
Information Efficient Automatic Object Detection and Segmentation
using Cosegmentation, Similarity based Clustering, and Graph Label
Transfer
Johannes Steffen, Marko Rak, Tim K
¨
onig and Klaus-Dietz T
¨
onnies
Otto von Guericke University Magdeburg, Institute of Simulation and Graphics, Magdeburg, Germany
Keywords:
Object Detection, Object Segmentation, Cosegmentation.
Abstract:
We tackle the problem of unsupervised object cosegmentation combining automatic image selection, coseg-
mentation, and knowledge transfer to yet unlabelled images. Furthermore, we overcome the limitations often
present in state-of-the-art methods in object cosegmentation, namely, high complexity and poor scalability
w.r.t. image set size. Our proposed approach is robust, reasonably fast, and scales linearly w.r.t. the image set
size. We tested our approach on two commonly used cosegmentation data sets and outperformed some of the
state-of-the-art methods using significantly less information than possible. Additionally, results indicate the
applicability of our approach on larger image sets.
1 INTRODUCTION
One of the most important problems in image analy-
sis is object segmentation or the slightly more restric-
tive figure/ ground separation. The task is to label im-
age pixels according to high-level derived meaningful
contents and partitioning it into two distinct but se-
mantically meaningful parts. However, answering the
question whether or not a region of an image is indeed
semantically meaningful for an observer or any other
receiving entity and, hence, belongs to the object in
question, is often a hard task.
Usually, computational models for object segmen-
tation have to be carefully tuned and optimized for
the objects or the object classes that are relevant for
a certain domain. Therefore, when developing a spe-
cific object segmentation system one tends to consol-
idate object class relevant information and integrate
it, manually or in a supervised learning setting, into a
complex and object class dependent model. Addition-
ally, one can address object segmentation using only
intra image (or single source) information, thus, only
image intrinsic information is used to separate an ob-
ject from the rest of the image (e.g., using edge based
segmentation methods and incorporating spatial co-
herence of an object’s pixels). While this approach
is object class independent as no prior information
about specific objects is used to derive a model for
segmentation, it is prone to errors since a model for
a general object segmentation is created indirectly.
Thus, general information of how we expect objects
to be represented within an image is introduced either
way. While many approaches learn object class spe-
cific segmentation and detection models, e.g., with a
ground truth segmented training set representing the
most prominent object features, an interesting ques-
tion to ask is whether it is possible to segment objects
only by example images without any prior knowledge
about the specific object class.
1.1 Cosegmentation
Given that one does not have any information about
the object in question the idea is to exploit inter im-
age information, thus, aggregating information from
a pair or a set of images, combined with holistic as-
sumptions of how all or at least most of the objects are
represented in images (e.g., spatial coherence, smooth
edges, or shared features of object intrinsic neigh-
bouring regions). Rother et al. (Rother et al., 2006)
were among the first trying to enhance object segmen-
tation quality based on exemplary images containing
a common object. They defined cosegmentation as
the task of “segmenting simultaneously the common
parts of an image pair”. Later on, the rather unre-
stricted definition of the common was refined into the
common object(s) (Vicente et al., 2011).
During the last years, cosegmentation has received
more and more attention in the computer vision and
machine learning community and a vast amount of
different approaches were proposed. Many of the ex-
isting approaches (e.g., (Rother et al., 2006; Vicente
et al., 2010; Mukherjee et al., 2009; Hochbaum and
Singh, 2009)) are based on MRFs (Markov Random
Steffen, J., Rak, M., König, T. and Tönnies, K-D.
Information Efficient Automatic Object Detection and Segmentation using Cosegmentation, Similarity based Clustering, and Graph Label Transfer.
DOI: 10.5220/0005625103970406
In Proceedings of the 5th International Conference on Pattern Recognition Applications and Methods (ICPRAM 2016), pages 397-406
ISBN: 978-989-758-173-1
Copyright
c
2016 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
397

Fields) and do have computationally high complex-
ity. It was soon extended to segmenting commonali-
ties among image sets instead of image pairs. How-
ever, while the first approach of segmenting the com-
mon of an image pair implicitly stresses rather hard
assumptions on the image pair used (i.e., the shared
object on both of the images should be “very simi-
lar” to allow for a good matching) the later extension
to image sets allows a greater variety in an object’s
appearance as long as it represented well enough in
the set. Intuitively, one would expect the cosegmen-
tation segmentation quality to increase the more ex-
emplary images of an object are present in the image
set. However, especially in the MRF based solutions
complexity will grow non-linear w.r.t. image set size.
Moreover, given a large image set sharing a common
object it is likely that some subset of it covers the ob-
ject class’ variability well enough. Therefore, when
performing large-scale cosegmentation it is reason-
able to choose exemplary images from the image set,
namely, a subset that covers the class’ variability, in-
stead of performing cosegmentation on the complete
image set as it is done in literature and the MRF based
approaches.
Throughout this work, we will present an ap-
proach to overcome this limitation while maintaining
state of the art performance.
2 RELATED WORK
Most of the MRF based solutions introduce a spe-
cial constraint for foreground similarity and integrate
it within the MRF’s potentials to obtain a matching
across two images instead of segmenting them sep-
arately. There are two key components that differ
in MRF based cosegmentation approaches: 1) the
method used to integrate foreground/ object similar-
ity across the images, and, 2) the optimization pro-
cedure used to minimize the corresponding MRF’s
energy function. Following the notation of (Vicente
et al., 2010), the MRF’s energy function is denoted as
E(x) =
∑
p
w
p
x
p
| {z }
unary term
+
∑
(p,q)
w
pq
|x
p
− x
q
|
|
{z }
pairwise term
+λE
global
(h
1
,h
2
)
| {z }
similarity term
,
(1)
where x
p
and x
q
denote the pixel labelling x (i.e.,
x ∈ {0,1} for foreground/ background), w
p
the unary
weight, w
pq
the weight for pairwise labelling smooth-
ness, λ the similarity weight, and h
1,2
being his-
tograms containing (arbitrarily chosen) information
about the foreground of the two images. Hereby, ap-
proaches (e.g., (Rother et al., 2006; Mukherjee et al.,
2009; Hochbaum and Singh, 2009)) differ in the way
how the similarity term E
global
is modelled and what
optimization procedure is used.
Solving the cosegmentation problem using MRFs
is a reasonable approach and yields good results w.r.t.
segmentation quality. However, computational costs
can be rather high. Furthermore, the complexity in-
creases non-linearly with increasing image set size,
e.g., when using the Boykov-Jolly model (Boykov
and Jolly, 2001). Adding a new image to the set of
images the complete Expectation-Maximization algo-
rithm needs to be rerun to cope with new background
and foreground information. Either way, the power of
MRF based solutions lies in the modelling of the class
similarity as well as in the pairwise potentials used for
its formulation and, subsequently, impacts the choice
of how to perform energy minimization and, hence,
performance.
2.1 (Approximative) k - Nearest
Neighbour Approaches
Recently, cosegmentation approaches based on dif-
ferent variants of the so called PatchMatch (PM) al-
gorithm (Barnes et al., 2009; Barnes et al., 2010)
have been proposed. The PM algorithm was not ex-
plicitly developed for cosegmentation tasks but is in-
deed of great benefit since it provides approximative
k Nearest Neighbour Fields (akNNF) within reason-
ably short time. The algorithm avoids the high costs
of finding exact NNFs using exhaustive minimiza-
tion but rather exploits the fact that it is possible to
find suitable matches randomly and propagate those
matches around a certain spatial neighbourhood of the
original match. Regarding object cosegmentation, the
idea to propagate good matches to a certain neigh-
bourhood is indeed plausible since (at least in many
natural images) coherence is believed to be a crucial
property.
Zhang et al. (Zhang et al., 2011) were among
the first to propose a labelling approach based on the
PatchMatch algorithm. Therefore, they compute the
dense correspondence field over an image pair and
use the resulting akNNF as grounds for label trans-
fer from an already labelled ground truth image set.
Similarly, the work by (Faktor and Irani, 2012; Fak-
tor and Irani, 2013) exploits the PM algorithm to find
co-occurring regions across images and then performs
label transfer on the basis of previously computed re-
gion hypothesis called “Soup of Segments”.
Moreover, (Gould and Zhang, 2012) proposed a
new method based on the idea of the PM algorithm
to overcome the limitation that the PM algorithm was
only capable of processing image pairs instead of ar-
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
398

bitrarily sized image sets. Furthermore, they perform
matching on over-segmentations of images instead of
using pixels and modified the PM algorithm for a
graph based representation. Formally, they define the
PatchMatchGraph (PMG) over images I as a directed
Graph G(I) = hV,Ei, where nodes u ∈ V represent
patches of image i ∈ I and edges (u,v) ∈ E represent
matches between patches. Using this representation,
they furthermore extended the original idea of pair
correspondence for image sets including more than
two images. Therefore, they exploit the idea that if
image 1 has a good match with 2 and image 2 matches
well with image 3 then it is likely that there is a good
match between images 1 with image 3.
PatchMatch based approaches, in contrast to MRF
based ones, are not image set size sensitive as they
converge reasonably fast and can be extended to cope
with large-scale image sets (Gould and Zhang, 2012;
Gould et al., 2014). However, a drawback of purely
PM based approaches is poor labelling w.r.t. to label
smoothness.
3 METHODS
3.1 Overview
Reviewing related work in the field of object coseg-
mentation it becomes evident that existing approaches
often lack practical applicability. Usually, increased
segmentation quality comes at the cost of high
computational complexity (e.g., dense matching ap-
proaches such as in (Rubinstein et al., 2013) or MRF
based approaches mentioned in Section 2) and the
lack of re-usability of previously computed segmenta-
tions, thus, the need to rerun the whole segmentation
procedure for all images when a new image is added
to the cosegmentation set. To overcome this limi-
tation, our approach divides the image set into rea-
sonable clusters that are believed to represent the ob-
ject’s class variability, thus, we propose an approach
to tackle the difficulty to (reasonably) balance com-
putational effort while trying to maintain state of the
art performance in object cosegmentation.
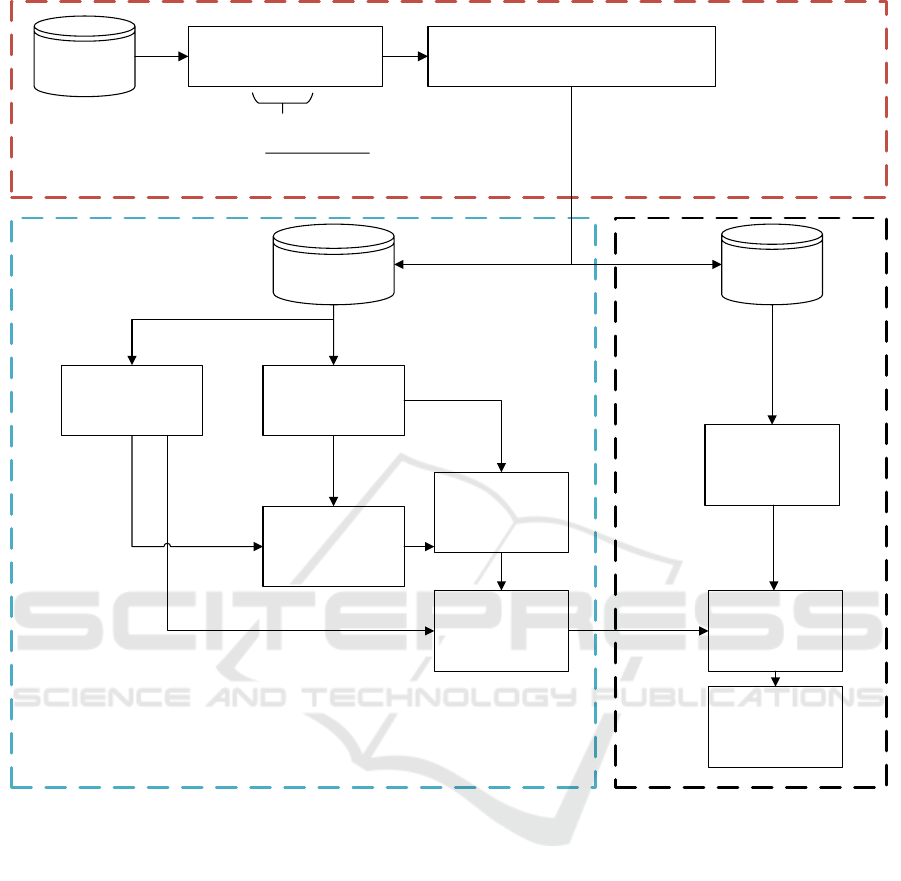
Our approach consists of three subsequent steps:
First, under the assumption that all images in the im-
age set I share a common foreground object, we create
two different sets out of I: 1) a label transferring set
(T ) and 2) a label receiving set (R).
Second, we segment the common foreground ob-
jects in the images of the smaller set T by using inter-
image information and label them as foreground and
the uncommon as background.
Third, we transfer the labels segmented from T to
set R. Figure 1 schematically shows the basic pro-
cessing pipeline including the three steps.
3.2 First Step: Creating the Label
Transferring and the Label
Receiving Set
Given the image set I we cluster all images into k clus-
ters using the k-means algorithm on GIST descriptors
proposed by (Oliva and Torralba, 2001). Since k is
unknown, we repeatedly cluster the images with in-
creasing k (k = 2,3,..., k
max
) 100 times, where k
max
=
b(0.1 · |I|)c. To select an appropriate k several com-
mon internal validity indices can be evaluated. For
the sake of simplicity, we choose the intra-cluster ho-
mogeneity for selecting k. Therefore, the k with the
smallest resulting error sum of squares averaged over
the k clusters is chosen by a majority voting scheme.
For every k cluster centres resulting from the k-
means clustering we now add the corresponding n
nearest neighbours including the centre to the label
transferring set T . The number of nearest images n is
chosen such that n = max(b(0.3 · |I|)/kc, 5). Finally,
the label receiving set R is generated to contain all
remaining elements of I that are not in the label trans-
ferring set T , i.e., R = I \ T.
Parameter Assumptions. The clustering helps to
ensure that the set from which the labels will later
be transferred covers more object variability than we
might have when T is chosen randomly. Furthermore,
setting n to at least 5 ensures that there are enough
similar images per cluster in T to successfully ap-
ply the common foreground segmentation in the next
step.
3.3 Second Step: Common Foreground
Segmentation
Given the images in T that share a common fore-
ground, we now extract the region-based contrast
(RC) (Cheng et al., 2011) providing a saliency image
quantized into 256 values. We now binarize the image
setting all salient values to 1 and the rest to 0. As a re-
sult we obtain a binarized saliency mask that is used to
regularize the region in this image in which an akNNF
is created using the PatchMatch based method (please
see (Gould and Zhang, 2012; Gould et al., 2014) for
more details) to avoid regions that contain most likely
background information.
Information Efficient Automatic Object Detection and Segmentation using Cosegmentation, Similarity based Clustering, and Graph Label
Transfer
399
= max(
0.3 #
, 5)
Image Set
(I)
Estimate #Clusters k (extract
n cluster members per k)
RC Saliency Map
Extraction
Create Label Transferring Set T and Label
Receiving Set R out of I (see text)
Transferring Set
(T)
Receiving Set
(R)
Generate Over-
Segmentations
(Regions)
akNNF Generation
on Biggest RC
Mask
Generate Over-
Segmentations
(Regions)
GrabCut
PostPocessing
akNN Graph
Generation for
Label Transfer
Graph Based Label
Transfer
GrabCut Post-
Pocessing
Figure 1: Schematical processing pipeline consisting of the three stages: First Step (red), Second Step (blue), and Third Step
(black).
3.3.1 Over-segmentation
In contrast to (Gould et al., 2014) we decided to use
Ultrametric Contour Maps (UCM) (Arbelaez, 2006)
instead of multi-level superpixel segmentations such
as SLIC (Achanta et al., 2012) to reduce the amount
of regions that need to be processed later on. Hereby,
segments are hierarchically merged following an ul-
trametric inequality equation and, in contrast to SLIC,
purely data-driven merged without any compactness
prior (see Figure 2 for an example).
3.3.2 Region Descriptor
For each region extracted from the UCMs, the same
(and commonly used) features as in (Gould et al.,
2014) were chosen to describe a region’s appearance:
A modified HOG descriptor by (Felzenszwalb et al.,
2010) with reduced dimensionality (13 dimensions),
concatenated Shannon entropy from the RGB colour
histograms (256 bins each) (3 dimensions), and Lo-
cal Binary Patterns (Ojala et al., 1996; Ojala et al.,
2002) (4 dimensions). We furthermore add the Lo-
cal Self Similarity descriptor proposed by (Shecht-
man and Irani, 2007). Therefore, for each pixel p ∈ I
of the image I a small patch around p is extracted and
compared to the adjacent region within radius r. This
comparison then yields the correlation surface and its
values are transferred into (log)-polar bins. The num-
ber of bins for each histogram is the fourth parame-
ter (the other three being the original patch size, the
size of the neighbouring regions, and the angles con-
trolling the number of circular sectors) to be chosen
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
400

Figure 2: Example visualization of an UCM segmentation: Selected image hierarchy of regions from fine (left) to coarse
(right).
and, because we are binning in log-polar coordinates,
it represents the number of evenly spaced radii in log-
polar domain. To form the descriptor, the highest cor-
relation in each of the obtained histograms is chosen.
Here, we use the standard parameters using 4 bins, 4
circular sectors, and patch size of 5x5 yielding a 16-
dimensional vector.
As in (Gould et al., 2014), after concatenating the
feature vectors, the region descriptor is enriched with
the location (x and y) of the region’s centroid as well
as its respective area. Moreover, to account for spa-
tial neighbours of the region, the mean and standard
deviation of the features of the four neighbouring re-
gions are appended. Finally, averaging the features
across and taking the standard deviation over all pix-
els within the region, yields the overall descriptor (see
(Gould et al., 2014) for further details).
3.3.3 Creating the Label Transfer Graph
Creating the label transfer graph closely follows the
work of (Gould et al., 2014) to whom we refer for a
detailed description and a very good implementation
(Gould, 2012) of the PatchMatch based Graph Label
Transfer. Nonetheless, we will briefly explain the key
concept for the sake of clarity:
Each image in T is now regularized by its corre-
sponding RC saliency map and a hierarchical over-
segmentation using UCMs is extracted. Furthermore,
for each resulting region in each UCM layer, a region
descriptor is computed as described above. Follow-
ing the notation of (Gould et al., 2014), the images
in T are now represented as a graph G(V,E), where
the nodes u ∈ V represent UCM regions, the edges
(u,v) ∈ E represent a connection/ match between two
regions, and x
u
the feature vector associated with re-
gion u.
The goal is to find similarities, thus, to find the k
nearest neighbours for each region. I.e., the following
minimization problem has to be solved (Gould et al.,
2014)
minimize
∑
(u,v)∈E
d(u,v) (2)
subject to ∀u ∈ V : deg(u) = k
∀(u,v) ∈ E : image(u) 6= image(v)
∀(u,v),(u,w) ∈ E : image(v) 6= image(w),
where d(u,v) denotes the distance between two
regions described by their corresponding feature vec-
tors.
The first constraint hereby enforces that k nearest
neighbours are computed for each region, the second
constraint forbids edges between regions of the same
image, and the last constraint is used to enforce solu-
tion diversity, that is, each of the k nearest neighbours
is located on a different image. Please note, that the
aforementioned parameter k for the number of near-
est neighbours is different from the parameter k of the
clustering step.
Since it is costly to perform an optimization of
Equation 2, instead of computing exact matches,
the problem is relaxed to find (approximate) nearest
neighbours which is done by the modified version of
the generalized PatchMatch algorithm introduced by
(Gould and Zhang, 2012).
To provide an overview of the steps involved in
finding an approximative solution for Equation 2 the
basic idea of each step is outlined below. A more de-
tailed explanation can be found in the original work of
(Gould and Zhang, 2012). In our case, we are inter-
ested in finding the 10 (approximative) nearest neigh-
bours for each given region due to empirical evalua-
tions given by (Gould et al., 2014).
• Initialization: During the initialization phase of
the PM algorithm, a random Nearest Neighbour
Field is set up, thus, the respective regions are
given random correspondence assignments that
account for the constraints in Equation 2. This
step is only performed once and the following
steps are repeated until some halting criteria is
met.
• Propagation: Given good assignments from the
initialization step or from the previous iteration,
Information Efficient Automatic Object Detection and Segmentation using Cosegmentation, Similarity based Clustering, and Graph Label
Transfer
401

the algorithm will propagate these assignments
to neighbouring pixels if the region is coherent.
That is, on even iterations the algorithm will try
to propagate the assignment to the left and top of
the respective pixel in an attempt to improve the
respective neighbouring matches and on odd iter-
ations to the right and bottom. However, the new
assignment will only be propagated if the error is
smaller than the one previously assigned.
• Decaying Search: Designed to avoid getting stuck
in locally optimal solutions, in this step, given a
(good) match between two nodes (u,v), the algo-
rithm randomly samples patches around an expo-
nentially decaying neighbourhood of v to eventu-
ally find better matches. Here, the number of iter-
ations is set to 500.
• Forward Enrichment: This step is designed to
propagate (good) matches along the image set.
The idea was already described above, thus, given
(good) matches (u,v) and (v,w) the edge (u,w) is
believed to be a (good) match as well.
• Local Search: During this step, the algorithm tries
to find a better matching node v
0
in the neighbour-
hood of v given a (good) match (u,v).
• Inverse Enrichment: Originally introduced by the
PatchMatch extension of (Barnes et al., 2010)
which is based on the idea that, given a (good)
match (w, u) it is likely that there is also a good
match (u,w). Thus, if an edge (w,u) is added then
(u,w) is added as well if not already present.
• Exhaustive Search: This can be used as an ini-
tialization for the matches. Therefore, for a few
patches of an image it searches exhaustively for k
nearest neighbours of this patch (in different im-
ages). Though this step is rather expensive, it only
has to be done for a small number of patches so
that the move-steps above are provided with a suf-
ficiently good initialization and, hence, will not
get stuck in far from optimal solutions. Here, the
number of iterations is set to 500.
• Halting Criteria: Iterating through the propaga-
tion and search step, the algorithm halts either
after (soft) convergence, thus, if no assignments
change over a period of some iterations or after a
fix number of iterations.
After the approximation has converged we pro-
ceed to extract the binary masks based on the RC
saliency maps with lowest matching costs and define
them as the common foreground.
Finally, to obtain the overall object cosegmenta-
tions of the images in T we apply GrabCut (Rother
et al., 2004) based on three inputs for model genera-
tion for each image in T: The foreground model taken
from the binary mask with lowest matching costs, the
background model taken from the inverted largest bi-
narized RC mask (mentioned in the first paragraph of
this section), and a “possible” foreground model for
all other pixels that are neither labelled background
nor foreground. As a result we now have a com-
mon foreground (object) / background segmentation
for each image in T .
After the graph is set up, a metric learning ap-
proach is performed to estimate the metric that min-
imizes the distance between UCM regions sharing a
common label while maintaining large distance for re-
gions that do not share a common label (Gould et al.,
2014). This is done exhaustively until convergence.
3.4 Third Step: Label Transfer
Similarly to the previous steps in 3.3.1, 3.3.2, and
3.3.3 we set up a second graph for the label receiving
set R, thus, we perform the UCM over-segmentation
and compute the feature vector as described above for
each image in R. Note that in this case we do not need
to extract the saliency maps, since we are now inter-
ested to transfer the label knowledge from set T to the
new image data in R.
To do this, the approximative optimization of
Equation 2 is now repeated after both graphs (the la-
bel transferring and the label receiving) are merged
with the additional restriction, that edges between re-
gions of the label receiving images are forbidden.
After the approximation has converged, the labels
are then transferred by a majority vote of the akNNs,
thus, for every pixel in every image of R all found
nearest neighbours of its enclosing UCM regions are
evaluated and, if the majority of its regions are la-
belled as common foreground, the corresponding la-
bel (1) is assigned to this pixel and vice versa.
Processing. To handle non-smooth labelling when
using UCMs instead of superpixels, again, a GrabCut
is used to smooth the results.
4 RESULTS AND EVALUATION
Contrarily to other cosegmentation approaches we re-
frained from testing our approach against the com-
monly used iCoseg dataset (Batra et al., 2010) since
on average, there are only around 17 images per class
which, due to the small set size, we consider inappro-
priate for our approach. More importantly, our ap-
proach tries to find exemplary images that describe
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
402

Table 1: Tabular comparison of our method to the related work on MSRC using established quality measures, method Average
Precision (left) and Jaccard Coefficient (right). Methods with best performance per class are marked bold.
MSRC
Average Precision Jaccard Coefficient
Joulin2010 Joulin2012 Rubinstein2013 Ours Joulin2010 Joulin2012 Rubinstein2013 Ours
bike .64 .68 .78 .66 .39 .46 .54 .18
bird .67 .74 .94 .87 .28 .37 .67 .56
car .77 .79 .84 .82 .58 .62 .67 .58
cat .63 .75 .90 .85 .34 .45 .66 .53
chair .75 .68 .88 .83 .46 .40 .62 .52
cow .78 .83 .94 .94 .53 .61 .79 .76
dog .76 .76 .90 .81 .47 .47 .67 .41
face .80 .84 .82 .81 .56 .69 .58 .54
flower .67 .66 .86 .85 .47 .46 .71 .69
house .62 .58 .87 .87 .43 .41 .73 .67
plane .50 .53 .87 .86 .18 .23 .57 .51
sheep .88 .90 .92 .92 .68 .72 .79 .77
sign .79 .75 .93 .88 .56 .52 .82 .68
tree .67 .81 .83 .79 .40 .69 .70 .60
Avg. .71 .74 .88 .84 .45 .51 .68 .57
Table 2: Tabular comparison of our method to the related work on BigSet using established quality measures, namely Average
Precision (left) and Jaccard Coefficient (right). Methods with best performance per class are marked bold.
BigSet
Average Precision Jaccard Coefficient
Joulin2010 Joulin2012 Rubinstein2013 Ours Joulin2010 Joulin2012 Rubinstein2013 Ours
Airplane .59 .59 .88 .92 .37 .35 .56 .60
Car .64 .64 .85 .86 .30 .30 .64 .65
Horse .49 .47 .83 .84 .15 .12 .52 .51
Avg. .57 .57 .85 .87 .28 .25 .57 .59
the object class’ variability reasonably well but on the
iCoseg dataset most of the images share the very same
object with sometimes even the same backgrounds
and viewing conditions. However, we tested our ap-
proach on a compiled version of the MSRC (Microsoft
Research Cambridge) dataset by (Rubinstein et al.,
2013). This compiled version of MSRC consists of
14 classes containing around 30 images each and was
also benchmarked by (Rubinstein et al., 2013) against
the methods of (Joulin et al., 2010) and (Joulin et al.,
2012). It has to be stressed that even on this dataset
there are way too few different object images to rep-
resent the class variability well.
A more appropriate dataset for our case of object
cosegmentation using only a few images to represent
a whole object class is BigSet provided by (Rubinstein
et al., 2013). The set includes three classes each con-
taining 100 images retrieved by querying an image
search using Microsoft’s search engine Bing. This set
is particularly interesting since its corresponding ob-
ject instances are highly diverse. Therefore, we hy-
pothesized that we can compete with the current state
of the art of (Rubinstein et al., 2013).
We measured the segmentation quality according
to the related work, i.e. using the average precision
(although it is a flawed measure on this kind of prob-
lems due to foreground/ background imbalance) as
well as the Jaccard Coefficient.
As can be seen in Table 1 our method performed
worse than (Rubinstein et al., 2013) but outperformed
(Joulin et al., 2010; Joulin et al., 2012) in almost all
classes. The results are not surprising because we im-
plicitly assume some kind of object appearance re-
dundancy when extracting the n neighbours out of
k clusters for cosegmentation, and often, 30 images
are insufficient to capture an object class’ variability.
However, our approach performed reasonably well
and in the magnitude of related work.
Table 2 shows results for the BigSet. Although the
method by (Rubinstein et al., 2013) clearly outper-
formed our approach on MSRC we managed to get
slightly better averaged results on this data set. For
the Airplane100 class our approach found k = 7 clus-
ters and extracted n = 5 images each. Thus, |T | = 35
images/ objects provided enough (and the right) infor-
mation to label the rest of the images appropriately.
For Car100 |T | = 45 with k = 9 and n = 5 were au-
tomatically found and used to perform label transfer.
Finally, for Horse100 the algorithm only found k = 3
clusters with n = 9 images each, a fact we do not be-
Information Efficient Automatic Object Detection and Segmentation using Cosegmentation, Similarity based Clustering, and Graph Label
Transfer
403
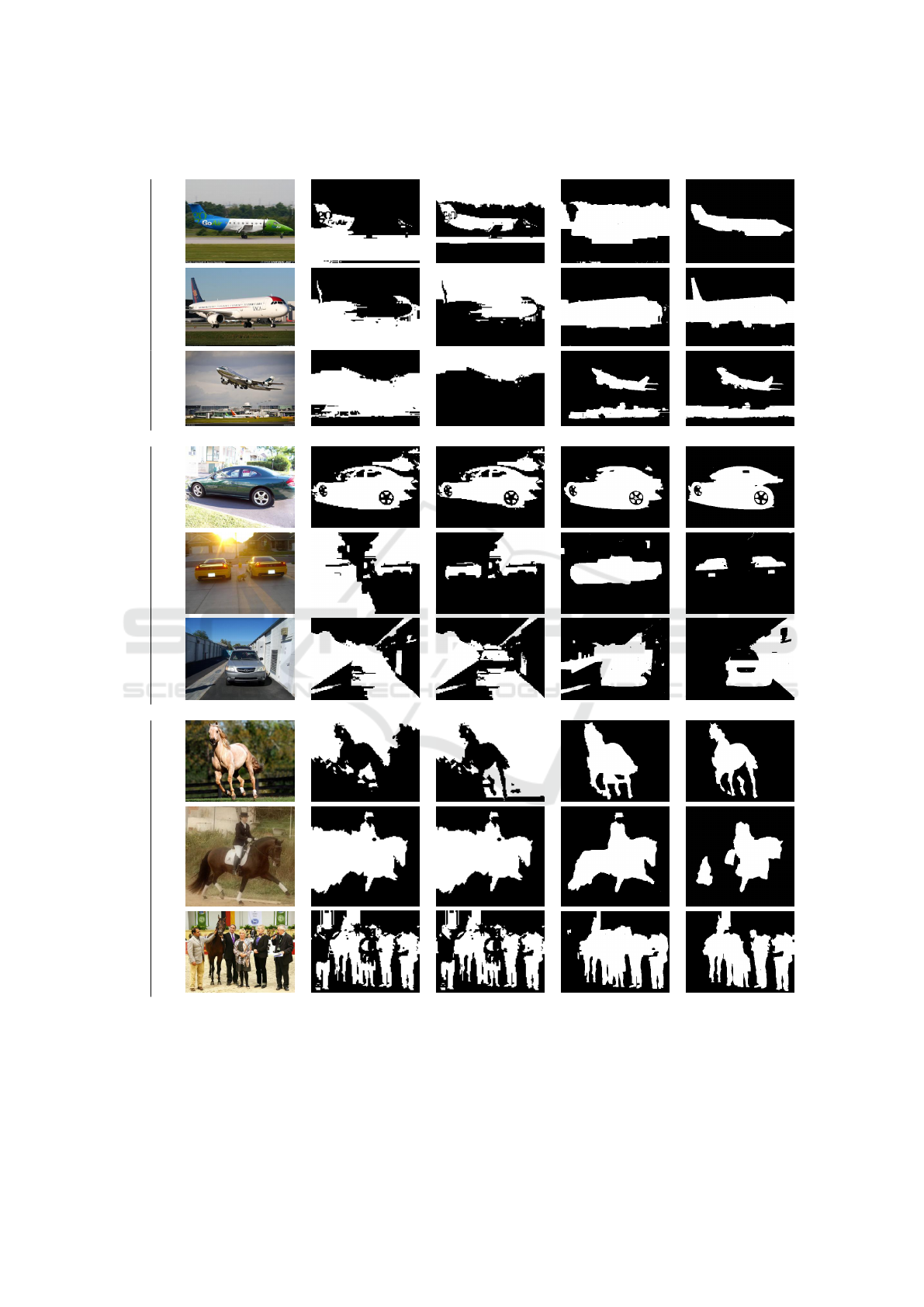
BigSet
Image Joulin2010 Joulin2012 Rubinstein2013 Ours
Airplane
Good
MediumBad
Car
Good
MediumBad
Horse
Good
MediumBad
Figure 3: Visual comparison of our approach to the related work on a selection of images from BigSet. For each class, an
image with bad, medium, and good result quality was selected. The selected images reflect the first, second, and third quantile
of Jaccard Coefficients of our method on each particular class.
lieve corresponds well with the visual object variabil-
ity seen in the Horse100 set.
For visual comparison Figure 3 shows some ex-
ample segmentations compared to (Rubinstein et al.,
2013; Joulin et al., 2012; Joulin et al., 2010).
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
404

5 CONCLUSION AND REMARKS
In this work we have presented an unsupervised ob-
ject cosegmentation approach that overcomes certain
limitations that other state-of-the-art methods exhibit.
We have shown, that most of the current methods
based on MRFs or dense (exact) correspondences are
limited by the fact that they cannot leverage knowl-
edge to new images that need to be segmented.
Our approach is capable of object cosegmenta-
tion yielding state-of-the-art performance while be-
ing scalable to larger image sets and using less in-
formation to infer labels on yet unseen images. Our
results indicate that carefully choosing representative
object class clusters that account for the object class’
intrinsic variability can compensate for information
that needs to be present when cosegmentation is per-
formed over a whole image set. We do note, however,
that the current choice of the transfer set T is based
on simple assumptions about global image statistics
that might not work for images on which the common
foreground is among other objects or on very cluttered
background. Furthermore, the results are promising
and we plan to test our approach on larger image sets
incorporating dynamic updating of the transfer set T
when images are added to the set one after the other.
ACKNOWLEDGEMENTS
This research was partially funded by the project Vi-
sual Analytics in Public Health (TO 166/13-2), which
is part of the Priority Program 1335: Scalable Visual
Analytics of the German Research Foundation.
REFERENCES
Achanta, R., Shaji, A., Smith, K., Lucchi, A., Fua, P., and
S
¨
usstrunk, S. (2012). Slic superpixels compared to
state-of-the-art superpixel methods. IEEE transac-
tions on pattern analysis and machine intelligence,
34(11):2274–2282.
Arbelaez, P. (2006). Boundary extraction in natural images
using ultrametric contour maps. In 2006 Conference
on Computer Vision and Pattern Recognition Work-
shop (CVPRW’06), page 182.
Barnes, C., Shechtman, E., Finkelstein, A., and Goldman,
D. B. (2009). Patchmatch: A randomized corre-
spondence algorithm for structural image editing. In
Funkhouser, T. and Hoppe, H., editors, ACM SIG-
GRAPH 2009 papers, page 1.
Barnes, C., Shechtman, E., Goldman, D. B., and Finkel-
stein, A. (2010). The generalized patchmatch corre-
spondence algorithm. In Daniilidis, K., Maragos, P.,
and Paragios, N., editors, Computer Vision – ECCV
2010, volume 6313 of Lecture Notes in Computer
Science, pages 29–43. Springer Berlin Heidelberg,
Berlin, Heidelberg.
Batra, D., Kowdle, A., Parikh, D., Luo, J., and Chen, T.
(2010). icoseg: Interactive co-segmentation with in-
telligent scribble guidance. In 2010 IEEE Conference
on Computer Vision and Pattern Recognition (CVPR),
pages 3169–3176.
Boykov, Y. Y. and Jolly, M.-P. (2001). Interactive graph
cuts for optimal boundary & region segmentation of
objects in n-d images. In Eighth IEEE International
Conference on Computer Vision, pages 105–112.
Cheng, M.-M., Zhang, G.-X., Mitra, N. J., Huang, X., and
Hu, S.-M. (2011). Global contrast based salient re-
gion detection. In 2011 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
409–416.
Faktor, A. and Irani, M. (2012). “clustering by composi-
tion” – unsupervised discovery of image categories.
In Daniilidis, K., Maragos, P., and Paragios, N., edi-
tors, Computer Vision – ECCV 2012, volume 7578 of
Lecture Notes in Computer Science, pages 474–487.
Springer Berlin Heidelberg, Berlin, Heidelberg.
Faktor, A. and Irani, M. (2013). Co-segmentation by com-
position. In 2013 IEEE International Conference on
Computer Vision (ICCV), pages 1297–1304.
Felzenszwalb, P. F., Girshick, R. B., McAllester, D., and
Ramanan, D. (2010). Object detection with discrim-
inatively trained part-based models. Pattern Analy-
sis and Machine Intelligence, IEEE Transactions on,
32(9):1627–1645.
Gould, S. (2012). Darwin: A framework for machine learn-
ing and computer vision research and development.
Journal of Machine Learning Research, 13(1):3533–
3537.
Gould, S. and Zhang, Y. (2012). Patchmatchgraph: Build-
ing a graph of dense patch correspondences for label
transfer. In Daniilidis, K., Maragos, P., and Paragios,
N., editors, Computer Vision – ECCV 2012, volume
7576 of Lecture Notes in Computer Science, pages
439–452. Springer Berlin Heidelberg, Berlin, Heidel-
berg.
Gould, S., Zhao, J., He, X., and Zhang, Y. (2014). Super-
pixel graph label transfer with learned distance metric.
In Fleet, D., Pajdla, T., Schiele, B., and Tuytelaars, T.,
editors, Computer Vision – ECCV 2014, volume 8689
of Lecture Notes in Computer Science, pages 632–
647. Springer International Publishing, Cham.
Hochbaum, D. S. and Singh, V. (2009). An efficient al-
gorithm for co-segmentation. In 2009 IEEE 12th In-
ternational Conference on Computer Vision (ICCV),
pages 269–276.
Joulin, A., Bach, F., and Ponce, J. (2010). Discriminative
clustering for image co-segmentation. In 2010 IEEE
Conference on Computer Vision and Pattern Recogni-
tion (CVPR), pages 1943–1950.
Joulin, A., Bach, F., and Ponce, J. (2012). Multi-class
cosegmentation. In 2012 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
542–549.
Information Efficient Automatic Object Detection and Segmentation using Cosegmentation, Similarity based Clustering, and Graph Label
Transfer
405

Mukherjee, L., Singh, V., and Dyer, C. R. (2009). Half-
integrality based algorithms for cosegmentation of im-
ages. In 2009 IEEE Computer Society Conference on
Computer Vision and Pattern Recognition Workshops
(CVPR Workshops), pages 2028–2035.
Ojala, T., Pietik
¨
ainen, M., and Harwood, D. (1996). A com-
parative study of texture measures with classification
based on featured distributions. Pattern Recognition,
29(1):51–59.
Ojala, T., Pietikainen, M., and Maenpaa, T. (2002). Mul-
tiresolution gray-scale and rotation invariant texture
classification with local binary patterns. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
24(7):971–987.
Oliva, A. and Torralba, A. (2001). Modeling the shape
of the scene: A holistic representation of the spatial
envelope. International Journal of Computer Vision,
42(3):145–175.
Rother, C., Kolmogorov, V., and Blake, A. (2004). Grabcut
-interactive foreground extraction using iterated graph
cuts. ACM Transactions on Graphics (SIGGRAPH).
Rother, C., Minka, T., Blake, A., and Kolmogorov, V.
(2006). Cosegmentation of image pairs by histogram
matching - incorporating a global constraint into mrfs.
In Computer Vision and Pattern Recognition, 2006
IEEE Computer Society Conference on, volume 1,
pages 993–1000.
Rubinstein, M., Joulin, A., Kopf, J., and Liu, C. (2013). Un-
supervised joint object discovery and segmentation in
internet images. In 2013 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
1939–1946.
Shechtman, E. and Irani, M. (2007). Matching local self-
similarities across images and videos. In 2007 IEEE
Conference on Computer Vision and Pattern Recogni-
tion, pages 1–8.
Vicente, S., Kolmogorov, V., and Rother, C. (2010). Coseg-
mentation revisited: Models and optimization. In
Daniilidis, K., Maragos, P., and Paragios, N., edi-
tors, Computer Vision – ECCV 2010, volume 6312 of
Lecture Notes in Computer Science, pages 465–479.
Springer Berlin Heidelberg, Berlin, Heidelberg.
Vicente, S., Rother, C., and Kolmogorov, V. (2011). Object
cosegmentation. In 2011 IEEE Conference on Com-
puter Vision and Pattern Recognition (CVPR), pages
2217–2224.
Zhang, H., Fang, T., Chen, X., Zhao, Q., and Quan, L.
(2011). Partial similarity based nonparametric scene
parsing in certain environment. In 2011 IEEE Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 2241–2248.
ICPRAM 2016 - International Conference on Pattern Recognition Applications and Methods
406
