
Real-Time Setup with PD and Backstepping Control for a
Pelican Quadrotor
Jos
´
e Alejandro Dena Ruiz and Nabil Aouf
Centre of Electronic Warfare, Defence Academy of the United Kingdom,
Cranfield University, Shrivenham, SN6 8LA, U.K.
Keywords:
PD Control, Backstepping Control, Kalman Filter, Optitrack, ROS.
Abstract:
In this paper, a real-time setup and an implementation of a Proportional Derivative (PD) controller for ori-
entation and comparison between PD and BackStepping (BS) controllers for linear positioning are presented
using a Pelican quadrotor from Ascending Technologies (AscTec). An onboard Inertial Measurement Unit
(IMU) was used for orientation control and Optitrack Vision Tracking System for linear positioning control.
A linear Kalman filter was implemented for linear velocity estimation. The software and hardware integration
was achieved with the help of the Robot Operating System (ROS). Simulations and experiments with this
drone platform are achieved in order to implement different controller algorithms and analyse them in order
to achieve better aircraft performance.
1 INTRODUCTION
The studies in quadrotor control designing have been
increasing rapidly in recent years. Linear controllers
design for quadrotors have been achieved in sev-
eral work, like the Linear Quadratic Regulator(LQR)
and a Proportional Integral Derivative (PID) (Khatoon
et al., 2014) (Reyes-Valeria et al., 2013). Nonlinear
control design has also been achieved with different
techniques, like Backstepping (Das et al., 2009), Slid-
ing Mode (Runcharoon and Srichatrapimuk, 2013)
and Feedback Linearisation (Saif, 2009). (Castillo
et al., 2005) compared the performance of a nonlin-
ear control algorithm with a LQR control law. Results
show the unstable response of a linear controller ap-
plied to a nonlinear system, while the nonlinear con-
troller shows stable response. (Gomes et al., 2016)
used an AR.Drone quadrotor and a Vicon motion cap-
ture system to track a moving target with a Propor-
tional Derivative (PD) controller for linear position-
ing. (Mashood et al., 2016) showed experimental re-
sults of two AR.Drone following a squared path us-
ing VICON system and MATLAB/SIMULINK for
feedback and control implementation. This was
possible with AR Drone Simulink Development Kit
(ARDSDK). (Campbell et al., 2012) showed the de-
sign and implementation of a quadrotor aircraft au-
topilot, allowing the UAV to take off, transit from
one location to another and land at a desired loca-
tion. The position data is obtained from an Opti-
track system and a PID control technique was used
to achieve the desired response for (X,Y,φ, θ) and PD
controller for (Z,ψ), the integration of the motion
system and the controllers were developed on MAT-
LAB/SIMULINK.
An improved PID controller was implemented by
(Zheng et al., 2016) showing the comparison against
the traditional PID and Backstepping (BS). Simula-
tion and experimental results show stability and track-
ing performance, using a motion capture system and
MATLAB/SIMULINK as the feedback measurement
and the platform for control implementation respec-
tively.
(Corona-Sanchez and Rodriguez-Cortes, 2013)
presented outdoor and indoor experimental validation
of a nonlinear controller for a quadrotor vehicle. Also
showed a real-time programming strategy, parameter
identification technique and a nonlinear gain tuning
procedure.
A lot of related work has been done so far. Nev-
ertheless the novelty of this paper is to show the use
of our particular drone platform along with the Robot
Operating System (ROS) and the Optitrack system for
real time experimental scenarios. The result of these
powerful components is to obtain an stabilised drone,
in one hand running an orientation PD controller at
1000 Hz in the embedded processor and in the other
hand for position control, a linear PD or a nonlinear
676
Ruiz, J. and Aouf, N.
Real-Time Setup with PD and Backstepping Control for a Pelican Quadrotor.
DOI: 10.5220/0006474306760681
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 676-681
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

Backsepping controllers are presented to demonstrate
the efficiency of ROS and optitrack at 120 Hz. This
way the setup remains open for the development and
implementation of a new control techniques.
2 THE QUADROTOR DYNAMIC
MODEL
The model is derived based on some assumptions, in
order to simplify the dynamics of the complex sys-
tem to be suitable for simulation and control design,
Figure 1. A symmetric and rigid structure, rigid pro-
pellers and ground effect has been ignored. The full
Model derivation can be found on (Bouabdallah and
Siegwart, 2005).
Figure 1: Quadrotor AscTec Pelican and inertial frame on
Gazebo Simulator.
Using Newton’s laws of Mechanics and Euler’s Dy-
namics equation, the model consists of six equations
for the system dynamics and four equations describ-
ing the inputs of the system:
¨
X = (cos φ sinθcosψ + sin φsinψ)
1
m
U
1
(1)
¨
Y = (cos φ sinθsinψ − sinφcosψ)
1
m
U
1
(2)
¨
Z = (cos φcosθ)
1
m
U
1
− g (3)
¨
φ =
˙
θ
˙
ψ(
I
yy
− I
zz
I
xx
) −
J
r
I
xx
˙
θΩ +
U
2
I
xx
(4)
¨
θ =
˙
φ
˙
ψ(
I
zz
− I
xx
I
yy
) +
J
r
I
yy
˙
φΩ +
U
3
I
yy
(5)
¨
ψ =
˙
φ
˙
θ(
I
xx
− I
yy
I
zz
) +
U
4
I
zz
(6)
where equation 1, 2 and 3 describe the linear ac-
celeration of the vehicle in the direction of O
x
, O
y
and
O
z
axes using the North, East, Down (N, E, D) con-
vention respectively, while equations 4, 5 and 6 rep-
resent the angular accelerations of the vehicle about
the same axes respectively. l corresponds to the arm
length holding the propeller, φ, θ and ψ, represent the
Euler angles about the body axes B
x
, B
y
and B
z
re-
spectively. I
xx
, I
yy
and I
zz
, are the inertial components
about the x-axis, y-axis and z-axis respectively. ˙x, ˙y
and ˙z are the translational velocity components along
the main axes. U
i
≡ 1, 2, 3, 4 represents the system
inputs.
U
1
=
∑
T
i
= b(Ω
2
1
+ Ω
2
2
+ Ω
2
3
+ Ω
2
4
) (7)
U
2
= (−T
2
+ T
4
) = bl(−Ω
2
2
+ Ω
2
4
) (8)
U
3
= (T
1
− T
3
) = bl(Ω
2
1
− Ω
2
3
) (9)
U
4
= (−1)
i
∑
M
D
i
= d(−Ω
2
1
+ Ω
2
2
− Ω
2
3
+ Ω
2
4
)
(10)
Ω = Ω
2
+ Ω
4
− Ω
1
− Ω
3
(11)
where equation 7 represents the total thrust, 8 the
pitch moment, 9 the roll moment and 10 perform the
yaw moment. b is the thrust factor in hover and d
is the drag factor in hover. Increasing or decreasing
of the speed of the four propellers together will be
responsible for the altitude (z-axis) change in posi-
tion and velocity while varying the speed of one pair
of propellers (Ω
3
and Ω
1
) will cause the aircraft to
tilt about the y-axis which is denoted as pitch angle
θ. Similarly varying the speed of the propellers pair
(Ω
4
and Ω
2
) will cause the aircraft to tilt about x-axis
which is denoted as roll angle φ. Finally the vector
summation of the reaction moment produced by the
rotation of the pair (Ω
3
and Ω
1
) and the reaction mo-
ment produced by the rotation of the pair (Ω
4
and Ω
2
)
will cause the quadrotor to spin about its axis (z-axis),
which is denoted as yaw angle ψ.
3 QUADROTOR CONTROLLERS
In this section, a PD and Backstepping controller were
implemented for linear positioning, while only PD
controllers for orientation.
A set of PD controllers have been chosen for the
UAV attitude based on the good response in simula-
tions and experiments, fast response and less than five
percentage error in steady state. The Euler angles are
used as feedback signals to the proposed controller in
order to achieve the desired orientation. Traditional
implementation can be defined as:
U = K
p
e(t) +K
d
de
dt
(12)
Where K
p
is the proportional gain, K
d
the deriva-
tive gain, e(t) is the difference between the current
Real-Time Setup with PD and Backstepping Control for a Pelican Quadrotor
677

controlled value and the desired value. In our case,
three PD individual controllers are implemented:
U
2
= K
pφ
(d
φ
− φ) + K
dφ
(d
˙
φ
−
˙
φ) (13)
U
3
= K
pθ
(d
θ
− θ) + K
dθ
(d
˙
θ
−
˙
θ) (14)
U
4
= K
pψ
(d
ψ
− ψ) + K
dψ
(d
˙
ψ
−
˙
ψ) (15)
Where 13, 14 and 15 represent the torques for each
axis due to the rotor’s thrust, τ
φ
, τ
θ
and τ
ψ
respec-
tively. K
pφ
, K
pθ
and K
pψ
are the proportional gains
for each controller and K
dφ
, K
dθ
and K
dψ
the deriva-
tive ones. d
φ
, d
θ
and d
ψ
are the desired pitch, roll and
yaw, φ, θ and ψ correspond to the current attitude and
position values.
Considering that desired position d
x
, d
y
, d
z
are
known and x, y, z can be measured, the equations 1, 2
and 3 can be solved in order to determine the control
variables:
U
1
=
m
cosφcos θ
r
3
+ g (16)
d
φ
= arcsin(
m
U
1
(r
1
sinψ − r
2
cosψ)) (17)
d
θ
= arcsin(
m
U
1
(r
1
cosψ + r
2
sinψ)) (18)
Where 16 is the force to control the vertical dis-
placement z, 17 and 18 are the desired angles to posi-
tion the drone at the desired x and y on the cartesian
plane respectively. r
1
and r
2
represent the output con-
trol signal of the desired control technique that will
be mapped to the desired angles, g is the acceleration
due to the gravity force and m is the aircraft mass.
Equations 19-21 represent the PD controllers for
the linear position of the UAV.
r
1
= K
px
(d
x
− x) + K
dx
(d
˙x
− ˙x) (19)
r
2
= K
py
(d
y
− y) + K
dy
(d
˙y
− ˙y) (20)
r
3
= K
pz
(d
z
− z) + K
dz
(d
˙z
− ˙z) (21)
Using the Backstepping approach, one can synthe-
sise the control law forcing the system to follow the
desired trajectory. Writing the model equations for
linear position in space-state:
x
1
= x (22)
x
2
= ˙x
1
= ˙x (23)
x
3
= y (24)
x
4
= ˙x
3
= ˙y (25)
x
5
= z (26)
x
6
= ˙x
5
= ˙z (27)
First, we consider the tracking-error for x
1
posi-
tion:
z
1
= x
1d
− x
1
(28)
then, by considering the lyapunov function z
1
pos-
itive definite and it’s time derivative negative semi-
definite:
V (z
1
) =
1
2
z
2
1
(29)
˙
V (z
1
) = z
1
( ˙x
1d
− ˙x
2
) (30)
The stabilisation of z
1
can be obtained by intro-
ducing the virtual control input x
2
:
x
2
= ˙x
1d
+ α
1
z
1
(31)
with : α
1
> 0 (32)
∴
˙
V (z
1
) = −α
1
z
2
1
(33)
Now, we have to make x
2
= ˙x
1d
+ α
1
z
1
creating
the variable z
2
:
z
2
= x
2
− ˙x
1d
− α
1
z
1
(34)
For the second step, we consider the augmented
Lyapunov function:
V (z
1
, z
2
) =
1
2
(z
2
1
+ z
2
2
) (35)
(36)
and it’s time derivative is:
˙
V (z
1
z
2
) = z
2
r
1
− z
2
(
¨
X
1d
− α
1
(z
2
+ α
1
z
1
)) − z
1
z
2
− α
1
z
2
1
(37)
Extracting r
1
and making
¨
X
1
d = 0 is satisfied that
˙
V (z
1
z
2
) < 0, now adding the term α
2
z
2
with α
2
> 0 to
stabilise z
1
and we apply the same procedure for the y
and z axis:
r
1
= z
1
− α
1
(z
2
+ α
1
z
1
) − α
2
z
2
(38)
r
2
= z
3
− α
3
(z
4
+ α
3
z
3
) − α
4
z
4
(39)
r
3
= z
5
− α
5
(z
6
+ α
5
z
5
) − α
6
z
6
(40)
with:
z
3
= x
3d
− x
3
(41)
z
4
= x
4
− ˙x
3d
− α
3
z
3
(42)
z
5
= x
5d
− x
5
(43)
z
6
= x
6
− ˙x
5d
− α
5
z
5
(44)
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
678

4 THE PELICAN PLATFORM
The Pelican quadrotor from AscTec was chosen as the
prototype to develop the experiments, it’s physical ar-
chitecture made of carbon fibre and well distributed
sensors and components make it a reliable platform
for research purposes. This Quadrotor offers plenty
of space and various interfaces for individual compo-
nents and payloads. The total quadrotor weight in-
cluding sensors and battery is 1.63 Kg. Figure 2.
Figure 2: Quadrotor AscTec Pelican with Autopilot and
Mastermind.
The basic electronic components are the AscTec Au-
topilot, Motor controllers and a single board com-
puter, the Mastermind. The AscTec Autopilot also
known as Flight-Control-Unit (FCU) contains the
High Level Processor and the Low Level Processor
(HLP and LLP) running at 1 Khz which are in charge
of the aircraft control. The overall architecture is pre-
sented on Figure 3, the LLP handles sensor data pro-
cessing, data fusion as well as an stable attitude con-
trol algorithm. The HLP is open for user purposes, to
implement control algorithms, sensor fusion, etc.
Figure 3: Autopilot electronic architecture.
The AscTec Mastermind is an onboard processor
board, which can be carried by the AscTec Pelican,
it can be used like a ground PC, but it is mounted
on the flight system. In comparison to its weight and
size, it offers an extremely high processing power,
high data rates and a great variety of standard PC in-
terfaces to connect several kind of hardware devices.
Features like a Dual Core Atom, a Core 2 Duo, or a
Core i7, Firewire, WIFI and hardware serial ports are
supported.
5 THE QUADROTOR CONTROL
SYSTEM
The complete Quadrotor control system is presented
on figure 4. The full system is composed by the Pel-
ican from AscTec, which is the platform to control.
The PD orientation controllers obtained on equations
13, 14 and 15 were implemented in the HLP on Peli-
can, these controllers are using the angles provided by
the LLP as the feedback measurements. In the AscTec
Mastermind, a ROS application is interacting with the
HLP through the serial port, this application is send-
ing the new desired angles and receiving the current
states of the control variables and gives the user the
possibility of a real-time gain tuning. Figure 4 shows
the full control system overview.
Once the orientation controller is working, a sec-
ond ROS application is running parallel on the As-
cTec Mastermind, this application is performing the
linear position control algorithms for the Drone, al-
lowing the user to choose between the PD or BS con-
trollers obtained in section 3, create trajectories and
test new different control techniques. An Optitrack
Motion Capture System was used to retrieve the ac-
tual Drone position with a precision up to 2 mm. A
setup of 6 cameras connected to a 12-port POE switch
along with a host computer, Optitrack Motive appli-
cation runs and streams the current position of a rigid
body at 120 Hz to the AscTec Mastermind through a
wifi router. This second application also allows the
user to select between a PD or Backstepping con-
troller for linear position as well as real-time gain tun-
ing.
Figure 4: Quadrotor Control System overview.
6 EXPERIMENTAL RESULTS
The real experiments were done using the AscTec Pel-
ican as a UAV, for orientation control angles and an-
Real-Time Setup with PD and Backstepping Control for a Pelican Quadrotor
679
gular velocities were obtained from the onboard au-
topilot IMU, whereas to retrieve the X, Y and Z posi-
tion the optitrack system was used. A ROS package
was used to publish into ROS network the position of
the rigid body and the use of a linear Kalman filter for
velocity estimation. A two metres squared trajectory
was chosen as the drone trajectory and altitude of one
metre.
Velocity estimation was achieved using the linear
Kalman filter based on (Kim, 2010). Optitrack system
provides a high accuracy on ground truth at 120 Hz
(dt=0.0083), taking this parameters into account and
the time-varying for the process noise matrix Q, the
values of the matrices resulted as follow:
A =
1 0 0 dt 0 0
0 1 0 0 dt 0
0 0 1 0 0 dt
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 1
(45)
H =
1 0 0 0 0 0
0 1 0 0 0 0
0 0 1 0 0 0
(46)
R =
4X10
−6
0 0
0 4X10
−6
0
0 0 4X10
−6
(47)
Q =
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 0 0 0
0 0 0 dt
2
0 0
0 0 0 0 dt
2
0
0 0 0 0 0 dt
2
(48)
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
time in (ms)
0
0.2
0.4
0.6
0.8
1
1.2
Altitude in metres
Altitude PD controller
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
time in (ms)
-1
-0.5
0
0.5
1
Y position in metres
Y trajectory PD controller
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
time in (ms)
-2.5
-2
-1.5
-1
-0.5
0
0.5
X position in metres
X trajectory PD controller
Figure 5: Real XYZ displacement with a PD controllers.
Figures 5-7 show the results in real-time using the PD
controllers and Figures 8-10 show the results for the
BS controllers.
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
time in (ms)
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
YAW( ) angle in radians
YAW( ) PD controller
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
time in (ms)
-0.015
-0.01
-0.005
0
0.005
0.01
Nm
YAW Torque control
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
time in (ms)
-0.4
-0.2
0
0.2
0.4
ROLL( ) angle in radians
ROLL( ) PD controller
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
time in (ms)
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Nm
ROLL Torque control
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
time in (ms)
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
PITCH( ) angle in radians
PITCH( ) PD controller
0 500 1000 1500 2000 2500 3000 3500 4000 4500 5000
time in (ms)
-0.06
-0.04
-0.02
0
0.02
0.04
0.06
Nm
PITCH Torque control
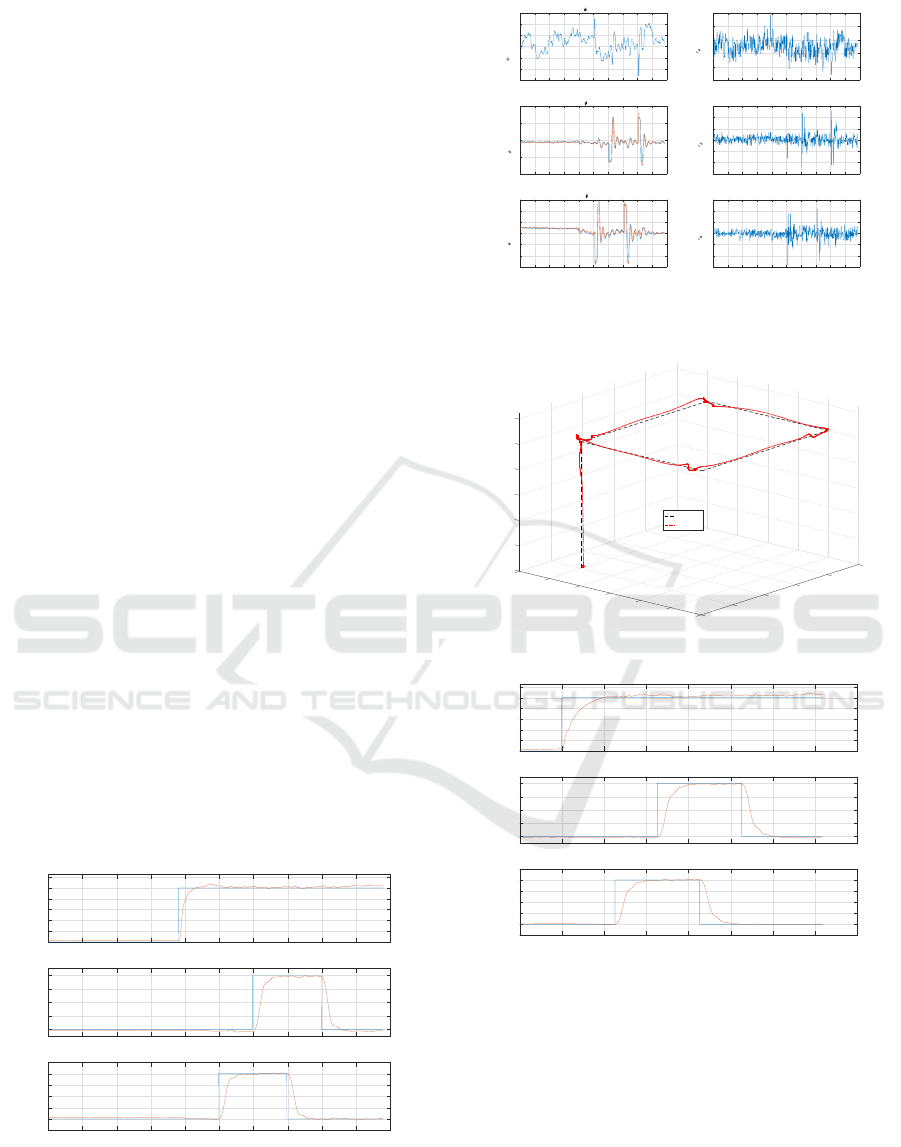
Figure 6: Real Torques and desired angles ROLL, PITCH
and YAW with a PD controllers.
1
0
-2.5
0.2
0.5
0.4
-2
X-Y-Z trajectory PD controller
0.6
Z position in metres
0
-1.5
0.8
Y position in metres
1
X position in metres
-1
-0.5
1.2
-0.5
-1
0
-1.5
0.5
Desired Trajectory
Trajectory
Figure 7: Real 3D trajectories using a PD controllers.
0 500 1000 1500 2000 2500 3000 3500 4000
time in (ms)
0
0.2
0.4
0.6
0.8
1
1.2
Altitude in metres
Altitude BS controller
0 500 1000 1500 2000 2500 3000 3500 4000
time in (ms)
-1
-0.5
0
0.5
1
Y position in metres
Y trajectory BS controller
0 500 1000 1500 2000 2500 3000 3500 4000
time in (ms)
-2.5
-2
-1.5
-1
-0.5
0
0.5
X position in metres
X trajectory BS controller
Figure 8: Real XYZ displacement with a BS controllers.
7 CONCLUSIONS
This paper presents the development of a quadrotor
control system for orientation and position control,
using the onboard IMU and Optitrack system to feed-
back current signals. On one hand the implementation
of the algorithms for orientation control was possible
using the HLP from the autopilot, the program was
developed on C and the execution rate was 1 kHz. On
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
680
0 500 1000 1500 2000 2500 3000 3500 4000
time in (ms)
-0.02
0
0.02
0.04
0.06
0.08
0.1
YAW( ) angle in radians
YAW( ) PD controller
0 500 1000 1500 2000 2500 3000 3500 4000
time in (ms)
-15
-10
-5
0
5
Nm
10
-3
YAW Torque control
0 500 1000 1500 2000 2500 3000 3500 4000
time in (ms)
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
ROLL( ) angle in radians
ROLL( ) PD controller
0 500 1000 1500 2000 2500 3000 3500 4000
time in (ms)
-0.1
-0.05
0
0.05
0.1
Nm
ROLL Torque control
0 500 1000 1500 2000 2500 3000 3500 4000
time in (ms)
-0.3
-0.2
-0.1
0
0.1
0.2
0.3
PITCH( ) angle in radians
PITCH( ) PD controller
0 500 1000 1500 2000 2500 3000 3500 4000
time in (ms)
-0.1
-0.05
0
0.05
0.1
Nm
PITCH Torque control
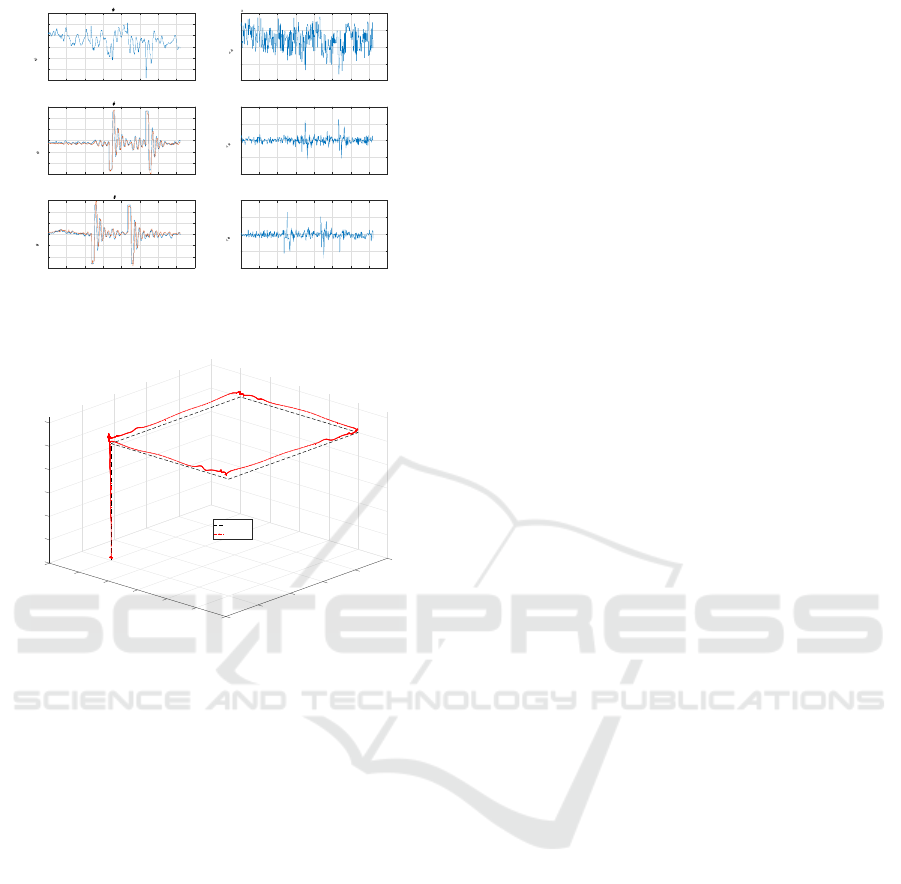
Figure 9: Real Torques and desired angles ROLL, PITCH
and YAW with a BS controllers.
1
0
-2.5
0.2
0.5
-2
0.4
0.6
X-Y-Z trajectory BS controller
-1.5
0
Z position in metres
Y position in metres
0.8
X position in metres
-1
-0.5
1
-0.5
1.2
-1
0
-1.5
0.5
Desired Trajectory
Trajectory
Figure 10: Real 3D trajectories using a BS controllers.
the other hand for positioning control the control al-
gorithms were developed under C++ and ROS, which
allow us to create a network where the ground sta-
tion, robots and sensors can exchange information at
120 Hz. The Drone performance was tested using
an square trajectory with 2 metres side, which was
enough to move the desired roll and pitch angles and
see their control response with the PD controller. The
desired angles was reached within a short period of
time, for instance 0.25 rad in 100 ms on the experi-
mental results for roll angle as figure 6 shows. Re-
garding positioning control, a linear PD controller and
a non linear Backstepping controller were tested, get-
ting a better response for X and Y position with the
Backstepping controller in figure 8 than the PD in fig-
ure 5, whereas for the altitude Z the PD controller had
a quicker response compared with BS as shown in fig-
ures 7 and 10.
REFERENCES
Bouabdallah, S. and Siegwart, R. (2005). Backstepping and
sliding-mode techniques applied to an indoor micro
quadrotor. Proceedings - IEEE International Confer-
ence on Robotics and Automation, 2005(April):2247–
2252.
Campbell, J., Hamilton, J., Iskandarani, M., and Givigi, S.
(2012). A systems approach for the development of a
quadrotor aircraft. In SysCon 2012 - 2012 IEEE In-
ternational Systems Conference, Proceedings, pages
110–116.
Castillo, P., Lozano, R., and Dzul, A. (2005). Stabilization
of a mini rotorcraft with four rotors: Experimental
implementation of linear and nonlinear control laws.
IEEE Control Systems Magazine, 25(6):45–55.
Corona-Sanchez, J. J. and Rodriguez-Cortes, H. (2013). Ex-
perimental real-time validation of an attitude nonlin-
ear controller for the quadrotor vehicle. In 2013 Inter-
national Conference on Unmanned Aircraft Systems,
ICUAS 2013 - Conference Proceedings, pages 453–
460.
Das, A., Lewis, F., and Subbarao, K. (2009). Backstepping
approach for controlling a quadrotor using lagrange
form dynamics. Journal of Intelligent and Robotic
Systems: Theory and Applications, 56(1-2):127–151.
Gomes, L. L., Leal, L., and Oliveira (2016). Unmanned
quadcopter control using a motion capture system.
IEEE Latin America Transactions, 14(8):3606–3613.
Khatoon, S., Gupta, D., and Das, L. K. (2014). Pid &
lqr control for a quadrotor: Modeling and simulation.
Proceedings of the 2014 International Conference on
Advances in Computing, Communications and Infor-
matics, ICACCI 2014, pages 796–802.
Kim, P. (2010). Kalman Filter for Beginners with MATLAB
Examples. A-JIN, Republic of Korea, 1 edition.
Mashood, A., Mohammed, M., Abdulwahab, M., Abdul-
wahab, S., and Noura, H. (2016). A hardware setup
for formation flight of uavs using motion tracking sys-
tem. In ISMA 2015 - 10th International Symposium on
Mechatronics and its Applications.
Reyes-Valeria, E., Enriquez-Caldera, R., Camacho-Lara, S.,
and Guichard, J. (2013). Lqr control for a quadrotor
using unit quaternions: Modeling and simulation bt -
electronics, communications and computing (coniele-
comp), 2013 international conference on. pages 172–
178.
Runcharoon, K. and Srichatrapimuk, V. (2013). Slid-
ing mode control of quadrotor. 2013 International
Conference on Technological Advances in Electrical,
Electronics and Computer Engineering (TAEECE),
(1):552–557.
Saif, A. A. H. (2009). Quadrotor control using feedback
linearization with dynamic extension. 2009 6th Inter-
national Symposium on Mechatronics and its Applica-
tions, ISMA 2009, (1):25–27.
Zheng, H., Zeng, Q., Chen, W., Zhu, H., and Chen, C.
(2016). Improved pid control algorithm for quadrotor
based on mcs. In Proceedings of 2016 IEEE Chinese
Guidance, Navigation and Control Conference, num-
ber 1, pages 1780–1783, Nanjin, China.
Real-Time Setup with PD and Backstepping Control for a Pelican Quadrotor
681
