
Fast Gait Recognition from Kinect Skeletons
Tanwi Mallick, Ankit Khedia, Partha Pratim Das and Arun Kumar Majumdar
Department of Computer Science and Engineering, Indian Institute of Technology, Kharagpur 721302, India
Keywords:
Gait Recognition, Kinect Skeleton Stream.
Abstract:
Recognizing persons from gait has attracted attention in computer vision research for over a decade and a
half. To extract the motion information in gait, researchers have either used wearable markers or RGB videos.
Markers naturally offer good accuracy and reliability but has the disadvantage of being intrusive and expensive.
RGB images, on the other hand, need high processing time to achieve good accuracy. Advent of low-cost depth
data from Kinect 1.0 and its human-detection and skeleton-tracking abilities have opened new opportunities
in gait recognition. Using skeleton data it gets cheaper and easier to get the body-joint information that can
provide critical clue to gait-related motions. In this paper, we attempt to use the skeleton stream from Kinect
1.0 for gait recognition. Various types of gait features are extracted from the joint-points in the stream and
the appropriate classifiers are used to compute effective matching scores. To test our system and compare
performance, we create a benchmark data set of 5 walks each for 29 subjects and implement a state-of-the-art
gait recognizer for RGB videos. Tests show a moderate accuracy of 65% for our system. This is low compared
to the accuracy of RGB-based method (which achieved 83% on the same data set) but high compared to
similar skeleton-based approaches (usually below 50%). Further we compare execution time of various parts
of our system to highlight efficiency advantages of our method and its potential as a real-time recogniser if an
optimized implementation can be done.
1 INTRODUCTION
Human gait is an important indicator of health and
serves as an identification mark for an individual. It
was first studied by the biologists because it can pro-
vide great information about health, with applications
ranging from diagnosis, monitoring, and rehabilita-
tion. However, now it is also accepted as unique iden-
tifier for an individual and so can be considered for
identification and authentication of an individual.
In this paper, we try to use Kinect
1
1.0 for de-
tecting the gait of an individual. There are various
systems available for gait analysis like wearable sen-
sors, marker-based systems and Kinect is the latest
technique in this race. However each has got its own
pros and cons and their usage can be judged accord-
ing to the context. The marker-based systems are the
most accurate system used for gait analysis but they
are generally very costly and can be used only in lab-
oratory or controlled environments. Then comes the
wearable sensors which are cheap, small, lightweight,
mobile but they are intrusive, that is, the subject has to
1
Kinect for XBox One. has been released a while after
this work was completed. This is called Kinect 2.0 now.
wear those sensors. Also they must account for signal
drift and noise and must be placed correctly.
The latest sensor used for gait analysis is Kinect.
It is cheaper compared to the above two and non-
intrusive and can measure a wide range of gait pa-
rameters using the sensor and Software Development
Kit (SDK).
However the problem is that the joint points are
approximated by the Kinect and hence are not very
accurate. But, almost all the gait detection systems
first try to locate the joint points and then extract fea-
tures using it so in spite of less accuracy we would
still try to exploit this feature of Kinect in this paper
so as to obtain maximum possible accuracy out of it
as the overhead of joint extraction is removed.
Our objective is to identify an individual on the
basis of her gait with maximum use of joint informa-
tion in extracting various features, use of depth data
information for increasing the accuracy, determining
which of the features are more crucial over other and
looking into different classification algorithms for dif-
ferent types of features.
The paper is organized as follows. Section 2 dis-
cusses the prior work in this area. We define the fea-
342
Mallick, T., Khedia, A., Das, P. and Majumdar, A.
Fast Gait Recognition from Kinect Skeletons.
DOI: 10.5220/0005713903400347
In Proceedings of the 11th Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications (VISIGRAPP 2016) - Volume 3: VISAPP, pages 342-349
ISBN: 978-989-758-175-5
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

tures of gait and their extraction in Section 3. Section
4 discusses the classifiers. Experiments and Results
are explained in Section 5. Finally, we conclude in
Section 6.
2 RELATED WORK
In vision research, there has been a lot of experiments
to recognize people from gait. The gait detection
problem also gives information about the well-being
of an individual as well as can be used for recogni-
tion. Different works propose different approaches to
the problem of gait detection. The gait recognition ap-
proach can broadly be of two types – Marker-based or
Marker-less. Marker-based approaches make use of
wearable sensors for gait detection and the marker-
less approaches consist of using video cameras or
Kinect for gait detection (Stone and Skubic, 2011),
(Gabel et al., 2012), (Preis et al., 2012), (Sinha et al.,
2013), (Wang et al., 2003), (Isa et al., 2005), (Ball
et al., 2012).
2.1 Marker-based Approach
The marker-based approaches use of some sensors
placed on the subject. Moving Light Display (MLD)
is a light pattern corresponding to the moving sub-
jects. Johansson (Johansson, 1973), (Johansson,
1975) showed that humans can quickly identify a
moving light display (MLD), corresponds to a walk-
ing human but when presented with a static image
from the MLD, humans are unable to recognize any
structure. This was the basis of the marker-based sys-
tems for gait recognition. Tanawongsuwan & Bo-
bick (Tanawongsuwan and Bobick, 2001) use joint-
angle trajectories measured using a magnetic-marker
motion-capture system. There is also relevant work in
the computer animation field, including that of recov-
ering underlying human skeletons from motion cap-
ture data (O’Brien et al., 2000),(Silaghi et al., 1998)
and analysing and adjusting characteristics of joint-
angle signals (Sudarsky and House, 2000), (Bruder-
lin et al., 1996), (Bruderlin and Williams, 1995) and
(Brand and Hertzmann, 2000).
2.2 Marker-less Approach
This approach uses RGB video cameras or Kinect for
data acquisition, extracts each frame from the video
and then performs image processing to extract the rel-
evant features for recognition. They can be broadly
divided into two categories – RGB and RGB-D
2
.
2
RGB images with depth information.
RGB
The spatial and temporal features are mainly extracted
from the RGB frames in various ways. Ran et.
al. (Ran et al., 2007) use Hough Transform to extract
the main leg angle and use Bayesian Classifier for gait
detection. Jean et. al. (Jean et al., 2009) proposed the
use of trajectories of significant body points like the
head and feet for gait detection.
Model-free Human body silhouette is the most
frequently used initial feature, which can be easily
obtained from background subtraction. Boulgouris &
Chi (Boulgouris and Chi, 2007) use Radon transform
on silhouette to extract the feature of each frame, and
employ Linear Discriminant Analysis (LDA) for di-
mensionality reduction. A similar method has been
used in (Wang et al., 2003) where Wang et. al. detect
gait patterns in a video sequence and develop an eigen
gait or gait signature for the particular video.
Ben-Abdelkader et. al. (BenAbdelkader et al.,
2001) exploit the self similarity to create a represen-
tation of gait sequences that is useful for gait recog-
nition. Quasi gait methods rely on various static fea-
tures like build of the body. One advantage to quasi
gait approaches is that they may be less sensitive to
variation in a gait. For example, the gait of a person
may vary for various reasons, but their skeletal dimen-
sions will remain constant. Bobick & Johnson (Bo-
bick and Johnson, 2001) measured a set of four pa-
rameters that describe a static pose extracted from a
gait sequence.
Kellokumpu et. al. (Kellokumpu et al., 2009) as-
sume time as the third dimension other than XY axes
in the image plane, so that consider the accumulation
of gait sequence as XY T three-dimensional space.
Davis & Bobick (Davis and Bobick, 1997) describe
a Motion Energy Image (MEI) and a Motion History
Image (MHI), both derived from temporal image se-
quences.
RGB-D
With the development of depth imaging, researchers
has also tried using them for Gait analysis. The depth
information can be obtained by using multiple cam-
eras, stereo cameras or Kinect.
Non-Kinect
There have been several research in this field using
non-Kinect based techniques. Igual et. al. (Igual
et al., 2013) presented an approach for gait-based
gender recognition using depth cameras. The main
contribution of this study was a new fast feature ex-
traction strategy that uses the 3D point cloud ob-
Fast Gait Recognition from Kinect Skeletons
343

tained from the frames in a gait-cycle. Ioanaddis et.
al. (Ioannidis et al., 2007) proposed the use of inno-
vative gait identification and authentication method
based on 2-D and 3-D features. The data was captured
using stereo camera which can be used to extract the
depth information.
Kinect
Stone et. al. (Stone and Skubic, 2011) has tried to
find any anomality of the subject on the basis of the
walking speed and stride length using depth informa-
tion returned by Kinect. Preis et. al. (Preis et al.,
2012) proposed to directly calculate the static fea-
tures(length of the bones) from the actual 3-D coor-
dinates of the joints returned by the Kinect and pre-
sented some results using different classification al-
gorithms and compared the performance of different
algorithms. Sinha et. al. (Sinha et al., 2013) has pre-
sented the use of static, distance and area features
with Neural Network learning for gait recognition us-
ing Kinect. Ball et. al. (Ball et al., 2012) has used
Kinect for gait recognition. It has taken a very small
dataset of 4 subjects and tried to do unsupervised clus-
tering using angular features and K-means clustering
algorithm. Some works has basically tried to calcu-
late some gait features like stride length, speed us-
ing the marker based techniques and the Kinect based
techniques and tried to find the accuracy of the Kinect
based systems considering the other one as the stan-
dard (Gabel et al., 2012), (Stone and Skubic, 2011).
Chattopadhyay et. al. (Chattopadhyay et al., 2014)
explored the applicability of Kinect RGB-D streams
in recognizing gait patterns of individuals. Gait En-
ergy Volume (GEV) is a feature that performs gait
recognition in frontal view using only depth image
frames from Kinect.
In this work we judiciously select and combine the
features, through a set of detailed experiments, to get
maximum skeleton based recognition in optimal time.
3 FEATURE EXTRACTION
Gait is a continuous yet periodic process. Hence it
is usually studied and analysed in terms of the half-
gait-cycle. We define various features (usually over
a half-gait-cycle) and discuss how they are extracted
and what their characteristics are. The half-gait-cycle
and the features are defined in terms of the 3D joint-
points of the 20-joints’ skeletal model (Figure 1) re-
turned by Kinect in every frame. The skeleton stream
is first cleaned up using the moving-average filter (of
window size 8) to reduce noise due to sudden spikes.
Figure 1: 20-joints’ skeletal model tracked by Kinect. We
refer to RIGHT as ’R’, LEFT as ’L’, and ’CENTER’ as ’C’.
Figure 2: An example of half-gait-cycle extraction.
3.1 Half-Gait-Cycle Detection
Consider the plot (Figure 2) of the absolute differ-
ence of X-coordinates D
k
between left and right an-
kle joint-points over consecutive frames. Formally,
D
k
= |ANKLE L(k).x − ANKLE R(k).x| for 1 ≤ k ≤
N, where N = total number of frames for an individ-
ual side-walk (N > 1). The plot is first cleaned up
using the moving-average filter (of window size 3) to
reduce noise. The half-gait-cycle is then defined as
the frames between two consecutive local minima in
this plot.
We use six types of features, namely, Static, Area,
Distance, Dynamic, Angular, and Contour-based fea-
tures here. The first 5 features are extracted from the
skeleton stream while the contour-based features are
extracted from the depth stream as detailed in the next
few sections.
3.2 Static Features (10-tuple)
The static features estimate the physique of the user.
They are invariant over movements. We define 10
static features (Table 1) in terms of the Euclidean dis-
tance, d(.,.) between the adjacent joint-points. To es-
timate these features we consider the median of these
values over the entire video to annul the effects of in-
termittent spikes.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
344
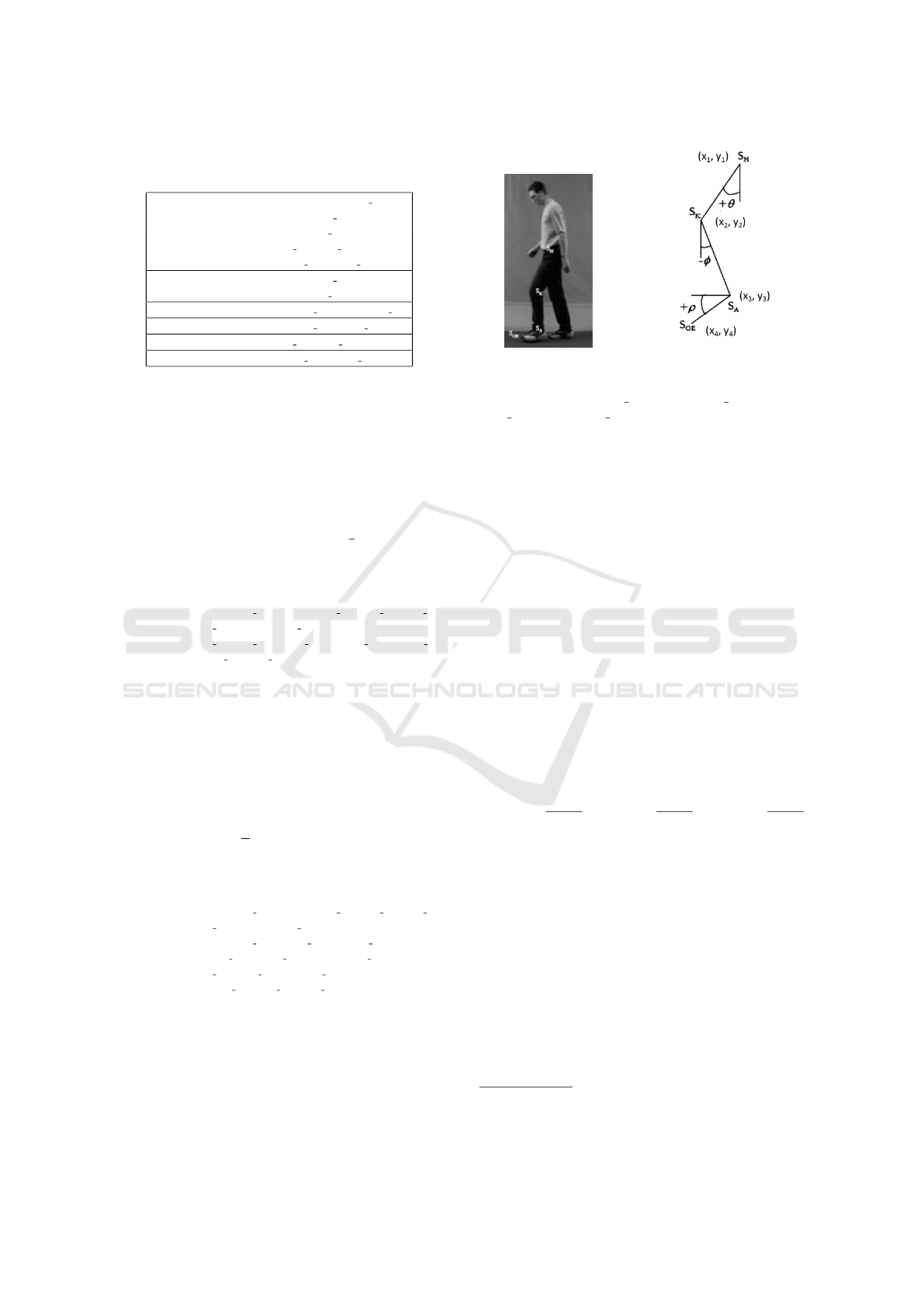
Table 1: Static features in terms of joint-points. The last 4
features are both for right and left limbs (X = R or L).
Height = d(HEAD, SHOULDER C) +
d(SHOULDER C, SPINE) +
d(SPINE, HIP C) +
d(HIP L, KNEE L) +
d(KNEE L, ANKLE L)
Torso = d(SHOULDER C, SPINE) +
d(SPINE, HIP C)
Upper Arm (X) = d(ELBOW X, SHOULDER X)
Forearm (X) = d(ELBOW X, WRIST X)
Thigh (X) = d(HIP X, KNEE X)
Lower Leg (X) = d(KNEE X, ANKLE X)
3.3 Area Features (2-tuple)
During side-walk the upper (lower) part of the body
sweeps a certain area by the swing and spread of the
hands (legs). Each such area, usually, is a distinguish-
ing factor for an individual. It is defined as the area
of the XY -projection of a closed polygon of N joint-
points ~p
i
= (x
i
,y
i
,z
i
),0 ≤ i ≤ N,3 ≤ N ≤ 20, selected
for the side-walk. It is given by A =
1
2
∑
N
i=0
(x
i
∗ y
j
−
y
i
∗ x
j
); j = (i + 1) mod N.
We consider two discriminating areas defined as:
Upper Body SHOULDER C, SHOULDER R, HIP R, HIP C,
HIP L, & SHOULDER L
Lower Body HIP C, HIP R, KNEE R, ANKLE R, ANKLE L,
KNEE L, & HIP L
The area feature vector is computed as the mean
of these numbers over a half-gait-cycle.
3.4 Distance Features (4-tuple)
The Euclidean distance between the centroid of a
body part and the centroid of the upper body is usually
unique for an individual. The body part is contained
by a closed polygon of N vertices and the centroid
is computed as ~c =
1
N
∑
N
i=0
~p
i
. We consider four dis-
tances – to the centroids of both hands and legs. The
corresponding polygons are defined as:
Upper Body SHOULDER C, SHOULDER R, HIP R, HIP C,
HIP L, & SHOULDER L
Right Hand SHOULDER R, ELBOW R, & WRIST R
Left Hand WRIST L, ELBOW L, & SHOULDER L
Right Leg HIP R, KNEE R, & ANKLE R
Left Leg ANKLE L, KNEE L, & HIP L
The distance feature vector is computed as the
mean of these numbers over a half-gait-cycle.
3.5 Dynamic Features (2-tuple)
The Stride Length and Speed of the subject form the
dynamic features. Consider the plot (Figure 2) of the
(a) (b)
Figure 3: Angular Features θ, φ, and ρ from (Isa et al.,
2005), where S
H
≡ HIP X, S
K
≡ KNEE X, S
A
≡ AN-
KLE X, S
OE
≡ FOOT X, and X = RIGHT or LEFT.
absolute difference of X-coordinates between left and
right ankle joint-points over consecutive frames. The
gap (in X-coordinate) between the alternate maxima’s
(or minima’s) in this plot gives the step lengths. We
take the median of step lengths as the stride length.
We compute the number of frames in a stride and
using the Kinect’s frame rate as 30 fps, we com-
pute the speed of the subject as stride length/stride
time. These dynamic features are situation dependent
and can vary abruptly. Yet they often contain some
individual-specific information that can improve the
overall accuracy.
3.6 Angular Features (6-tuple)
While walking different parts of the leg (side-view)
make distinctive angles θ, φ, and ρ with the vertical
and the horizontal lines. These are depicted in Fig-
ure 3. Using the XY -projection of the coordinates
of the joint-points these angles can be computed as:
θ = tan
−1
|x
2
−x
1
|
|y
2
−y
1
|
,φ = tan
−1
|x
3
−x
2
|
|y
3
−y
2
|
,ρ = tan
−1
|y
4
−y
3
|
|x
4
−x
3
|
.
These angles are considered for the half-gait-cycle.
3.7 Contour-based Features
So far we considered features extracted from the
skeleton stream. The contour-based feature, in con-
trast, is extracted from the depth stream. Recogniz-
ing people through gait depends on how the silhou-
ette shape of an individual changes over time. Pro-
crustes Shape Analysis
3
is used to obtain the Gait Sig-
nature (Wang et al., 2003) of the video as follows:
1. The first frame is taken as the static background
and is subtracted from all frames to leave only the
moving subject in them.
3
Procrustes analysis is a form of statistical shape analy-
sis used to analyze the distribution of a set of shapes.
Fast Gait Recognition from Kinect Skeletons
345

2. Each frame is binarized using a threshold. Filter
out the largest connected component. This is the
shape or silhouette of the subject.
3. Compute the centroid of the silhouette from the
points on the contour. Traverse the contour anti-
clockwise to transform the points along outer con-
tour in the coordinate system with the centroid
z
c
= (x
c
,y
c
) as the origin. Represented each point
as a complex number z
i
.
4. The shape is represented as the Z =
[z
1
,z
2
,· ·· ,z
N
b
] where N
b
is the number of
points on the outer contour. Two representations
represent same shape if one can be obtained from
the other using a combination of translation,
rotation, and scaling. Normalized representations
for different frames of a video by interpolation
such that they contain the same number of points.
5. Compute the principal eigen vector of the matrix
S =
∑
(u
i
u
∗
i
)/(u
∗
i
u
i
) where u
i
represents the con-
figuration of a frame of the video and ∗ opera-
tion means the complex conjugate transpose of a
matrix. The Principal Eigen Vector serves as gait
signature for the video.
We use different classifiers for different features.
4 CLASSIFICATION
We use three different classifiers or matching algo-
rithms - Na
¨
ıve Bayes Classifier for static, area, dis-
tance and dynamic features, Dynamic Time Warping
for angular features, and Procrustes Distance for con-
tour features.
4.1 Na
¨
ıve Bayes Classifier
The static, area, distance and dynamic features are
mutually independent. Hence they are composed in
a 18-dimensional feature vector (10 static, 2 area, 4
distance, and 2 dynamic). Na
¨
ıve Bayes classifier is
used with this feature vector to assign scores to each
video in the training set with respect to its similarity
to a test video. These scores are stored for later use.
The higher the scores, more similar are the gaits.
4.2 Dynamic Time Warping
Angular features are considered as a sequence over a
half-gait-cycle. To match such a sequence of a train-
ing video with that of a test video, we use Dynamic
Time Warping (M
¨
uller, 2007). DTW works well
for non-linear time alignment where one sequence is
shifted, stretched, or shrunk in time with respect to
the other. Time is normalized over a half-gait-cycle
to adjust the sequences to the same length. Also, we
perform variance normalisation of these sequences to
reduce noise. A test video is matched against each of
these sequences in the training set and the resulting
DTW scores are stored in the database for later use.
4.3 Procrustes Distance
The contour-based feature is obtained as the eigen
gait signature for a video s described in Section 3.7.
The Procrustes distance between two gait signatures
between a test and a training video is given by
d(u
1
,u
2
) = 1 − |u
∗
1
u
2
|
2
/(|u
1
|
2
|u
2
|
2
), where u
1
,u
2
are
gait signatures and the ∗ operation represents the
complex conjugate transpose of a vector. The smaller
the distance, more similar are the gaits. The corre-
sponding scores are stored in the database.
4.4 Composite Score
The differences in DTW and Procrustes distances are
small compared to the Bayesian scores. Hence these
differences are amplified by exponentiation and then
the 3 scores are multiplied to obtain the composite
score. Finally Nearest-Neighbour classifier is used
on this composite score to classify a test video to the
class of the training video where the score maximizes.
5 EXPERIMENTS AND RESULTS
The system has been implemented using several li-
braries. The videos are captured in C++ using Kinect
Windows SDK
4
v1.8, the features are extracted using
MATLAB 2012b, DTW & Procrustes distances also
are computed using MATLAB, and a open-source
code
5
for Na
¨
ıve Bayes Classifier in C#.Net is used.
We have carried out several experiment to validate our
system as described below.
5.1 Data Sets and Processing
No benchmark gait dataset for skeleton and depth data
from Kinect 1.0 is available. Hence we have created
a dataset of 29 subjects (20 male and 9 female) for
training as well as testing. For this 5 composite Kinect
videos (comprising RGB, depth and skeleton streams)
4
http://www.microsoft.com/en-in/download/
details.aspx?id=40278
5
http://www.codeproject.com/Articles/318126/
Naive-Bayes-Classifier
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
346
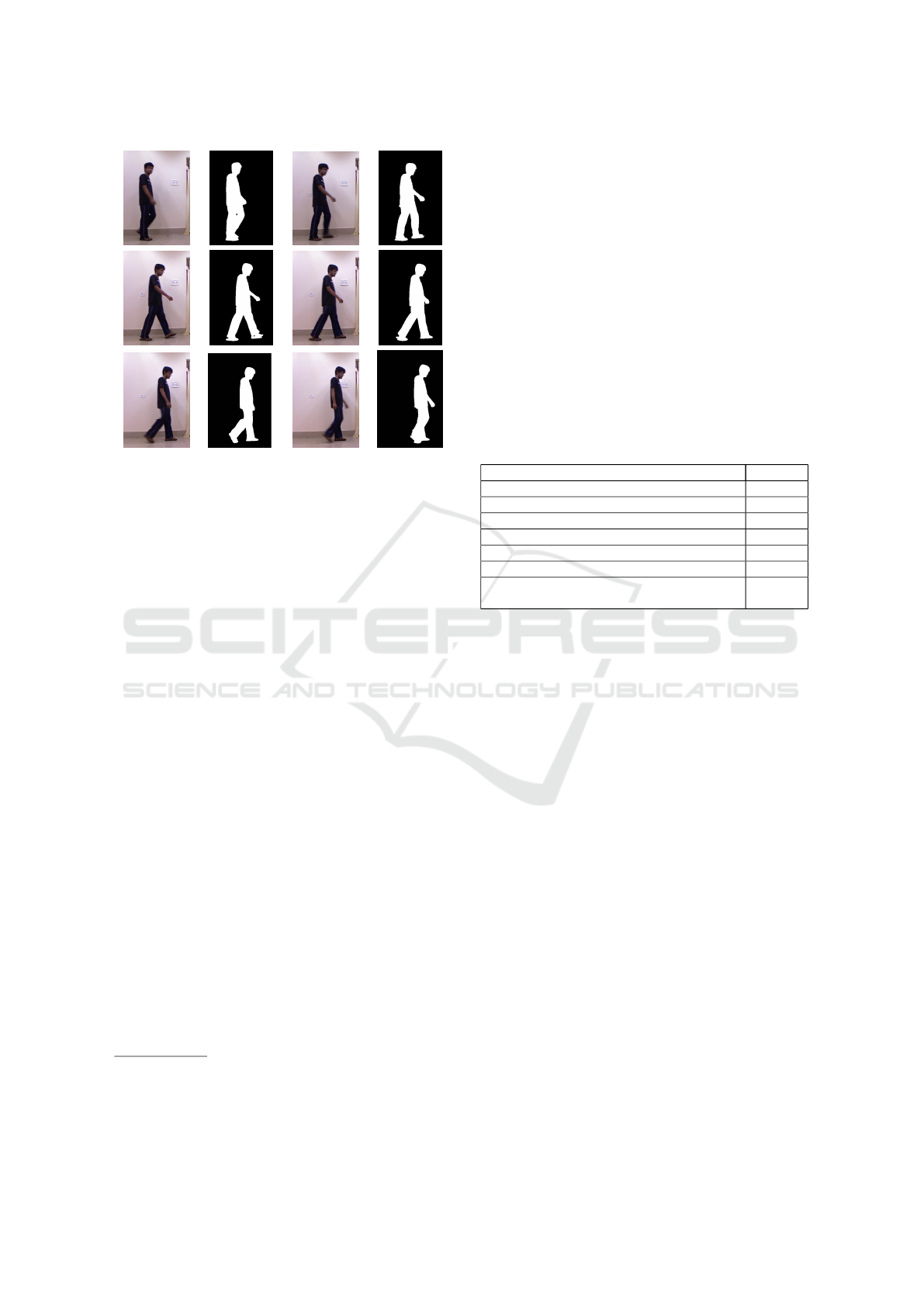
Figure 4: 6 Frames depicting the half-gait-cycle of the sub-
ject alternating with the silhouettes from respective frames.
of the side-walk of each subject was recorded using
the Kinect 1.0. In every video the subject moves in
a straight-line without occlusion against a fixed back-
ground that is separately recorded (For sample RGB
frames of a video see Figure 4). From the composite
video we extract the individual streams
6
.
The skeleton stream is first filtered using a mov-
ing average filter (of size 8) to reduce jitter. The joint-
points are then used to extract the half-gait-cycle (Fig-
ure 4) and the static, area, distance, dynamic, and an-
gular features as discussed in Section 3.
Frames from the depth stream are binarised af-
ter background subtraction. For the largest connected
component in every binary frame (silhouette of the
human – Figure 4) the contour is calculated. The con-
tours are used to compute the gait signature of the
depth video.
The same processing is done for the training as
well as test videos to extract the features. For a test
video, however, we need to compute the classification
scores and the composite score against every training
video (Section 4). These are fed to the Nearest Neigh-
bour classifier for final recognition.
5.2 Results
We use 5 videos each for 29 subjects (20 male and 9
female). The system is trained with 4 of these videos
for every subject and the 5th video is used for testing.
The performance of the system is measured by the
6
While the skeleton stream is used for most features, the
depth stream is used only for contours, and the RGB stream
is used just for visualization. It has no contribution to the
recognition tasks.
accuracy – the ratio of the number of videos correctly
labeled to the total number of test videos (29 here).
To understand the effectiveness and discriminat-
ing power of various features, we have performed the
recognition using various sets of features (and cor-
responding classifiers). The results are given in Ta-
ble 2. The results show that the static and angular fea-
tures are the most dominating. The dynamic features
(speed and stride length), though situation dependent,
help to increase the accuracy while area and distance
have hardly any impact. The increase in accuracy af-
ter incorporating contour based features is marginal
because the contour based features are already been
taken care of by other features like the distance and
area features.
Table 2: Accuracy with different feature sets.
Features used Accuracy
Static features 48.25%
Distance features 34.48%
Angular features 37.93%
Static, distance features 44.82%
Static, distance, area & dynamic features 55.17%
Static, distance, area & dynamic & angular features 65.57%
Static, distance, area & dynamic, angular & contour
based features
68.96%
Using the features extracted from the skeleton
stream, we get accuracy of around 65%. The lack of
accuracy is due to the inaccuracy of the coordinates
of the joint-points. The skeletons often are erroneous
and any error in this leads to significant loss of feature
information.
In Table 3, we compare our results with a num-
ber of previous papers using the accuracy data as re-
ported in each. We find that methods working on
RGB have better accuracy at the cost of efficiency.
Only one Kinect skeleton-based approach (Preis et al.,
2012) achieved accuracy comparable to RGB meth-
ods. However, its results are reported on a small data
set. Otherwise, our method achieves a better accuracy
compared to other skeleton-data methods.
For an apple-to-apple comparison we have im-
plemented an RGB-based method by mixing the ap-
proaches from (Roy et al., 2012) and (Wang et al.,
2003). We test this method with the same data set as
our system (only RGB frames are used) and the re-
sults are given in Table 4. We find that this achieves
a much better accuracy of 83% (in comparison to our
65%) albeit at the cost of efficiency.
Fast Gait Recognition from Kinect Skeletons
347

Table 3: Comparison with reported results from prior work.
Description Remarks
16 Wearable Sensor, Angular features,
2 data sets: 73%: 1st. 42%: 2nd
(Tanawongsuwan and Bobick, 2001)
Good accuracy but intrusive
and costly
RGB sensor, Contour based features,
71% (Wang et al., 2003)
High processing time for
each RGB frame
RGB Sensor, Pose Kinematics & Pose
energy images, 83% (Roy et al., 2012)
Good accuracy on large
dataset. Heavy computation
Kinect, Skeleton, Static features, 85%
(Preis et al., 2012)
High accuracy; Small
dataset (9 subjects); Frontal
view (stationary subjects)
Kinect, Skeleton, Angular features,
Avg.: 44% sub1: 35%, sub2: 74%,
sub3: 39%, sub4: 33% (Ball et al.,
2012)
Accuracy low for even small
dataset
Kinect, Skeleton, Static, distance &
area features, 25% (Sinha et al., 2013)
Very low accuracy as angu-
lar features not considered
Table 4: Comparison on same data set (RGB only).
Description Remarks
RGB Sensor, Shape feature, 83% (Wang
et al., 2003)
Good accuracy on large
dataset.
RGB Sensor, Key Poses (Roy et al., 2012) Heavy computation.
We extract the shape based feature (Wang et al., 2003) from RGB data
then estimate the key poses (Roy et al., 2012) to recognize gait from
Kinect RGB data of our gait data set.
6 CONCLUSION
There have been several attempts to recognize gait
from RGB video. Many of these offer about 85% ac-
curacy (Tables 3 and 4). Handling RGB data is ex-
pensive in terms of processing speed and hence most
of these methods cannot work in real-time. In con-
trast, the present system works mainly with skeleton
stream to recognize gait. Skeleton data is less in vol-
ume (only 60 floating point numbers per frame cor-
responding to the 3D coordinates of 20-joints) com-
pared to RGB or depth data (typically 640 X 480 ≈
0.3 million integers). Therefore skeleton-based tech-
niques are more amenable to real-time processing.
The system takes about 1.5 secs (for a test video)
to recognize the gait if only static, area, distance &
dynamic features are used. This gives over 55% ac-
curacy (Table 2) which is better than similar skeleton-
based methods reported earlier (Table 3). Recognition
from RGB (Roy et al., 2012), (Wang et al., 2003) on
the same data set takes about 12 secs each video while
the accuracy improves to 83% (Table 4).
If angular features are added to the set, the execu-
tion time of our system increases to about 29 secs /
video while the accuracy goes to over 65% (Table 2).
This nearly 20-fold increase in time is due to the use
of DTW in matching because we use a na
¨
ıve MAT-
LAB implementation that is quadratic in complexity.
Using a linear implementation can drastically reduce
this time. Also, reduction of the dimensionality of the
angular feature set can substantially improve time.
Adding contour-based features to our set improves
the accuracy to 69% (Table 2) while the time shoots
to 127 secs. This is due to use of depth data that is
inherently heavy. Hence we recommend not to use
depth data and contour-based features.
We are, therefore, working further on smarter im-
plementations for skeleton-based features for meeting
real-time constraints and at the same time experiment-
ing with better classifiers including HMM and SVM.
ACKNOWLEDGEMENT
We acknowledge TCS Research Scholar Program.
REFERENCES
Ball, A., Rye, D., Ramos, F., and Velonaki, M. (2012).
Unsupervised clustering of people from skeleton data.
In Human-Robot Interaction, Proc. of Seventh Annual
ACM/IEEE International Conference on, pages 225–
226.
BenAbdelkader, C., Cutler, R., Nanda, H., and Davis,
L. (2001). Eigengait: motion-based recognition
of people using image self-similarity. In Audio-
and Video-Based Biometric Person Authentication
(AVBPA 2001). Lecture Notes in Computer Science.
Proc. of 3rd International Conference on, volume
2091, pages 284–294.
Bobick, A. F. and Johnson, A. Y. (2001). Gait recognition
using static activity-specific parameters. In Computer
Vision and Pattern Recognition (CVPR 2001). Proc.
of 2001 IEEE Computer Society Conference on, vol-
ume 1, pages 423–430.
Boulgouris, N. V. and Chi, Z. X. (2007). Gait recognition
using radon transform and linear discriminant analy-
sis. Image Processing, IEEE Transactions on, 16:731–
740.
Brand, M. and Hertzmann, A. (2000). Style machines. In
Computer Graphics and Interactive Techniques (SIG-
GRAPH ’00). Proc. of 27th Annual Conference on,
pages 183–192.
Bruderlin, A., Amaya, K., and Calvert, T. (1996). Emotion
from motion. In Graphics Interface (GI ’96). Proc. of
Conference on, pages 222–229.
Bruderlin, A. and Williams, L. (1995). Motion signal pro-
cessing. In Computer Graphics and Interactive Tech-
niques (SIGGRAPH ’95). Proc. of 22nd Annual Con-
ference on, pages 97–104.
Chattopadhyay, P., Roy, A., Sural, S., and Mukhopadhyay,
J. (2014). Pose depth volume extraction from rgb-d
streams for frontal gait recognition. Journal of Visual
Communication and Image Representation, 25:53–63.
VISAPP 2016 - International Conference on Computer Vision Theory and Applications
348

Davis, J. W. and Bobick, A. F. (1997). The representation
and recognition of human movement using temporal
templates. In Computer Vision and Pattern Recogni-
tion. Proc. of IEEE Computer Society Conference on,
pages 928–934.
Gabel, M., Gilad-Bachrach, R., Renshaw, E., and Schuster,
A. (2012). Full body gait analysis with Kinect. In En-
gineering in Medicine and Biology Society (EMBC),
Proc. of 2012 Annual International Conference of the
IEEE, pages 349–361.
Igual, L., Lapedriza, A., and Borras, R. (2013). Robust
Gait-Based Gender Classification using Depth Cam-
eras. Eurasip Journal On Image And Video Process-
ing.
Ioannidis, D., Tzovaras, D., Damousis, I. G., Argyropoulos,
S., and Moustakas, K. (2007). Gait recognition using
compact feature extraction transforms and depth in-
formation. Information Forensics and Security, IEEE
Transactions on, 2:623–630.
Isa, W. N. M., Sudirman, R., and Sh-Salleh, S. H. (2005).
Angular features analysis for gait recognition. In
Computers, Communications, & Signal Processing
with Special Track on Biomedical Engineering (CCSP
2005). Proc. 1st International Conference on, pages
236–238.
Jean, F., Albu, A. B., and Bergevin, R. (2009). To-
wards view-invariant gait modeling: Computing view-
normalized body part trajectories. Pattern Recogni-
tion, 42:2936–2949.
Johansson, G. (1973). Visual perception of biological mo-
tion and a model for its analysis. Perception and Psy-
chophysics, 14:201–211.
Johansson, G. (1975). Visual motion perception. Scientific
American, 232:76–88.
Kellokumpu, V., Zhao, G., Li, S. Z., and Pietikinen, M.
(2009). Dynamic texture based gait recognition. In
Advances in Biometrics (ICB 2009). Lecture Notes in
Computer Science. Proc. of 3rd International Confer-
ence on, volume 5558, pages 1000–1009.
M
¨
uller, M. (2007). Dynamic Time Warping.
O’Brien, J. F., Jr., R. E. B., Brostow., G. J., and Hodgins,
J. K. (2000). Automatic joint parameter estimation
from magnetic motion capture data. Graphics Inter-
face. Proc. of Conference on, pages 53–60.
Preis, J., Kessel, M., Werner, M., and Linnhoff-Popien, C.
(2012). Gait recognition with kinect. In Kinect in
Pervasive Computing, Proc. of the First Workshop on.
Ran, Y., Weiss, I., Zheng, Q., and Davis, L. S. (2007).
Pedestrian detection via periodic motion analysis. In-
ternational Journal of Computer Vision, 71:143–160.
Roy, A., Sural, S., and Mukhopadhyay, J. (2012). Gait
recognition using pose kinematics and pose energy
image. Signal Processing, 92:780–792.
Silaghi, M.-C., Pl
¨
ankers, R., Boulic, R., Fua, P., and Thal-
mann, D. (1998). Local and global skeleton fitting
techniques for optical motion capture. In Modelling
and Motion Capture Techniques for Virtual Environ-
ments (CAPTECH ’98). Proc. of International Work-
shop on, pages 26–40.
Sinha, A., Chakravarty, K., and Bhowmick, B. (2013).
Person identification using skeleton information from
kinect. In Advances in Computer-Human Interaction
(ACHI 2013), Proc. 6th International Conference on,
pages 101–108.
Stone, E. and Skubic, M. (2011). Evaluation of an inexpen-
sive depth camera for in-home gait assessment. Jour-
nal of Ambient Intelligence and Smart Environments,
3:349–361.
Sudarsky, S. and House, D. (2000). An Integrated Approach
towards the Representation, Manipulation and Reuse
of Pre-recorded Motion. In Computer Animation (CA
’00). Proc. of Conference, pages 56–61.
Tanawongsuwan, R. and Bobick, A. (2001). Gait Recog-
nition from Time-normalized Joint-angle Trajectories
in the Walking Plane. In Computer Vision and Pat-
tern Recognition (CVPR 2001), Proc. of 2001 IEEE
Computer Society Conference on, pages 726–731.
Wang, L., Tan, T., Hu, W., and Ning, H. (2003). Automatic
gait recognition based on statistical shape analysis.
Image Processing, IEEE Transactions on, 12:1120–
1131.
Fast Gait Recognition from Kinect Skeletons
349
