
A Framework for Electronic Travel Aids
Florian von Zabiensky and Diethelm Bienhaus
Technische Hochschule Mittelhessen, University of Applied Sciences, Institute of Technology and Computer Science,
Wiesenstr. 14, Giessen, Germany
Keywords:
Electronic Travel Aid, Framework, Distributed System, Human Computer Interface, Simulation, Visual
Impaired.
Abstract:
Electronic Travel Aids (ETA) help visually impaired people to avoid obstacles. In the ETA area new user in-
terfaces and interaction modes are investigated. Due to increasing hardware and software complexity used in
modern ETA there is an increasing demand for simulation tool to facilitate development processes. Such tools
enable testing of larger varieties of user experiences in shorter time. In the field of acoustic virtual displays
capabilities of different sounds and psychoacoustic phenomena to display three-dimensional sound have to
be evaluated. Different simulators make it difficult to compare research results. To facilitate comparability
between different approaches an ETA framework is introduced in this work. The framework includes a sim-
ulator which allows research groups to perform experiments with their specific interfaces. Due to the same
underlying simulation environment results of various groups are comparable. Using a framework would make
algorithms or devices from different research groups be directly usable for others. In this position paper the
development of such a framework is reasoned and the basic requirements on such a framework are proposed.
1 INTRODUCTION
In the context of electronic travel aids (ETAs) for vi-
sual impaired many research projects exist and prod-
ucts are developed to support user orientation, finding
a target or recognizingan obstacle. Those projects use
sensors like a compass, an accelerometer or a gyro-
scope to gain environmental information for naviga-
tion purposes. Information is then presented by a de-
vice that serves an information channel different from
vision. Typically this is the haptic or acoustic chan-
nel.
In this position paper a framework is proposed to
support research and development of ETAs for vi-
sual impaired. In ETAs devices and software fulfill
two tasks (1) acquisition of environmental informa-
tion and (2) displaying them. For the display process
the chosen information channel has to be tailored pre-
cisely. It should not disturb the function of the chan-
nel e.g. perception of the environment via sound in
case of an acoustical display. On the other hand gath-
ered information should be displayed to a great ex-
tent. Preferably research on information acquisition
and displaying should be performed independently.
The approach introduced here aims on an decoupling
of these two tasks: The presentation subsystem can be
developed using our environment-simulation as part
of the framework decoupled from the data acquisition
systems. Such an environment-simulation is imple-
mented in current research projects by virtual envi-
ronments, where the user can walk by mouse or key-
board input. These simulation-games provide sensor
data gathered by virtual sensors in a virtual environ-
ment. Thus the tested presentation subsystem will
display the virtually measured data. No direct depen-
dency of the presentation subsystem to the sensor sub-
system exists, allowing parallelized research. For the
final integration-step the modular approach provided
by the framework helps replacing the simulation sub-
system by a real acquisition system. The modular ar-
chitecture facilitates overall system optimization by
selecting the best combination of a variety of differ-
ent subsystem-implementations.
Environmental simulation may also be used to
perform user studies. The simulator enables monitor-
ing of (1) movement and (2) collisions with obstacles
as quality metrics. Other advantages of simulations in
complete virtual environments are: (3) repeatable en-
vironmental influences and (4) avoidance of real user
interaction in dangerous situations. Serious disadvan-
tages are: (1) simulations cannot cover the full range
of possible situations and (2) simulating user behav-
ior may be close to reality, but will never be exactly
realistic. E.g. a head movement would optimize the
von Zabiensky F. and Bienhaus D.
A Framework for Electronic Travel Aids.
DOI: 10.5220/0006514701720177
In Proceedings of the International Conference on Computer-Human Interaction Research and Applications (CHIRA 2017), pages 172-177
ISBN: 978-989-758-267-7
Copyright
c
2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

perception of the position of a sound source placed in
a three dimensional space compared to a fixed head
(Wu et al., 1997). But in simulations with a keyboard
as an input device, head movements are not as intu-
itive as they are in the real world. Providing a sin-
gle open source simulation system for research groups
working in that area removes duplicated work, help-
ing development being focused on the key aspects of
a project. Also an accumulated effort of a commu-
nity driven project will lead to a far more advanced
simulation compared to the scope of work a single re-
search team can gain. An example of such a widely
used framework in the domain of mobile robotics is
the Robot Operating System (ROS)
1
. It combines a
communication middleware as well as simulation en-
vironment and many modules implementing common
algorithms as well as hardware drivers used in mo-
bile robotics. It is an open source project supported
by a wide community. Thus the decision to develop a
framework for ETAs is justified. Section 2 outlines a
few ETAs, the GIVE-ME framework and ROS. Sec-
tion 3 lists requirements for an ETA framework, fol-
lowed by a discussion of disadvantages and advan-
tages of such a framework.
2 RELATED WORK
Dakopouls and Bourbakis divided ETAs into three
categories based on their feedback interfaces. The
categories for classification are “Audio feedback” ,
“Tactile feedback” and “w/o interface”. (Dakopou-
los and Bourbakis, 2010) Given below three projects
are described and categorized. After that the GIVE-
ME framework and ROS are introduced as a basis for
the intended framework. The Tyflos project assists vi-
sual impaired in navigation tasks and the environment
recognition.
“In particular, the Tyflos prototype inte-
grates a wireless portable computer, cameras,
range and GPS sensors, microphones, natural
language processor, text-to-speech device, an
ear speaker, a speech synthesizer, a 2D vibra-
tion vest and a digital audio recorder.” (Bour-
bakis et al., 2008)
Tyflos is a multi-modal assistance system which inter-
acts via different input and output channels to gather
or present information from the user. A tactile device
to serve an output channel is the vibration vest. Like
setting a pixel on a two dimensional monitor the vest
vibrates on a two dimensional position. To gather in-
formation of the environment or get instructions from
1
http://www.ros.org/
the user the project uses a camera or a microphone.
This project is categorized as “Tactile feedback”.
Gomez Valencia developed a few systems to assist
visual impaired and described them in his PhD The-
sis. He developed a system to recognize street signs
and read them to the user. This assists the user in
case of self localization in a city. Additionally he de-
veloped an acoustic display to present different colors
by different instruments. He developed an obstacle
detection and a tactile input device, too. (Gomez Va-
lencia, 2014) Because of the acoustic display for in-
formation presentation this project is categorized as
“Audio feedback”.
The sound of vision project
2
did much research on
three dimensional sound for acoustic displays. There-
for they developed glasses as a device to capture the
environmental and present information to the user via
sound. To provide their results to a community they
plan a reusable sonification library and a reusable
training serious game as part of their “additional out-
puts”. This project comes close to the intended open
community. But it only provides the results with a
library but not a whole framework with the possibil-
ity to exchange a device to test algorithms with other
hardware. This project is also classified as “Audio
feedback” even if it has a few elements of “Tactile
feedback” by providing a haptic west.
Khoo describes a real framework. The GIVE-
ME framework was developed under the key points
of maintaining a simulation environment for devices
with the intention to use gamification aspects in user
tests to make the tests more interesting. He describes
the framework with the simulator and the workflow of
keeping this framework alive. (Khoo, 2016) But the
last changes to his website were in March of 2016.
ROS is a frameworkfor distributed systems driven
by a large and vital community. The active com-
munity is a big benefit in contrast to the GIVE-ME
framework. ROS provides the ability for modules to
communicate or interact in different ways. E.g. a
module encapsulates an algorithm or a device driver.
The modules could be distributed over a network.
ROS also implements different tools to analyze live
data or replay recorded data. A mass of modules
for typical problems in mobile robotics such as self
localization or navigation are implemented and pro-
vided by ROS. ROS will be used as the basis for
the intended framework because of its scope and the
similarities between problems in mobile robotics and
ETAs for visual impaired.
2
http://www.soundofvision.net/

3 REQUIREMENTS
ETAs are mobile systems a user have to rely on.
Therefor there are several requirements which have
to be fulfilled. The requirements presented in this sec-
tion are derived from Dakopoulos’s und Bourbakis’s
work in which they compared several ETAs devel-
oped in research projects (Dakopoulos and Bourbakis,
2010). This comparison is based on a list of features
described in table 1.
Fast Data Communication. Communication be-
tween different devices like a haptic belt, an
acoustic display, a 3D camera, etc. is time critical
hence the framework has to supply a fast infras-
tructure. A slow communication would result in
a delayed perception of the environment which
could result in a collision or other dangerous
scenarios.
Reliable Data Communication. Message exchange
between modules has to be reliable. A message
has to reach the destination without fail and must
be accepted only once if an repeated message oc-
curs. If the modules would communicate in an
unreliable way the detection of an object possibly
would not be reported to the user or it could be
repeated at a time where the object is out of the
way.
Platform Independence of the Framework. The
platform a device is running on has to be transpar-
ent for the framework. T It could be reasonable to
deploy one part of the system to a Linux platform
and another part to e.g. an Android platform.
Close-to-Hardware Programming Abilities.
ETAs can use user interfaces that have to be
programmed directly (setting an output pin to
start a vibration engine). But it could be an
advantage to program the system with higher
languages in case of rapid prototyping. Therefore
a framework should be programmable on a higher
level of abstraction (Python) and on a low level of
abstraction, too.
Distributed Nodes for Different Tasks. The frame-
work should follow a distributed system architec-
ture for ETAs. This way the control of acoustic
or haptic interfaces and their drivers can all be
implemented as distributed modules which com-
municate with each other. An explicit description
of module interfaces allows their exchange. The
interface consists of data and services provided
by a module. In case a navigation functionality
should be implemented one can use a module for
self localization and another for path planning and
additional modules for engine drivers. The com-
munication of modules should not be limited to
one platform therefor a network communication
should be provided.
Physical Layer Independent Communication.
Especially in the context of a distributed system
the communication should be independent of the
used communication medium (WiFi, Bluetooth,
CAN, ... ).
Open Source. The framework should be open
source. This way the development could be
driven by a community.
Security. If the system would implement a face
recognition based on a phone book then private
data would be communicated. To ensure privacy
of such data secure communication is essential.
Data manipulation must be prevented. So security
means also authenticity and integrity.
4 DISADVANTAGES OF AN OPEN
FRAMEWORK
On ETAs resources are constrained due to mobility
and small size. If a framework is used to develop
ETAs developers may lose the focus to optimize the
code for a constrained device. The complexity of
a framework can be much higher than needed for a
task. A device which is developed without a frame-
work could reduce the power consumption to provide
a higher battery life. There are also risks in the ad-
vantage of a community. If there will be no commu-
nity formed, there is no advantage in this point. The
acceptance of manufacturers would also improve the
framework but is not necessarily predictable.
5 ADVANTAGES OF AN OPEN
FRAMEWORK
The implementation of an open and distributed frame-
work for the development of ETAs offers opportuni-
ties if the risks of a community and the acceptance of
manufacturers eventuates.
Contribute and Exchange Basic Code
In the sound of vision project an audio game for sound
localization was developed. With this game different
auditive representations on navigational hints were
tested and a suggestion to reduce front / back confu-
sion in sound localization was proposed (B˘alan et al.,

Table 1: Structural and operational features. The upper half for the user’s needs, the lower half for the developer’s and
engineer’s needs. (Dakopoulos and Bourbakis, 2010).
Feature Description
Realtime The system operates fast enough such that information exchange with the user
is useful e.g. if an obstacle detection system needs 10 seconds to detect an
obstacle that is 6 feet in front of the walking-user,then the device is not working
in appropriate ”real” time.
Wearable The device is worn on the user’s body or as a piece of his clothing. Wearable
devices are useful for applications that require computational support while the
user’s hands, voice, eyes, ears or attention are actively engaged with the phys-
ical environment. The interaction between the user and the device is constant.
Another feature is the ability of multi-tasking: users can continue their current
tasks while using the device; it has to be integrable into all other actions.
Portable The device has to be lightweight and small in size with an ergonomic shape so
that the user can carry it without effort for long distances and time.
Reliable The system functions correctly in routine but also in different hostile or/and
unexpected circumstances.
Low-Cost The device is (or it will be, when it comes to the mass production) affordable
for most users.
Friendly The device is easy to learn, easy to use and encourages the user to regard the
system as a positive help in getting the job done.
Functionalities The number and importance of the system’s functionalities.
Simple The complexity of both hardware and software is small. The hardware parts are
few and simple to use (from the user’s point of view) and simple to build (from
the designer’s aspect)
Robustness The device is well constructed so it withstands difficult environmental condi-
tions or hard use. Its functionality varies minimally despite of disturbing factor
influences. It can still function in the presence of partial failures.
Wireless connectivity The device is connected wireless to a computer (server/database) in order
to continuously exchange information. Additionally, part of the processing
needed for its operation can be done on the remote computer.
Performance Overall performance
Originality The idea and the methodology are original promoting scientific and technolog-
ical knowledge.
Availability The system is implemented. A device that is ready to use and real-time exper-
iments can be performed e.g. a system that is only in the software stage is not
available.
Future Future improvements or enhancements
2015b). This way they developed a simulation to find
the best auditive representation to use them in their
device. A similar concept of a virtual labyrinth was
introduced in the RaVis3d
3
project which began re-
cently. If a realistic simulation environment would
exist and other projects would propose their results
and implementations with the same simulation envi-
ronment, research projects could complement each
other in a more effective way. This can be enabled
by a common framework and a platform to exchange
results and implementations.
3
http://ravis-3d.de/
Modular Architecture and Uniform
Messages
In a framework based on ROS the architecture of
ETAs would be modular. If the development is re-
alized in a strictly modular way the advantage of ex-
changing modules with the same interface would be
given. Even the maintainability would profit of this
architecture. The interoperability between different
devices would also profit by uniform message and ser-
vice interfaces.

Multimodal User Interfaces
The amount of information delivered by an device to
a user’s senses is restricted. E.g. an auditive display
could display many information. But at some point
the user would be distracted by the auditive infor-
mation and natural signals like environmental sounds
(cars, bells, ...) would be discarded. Thus there have
to be more than one interface if the amount of data is
to big. In parallel a tactile interface could be used to
arrange the information between these devices. An-
other use case of using different devices is user train-
ing with feedback. This way B˘alan et. al. trained
users to optimize three dimensional audio localization
with haptic feedback. (B˘alan et al., 2015a) A frame-
work enables changing and bind interfaces if the mes-
sage and service interfaces are defined for different
interface types.
Exchange User Interfaces
In every project it is possible to reach a point where
a change of direction would be appropriate. In the
sound of vision project they changed their presenta-
tion device from a stereo headphone to a self made
headphone.
“The conclusions from the spatial audio
tests led us away from HRTF-based solutions
towards the idea of the custom multi-speaker
headphones.” (Bujacz et al., 2016)
Such an change would be much simpler if inter-
faces are standardized. This way device drivers in op-
erating systems are implemented for different classes
of devices e.g. sound cards. With the same concept
the interface of a device driver could be implemented
for a 3D audio device by defining standard messages
and services. This way a 3D audio device will be ex-
changeable. Appropriate presentation strategies (e.g.
which frequencies should be used to display a posi-
tion) are an important issue, too. As an example Coo
and Cha developed a strategy to reduce front / back
confusion to optimize sound localization (Koo and
Cha, 2008). Exchangeability of strategies are worth-
while as well. In case of an existing framework such
strategies could even be distributed between different
research groups if they implement the same interfaces
(messages and services). By this means a research
group that wants to develop strategies to present data
does not have to develop the device, and vice versa.
Every group could concentrate on their main topic.
Distributed Computation
Gomez Valencia realized different projects during his
PhD like an detection of letters, colors, objects and
their presentation (Gomez Valencia, 2014). One point
of his conclusion deals with the computational power.
Parallel execution of his applications was restricted by
the used platform. If the software would be based on
a ROS like framework applications can be deployed
on different hardware nodes and run in parallel.
Augmented Reality for Real Life Test
Environments
The intended framework will implement a simulation
environment. In this environment the usage of aug-
mented reality is intended. This will allow a realistic
movement of users in a simulation environment. An-
other benefit will be the usage of markers. When a
marker is recognized its position, orientation and ID
can be determined. E.g. a wall, a door or another ob-
stacle could be detected. Markers can be placed in the
real world to place virtual objects represented e.g. by
a tone in the three dimensional space. By simulating
this known environment a device could be tested in
a realistic environment with realistic movements. By
recording of camera data tests can be evaluated after-
wards to improve results.
6 FUTURE WORK AND
CONCLUSIONS
In this position paper a framework for the develop-
ment of ETAs has been reasoned. Both the devel-
opment and the research on ETAs profit by such a
framework with improvements in user tests and ex-
change of results. The first step in the development
process of such a framework is to evaluate whether
ROS matches all requirements mentioned above. If so
several sample applications and devices will be imple-
mented and integrated to show the benefits of a frame-
work for ETAs. The intended architecture is shown in
Fig. 1 showing the main part of the framework as light
gray elements. The dark gray elements illustrate the
parts that should be developed and implemented by
the community such as human interface devices with
their related drivers and algorithms.
In the development of device drivers a uniform
interface of the devices is a big advantage. By
that means quality and maintainability of software in
ETAs will be enhanced. A strict modular approach
allows independent testing and deployment on inter-
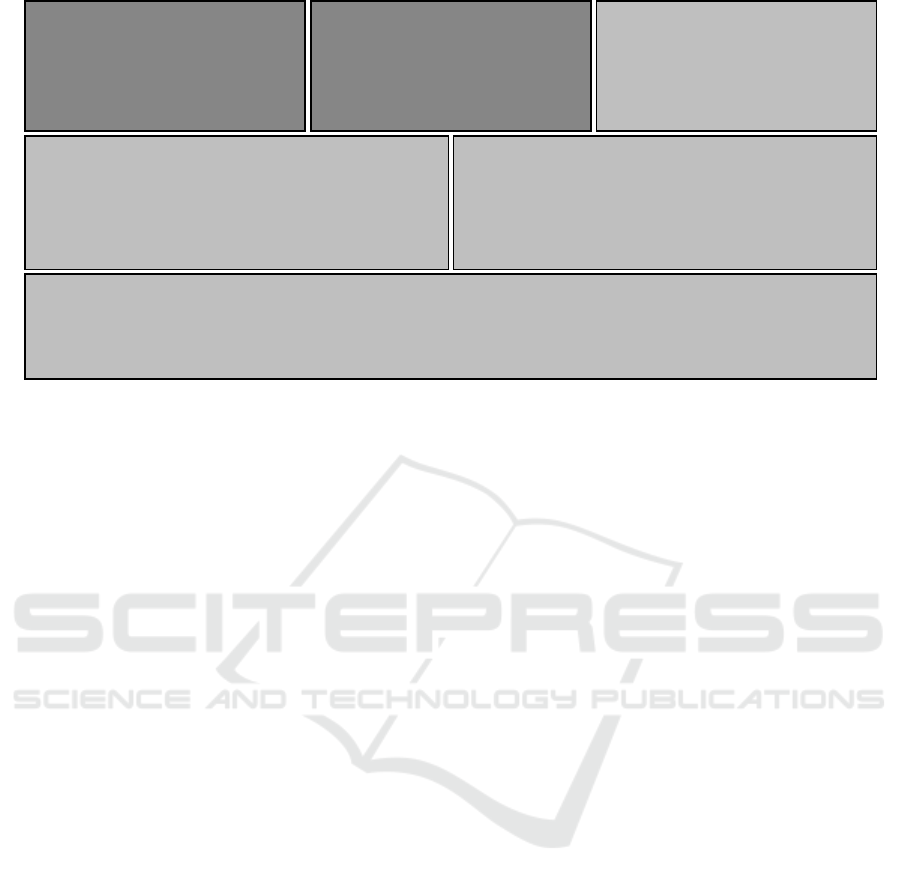
Message Definitions:
- Orientation Messages
- Obstacle Messages
- ...
Communication:
- Publisher / Subscriber
- Services
Build Environment:
- Tools
- Structure
- ...
Peripheral Devices:
- Vibration Belt
- 3D Audio Device
- Obstacle Detection Device
- ...
Algorithms:
- Obstacle Detection
- Navigation
- SLAM
- ...
Simulation:
- Virtual Environment
- Augmented Reality
- Simulation of sensor data
- ...
Figure 1: Overview of the intended framework. The light gray areas describe the framework itself with simulation, message
formats, communication and build environment. The dark gray areas describe the community driven parts of the framework
such as human interface devices as peripherals and algorithms.
connected distributed nodes. Communication mod-
ules and basic devices with its drivers will be imple-
mented within the framework. So developmentefforts
would be reduced by using existing modules for dif-
ferent tasks. During user tests of human interaction
devices the main point of research projects should be
the development of such a device and the method to
present the data. This achieves optimal results in the
task of interacting with the user. Usually research
projects are restricted in time. If the development
of a simulation environment or the communication
between modules were part of an project, this task
would consume time and costs. In providing such an
environmentas part of a framework this time could be
saved and spent more goal-oriented. Additionally the
results of different research groups are more compa-
rable by using the same simulation environment. We
think ROS is a good basis for such a framework for
ETAs because of the similarity of requirements and
constraints in mobile robotics and ETAs for visual
impaired. ROS provides already many modules for
problems in the areas of navigation, communication,
self localization and image or sensor data process-
ing. Evaluating the applicability of ROS for ETAs is
worthwhile.
REFERENCES
B˘alan, O., Moldoveanu, A., and Moldoveanu, F. (2015a).
3d Audio and Haptic Interfaces for Training the Spa-
tial Acoustic Resolution in Virtual Auditory Environ-
ments. In Student Think Tank at the 21st International
Conference on Auditory Display, page 3.
B˘alan, O., Moldoveanu, A., Moldoveanu, F., and Butean,
A. (2015b). Developing a navigational 3d audio game
with hierarchical levels of difficulty for the visually
impaired players. In RoCHI, pages 49–54.
Bourbakis, N., Keefer, R., Dakopoulos, D., and Esposito, A.
(2008). A Multimodal Interaction Scheme between a
Blind User and the Tyflos Assistive Prototype. pages
487–494. IEEE.
Bujacz, M., Kropidlowski, K., Ivanica, G., Moldoveanu, A.,
Saitis, C., Csapo, A., Wersenyi, G., Spagnol, S., Jo-
hannesson, O. I., Unnthorsson, R., and others (2016).
Sound of Vision-Spatial audio output and sonification
approaches. In International Conference on Comput-
ers Helping People with Special Needs, pages 202–
209. Springer.
Dakopoulos, D. and Bourbakis, N. (2010). Wearable Ob-
stacle Avoidance Electronic Travel Aids for Blind:
A Survey. IEEE Transactions on Systems, Man,
and Cybernetics, Part C (Applications and Reviews),
40(1):25–35.
Gomez Valencia, J. D. (2014). A computer-vision based
sensory substitution device for the visually impaired
(See ColOr). PhD thesis, University of Geneva.
Khoo, W. L. (2016). GIVE-ME: Gamification In Virtual En-
vironments for Multimodal Evaluation-A Framework.
PhD thesis, City University of New York.
Koo, K. and Cha, H. (2008). Enhancement of a 3d Sound
Using Psychoacoustics. World Academy of Science,
Engineering and Technology, International Journal of
Electrical, Computer, Energetic, Electronic and Com-
munication Engineering, 2(1):8–12.
Wu, J.-R., Duh, C.-D., Ouhyoung, M., and Wu, J.-T. (1997).
Head motion and latency compensation on localiza-
tion of 3d sound in virtual reality. In Proceedings of
the ACM symposium on Virtual reality software and
technology, pages 15–20. ACM.
