
Suggestion of Motion Velocity/Acceleration Curved Surface
Kaoru Mitsuhashi
1
, Mizuho Nakamura
1
, Masanobu Chiba
1
and Hiroshi Hashimoto
2
1
Mechanical Maintenace and Safety Engineering Unit, Polytechnic University of Japan, Kodaira, Tokyo, Japan
2
Master Program of Innovation for Design and Engineering, Advanced Institute of Industrial Technology, Tokyo, Japan
Keywords: Skill Level, Microsoft Kinect, Motion Curved Surface, Velocity/Acceleration Visualization, RGB Color
Gradation, Experts and Beginners.
Abstract: The skill teaching/succession method is not quantitative but qualitative, which is abstract oral or gesture
expression. Quantitative teaching is difficult for teacher/instructor. In previous research, Expert and
beginner perform the sports and entertainment motion, and the character of the motion curved surface is
analysed using Microsoft Kinect (RGBD camera). The character is the maximum curvature and surface
area. However, the usage of characters is uncertain. In this research, we investigate the correlation of
maximum curvature and surface area from motion curved surface in before and after training. Therefore, we
visualize the different correlation of experts and beginners from the characters and the transition of the skill
training.
1 INTRODUCTION
Motion training of sports, art, and engineering is
difficult quantitatively, because it is almost trial-and-
error. Adjustment of force (pressure) or velocity for
motion skill is necessary, but the method of teaching
for skill is almost oral (onomatopoeia or metaphor)
or watching the movie, they are qualitative (Fujino,
Inoue, Kikkawa, etc., 2005). For example, the
qualitative teaching of force (pressure) adjustment
and muscle tone for motion seems to be effective,
because the nuance of complicated motion is able to
be expressed easily and is impressed strongly.
However, the qualitative expression method
(teaching) is vague, and the instructor can’t make the
learner (beginner) to copy the expert motion
perfectly (Taki, Hasegawa, Fukumura, 1996). Then,
the quantitative teaching is also necessary. The
adjusting velocity/force or muscle tone is measured
or analyzed using acceleration sensor or myogenic
potential sensor, but the measurement using the
sensor can only analyze the local motion. The
showing local motion analysis is difficult to
understand the expert motion intuitively or visually.
On the other hand, only using image processing
seems to be difficult to measure or analyze.
In previous research, we suggest the “Motion
Curve Surface”, it is expressed by human joint
positions and times using Microsoft Kinect. We
evaluate the user motion by its curvature. Firstly, we
visualize a physical motion (human joint trajectory)
using the motion curved surface, and extract the
difference between beginners and experts
(Mitsuhashi, Ohyama, and Hashimoto, 2014),
(Suneya, Kutsuna, and Mitsuhashi, etc., 2014).
Therefore, we can evaluate technical skill
quantitatively, and suggest the skill teaching method
for expert instructors. Secondly, we compose the
motion curved surfaces made from the multiple
Kinect view, so as to track the whole joint motion in
more detail, and confirm the validity of skill
succession by watching skeleton motion movie and
curved surface (Mitsuhashi, Ohyama, and
Hashimoto, 2015). Thirdly, we investigate the
correlation of character from the many motion
curved surfaces. The character of motion curved
surface is maximum curvature and surface area. By
means of expressing the diagram of the motion
curved surface character, the different and tendency
of experts and beginners is extracted. After then, we
investigate the transition of training effectiveness for
beginners from correlation diagram (Mitsuhashi,
Ohyama, and Hashimoto, 2016). However, we can
only clarify the human motion trajectory, but are not
clarifying the timing, rhythm, and force (pressure).
They are necessary to achieve of expert motion. In
addition, expert instructors can teach the skill
motion easily, because they can teach skill important
Mitsuhashi, K., Nakamura, M., Chiba, M. and Hashimoto, H.
Suggestion of Motion Velocity/Acceleration Curved Surface.
DOI: 10.5220/0006477304890493
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 2, pages 489-493
ISBN: Not Available
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
489

point effectively.
In this paper, we suggest the motion velocity
curved surface and the motion acceleration curved
surface, and the validity is investigated. Firstly, we
explain the calculation (definition) of motion
velocity/acceleration curved surface. The calculation
method is used the differential geometry, and the
express is the RGB color gradation using OpenGL
library. After that, the surfaces are investigated using
some motion samples for the validity. The
differences of expert and beginner motion are
visualized using expert opinions, velocity,
acceleration, and timing from the surfaces.
2 CALCULATION OF MOTION
VELOCITY/ACCELERATION
CURVED SURFACE
The previous motion curved surface is expressed by
the joint trajectories using approximation fitting. The
trajectories are arranged by u-direction of joints and
v-direction of time, and they are captured and
calculated using Microsoft Kinect and Kinect SDK.
We analyze the shape, area, and curvature of motion
curved surface. However, the force adjustment,
timing, and rhythm can’t be expressed using only the
area, shape, and curvature of motion curved surface.
Then, the motion velocity/acceleration curved
surface is suggested using the differential geometry.
Kinect can store the joint positions, but also times.
Consequently, the velocity and acceleration can be
expressed using time derivative (the joint positions
are differentiated by time). When the joint position
P
u,v
and time t
u,v
is given, the velocity S
u,v
is
expressed by equation (1).
vuvu
vuvu
vu
tt
S
,,
1,,
,
PP
(1)
Here, S
u,v
is the absolute value because the
direction of S
u,v
is already known. The u-direction of
the joints is not differentiated because it is not
changed by time. The acceleration A
u,v
is expressed
by equation (2) like the velocity calculation.
vuvu
vuvu
vu
tt
SS
A
,,
1,,
,
(2)
Here, A
u,v
is a positive or negative value. In
addition, the each acceleration is changed by
integrating joint mass. After that, the
velocity/acceleration is visualized (expressed) on the
motion curved surface using the RGB color
gradation. The RGB color (r, g, b) of velocity S
u,v
is
expressed by equation (3).
2554cos(15.0
255,0,0
)255,,0
)(25.0,255,0
)(50.00,255,
)(75.00,,255
0,0,255
,,
minmax
min,
min
min
minmaxmin
minmaxmin
minmaxmin
max
SS
SS
temp
SS
SStemp
SSSStemp
SSSStemp
SSSStemp
SS
bgr
vu
(3)
Here, S
max
is the maximum velocity, S
min
is the
minimum velocity. The parameter r, g, b (0<=r, g,
b<=255) is color strength (red, green, blue). S
max
is
expressed by only red. S
min
is expressed by only
blue. The acceleration is expressed by the same
method. Therefore, the skill level of the adjustment
force, rhythm, and timing can be visualized. The
previous motion curved surface is expressed by the
velocity or acceleration in the next chapter
(Mitsuhashi, Ohyama, and Hashimoto, 2014) ,
(Mitsuhashi, Ohyama, and Hashimoto, 2015).
Our IDE (Integrated Development Environment)
is Visual Studio Express 2015 for Windows
Desktop. Written program is C++, program library is
OpenGL and Kinect SDK. Subject motion expressed
by skeleton animation from Figure 1, and the motion
curved surface (curvature, velocity, acceleration) is
expressed at the same time. The joints are blue ball,
skeleton (bone) is gray bar. The method of
converting joint points into the curved surface is
approximation fitting.
3 EVALUATION OF MOTION
VELOCITY/ACCELERATION
CURVED SURFACE
The sports motion is expressed by the motion
velocity/acceleration curved surface using the
calculation method of the previous chapter, because
the validity of the surface is investigated. The
motion is throwing in darts, crawl in swimming, and
defense in karate.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
490
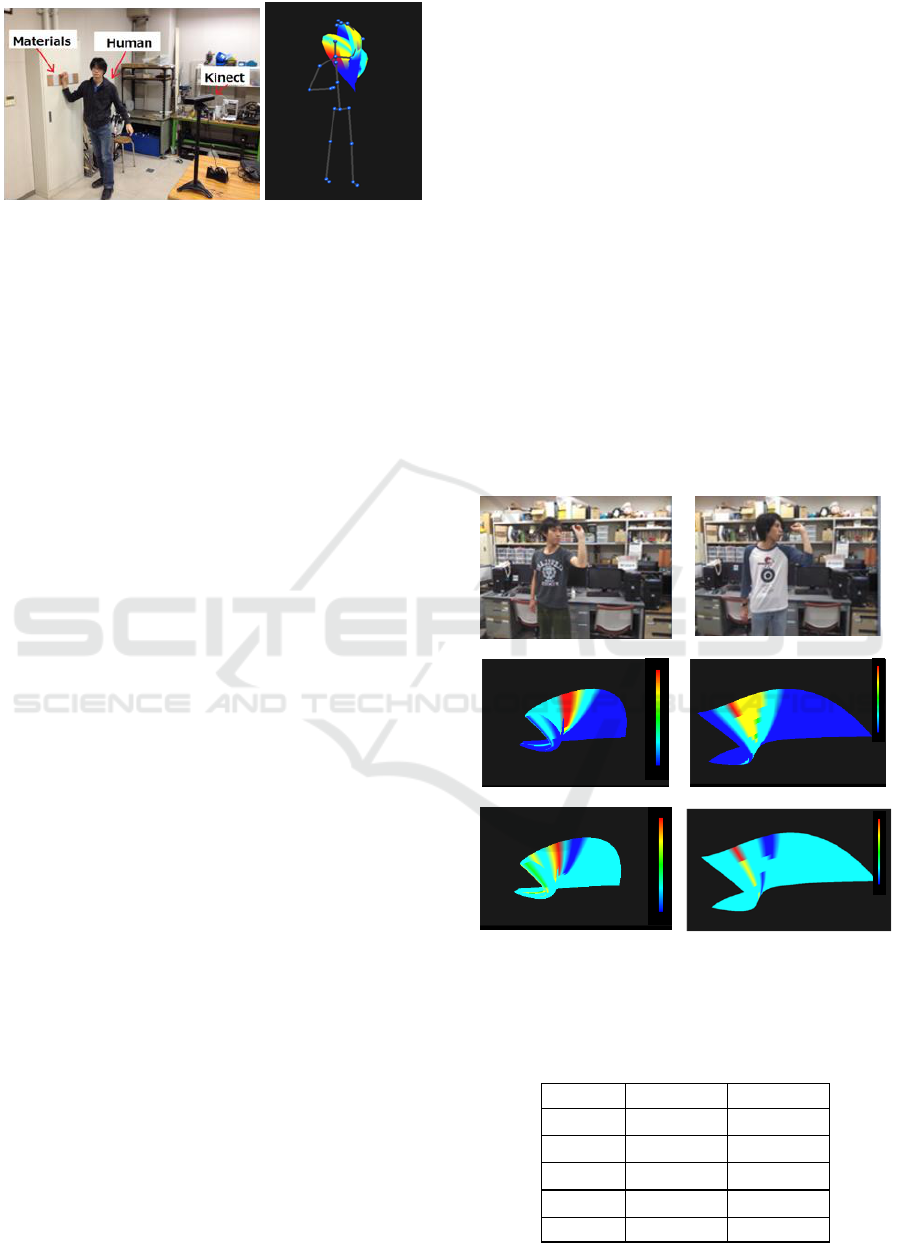
(a) Tracking state
(b) Skeleton animation
Figure 1: Motion tracking state.
3.1 Throw Darts Motion
Figure 2 shows the motion velocity/acceleration
curved surface of expert and beginner in darts throw
motion. They are formed by the joint trajectories of
right hand, right elbow, and right shoulder. In
addition, the gradation color bar is the range of
velocity of acceleration, and added in Figure 2 sides.
Table 1 shows the maximum velocity, the minimum
velocity, the maximum acceleration, the minimum
acceleration, and timing of maximum velocity (or
acceleration) in darts throw motion. The expert has
the fastest in darts release from Figure 2. On the
other hand, the beginner has the fastest in start
throwing; his velocity is constant in darts release.
Expert’s velocity is faster than the beginner’s
velocity from Table 1. Acceleration results are also.
In the expert’s opinion, he needs to let a snap for
wrist in darts release; he needs to concentrate in
wrist or hand. To verify these results, we analyze the
numerical results. Figure 3 shows the velocity and
acceleration of right hand, elbow, and shoulder.
Expert’s maximum velocity/acceleration is in release
darts and beginner’s is in throwing start from
Figure.4. Therefore, we can evaluate also from
velocity, acceleration, and timing.
3.2 Crawl Motion in Swimming
Figure 4 shows the motion velocity/acceleration
curved surface of expert and beginner in crawl
motion. They are formed by the joint trajectories of
right hand, right elbow, and right shoulder. Table 2
shows the maximum velocity, the minimum
velocity, the maximum acceleration, the minimum
acceleration, and timing of maximum velocity or
acceleration in crawl motion. From Figure 4, the
expert has the fastest in the downswing of right arm
(enter into a water), beginner has the fastest in
upswing of right arm (go out from a water). Expert’s
velocity is faster than the beginner’s velocity from
Table 2. Acceleration results are also. In the expert’s
opinion, he needs to push the water; he needs to
concentrate in enter to water.
3.3 Defend Motion in Karate
Figure 5 shows the motion velocity/acceleration
curved surface of expert and beginner in karate
defense motion. They are formed by the joint
trajectories of right hand, right elbow, and right
shoulder. Table 3 shows the maximum velocity, the
minimum velocity, the maximum acceleration, the
minimum acceleration, and timing of maximum
velocity or acceleration in defense motion. From
Figure 5, the expert has the fastest in the upswing of
both arms (defense start), beginner has the fastest in
the downswing of both arms (defense release).
Expert’s velocity is slower than the beginner’s
velocity from Table 3. In the expert’s opinion, the
arm trajectory is short, and he needs to concentrate
on stop arm (defend start); to accelerate the arm in
the upswing.
(a) Expert motion
(b) Beginner motion
(c) Velocity of expert
(d) Velocity of beginner
(e) Acceleration of expert
(f) Acceleration of beginner
Figure 2: Motion velocity/acceleration curved surface in
darts throw.
Table 1: Maximum/minimum velocity/acceleration, timing
in darts throw.
Expert Beginner
S
max
3.30 2.43
S
min
0.00 0.00
A
max
27.98 29.60
A
min
-19.13 -9.84
Position Release Start
Suggestion of Motion Velocity/Acceleration Curved Surface
491
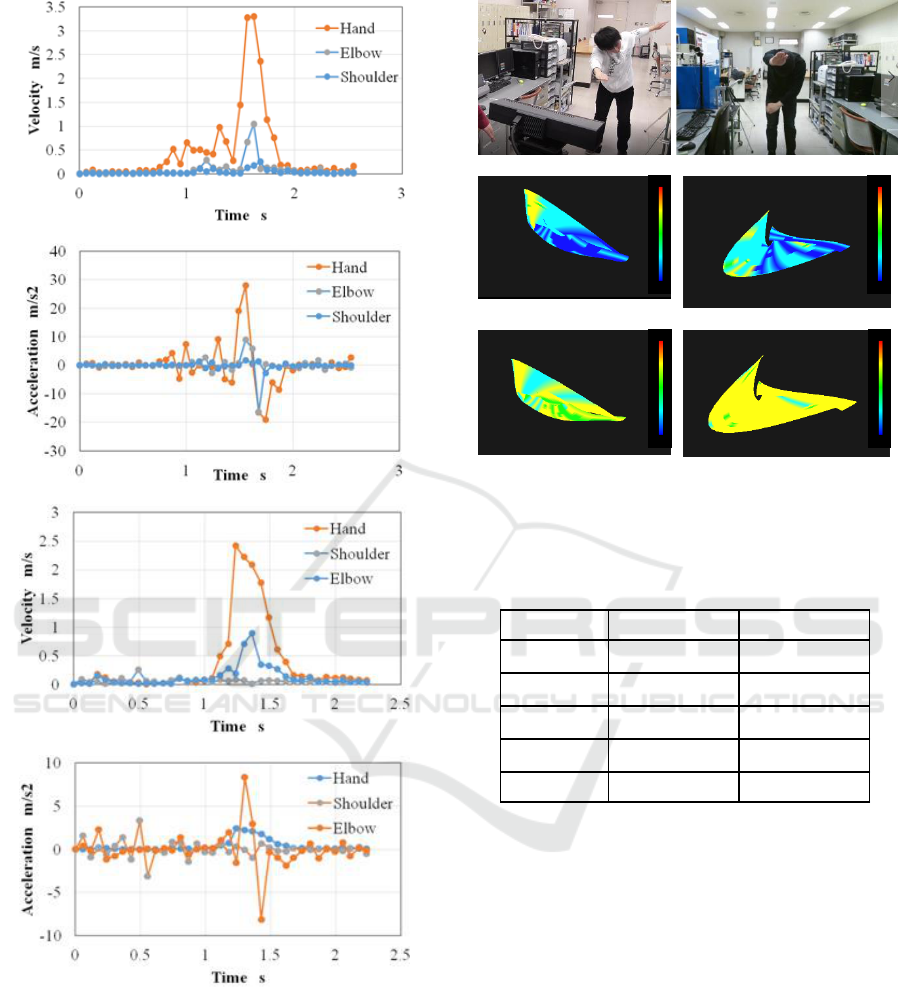
(a) Velocity of expert motion
(b) Acceleration of expert motion
(c) Velocity of beginner motion
(d) Acceleration of expert motion
Figure 3: Numerical analysis of velocity/acceleration.
4 CONCLUSION
We suggest the motion velocity curved surface and
the motion acceleration curved surface, and the
surfaces are investigated using 3 sports motion
samples for the validity. The motion velocity/
acceleration surface is expressed by time derivative,
(a) Expert motion
(b) Beginner motion
(c) Velocity of expert
(d) Velocity of beginner
(e) Acceleration of expert
(f) Acceleration of beginner
Figure 4: Motion velocity/acceleration curved surface in
swimming crawl.
Table 2: Maximum/minimum velocity/acceleration, timing
in swimming crawl.
the express method is the RGB color gradation.
After that, the differences of expert and beginner
motion are visualized using velocity/ acceleration
from the surfaces. In this result, the difference is the
maximum velocity timing, and maximum
velocity/acceleration value. So, we can evaluate the
difference from velocity, acceleration, and timing. In
future work, we adopt the other motion samples
using the surface, and suggest the motion force
curved surface.
ACKNOWLEDGEMENTS
This work was supported by JSPS Grant-in-Aid for
Young Scientists (B) Grant Number JP16K16328.
Expert Beginner
S
max
6.02 5.73
S
min
0.00 0.00
A
max
64.96 47.85
A
min
-68.40 -85.52
Position Downswing Upswing
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
492
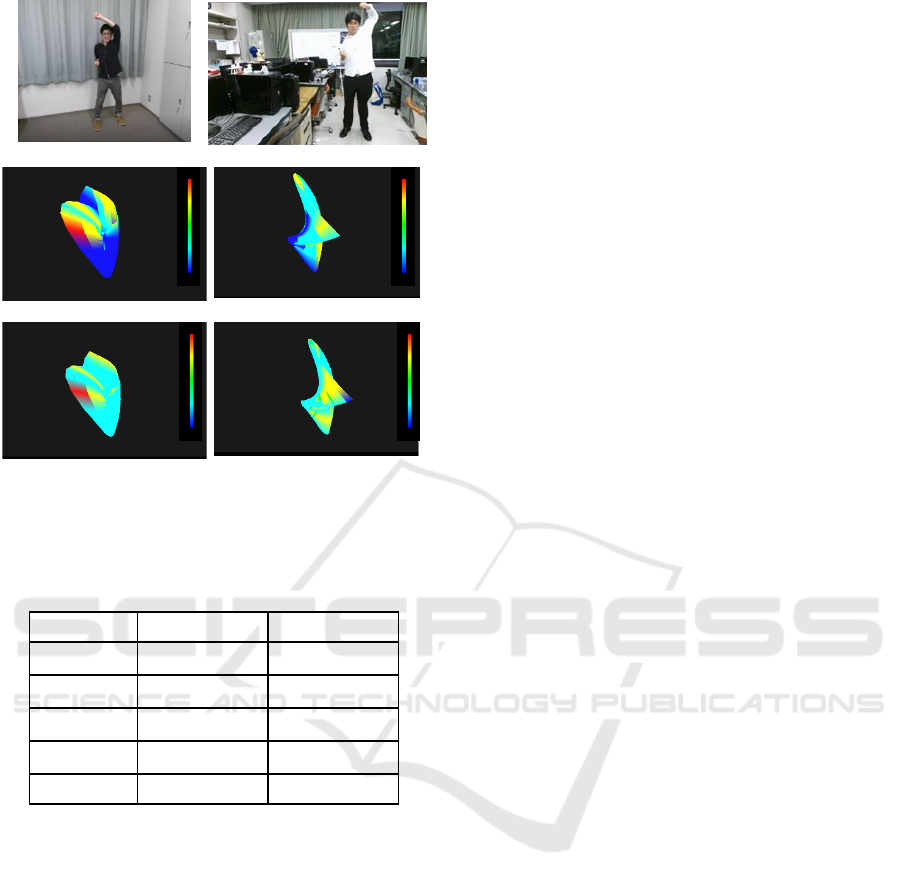
(a) Expert motion
(b) Beginner motion
(c) Velocity of expert
(d) Velocity of beginner
(e) Acceleration of expert
(f) Acceleration of beginner
Figure 5: Motion velocity/acceleration curved surface in
karate defence.
Table 3: Maximum/minimum velocity/acceleration, timing
in karate defence.
REFERENCES
Yoshitaka Fujino, Kousei Inoue, Masao Kikkawa,
Emi Nishina, and Tsuneo Ymamada. Sport
Onomatopoeia Data Base for Motor Learning, Japan
Society for Educational Technology, Vol.29, pp.5-8,
2005, (in Japanese)
Taki, T., Hasegawa, J. I., & Fukumura, T. (1996,
September). Development of motion analysis system
for quantitative evaluation of teamwork in soccer
games. In Image Processing, 1996. Proceedings,
International Conference on Vol. 3, pp. 815-818.
IEEE.
Kaoru Mitsuhashi, Hiroshi Hashimoto, and Yasuhiro
Ohyama, 2014. The Curved Surface Visualization of
the Expert Behavior for Skill Transfer Using
Microsoft Kinect, 11th International Conference on
Informatics in Control, Automation and Robotics
(ICINCO 2014), September1-3, Wien, Austria, 2014,
pp.550-555
Mitsuki Suneya, Masaki Kutsuna, Kaoru Mitsuhashi,
Yasuhiro Ohyama, and Hiroshi Hashimoto, 2014. The
Curved Surface Visualization of Behaviors for Skill
Inheriting using RGBD camera. SICE System
Integration 2014 (SI2014), December 14-17, Tokyo,
Japan. Pp.67-71, (in Japanese)
Kaoru Mitsuhashi, Hiroshi Hashimoto, and Yasuhiro
Ohyama, 2015. Motion Curved Surface Analysis and
Composite for Skill Succession using RGBD Camera,
12th International Conference on Informatics in
Control, Automation and Robotics (ICINCO 2015),
July21-23, France, 2015, pp.406-413
Kaoru MITSUHASHI, Hiroshi HASHIMOTO and
Yasuhiro OHYAMA, “Skill Level Evaluation of
Motion Curved Surface Character”, 13th International
Conference on Informatics in Control, Automation and
Robotics (ICINCO 2016), July 29-31, Lisbon, Portugal,
2016, pp.499-504
Expert Beginner
S
max
1.42 4.02
S
min
0.00 0.00
A
max
4.12 22.06
A
min
-3.30 -24.45
Position Upswing Downswing
Suggestion of Motion Velocity/Acceleration Curved Surface
493
