT
DETECTION ON DGD
DATASET (DAI GAIT DATASE)
3.1 Dataset and Experimental Protocol
The DAI gait dataset(C. Alexandros and Fl
´
orez-
Revuelta, 2015) is collected in recording a front view
of a corridor which contains seven subjects walk to-
wards the camera normally and abnormal gait. This
dataset have two types of anomalies which are knees
injured and feet dragged performed by the right and
the left leg respectively. So there are four different ab-
normal gait types. With other four normal instances,
each of the seven subjects made of 56 sequences to-
tally. We report some skeleton frames from DGD
dataset in Fig.2. All of the videos are captured by
Kinect 2. The experimental setting is the same as
in (C. Alexandros and Fl
´
orez-Revuelta, 2015) which
employed 20 of the available joints, discarding the fin-
gers and a redundant joint of the torso (SpineShoul-
der). Fig.3 shows the joints order of DAI gait dataset.
3.2 Experimental Results and
Comparison to State-of-the-art
We selected two abnormal and two normal sequences
of each subject randomly as training set which con-
tains 28 sequences. The remaining of the dataset is
testing set. We compare our approach with the state-
of-the-art methods on the cross-subject test setting.
Table. 1 lists the results of our approach and re-
sult of the state of the art(C. Alexandros and Fl
´
orez-
Revuelta, 2015) based on DAI gait dataset. How-
ever, our protocol is different from the protocol used
in (C. Alexandros and Fl
´
orez-Revuelta, 2015). Ac-
tually, in (C. Alexandros and Fl
´
orez-Revuelta, 2015),
the authors did the training on normal sequences and
detect the abnormal ones among the test sequences.
Whereas, our training set includes also some abnor-
mal sequences.
Using a sliding window of size 37 to 42, Alexan-
dros et al. (C. Alexandros and Fl
´
orez-Revuelta, 2015)
reported 98% F1-measure. We report 81% recogni-
tion rate using only one frame, 94.23% using a slid-
ing window of 42 frames and 98.47% using a sliding
window of 60 frames.
3.3 Effect of the Temporal Size of the
Sliding Windows
Fig.4 In order to study the effect of size of the sliding
window, we report the classification results using sev-
eral values of the window size as illustrated in Fig.4.
One can see that the more frames we use in the win-
dow, the better the result is. Using only 37 frames,
the recognition rate is 90%. It reaches 94.23% and
97.01% for window size 42 and 50 respectively. Us-
ing 60 frames in the sliding window, the recognition
rate is 98.47
Detection of Abnormal Gait from Skeleton Data
135
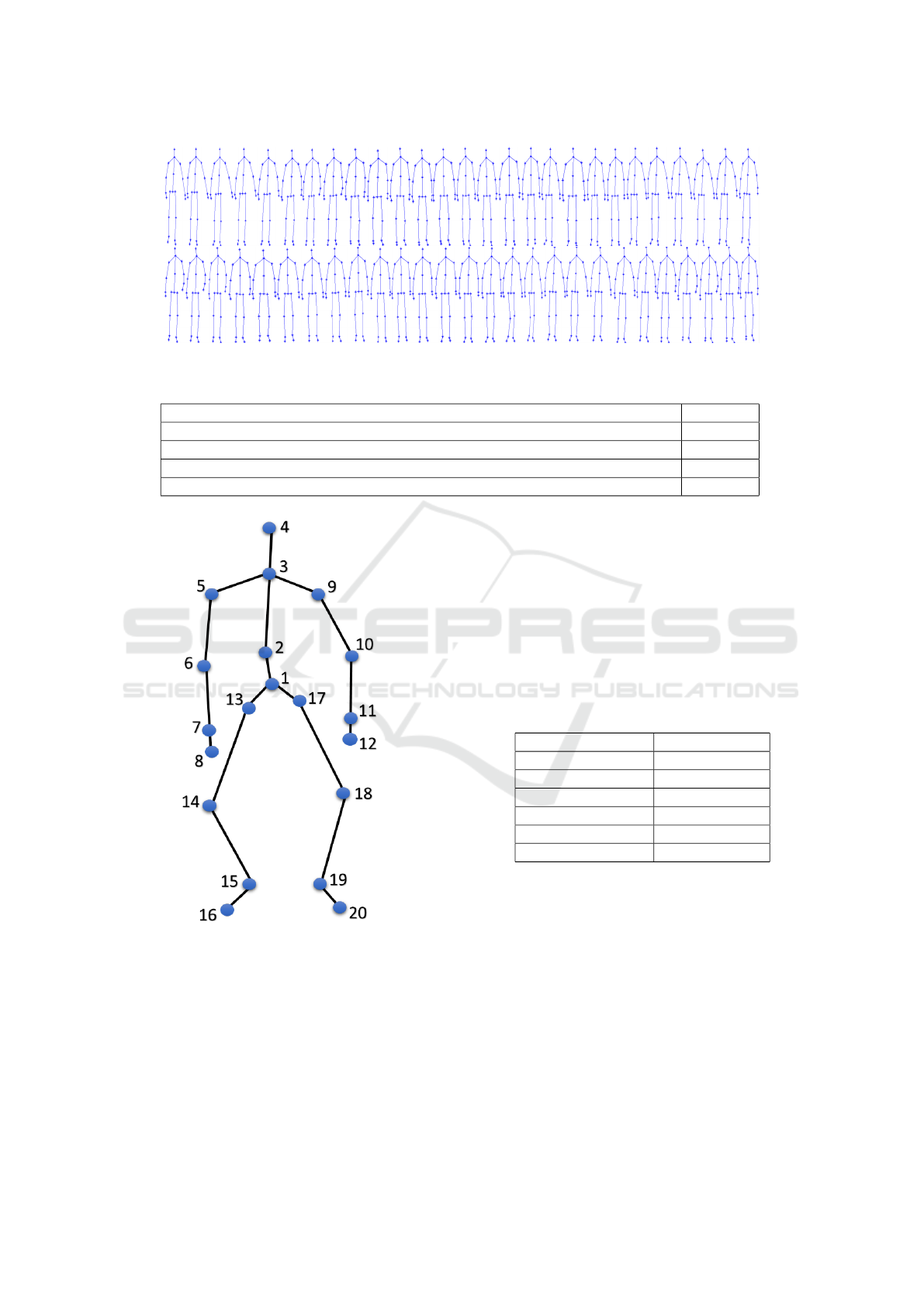
Figure 2: Some skeleton frames of right knee injured abnormal gait from DAI gait dataset.
Table 1: Reported results Comparison to state of the art.
Method Accuracy
Joint Motion History Features (37,42)(C. Alexandros and Fl
´
orez-Revuelta, 2015) 98%
Our approach (without memory) 81%
Our approach (with 42 frames) 94.23%
Our approach (with 60 frames) 98.47%
Figure 3: Joints Order of DAI gait dataset.
3.4 Relevant Features
The proposed approach is based on a feature vector
of 190 inter joints distances per frame. One impor-
tant question is are some distances more relevant than
others to classify normal and abnormal gaits? Can one
do this binary classification (normal versus abnormal)
using only one distance? We investigate these ques-
tions and report classification results based on indi-
vidual distances. We show in Table.2 some classifica-
tion results based on one distance which has a mem-
ory with 40 frames. The distances number 170 is able
to classify normal and abnormal gaits with a success
of 92.18%. The classification results based on dis-
tances 171, 178,188 and 184 are respectively 92%,
89.83%, 93.09% and 97.15%. The distance 179 re-
port a success of 98.46% which is better than the re-
sult reported using all the distances together.
Table 2: Selected features recognition rate.
Number of features recognition rate
No.170 92.18%
No.171 92%
No.178 89.83%
No.179 98.46%
No.184 97.15%
No.188 93.09%
We report in Fig.5 and Fig.6 an illustration of
the most relevant distances for normal-abnormal gait
classification. As illustrated in these figures, the
most relevant distances correspond to the distance be-
tween the knee and the foot of the same leg (distance
No.171), the distance between knee and the foot of
the other leg (distance No.178), the distance between
the feet from different legs (distance No.184) and the
distance between ankles (distance No.179). This re-
sult is in agreement with the data as the 4 abnormal
types in the dataset are:
• RKI: Right knee injury (cannot bend the right
knee, starting with left foot)
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
136

Figure 4: Effect of the temporal size of the sliding window on the results. The classification rates increase when increasing
the length of the temporal window.
Figure 5: Illustration of distances No.171 and No.178 from
DAI gait Dataset.
• LKI: Left knee injury (cannot bend the left knee,
starting with right foot)
• RFD: Right foot dragging (dragging right leg,
starting with left foot)
• LFD: Left foot dragging (dragging left leg, start-
ing with right foot)
In order to better understand the behavior of the
relevant distances, we computer the mean normal dis-
tance No.179 (distance between right and left ankles)
and the mean abnormal one. We show previously that
the classification of normal-abnormal gaits using only
this distance is better than one based on all distances.
Fig.7 shows the evolution of the mean of this distance
in both normal and abnormal cases. One can see that
the mean distance is bigger in general in the abnormal
case and it includes more oscillations than the normal
one. It is clear that the variation of this distance is
more stable in the normal case.
Figure 6: Illustration of distances No.179 and No.184 from
DAI gait Dataset.
3.5 Leave-one-actor-out Experiments
We did leave-one-actor-out experiments on DAI gait
dataset. For each time, we selected all kinds of ac-
tions of one subject as testing set and the rest of the
dataset as training set. In total, we have 7 subjects
so we did the same experiments seven times. At last,
we obtained the mean recognition rate of the seven
results. Now we can see the performance of each
subject without memory, with 42 frames and with 60
frames as shown in Table.3.
Detection of Abnormal Gait from Skeleton Data
137
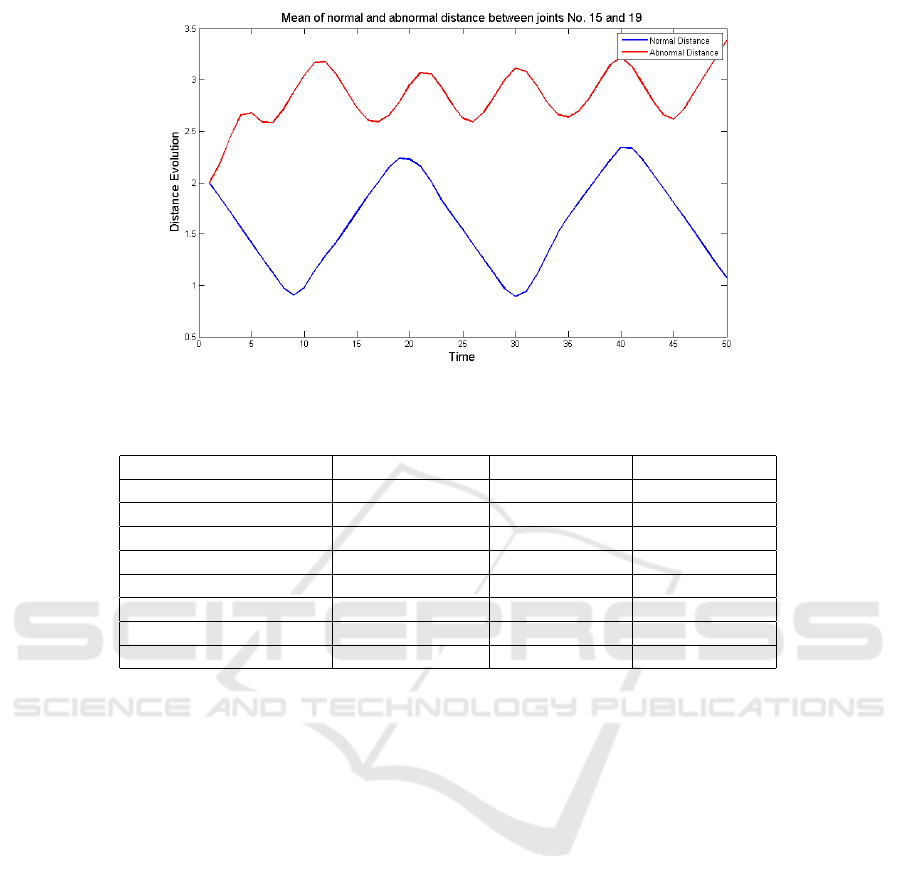
Figure 7: The mean distance of abnormal and normal gait between joints No.15 and 19.
Table 3: Leave-one-actor-out Experiments.
The number of subject without memory with 42 frames with 60 frames
Subject 1 69.9% 88.12% 100%
Subject 2 65.36% 72.99% 88.26%
Subject 3 80.49% 96.58% 100%
Subject 4 66.57% 90.35% 99.12%
Subject 5 77.1% 89.35% 98.43%
Subject 6 77.53% 90.32% 100%
Subject 7 75.41% 93.36% 100%
Mean Recognition Rate 73.19% 88.72% 97.97%
4 CONCLUSIONS
In this paper we propose a spatio-temporal model-
ing of the skeleton data based on inter-joint distances
for normal and abnormal gaits classification. The
proposed features are discriminative enough to clas-
sify abnormal and normal human actions. We report
98.47% recognition rate and show that some distances
related to the knees, ankles and the feet are more rele-
vant than other distances. Future work will be focused
on more features to be able to distinguish the different
types of abnormal gaits.
REFERENCES
A. A. Chaaraoui, P. C.-P. and Flrez-Revuelta, F. (2012).
A review on vision techniques applied to human be-
haviour analysis for ambient-assisted living. In Expert
Systems with Applications, 39(12):1087310888.
A. Paiement, L. Tao, S. H., Camplani, M., Damen, D., and
M.Mirmehdi (2014). Online quality assessment of hu-
man movement from skeleton data. In Proceedings of
British Machine Vision Conference (BMVC).
Breiman, L. (2001). Random forests. In Machine Learning,
vol. 45, pp 5-32.
C. Alexandros, J. P.-L. and Fl
´
orez-Revuelta, F. (2015). Ab-
normal gait detection with rgb-d devices using joint
motion history features.
Dian, G. and Medioni, G. (2011). Dynamic manifold warp-
ing for view invariant action recognition. In IEEE In-
ternational Conference on Computer Vision (ICCV).
G. S. Parra-Dominguez, B. T. and Mihailidis, A. (2012). 3d
human motion analysis to detect abnormal events on
stairs. In In International Conference on 3D Imag-
ing, Modeling,Processing, Visualization and Trans-
mission, pages 97103.
J. Shotton, A. Fitzgibbo, M. C., Sharp, T., Finocchio, M.,
Moore, R., Kipman, A., and Blake, A. (June 2011).
Real-time human pose recognition in parts from single
depth images. In Proc. of IEEE Conf. on Computer
Vision and Pattern Recognition.
J. Snoek, J. Hoey, L. S., Zemel, R. S., and Mihailidis, A.
(2009). Automated detection of unusual events on
stairs. In Image and Vision Computing, vol. 27, no.
1-2, pp. 153 166,.
M. Devanne, H. Wannous, S. B., Daoudi, M., and Bimbo,
A. (2013). Space-time pose representation for 3d hu-
man action recognition. In New Trends in Image Anal-
ysis and Processing ICIAP 2013.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
138

Omar, O. and Liu, Z. (2013). Hon4d: Histogram of ori-
ented 4d normals for activity recognition from depth
sequences. In IEEE Conference on Computer Vision
and Pattern Recognition (CVPR).
R. Slama, H. Wannous, M. D. and Srivastava, A. (2015).
Accurate 3d action recognition using learning on the
grassmann manifold. In Pattern Recognition 48.2 :
556-567.
W. Li, Z. Z. and Liu, Z. (2010). Action recognition based
on a bag of 3d points. In IEEE Computer Vision and
Pattern Recognition Workshops (CVPRW)).
Detection of Abnormal Gait from Skeleton Data
139
