
Extension of the Model-based Pre-step Stabilization Method for
Non-iterative Co-simulation
Including Direct-feedthrough
Simon Genser and Martin Benedikt
Virtual Vehicle Research Center, Inffeldgasse 21a, Graz, Austria
Keywords:
Pre-step Stabilization, Co-simulation, Weak Coupling, Interface Jacobians.
Abstract:
For integration of subsystems co-simulation tools and master algorithms have to cope with the problem of re-
stricted access to subsystem information. Especially for efficient handling of inherent properties like stiffness
and direct feedthrough of industrial co-simulations additional subsystem information is mandatory. As pro-
vision of dedicated partial derivatives, especially regarding subsystem states, is complex and computationally
expensive, recently a novel pre-step co-simulation approach for handling stiff system simulations based on for-
mal subsystem transformations was proposed. The approach follows the idea of the Nearly Energy Preserving
Coupling Element (NEPCE) scheme where exclusively subsystem inputs are modified for compensation of the
co-simulation discretization error. This paper outlines a generalization of the presented pre-step co-simulation
method for handling stiffness and direct feedthrough of subsystems. The generalized pre-step co-simulation
algorithm is examined along a theoretical 2 DoF benchmark co-simulation example indicating outstanding
co-simulation performance.
1 INTRODUCTION
Nowadays, usage of numerical simulation for design,
analysis and engineering of technical systems is com-
mon practice in industry and a lot of different mod-
elling approaches and tailored numerical solvers are
available. When it comes to holistic system consid-
erations typically subsystem simulations from differ-
ent domains, departments or companies have to be in-
tegrated and co-simulation is the preferred solution
(Arnold, 2006). This way, subsystems are handled
as black-boxes with defined interfaces for the control
and the exchange of inputs and outputs and higher-
level integration schemes are necessary for synchro-
nization purposes, i.e. master algorithms (Bastian
et al., 2011). As in classical numerical simulation
the evaluation of the right-hand side of the govern-
ing subsystem equations is crucial for efficient treat-
ment of overall stiff co-simulations and related Jacobi
matrices are typically used by the master algorithm
when linear subsystem behaviour can be assumed.
Accessing subsystem model information itself has to
be supported by the simulation tools via enhanced co-
simulation capabilities or by implementation of the
Functional Mock up Interface, a standard for model
exchange and integration for data exchange and con-
trol of subsystem simulations. Especially FMI 2.0
supports the exchange of partial derivatives of sub-
system models.
Utilization of the right-hand side evaluations of sub-
systems – partial derivatives of subsystem models
- by master algorithms is beneficial for improving
overall co-simulation performance and, on the other
hand, mandatory for handling dedicated properties
and characteristics of the co-simulation at hand. As
co-simulation is typically applied in cases where it is
impossible to port and assemble the individual sub-
system simulations into a standalone, multi-purpose
simulation model and its related tool, due to missing
modelling features or tailored solvers, rather complex
subsystems have to be integrated. These subsystems
most often possess properties like stiffness and direct
feedthrough.
Similar to classical numerical simulation stiffness is
addressed by implicit schemes or at least explicit
ones with implicit behavior, e.g. linearly-implicit ap-
proaches (Rosenbrock W-methods) (Cellier and Kof-
man, 2010). Direct feedthrough represents a subsys-
tem property which influences overall system stabil-
ity. Assuming the assembled overall system is stable
(Kuebler and Schiehlen, 2000), direct feedthroughs of
individual subsystems introduce proportional input-
Genser, S. and Benedikt, M.
Extension of the Model-based Pre-step Stabilization Method for Non-iterative Co-simulation - Including Direct-feedthrough.
DOI: 10.5220/0006848002230231
In Proceedings of 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications (SIMULTECH 2018), pages 223-231
ISBN: 978-989-758-323-0
Copyright © 2018 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
223

output dependencies of subsystems, affecting per-
formance
1
of the master algorithms too. Some ap-
proaches are published (Arnold, 2006; Sicklinger
et al., 2013; Sadjina et al., 2016; Viel, 2014) to cope
with direct feedthrough. In contrast, recently, another
non-iterative approach was proposed based on formal
subsystem transformations and the utilization of sub-
systems Interface Jacobians exclusively, referred to as
NECPE-II (Genser and Benedikt, 2018), in order to
reduce the computational burden on subsystem side.
Within this paper the proposed algorithm is general-
ized for handling of subsystems direct feedthroughs.
The paper is organized as follows: Section 2 contains
the detailed derivation of the pre-step stabilization
algorithm. In Section 3 the improved performance
of the presented algorithm is illustrated by a 2 DoF
benchmark co-simulation example.
2 PRE-STEP ALGORITHM
The aim of this paper is to generalize the model-based
pre-step stabilization method (NEPCE-II) for the non-
iterative co-simulation (Genser and Benedikt, 2018)
in order to handle additionally direct feedthroughs of
subsystems.
2.1 System Description
The state-space representation (Dorf and Bishop,
2017) of subsystem S
i
:
˙x
i
(t) = A
i
· x
i
(t) + B
i
· u
i
(t) (1)
y
i
(t) = C
i
· x
i
(t) + D
i
· u
i
(t) (2)
is a suitable option to include direct feedthrough. The
condition:
D
i
6= 0,
for least an i = 1, . . . , N assures the presence of a
direct feedthrough, whereby N denotes the number
of subsystems included in the overall co-simulation.
Compared to the output-based system description in
in (Genser and Benedikt, 2018), the herein used one
(3) has an additional term, presented by ˙u
i
:
˙y
i
= S
i
(y
i
, u
i
, ˙u
i
). (3)
The proposed pre-step coupling algorithm is based on
the linearization of (3) around (0, 0, 0):
˙y
i
≈ S
i
(0, 0, 0)+
∂S
i
∂y
· y
i
+
∂S
i
∂u
· u
i
+
∂S
i
∂ ˙u
· ˙u
i
.
1
Note: In the context of co-simulation, handling of direct
feedthroughs is different to handling differential algebraic
equations, as direct feedthroughs are not stating constraints
on subsystem states.
Without loss of generality one can assume that
S
i
(0, 0, 0) = 0, which leads to the transformed lin-
earized output-based subsystem description:
˙y
i
≈
∂S
i
∂y
· y
i
+
∂S
i
∂u
· u
i
+
∂S
i
∂ ˙u
· ˙u
i
. (4)
As complete partial-derivatives are typically difficult
to be accessed, in most cases a linear approximation
of the subsystems is used. Especially this is specified
by the Functional Mock up Interface 2.0 (Blochwitz,
2012). Therefore a connection between this represen-
tation an the utilized output-based description (4) is
desirable. The derivation of this transformation starts
with the time derivative of (2):
˙y
i
= C
i
· ˙x
i
+ D
i
· ˙u
i
.
Substituting (1) leads to:
˙y
i
= C
i
· (A
i
· x
i
+ B
i
· u
i
) + D
i
· ˙u
i
. (5)
Rearranging (2) and inserting into (5) results in:
˙y
i
= C
i
·
A
i
·C
−1
i
· (y
i
− D
i
· u
i
) + B
i
· u
i
+ D
i
· ˙u
i
.
From algebraic rearrangements follows:
˙y
i
=
C
i
· A
i
·C
−1
i
· y
i
+ . . .
. . .
C
i
· B
i
−C
i
· A
i
·C
−1
i
· D
i
· u
i
+ D
i
· ˙u
i
.
Comparing this equation to (4) directly turns out the
related transformation rules
2
:
∂S
i
∂y
= C
i
· A
i
·C
−1
i
,
∂S
i
∂u
= C
i
· B
i
−C
i
· A
i
·C
−1
i
· D
i
,
∂S
i
∂ ˙u
= D
i
.
In case of black-box subsystems, system identi-
fication methods are used to approximate (4) di-
rectly. There are different system identification meth-
ods available. The herein preferred ones, due to
their ability to identify direct feedthrough, are the
so-called subspace methods (Overschee and Moor,
1996; Trnka, 2005), especially the Multivariable
Output-Error State Space (MOESP) algorithm, see
(Katayama, 2005).
2.2 Derivation of the Algorithm
To keep the notation in the following derivation of the
algorithm as simple as possible the following assump-
tions are made:
2
For generalization purposes the term C
−1
i
represents the
pseudo-inverse.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
224

• the macro-step size ∆T and the micro-step size δT
are fixed for the whole computation time and for
all subsystems (i.e. ∆T
k
i
= ∆T , δT
k
i
= δT );
• the overall co-simulation consists of two fully
coupled subsystems (i.e. u
1
= y
2
, u
2
= y
1
at the
coupling instants and N = 2);
• the input and output signals u, y are scalars for
both subsystems;
• the output y describes a time continuous signal.
As outlined in (Genser and Benedikt, 2018) also the
generalized algorithm contains three main steps as il-
lustrated in Figure 1:
1. approximate the exact, monolithic output ˜y utiliz-
ing the global Error Differential Equation;
2. perform a global model-based extrapolation ˆy of
the output;
3. based on the extrapolation ˆy perform a local opti-
mization of the input u for every subsystem indi-
vidually.
From an abstract point of view these steps basically
comply with the ones in (Genser and Benedikt, 2018)
but differs in important details. To outline the dif-
ferences the complete derivation of the main steps is
given in the subsections below.
2.2.1 Step 1: Solving the Error Differential
Equation
To approximate the exact, monolithic solution ˜y
i
over
the last macro-step [T
k−1
, T
k
], see Step 1 in Figure 1,
of a subsystem the so-called Error Differential Equa-
tion is solved and its derivation is based on the sub-
system description (3) and two important cases:
Ideal coupling of the two subsystems:
˙
˜y
1
= S
1
( ˜y
1
, ˜y
2
,
˙
˜y
2
) (6)
˙
˜y
2
= S
2
( ˜y
2
, ˜y
1
,
˙
˜y
1
) (7)
Coupling by co-simulation:
˙y
1
= S
1
(y
1
, u
1
, ˙u
1
) (8)
˙y
2
= S
2
(y
2
, u
2
, ˙u
2
) (9)
Comparing (6) with (8):
˙y
1
− S
1
(y
1
, u
1
, ˙u
1
) =
˙
˜y
1
− S
1
( ˜y
1
, ˜y
2
,
˙
˜y
2
),
rearranging and the definition of δ
i
:= ˜y
i
−y
i
, see Fig-
ure 1, leads to:
S
1
( ˜y
1
, ˜y
2
,
˙
˜y
2
) − S
1
(y
1
, u
1
, ˙u
1
) =
˙
˜y
1
− ˙y
1
|
{z }
˙
δ
1
. (10)
Rearranging and substituting ε
1
:= y
2
− u
1
and
ε
2
:= y
1
− u
2
, see Figure 1, into (10) leads to:
˙
δ
1
=S
1
(u
2
+ ε
2
+ δ
1
, y
2
+ δ
2
, ˙y
2
+
˙
δ
2
) − . . .
. . .S
1
(u
2
+ ε
2
, y
2
− ε
1
, ˙y
2
−
˙
ε
1
)
Evaluating
3
the equation in T
k
leads to:
˙
δ
1
=S
1
(u
k
2
+ ε
2
+ δ
1
, y
k
2
+ δ
2
, ˙y
k
2
+
˙
δ
2
) − . . .
. . .S
1
(u
k
2
+ ε
2
, y
k
2
− ε
1
, ˙y
k
2
−
˙
ε
1
).
From the spatial linearization based on the Taylor-
series, with the center of the series in (u
k
2
:=
u
2
(T
k
), y
k
2
:= y
2
(T
k
), ˙y
k
2
:= ˙y
2
(T
k
)) it follows
S
1
(u
k
2
, y
k
2
, ˙y
k
2
) +
∂S
1
∂y
· (ε
2
+ δ
1
) +
∂S
1
∂u
· δ
2
+ . . .
. . .
∂S
1
∂ ˙u
·
˙
δ
2
− S
1
(u
k
2
, y
k
2
, ˙y
k
2
) −
∂S
1
∂y
· (ε
2
) + . . .
. . .
∂S
1
∂u
· ε
1
+
∂S
1
∂ ˙u
·
˙
ε
1
≈
˙
δ
1
.
From algebraic rearrangements follows the final ordi-
nary Error Differential Equation
˙
δ
1
≈
∂S
1
∂y
· δ
1
+
∂S
1
∂u
· [δ
2
+ ε
1
] +
∂S
1
∂ ˙u
· [
˙
δ
2
+
˙
ε
1
].
(11)
Via symmetry for (7) and (9) it follows:
˙
δ
2
≈
∂S
2
∂y
· δ
2
+
∂S
2
∂u
· [δ
1
+ ε
2
] +
∂S
2
∂ ˙u
· [
˙
δ
1
+
˙
ε
2
].
(12)
The fact that the two ordinary differential equa-
tions above are coupled motivates to write them in
vector and matrix notation
˙
δ
1
˙
δ
2
|{z}
=:
˙
δ
δ
δ
=
∂S
1
∂y
∂S
1
∂u
∂S
2
∂u
∂S
2
∂y
!
| {z }
=:
˜
A
·
δ
1
δ
2
|{z}
=:δ
δ
δ
+
∂S
1
∂u
0
0
∂S
2
∂u
!
| {z }
=:
˜
B
·
ε
1
ε
2
|{z}
=:ε
ε
ε
+
0
∂S
1
∂ ˙u
∂S
2
∂ ˙u
0
!
| {z }
=:
˜
C
·
˙
δ
1
˙
δ
2
|{z}
=:
˙
δ
δ
δ
+
∂S
1
∂ ˙u
0
0
∂S
2
∂ ˙u
!
| {z }
=:
˜
D
·
˙
ε
1
˙
ε
2
|{z}
=:
˙
ε
ε
ε
.
Rearranging this equation leads to
(I −
˜
C) ·
˙
δ
δ
δ =
˜
A · δ
δ
δ +
˜
B · ε
ε
ε +
˜
D ·
˙
ε
ε
ε,
where I denotes an identity matrix from appropriate
dimension. With the use of the pseudo inverse (I −
˜
C)
−1
the final Error Differential Equation for results
in
˙
δ
δ
δ = (I −
˜
C)
−1
·
˜
A · δ
δ
δ +
˜
B · ε
ε
ε +
˜
D ·
˙
ε
ε
ε
. (13)
Note: Due to the definition of δ and the assumption
that y is continuous it follows that δ is continuous as
well. This leads naturally to the initial conditions for
δ, combining this with the equation above leads to a
initial value problem for the computation of the exact
output ˜y in [T
k−1
, T
k
].
3
For δ
i
and ε
i
the sub index k is omitted for sake of simplic-
ity.
Extension of the Model-based Pre-step Stabilization Method for Non-iterative Co-simulation - Including Direct-feedthrough
225
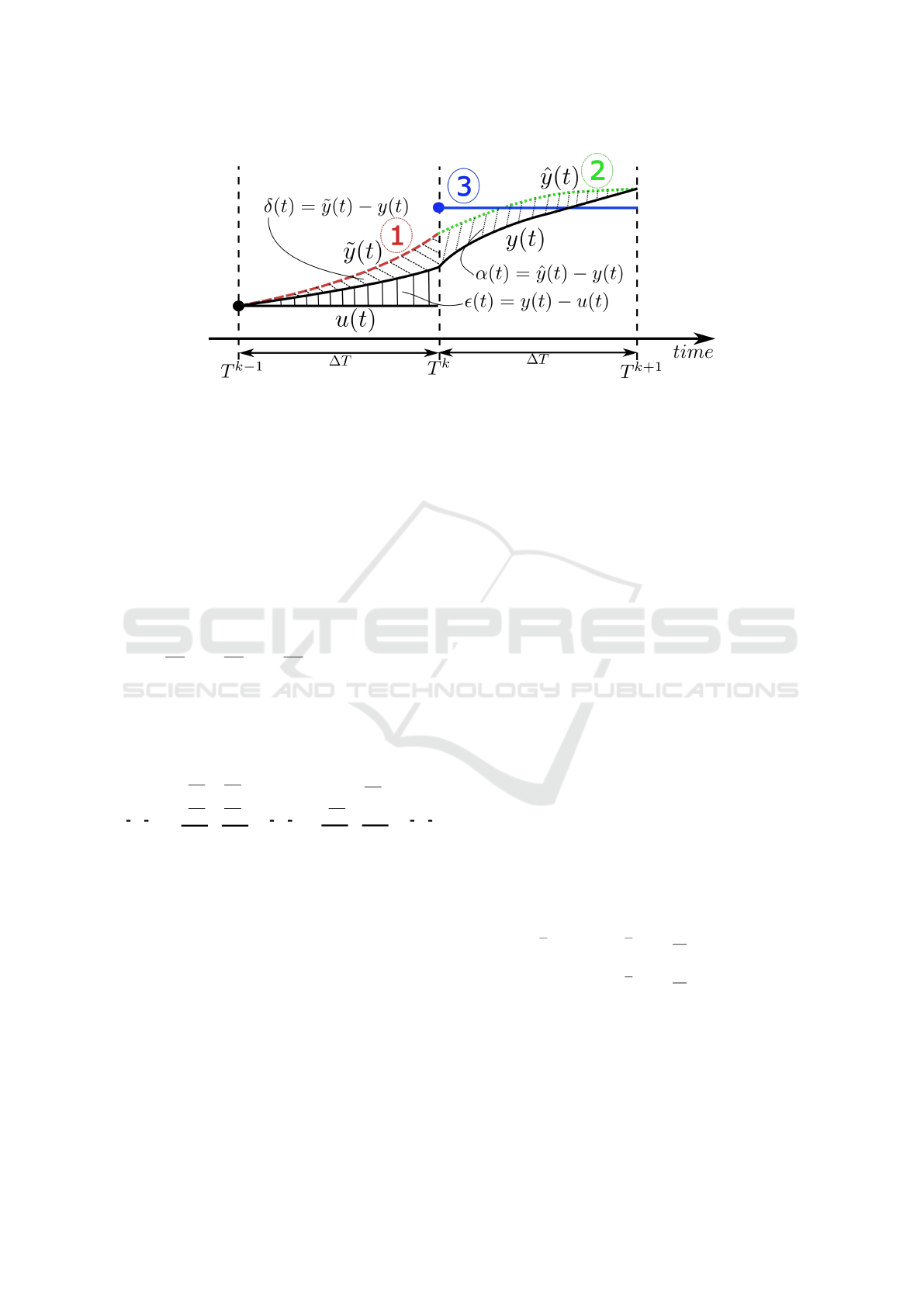
Figure 1: Illustration of the model-based pre-step stabilization algorithm (Genser and Benedikt, 2018).
2.2.2 Step 2: Model-based Extrapolation
The model-based extrapolation of the overall system
ensures the implicit behaviour of the algorithm. The
idea is to predict the future progress of the exact solu-
tion ˆy over the next macro-step ∆T , depicted as Step 2
in Figure 1. By the exact solution is the monolithic so-
lution meant, i.e. all errors due to the weak coupling
vanish. The differential equation for the extrapolation
is based on the assumption of ideal coupling between
the subsystems and the system description (4).
The derivation of the differential equation starts with
˙
ˆy
i
≈
∂S
i
∂y
· ˆy
i
+
∂S
i
∂u
· u
i
+
∂S
i
∂ ˙u
· ˙u
i
for i = 1, 2. (14)
Assuming ideal coupling between subsystems
ˆy
1
= u
2
,
ˆy
2
= u
1
and inserting this in equation (14) leads to:
˙
ˆy
1
˙
ˆy
2
|{z}
=:
˙
ˆ
y
y
y
=
∂S
1
∂y
∂S
1
∂u
∂S
2
∂u
∂S
2
∂y
!
| {z }
=:
ˆ
A
·
ˆy
1
ˆy
2
|{z}
=:
ˆ
y
y
y
+
0
∂S
1
∂ ˙u
∂S
2
∂ ˙u
0
!
| {z }
=:
ˆ
B
·
˙
ˆy
1
˙
ˆy
2
|{z}
=:
˙
ˆ
y
y
y
Rearranging this equation and utilizing the pseudo-
inverse (I −
ˆ
B)
−1
results in the final differential equa-
tion:
˙
ˆ
y
y
y = (I −
ˆ
B)
−1
·
ˆ
A ·
ˆ
y
y
y. (15)
Note: The initial condition for (15) comes from
the solution of the Error Differential Equation, i.e.
ˆy(T
k
) = ˜y(T
k
) for the extrapolation over [T
k
, T
k+1
],
leading to a initial value problem for every macro time
step.
2.2.3 Step 3: Pre-step Input Optimization
The local optimization of the input u
i
represents the
third main part of the presented algorithm, for illus-
tration see Figure 1. Local means that this part can be
computed for every subsystem individually and inde-
pendent from the other subsystems, therefore the sub
index i is omitted in this subsection. The optimization
is based on the error:
α := ˆy − y. (16)
The idea is to choose the input u so that α is mini-
mized over the next macro-step:
min
t∈[T
k
,T
k+1
]
|α(t)| (17)
There are different ways to solve the optimization
problem (17), herein the focus lies on a discretized
solution, based on the macro-step, i.e. (17) is trans-
formed into:
|α
k+1
|
!
= 0, with α
k+1
:= α(T
k+1
) (18)
The discretization (18) of the optimization problem
leads, with the definition (16), to
ˆy
k+1
!
= y
k+1
, (19)
where ˆy
k+1
:= ˆy(T
k+1
) and y
k+1
:= y(T
k+1
). For ex-
plicitly solving this problem the dependency of the
output y
k+1
on the input u
k
has to be exploited. To
describe this relation a close look on the system de-
scription (4) and standard theory of ordinary differen-
tial equations is needed. The analytical solution of (4)
is described through:
y(t) = e
∂S
∂y
·t
· y
0
+
Z
t
t
start
e
∂S
∂y
·(t−τ)
·
∂S
∂u
· u(τ) dτ + . . .
. . .
Z
t
t
start
e
∂S
∂y
·(t−τ)
·
∂S
∂ ˙u
· ˙u(τ) dτ,
(20)
where y
0
denotes the initial condition. The derivative
˙u denotes the classical time derivative which is com-
puted piecewise for every macro-step. Due to the ap-
pearance of ˙u in (20) the choice of piecewise constant
basic functions is a bad one because ˙u would be zero
all the time and so the second integral in (20) would
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
226

be always neglected and this would lead to a worse
approximation. That is the reason that piecewise lin-
ear basic functions are utilized to describe the input u
in the following, i.e. the preferred approach for u is
u(t) = u
k
0
+ s
k
·t for t ∈ [T
k
, T
k+1
], (21)
where u
k
0
= y(T
k
), with y representing the output from
the coupled subsystem. The slope of u in the macro-
step [T
k
, T
k+1
] is denoted with s
k
. Inserting this ap-
proach in (20) leads to
y(t) =e
∂S
∂y
·t
· y
0
+
k
∑
l=0
Z
T
l+1
T
l
e
∂S
∂y
·(t−τ)
·
∂S
∂u
· . . .
. . .(u
l
0
+ s
l
· τ) dτ +
k
∑
l=0
Z
T
l+1
T
l
e
∂S
∂y
·(t−τ)
·
∂S
∂ ˙u
· s
l
dτ.
The separation and summation of the integrals in the
macro-steps is necessary due to the piecewise defini-
tion of u in (21). With T
0
= t
start
the starting time of
the overall co-simulation is denoted and for the lack
of simplicity ∆T and k are chosen so that T
k+1
= t
holds. Rearranging the last equation results in
y(t) = e
∂S
∂y
·t
· y
0
+
k
∑
l=0
u
l
0
·
Z
T
l+1
T
l
e
∂S
∂y
·(t−τ)
·
∂S
∂u
dτ + . . .
(22)
. . .
k
∑
l=0
s
l
·
Z
T
l+1
T
l
e
∂S
∂y
·(t−τ)
·
∂S
∂u
· τ dτ + . . . (23)
. . .
k
∑
l=0
s
l
·
Z
T
l+1
T
l
e
∂S
∂y
·(t−τ)
·
∂S
∂ ˙u
dτ, (24)
with
φ
A
(t) := e
∂S
∂y
·t
,
φ
B
l
(t) :=
Z
T
l+1
T
l
e
∂S
∂y
·(t−τ)
·
∂S
∂u
dτ,
φ
C
l
(t) :=
Z
T
l+1
T
l
e
∂S
∂y
·(t−τ)
·
∂S
∂u
· τ dτ,
φ
D
l
(t) :=
Z
T
l+1
T
l
e
∂S
∂y
·(t−τ)
·
∂S
∂ ˙u
dτ,
it is possible to write the analytic solution of y as
y(t) = φ
A
(t) · y
0
+
k
∑
l=0
u
l
0
· φ
B
l
(t) + . . .
. . . s
l
·
φ
C
l
(t) + φ
D
l
(t)
. (25)
To fulfil (19) it is necessary to evaluate (25) in T
k+1
,
this leads to
y
k+1
= φ
A
(T
k+1
) · y
0
+
k
∑
l=0
u
l
0
· φ
B
l
(T
k+1
) + . . .
. . .
k
∑
l=0
s
l
·
φ
C
l
(T
k+1
) + φ
D
l
(T
k+1
)
.
Recursive inserting of the equation above leads to
y
k+1
=φ
A
(∆
T
) · y
k
+ u
k
0
· φ
B
k
(T
k+1
) + . . .
. . .s
k
·
φ
C
k
(T
k+1
) + φ
D
k
(T
k+1
)
. (26)
Remark: φ
A
(∆
T
), φ
B
k
(T
k+1
), . . . , φ
D
k
(T
k+1
) denote
matrices with constant coefficients. Similar to the
transitions matrices for the standard state-space rep-
resentation see (Dorf and Bishop, 2017).
Therefore (26) can be seen as an algebraic computa-
tion equation, the time variable and the sub index k
are omitted, denoted as
y
k+1
= φ
A
· y
k
+ φ
B
· u
k
0
+ s
k
· (φ
C
+ φ
D
). (27)
Inserting (27) into (19) results in
ˆy
k+1
= φ
A
· y
k
+ φ
B
· u
k
0
+ s
k
· (φ
C
+ φ
D
) (28)
As it is the case, that y
k
and u
k
0
is known from the pre-
vious macro time increment and ˆy
k+1
is given due to
the extrapolation, see Section 2.3.2, it is now possible
to determine s
k
through
s
k
= (φ
C
+ φ
D
)
−1
·
ˆy
k+1
− φ
A
· y
k
+ φ
B
· u
k
0
. (29)
It should be mentioned that, this input optimization
is computed locally and can therefore be easily per-
formed in parallel.
Remark: Comparing this derivation herein with the
basic algorithm in (Genser and Benedikt, 2018) leads
to the conclusion that a direct feedthrough in a sub-
system leads to additional terms in the subsystem de-
scription, see (4). These additional terms are the rea-
son for the differences in the derivation of the three
main steps. Setting the direct feedthrough terms to
zero, the algorithm is exactly the same as in the one
in (Genser and Benedikt, 2018), therefore the herein
presented method is a true generalization of model-
based pre-step stabilization. The generalization of
this algorithm to a co-simulation consisting of more
than two subsystems is straightforward, utilizing the
coupling matrix L (L · y = u) properly.
3 THEORETICAL EXAMPLE
To illustrate the improved performance of the herein
presented algorithm a force-displacement coupled
two-degrees of freedom oscillator has been chosen,
see (Benedikt et al., 2013; Busch, 2012). The classi-
cal First-Order-Hold (FOH), the linearly-implicit sta-
bilization (Arnold, 2011) and the energy-preserving
approach (NEPCE) (Benedikt and Hofer, 2013) are
utilized to compare the presented pre-step coupling
algorithm with state of the art methods.
Extension of the Model-based Pre-step Stabilization Method for Non-iterative Co-simulation - Including Direct-feedthrough
227
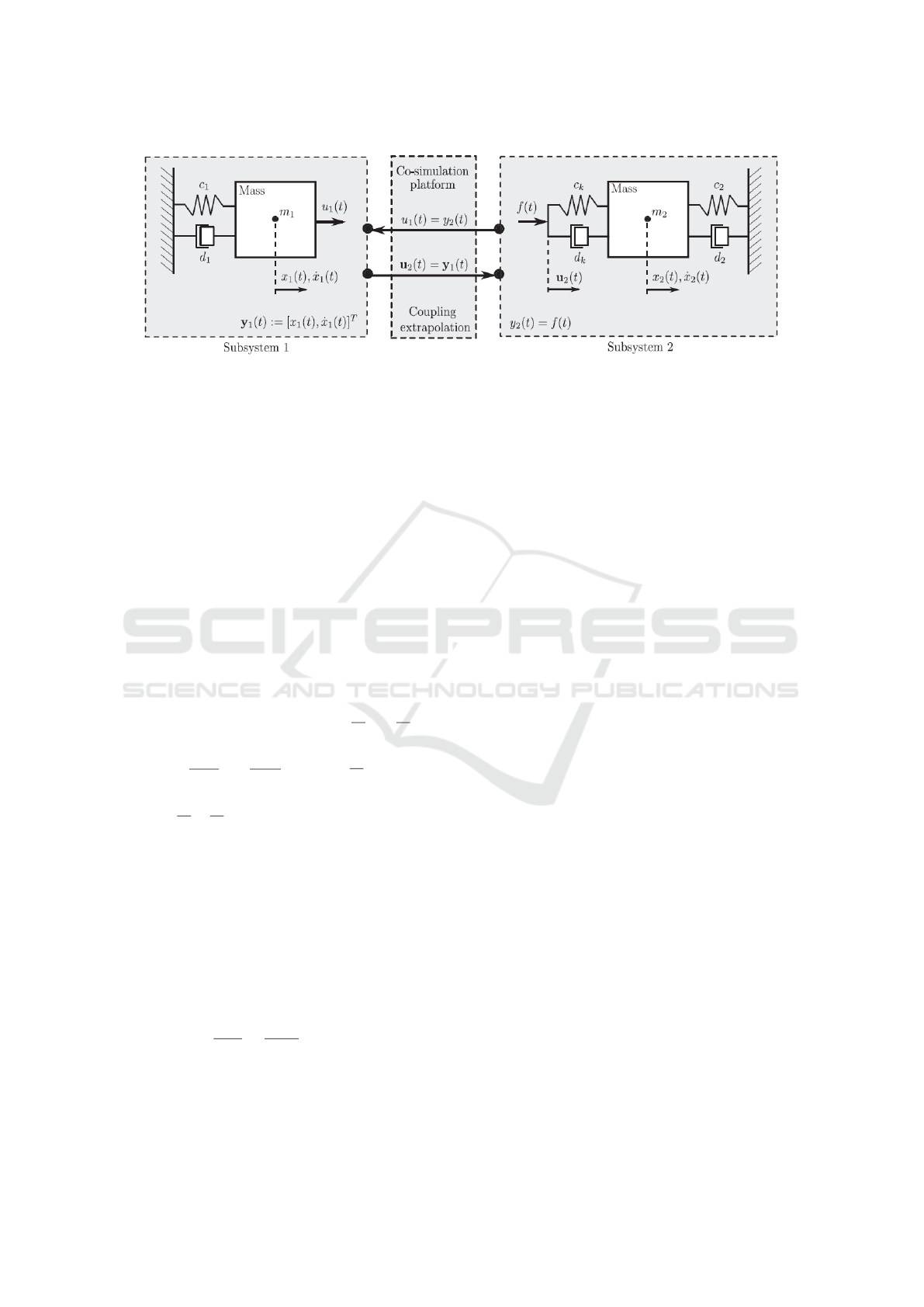
Figure 2: Co-simulation setup of a coupled 2-DOF oscillator, see (Benedikt et al., 2013).
3.1 Two Degree-of-Freedom Oscillator
The preferred example represents a two degree-of-
freedom (DoF) mechanical oscillator and is sepa-
rated into two subsystems (Fig. 2), including a direct
feedthrough in the second subsystem; the state-space
representation of the subsystems is given by:
˙
x
x
x
1
= A
1
· x
x
x
1
+ B
1
· u
1
, (30)
y
y
y
1
= C
1
· x
x
x
1
(31)
and
˙
x
x
x
2
= A
2
· x
x
x
2
+ B
2
· u
u
u
2
, (32)
y
2
= C
2
· x
x
x
2
+ D
2
· u
u
u
2
(33)
with
x
x
x
1
=
x
1
˙x
1
, x
x
x
2
=
x
2
˙x
2
, A
1
=
0 1
−
c
1
m
1
−
d
1
m
1
,
A
2
=
0 1
−
c
2
+c
k
m
2
−
d
2
+d
k
m
2
, B
1
=
0
1
m
1
,
B
2
=
0 0
k
m
2
d
k
m
2
, C
1
=
1 0
0 1
,
C
2
=
c
k
d
k
, D
2
=
−c
k
−d
k
.
Choosing parameters like:
m
1
= 10 kg, m
2
= 10 kg, c
1
= 10
6
Nm
−1
,
c
2
= 10
7
Nm
−1
, d
1
= 1 Nsm
−1
, d
2
= 2 Nsm
−1
,
c
k
= 10
5
Nm
−1
, d
k
= 10
3
Nsm
−1
,
t
start
= 0, t
end
= 0.5,
results in an overall stiffness:
λ
max
λ
min
=
−10
4
−50
= 200.
The initial conditions are set to:
x
0
1
= 0.1, ˙x
0
1
= 0, x
0
2
= 0, ˙x
0
2
= 0. (34)
The constant macro-step size is varied for evalua-
tion purposes within the interval ∆T ∈ [10
−5
, 8·10
−3
];
the fixed micro-step size is set to δT = 10
−5
. The ref-
erence solution y
re f
is determined individually by uti-
lizing a monolithic simulation with ∆T = δT . There-
fore, the monolithic overall system is derived from the
subsystem description (30)-(33) assuming ideal cou-
plings u
1
= y
2
and u
2
= y
1
:
˙
x
x
x
1
˙
x
x
x
2
=
A
1
+ B
1
· D
2
·C
1
B
1
·C
2
B
2
·C
1
A
2
·
x
x
x
1
x
x
x
2
.
The numerical reference solution is determined by us-
ing the explicit Euler method.
3.2 Performance Evaluation
For comparison purposes the following Figures 3 to 7
illustrate the force coupling variable y
2
(t) exchanged
between the two subsystems.
In a first aspect the impact of utilizing piecewise lin-
ear (Fig. 3) or piecewise constant basis functions (Fig.
4) for the extrapolated inputs is examined. By com-
paring both figures piecewise constant basis functions
leads to increased co-simulation discretization errors.
The significant discontinuous steps in the force signal
at coupling time instances are caused by the steps in
the input signal and the existing direct feedthrough
(D
2
6= 0) in Subsystem 2. A second reason of us-
ing piecewise linear basis functions is motivated by
the generalization of the pre-step stabilization method
where the time derivative of the input ˙u appears, e.g.
see (4) and (13). As the usage of piecewise constant
basis functions ( ˙u = 0) will eliminate the generalized
terms piecewise linear basis functions have been used
for the following computations.
With respect to the classical NEPCE method, in con-
trast to piecewise linear functions (Fig. 5 ), piecewise
constant functions (Fig. 6) indicate improved stabil-
ity. In case of classical NEPCE applications piece-
wise constant functions are utilized for comparison.
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
228

Figure 3: ∆T = 0.002; output y
2
by FOH input extrapola-
tion.
Figure 4: ∆T = 0.002; output y
2
by ZOH input extrapola-
tion.
In Figure 5 y
2
is illustrated for a macro step-size of
∆T = 0.00305, which indicates the stability border
of the FOH coupling approach. Figure 6 illustrates
results for ∆T = 0.0037 and indicates the stability
border of the NEPCE coupling (Benedikt and Hofer,
2013). The stability limit of the linearly-implicit sta-
bilization (Arnold, 2011) is experimentally deterem-
ined at a macro-step-size of ∆T = 0.008, see Fig. 7.
By considering all cases, Fig. 5 to 7, the herein pre-
sented pre-step stabilization method outperforms state
of the art algorithms, also in the case of eventually ex-
isting direct feedthroughs in subsystems.
For pointing out the significantly improved stability
behavior of the proposed pre-step stabilization algo-
rithm in detail, a logarithmic error plot, depending on
the macro step-size ∆T is depicted in Figure 8. For
defining a meaningful error measure, the following
relative error is introduced:
err :=
∑
i
1
norm
i
· max
t∈[t
start
,t
end
]
|y
re f
i
(t) −y
i
(t)|
,
(35)
with
norm
i
:= max
t∈[t
start
,t
end
]
[y
re f
i
(t)] − min
t∈[t
start
,t
end
]
[y
re f
i
(t)].
As the different outputs may vary in their magnitudes
the constant norm
i
, describing the ranges of the out-
puts y
i
, is introduced for normalization purposes in
Figure 5: Output y
2
; stability border ∆T = 0.00305 for FOH
coupling; NEPCE solution with FOH.
Figure 6: Output y
2
; stability border ∆T = 0.0037 for
NEPCE coupling (Benedikt and Hofer, 2013); NEPCE so-
lution with ZOH.
Figure 7: Output y
2
; stability border ∆T = 0.008 for linear
implicit stabilization coupling (Arnold, 2011).
(35). It is worthy to mention that in the computation
of the error depicted in Figure 8 all three different out-
puts (y
y
y
1
, y
2
) of the subsystems are considered. As one
is interested to analyze the stability of the different
coupling algorithms the simulation time is extended
to t
end
= 0.5 s, so instabilities which are growing over
the time are higher weighted. Figure 8 turns out fol-
lowing conclusions:
• an improved stability of the pre-stabilization ap-
proach using piecewise linear functions (FOH)
is pointed out within the interval of ∆T ∈
[10
−4
, 10
−2
] compared to classical FOH, NEPCE
and the linearly-implicit couplings.
Extension of the Model-based Pre-step Stabilization Method for Non-iterative Co-simulation - Including Direct-feedthrough
229
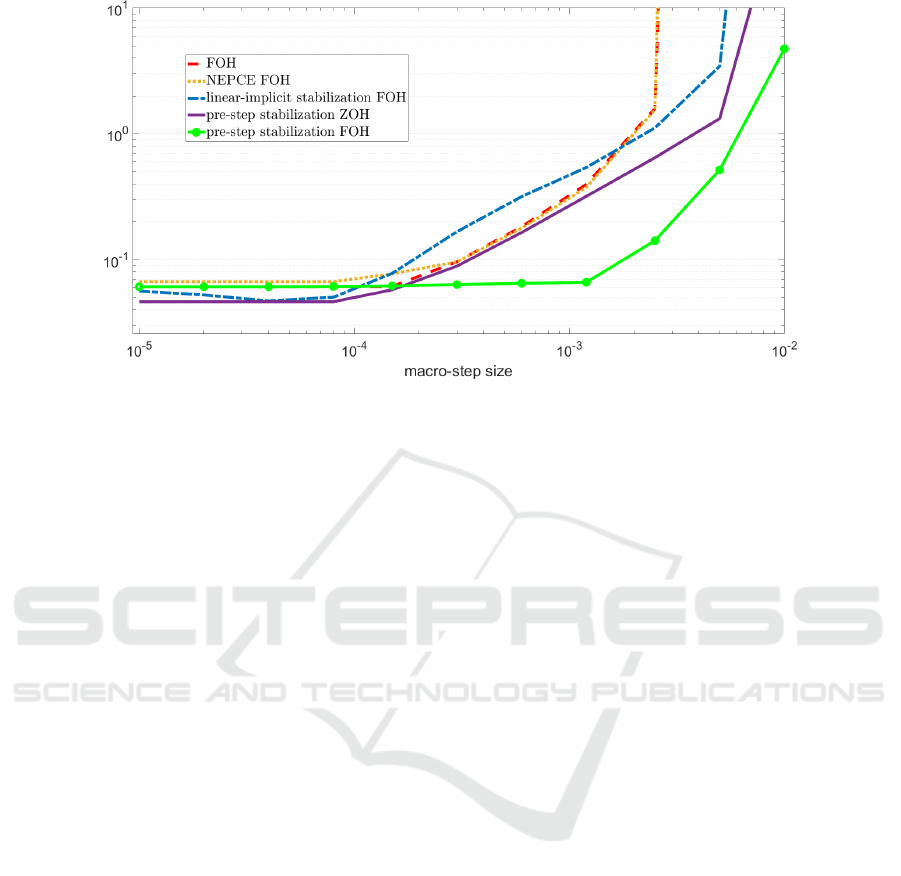
Figure 8: Logarithmic error plot.
• a significantly improved stability of the pre-
stabilization approach using piecewise linear
functions (FOH) is confirmed within the inter-
val of ∆T ∈ [10
−4
, 10
−2
], compared to the pre-
stabilization approach using piecewise constant
functions (ZOH).
• compared to FOH, NEPCE coupling and the
linearly-implicit stabilization the pre-step stabi-
lization approaches (ZOH and FOH) are stable for
macro-step sizes about 10
−2
, as depicted in Figure
7 for ∆T = 0.008.
• the analyzed coupling algorithms behave similar
within the interval of ∆T ∈ [10
−5
, 10
−4
] where the
error is dominated by the fixed micro-step size, cf.
error estimation in (Arnold, 2006).
• the difference between the pre-step stabilization
with ZOH and FOH within the interval of ∆T ∈
[10
−5
, 10
−4
] is noticeable; to be investigated in fu-
ture work.
4 CONCLUSIONS
Direct feedthroughs of subsystems degrade co-
simulation performance in general. This paper
presents an extension to a recently proposed pre-step
coupling algorithm for incorporation of optionally ex-
isting direct feedthroughs of subsystems. Due to the
extended system description the time derivative of
corresponding subsystem inputs appears, to be han-
dled additionally by the master algorithm. In contrast
to existing state of the art approaches, examination
of the algorithm along a typical used co-simulation
benchmark example turns out an outstanding perfor-
mance in terms of stability and accuracy. This signifi-
cant performance improvement is justified by the pre-
step compensation of the co-simulation discretization
error based on the approximated exact solution, i.e.
the inputs to subsystems are modified according sub-
system properties like stiffness and direct feedthrough
prior to the execution of the co-simulation time incre-
ment.
5 FUTURE WORK
The current version of the pre-step co-simulation al-
gorithm is able to cope with subsystem properties like
stiffness and direct feedthrough. An extension of the
algorithm is necessary for efficiently handling sub-
systems described by differential algebraic equation
(DAEs), where inputs affect subsystem-internal alge-
braic constraints and thus introduce so-called drift ef-
fects. Furthermore, this contribution focusses on sub-
systems with a relative degree of zero and one. Future
research has to investigate the importance of the rela-
tive degree in the context of co-simulation. Finally,
the proposed pre-step co-simulation algorithm will
be implemented prototypically into the co-simulation
platform Model.CONNECT
T M
from AVL to be ap-
plied to realistic industrial use-cases for an extended
performance evaluation.
REMARK PATENT
The presented work describes an extension to a novel
coupling approach for co-simulation of distributed
SIMULTECH 2018 - 8th International Conference on Simulation and Modeling Methodologies, Technologies and Applications
230

dynamical subsystems. Protected by a pending Euro-
pean patent (Benedikt and Genser, 2018) the outlined
schemes are supported by the co-simulation platform
Model.CONNECT
T M
(AVL, 2018) from AVL.
ACKNOWLEDGEMENTS
The publication was written at VIRTUAL VEHI-
CLE Research Center in Graz, Austria. The authors
would like to acknowledge the financial support of
the COMET K2 Competence Centers for Excellent
Technologies Programme of the Federal Ministry for
Transport, Innovation and Technology (bmvit), the
Federal Ministry for Digital, Business and Enterprise
(bmdw), the Austrian Research Promotion Agency
(FFG), the Province of Styria and the Styrian Busi-
ness Promotion Agency (SFG).
REFERENCES
Arnold, M. (2006). Multi-rate time integration for large
scale multibody system models. IUTAM Symposium
on Multiscale Problems in Multibody System Con-
tacts.
Arnold, M. (2011). Numerical stabilization of co-
simulation techniques, the ODE case. Martin
Luther University Halle-Wittenberg NWF II-Institute
of Mathematics.
AVL (2018). Model.connect
T M
, the neutral model inte-
gration and co-simulation platform connecting virtual
and real components. http://www.avl.com/-/model-
connect-. [Online; accessed 31.01.2018].
Bastian, J., Glau, C., Wolf, S., and Schneider, P. (2011).
Master for co-simulation using fmi. 8th Modelica
Conference, Dresden, Germany,.
Benedikt, M. and Genser, S. (2018). Pre-step co-simulation
method and device (filed).
Benedikt, M. and Hofer, A. (2013). Guidelines for the ap-
plication of a coupling method for non-iterative co-
simulation. IEEE, 8th Congress on Modelling and
Simulation (EUROSIM), Cardiff Wales.
Benedikt, M., Watzenig, D., and Hofer, A. (2013). Mod-
elling and analysis of the noniterative coupling pro-
cess for cosimulation. TaylorFrancis.
Blochwitz, T. e. a. (2012). Functional mockup interface 2.0:
The standard for tool independent exchange of simu-
lation models. 9th International Modelica Conference
Munich.
Busch, M. (2012). Zur Effizienten Kopplung von Simula-
tionsprogrammen. PhD thesis, University Kassel.
Cellier, F. and Kofman, E. (2010). Continuous System Sim-
ulation. Springer, New York, 1st edition.
Dorf, R. C. and Bishop, R. H. (2017). Modern Control Sys-
tems. Pearson, USA, 13th edition.
Genser, S. and Benedikt, M. (2018). Model-based pre-step
stabilization method for non-iterative co-simulation.
IMSD, Tecnico Lisboa.
Katayama, T. (2005). Subspace Methods for System Iden-
tification. Springer-Verlag London Limited, London,
1st edition.
Kuebler, R. and Schiehlen, W. (2000). Modular simulation
in multibody system dynamics. Kluwer Academic
Publishers.
Overschee, P. V. and Moor, B. D. (1996). Subspace Iden-
tification for Linear Systems. Kluwer Academic Pub-
lishers, London, 1st edition.
Sadjina, S., Kyllingstad, L., Skjong, S., and Peder-
sen, E. (2016). Energy conservation and power
bonds in co-simulations: non-iterative adaptive step
size control and error estimation. arXiv preprint
arXiv:1602.06434.
Sicklinger, S., V., B., and B., E. (2013). Interface-jacobian
based co-simulation. NAFEMS World Congress 2013.
Trnka, P. (2005). Subspace identification methods.
Viel, A. (2014). Implementing stabilized co-simulation of
strongly coupled systems using the functional mock-
up interface 2.0. 10th International Modelica Confer-
ence,Lund, Sweden.
Extension of the Model-based Pre-step Stabilization Method for Non-iterative Co-simulation - Including Direct-feedthrough
231
