Review of the Best MPPT Algorithms for Control of PV Sources
RUCA Tracking Algorithm
Nacer K. M’Sirdi
1
, Abdelhamid Rabhi
2
and Bechara Nehme
1
1
Aix Marseille Universit
´
e, CNRS, ENSAM, Universit
´
e de Toulon, LSIS UMR 7296, 13397, Marseille, France
2
MIS, Laboratory of Modeling Information and Systems, Picardie Jules Vernes University, Amiens, France
Keywords:
Maximum Power Point Tracking, Perturb and Observ Algorithm (PO), IncCond, Hill Climbing, Boost
Converter, Robust Unified Control Algorithm (RUCA).
Abstract:
Renewable energies, has generated more and more interest of research in control of the HyRES. Thousand of
papers deal with MPPT (Maximum Power Point Tracking) to optimize harnessing solar energy. The intent of
this paper is to review the most interesting Algorithm and to propose a Robust Unified Tracking Algorithm.
1 INTRODUCTION
The conversion systems of renewable energy sources,
as they include commutations and discontinuities, are
VSAS (Variable Structure Automatic Systems) and
highly dependent on variations in climate parameters,
such as temperature and irradiation (Schaefer, 1990).
A great variety of MPPT methods have been pro-
posed by the researchers and competition between
the algorithms to be implemented continues. A good
classification will help future applications in PV sys-
tems and give a convenient reference on the required
system features.
In this paper, we present a review of the existing
methods, propose a classification and try to find the
best of them. Three categories of MPPT schemes
exist: open loop, closed loop and hybrid methods;
They can also be classified with regard to model based
methods or robust optimisation. Then we propose
a new technique which unify and robustify the al-
gorithms. The Robust Unified Control Algorithm is
proposed to track the maximum power point (VSAS-
MPPT) based on Variable Structure Automatic Sys-
tems approach.
The purpose of this study is also to analyze
and compare execution efficiency for the proposed
RUCA-MPPT algorithms to well known power con-
trol type MPPT methods, including Perturbation and
Observation (P&O), Incremental Conductance (In-
Cond) and Hill Climbing (HC) methods, simulated
in Matlab/Simulink environment in order to compare
their performance (Yu and Shen, 2009; Tavares et al.,
2009; Xiao and Dunford, 2004).
The paper is organized as follows. The second
section presents standard photovoltaic system equa-
Figure 1: Equivalent circuit model of PV panel.
tions and features. Section three reviews the differ-
ent control algorithms proposed for tracking the max-
imum power point (MPP) and then in section four the
analysis and discussion lead us to introduce our new
algorithm. After VSAS-MPPT definition, we com-
pare the results of the RUCA with the widely used
MPPT algorithms; the performance is evaluated on
the energy point of view, in simulation, considering
different actual solar irradiation measured variations.
Finally, a conclusion summarizes the work and pro-
poses perspectives.
2 RENEWABLE ENERGY
SOURCES
PV modules (panels) are composed by combination of
several solar cells, connected in series and in parallel
circuits, to generate higher power (Liu et al., 2008).
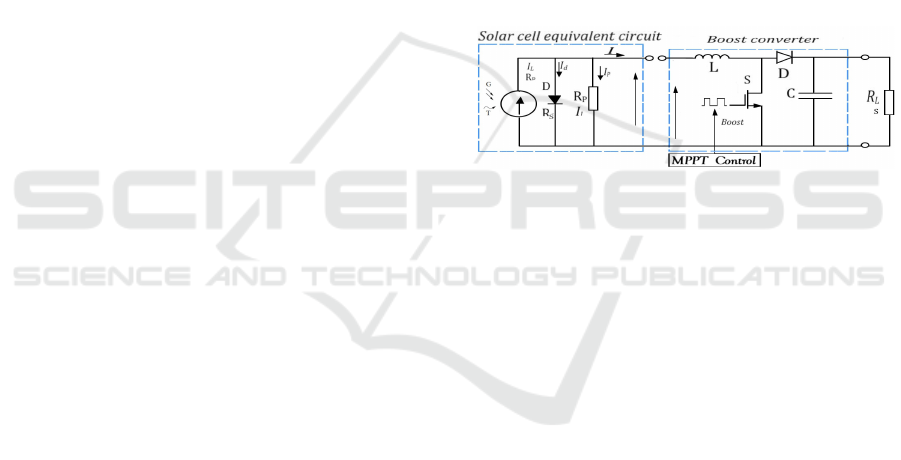
The equivalent circuit of the general model, as il-
lustrated in left of figure 1, consists of a photo-current,
diodes, a parallel resistor expressing a leakage cur-
rent, and a series resistor describing an internal resis-
tance to the current flow.
The PV circuit is connected to the load (R
L
) trough
a DC-DC converter in order to adjust (adapt) the op-
318
M’Sirdi, N., Rabhi, A. and Nehme, B.
Review of the Best MPPT Algorithms for Control of PV Sources - RUCA Tracking Algorithm.
DOI: 10.5220/0006461503180325
In Proceedings of the 14th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2017) - Volume 1, pages 318-325
ISBN: 978-989-758-263-9
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

erating voltage and current of the PV panel at optimal
values to maximize the harnessed power. The control
of the boost has to tracks the Maximum Power Point
(figure 2).
Mathematical description of I(V) Input/Output
characteristics for a PV cell has been studied for over
the past four decades. The PV system exhibits then
a nonlinear I(V) characteristic which depend on the
temperature and the solar radiation which vary during
a day. The PV characteristics (I = f (V) and Ppv =
f (V)) are represented by the figure 2 under constant
temperatures (Ta=10, 30, 50 and 70
◦
C) and irradia-
tion Gs=1000 w/m2.
Figure 2: a) I-V characteristic I = f (V
pv
) and b) P-V char-
acteristic curve P
pv
= f (V ) of PV module.
Te DC-DC converter is used as a power interface
circuit between the PV panel and the load or bat-
tery. This circuit consists, in its simple way, of only a
switch (typically a MOSFET), an inductor, and a ca-
pacitor connected as shown in figure 1. To achieve
the optimum matching and track the power Maximis-
ing point, a good control of the DC-DC is necessary.
3 THE MPPT CONTROL
3.1 The Open Loop Methods for MPPT
3.1.1 Fixed Operating Point
The problem is to find the voltage V
MPP
or the cur-
rent I
MPP
at which the PV array delivers the maxi-
mum power under a given temperature T and irradi-
ance G. Then the method automatically puts the PV
in this condition. The first remark was that the MPP
varies in a small region and that on the left part of the
P-V characteristic, the slope P/V is roughly constant.
Fractional Open-circuit Voltage. The first method
uses the observation that, the ratio between array volt-
age at maximum power V
MPP
to its open circuit volt-
age V
OC
is nearly constant.
V
MPP
V
OC
≈k
1
. The factor k
1
is not constant but, has been remarked to be between
0.71 and 0.78. Once the constant k1 is known, V
MPP
can be computed.
This method consists in measuring V
OC
periodi-
cally and then fixing V
MPP
= k
1
V
OC
.
The implementation is simple and cheap, but the
tracking efficiency is relatively low due to inaccurate
values of the constant k
1
in the computation of V
MPP
.
Fractional Short-circuit Current. This method is
based on the remark that the current at maximum
power point I
MPP
is approximately proportional to the
short circuit current I
SC
of the PV array. I
MPP
≈k
2
.I
SC
The factor k
2
is not constant but, has been re-
marked to be between 0.78 and 0.92. Once the con-
stant k1 is known, V
MPP
can be computed.
The accuracy of this method and its tracking ef-
ficiency depend on the accuracy of knowledge of k
2
and the periodic measurement of short circuit current
I
SC
.
3.1.2 Artificial Neural Networks, ANN for
MPPT
ANN are well known to provide universal approxi-
mators providing non-linear models which are com-
plementary to the conventional modeling techniques.
Back propagation ANN are used as pattern classi-
fier or as non-linear layered feed-forward networks to
give a global approximations to a non-linear input-
output mapping (Reisi et al., 2013). The first applica-
tion of ANNs to MPPT, has been proposed by Hiyama
et al (Hiyama and Kitabayashi, 1997).
In general a three layer structure, i.e. input layer,
hidden layer and output layer are used with the back
propagation. After a good learning, ANN are able
to make generalizations in regions of the phase space
where little is known or no data are available. The
Neural network is composed by neuron cells, placed
in 3 layers (or may be more) connected to all neurons
through weights see figure below. The input variables
are PV parameters like V
OC
and I
SC
, atmospheric data
(Irradiance and Temperature). The output of ANN
gives reference signals, like the reference voltage or
the duty cycle signal used to drive the power converter
to operate at or close to the MPP.
The three layers of neural network have a hyper
tangent sigmoid function (Noguchi et al., 2002). The
algorithm used for training is back-propagation. The
back-propagation training algorithm needs inputs and
the desired output to adapt the weight by MSE.
The characteristics of a PV array are nonlinear and
time-varying, this implies that the neural network has
to be trained to guarantee accurate tracking of MPP.
This is a time consuming process. Note also that it can
use as inputs the voltage and current measurement,
to become a closed loop method or a combination of
both.
Review of the Best MPPT Algorithms for Control of PV Sources - RUCA Tracking Algorithm
319

3.1.3 Fuzzy Logic Method (FL)
Fuzzy logic controllers offer the advantage of work-
ing capability with imprecise inputs, and do not need
an accurate mathematical model. They can han-
dle nonlinearities, and have fast convergence. Their
learning ability and accuracy depend on the number
on the fuzzy levels and the the membership functions.
The decision-making uses rules specified by a set of
IF–THEN statements to define the control which pro-
duce the desired behavior. The defuzzification stage,
operates the reverse function to get numerical vari-
ables for analog control using the membership func-
tion.
In order to track MPP, the error is computed based
on irradiance and temperature or instantaneous values
such as power and voltage (Algazar et al., 2012). The
output signal is either the duty cycle itself, or V
MPP
and I
MPP
reference to generate the duty cycle.
The membership function associated with fuzzi-
fication and defuzzification, as well as the antecedent
and the consequent fuzzy rules are determined by trial
and error. This can be time-consuming. This method
can be used in open loop or in closed loop when us-
ing as feedback (in real time) the output variables like
current, voltage and the power.
3.2 The Closed Loop MPPT
3.2.1 Perturb and Observe Methods
The most commonly used MPPT algorithm is the Per-
turbation and Observation (P&O) due to its easy im-
plementation. It uses the P-V characteristics P
pv
=
f (V ) of the PV module shown in figure 3 (b). Note
that the point of maximum power P(n)=V(n)I(n) is ob-
tained when the condition
dP
dV
= 0 is accomplished, re-
gardless of the sun irradiance magnitude (Kim et al.,
2001). In actual experiments, the system oscillates ar-
roumd the MPP. To minimize the oscillations ampli-
tude, we can reduce the perturbation step size. How-
ever, small step size slows down the convergence of
the MPPT.
The Modified Enhanced Perturb and Observe
(MEPO) algorithm uses and adaptive step adjustment
gain and simplify the implementation using on com-
mutation functions. This algorithm have been revis-
ited, its rationale behind have been clarified and then
implementation obviated using commutation func-
tions (Msirdi and Nehme, 2015).
3.2.2 Incremental Conductance Methods
The incremental conductance (IncCond) (Femia et al.,
2004), method is based on the fact that the slope (or
the PV conductance G =
dI
dV
) of the PV array, in the
power curve is zero at the MPP and it is positive (con-
stant) on the left of the MPP. The slope becomes neg-
ative on the right of th MPP.
3.2.3 Hill Climbing Method
The basic idea of the HC (Hill Climbing) method is
the same as P&O method. It tests if P(n) is greater
than P(n-1) or not, to reach MPP. The PO method uses
instead a test on dP/dV to determine whether the max-
imum power point has been found or not. However,
the HC method uses a test condition on P(n)-P(n-1).
3.2.4 Extremum Seeking Control Method (ESC)
Krstic et al. (Ariyur and Krstic, 2003), from au-
tomatic control community interested on robust and
adaptive control techniques, proposed an adaptive
ESC methodology which has been proved to be ro-
bust against parametric uncertainties for non linear
dynamic uncertain systems. It is based on theories
namely averaging theory, adaptive control and singu-
lar perturbation techniques. This real-time optimiza-
tion ESC method has been successfully applied in var-
ious systems and has been specifically adapted for PV
systems in order to track MPP (Leyva et al., 2006;
Brunton et al., 2010). Extension to ESC by Newton
Like optimisation has been also considered and com-
pared to other ESC based methods (Zazo et al., 2012).
The objective of ESC is to rapidly reach the MPP de-
spite uncertainties and disturbances on the PV panel
and the load.
The reference current is perturbed by a sinusoidal
modulation. The power got at the output of the PV
system is high pass filtered, to get only effect of
the perturbation (4P(t)) on the obtained power P(t).
Then, after the ripple demodulation to get the pro-
duced power perturbation observed (ξ(t)), integration
with an adaptive gain C(p) of this effect gives the ref-
erence current. The adaptation gain C(p) is adjusted
by a theoretical study to get fast convergence to the
optimum power (MPP). The controller will, therefore,
adjust the reference current until MPP is reached.
The main advantages of ESC are that the power
optimization is got by a dynamic adaptation-based
feedback for a sinusoidal perturbation and conver-
gence to the MPP is guaranted. This approach does
not require any parametrization or structural formal-
ization of the modeling uncertainty. The disadvantage
of ESC is its complexity and the implementation dif-
ficulties regard to PO and MEPO.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
320

3.2.5 RSMCA: Robust Sliding Mode Control
Algorithm
A lot of algorithms have been proposed based on
Sliding Mode. The most of them are not very pre-
cise when defining the objective of the algorithm and
chosing the sliding surface. They simply has been de-
velop as alternative to use of a standard regulator like
PID controller. This reduces the efficiency of the Slid-
ing Mode Approach and does not tackle the robustnes
problem. The most of them use a sliding surface to
reach the MPP. The best choice seems to be given by
the proposed criteria in equations (1 and 2).
In the following we propose an MPPT based on
the VSAS and the Lyapunov theory which general-
izes all the previous algorithms. The desired objective
to get is that the MPP reached when the maximum
power is obtained
dP
dt
= 0.
Note that the optimization is done versus time be-
cause P varies during time in function of the voltage
V and the current I. Only if current I (respectively
the voltage V) is maintained constant we can consider
P(V) (respectively P(I)) characteristic. Note also that
in real weather condition the Operating Point do not
moves on a unique (P-V) characteristic. If the irradia-
tion or the temperature changes the MPP varies from
one curve to another one.
Then as P(t) = V (t).I(t) = f (V, I,t), the power is
function of the voltage, the current and time, then the
required Maximum Power Point to Track is really de-
fined by the following objective function which we
propose to take as the generic sliding surface:
dP
dt
=
dV I
dt
= I
dV
dt
+V
dI
dt
= 0 (1)
Let us consider the control in case of discrete
time, like do all the above presented algorithms,
with the previously defined variables (see equation
5) the fetched MPPT may be defined by ∆P(k) = 0,
then as
dP
dt
= 0 can be approximated by ∆P(k) =
(I(k)∆V (k) +V (k)∆I(k)).4t
The objective function that we propose in
(M’Sirdi et al., 2014) becomes then:
∆P(k) = I(k)∆V (k) +V (k)∆I(k) = 0 (2)
The control variable is either, in the first case,
u
1
(k) = 4V (k), which means that the voltage per-
turbed and the current is fixed u
2
(k) = 4I(k) = 0,
or in the second case, the control variable is u
2
(k) =
4I(k), the current is pertubed and the voltage is fixed
u
1
(k) = 4V (k) = 0. In control context, the previously
presented MPPT controllers use only one control
variable u
1
or u
2
and impose the second to zero. Let
us consider the MPP reaching condition
dP(t)
dt
= 0 and
note that the maximum power is always P
max
≥ P(t)
every where and at any time. We can choose as Slid-
ing Surface s(t) = P
max
− P(t) which goes to zero (or
at least to its minimum) when P(t) = P
max
(Msirdi
and Nehme, 2015). We can also take zero instead of a
positive constant P
max
= 0.
Let us then consider the Lyapunov like function
W (t) = s
2
= [P
max
− P(t)]
2
> 0 which is strictly pos-
itive every where except at the MPP where it goes to
zero. Lyapunov based control design is well known
to give robust algorithms.
The derivative of this Lyapunov function W (t) =
s
2
> 0, is
˙
W = s ˙s = −[P
max
− P(t)] .
dP(t)
dt
.
This term is negative when −
dP(t)
dt
= −I
dV
dt
−
V
dI
dt
<0. This equation is similar to the proposed Slid-
ing Surface equations (1 2 12). Please note also the
similarity with the InCond equation (13). This means
obviously that we only need, from control, to make
dP(t)
dt
> 0, to reach the MPP.
as we impose
dI
dt
= 0, we get
˙
W = −I
dV
dt
It can be made negative by choosing the appro-
priate control laws u
1
(k) = 4V (k) and u
2
(k) = 0.
Note that this can be reached by choosing the sign
of u
1
(k) = V (k), such as to get
˙
W < 0.
Choosing u
1
(k) = 4V (k) =
4P(k).α.sign(4V (k)) and knowing that we
impose u
2
(k) = 4I(k) = 0 like in the con-
trol algorithm, we have previously proposed
MEPO (Msirdi and Nehme, 2015). This gives us
4W = −α.4P(k).sign(4V (k))I(k). If the gain
parameter α is positive constants, we then get a
negative derivative
4W = −α.∆V (k).sign(4V (k))I
2
(k) < 0 (3)
This method, called MEPO (Modified Enhanced
Perturb and Observ) gives an enhanced and variable
step size algorithm. The step size is adjusted in pro-
portionally to the power variation produced in the pre-
vious step. The step adjustment gain K = α.4P(k) is
used for weighting this adjustment step. It may be
useful for oscillation avoidance and noise sensitivity.
This proves, theoretically the convergence of the
RSMC algorithm and shows that Robust Sliding
Mode Control is equivalent to the MEPO algorithm
got by enhancement of the P&O.
We propose, as a modified PO Algorithm which
will be more robust, the reference voltage is given by
V re f = V k + α.4P.sign(4V ) (4)
The algorithms have been tested under various oper-
ating conditions. The obtained results have proven
that the MPPT is tracked even under sudden change
of irradiation level.
Review of the Best MPPT Algorithms for Control of PV Sources - RUCA Tracking Algorithm
321

3.2.6 RUCA: Robust Unified Control Algorithm
VSAS (Variable Structure Automatic Systems) con-
trol methodology was applied to clarify the rationale
behind Maximum Power Point Tracking and get the
best optimization algorithm. We have seen previously
that the control is either on voltage or on current in-
put or both. For the proposed RUCA algorithm, both
controls can be used if we look for adjusting both vari-
ables (V and I), either at each control step or alterna-
tively.
Two new algorithms can be developed, using this
approach, the Modified and Enhanced Perturb and
Observe Algorithm (MEPO) if the control input is
on the voltage or the Modified Enhanced InCond
(MEInCond) if the control input is on the current.
For the MEPO and the RSMC, we take for esti-
mation of the power variation ∆P(k) = I(k)∆V (k), the
current is assumed constant.
For the Modified Enhaced InCond (MEInCond),
we consider the current as the only input control and
we take ∆P(k) = V (k)∆I(k), the voltage is assumed
constant.
The Robust Unified Control Algorithm (RUCA)
will do both of them alternatively. Note that the hard-
ware have to be considered in consequence. Com-
pared to the other algorithms like Perturb and Observe
(PO), Hill Climbing, Incremental Conductance (In-
Cond) The RSMC approach it is proven more efficient
and faster despite using low frequency commutation.
It can be noticed that all the previous algo-
rithms can be considered as particular cases of this
one (RUCA), when simplifying the proposed control
method.
The implementation of the proposed RUCA con-
troller can be summarised as follows:
1. The reference voltage is set be equal to the PV
open circuit voltage.
2. Measurement of the of input signals (PV voltage,
PV current and Load voltage).
3. Estimate the PV power at the sample time k :
P
PV
(k) = I
pv
(k)V
pv
(k)
4. Calculate the PV current and the power incre-
ments.
∆I = I
PV
(k) − I
PV
(k − 1)
∆V = V
PV
(k) −V
PV
(k − 1)
∆P = P
PV
(k) − P
PV
(k − 1)
P
PV
(k) = V
PV
(k).I
PV
(k)
(5)
The reference voltage V
re f
(k) is calculated as below,
where α is the perturbation variation step (control
gain). Note that ∆V
re f
= α.sign(∆P∆V ) produces ex-
atly the same result as the classical PO algorithm with
a much more simple implementation (one formula in-
stead of an algorithm chart).
Recall that the system equations have been used
also to define the classical Sliding Mode based algo-
rithms by means of choosing a commutation (sliding)
surface s. The proposed MPPT has several advan-
tages: simplicity, high convergence speed and is in-
dependent on PV array characteristics. In conclusion
let us say that RUCA enhances and generalizes all
the best algorithms presented in litterature and sug-
gest new algorithmes like MEPO and MEInCond.
3.3 Hybrid Tracking Methods HTM
It is well known that combination of OLM (Open
Loop Method) for anticipation with robust feedback
(CLM: Closed Loop Method) gives the best way
to control and track trajectories of uncertain and
time varying systems. In HTM, the control sig-
nal associates OLM, determined according to atmo-
spheric conditions temperature and irradiance, and
CLM based on feedcback control to track MPP. In a
hybrid method consisting of two loops is proposed.
In the first loop MPP is estimated based on the open
circuit voltage at a constant temperature. Several au-
thors use Neural Networks or Fuzzy Logic or combine
Neuro Fuzzy Logic to anticipate on temperature and
radiation effects. Tina et al proposed to use a simpli-
fied model used to evaluate the MPP power in (Tina
and Scrofani, 2008). It seems to be the most efficient
way to predict the MPP.
4 COMPARATIVE STUDY
In this section we present simulations based compar-
ison between different MPPT algorithms. Several al-
gorithms are compared the classical P&O (Perturb
and Observe), the MEPO (Modified Enhanced Per-
turb and Observe), IncCond (Incremental Conduc-
tance), RUCA (Robust Unified Control Algorithm),
and NL-ESC (Newton-Like Extremum Seeking Con-
trol).
The first step, for validation of the implementa-
tion, uses the same simulated model as in the paper
of Zazo et al (Zazo et al., 2012) to compare the dif-
ferent algorithms. The second step is simulation with
the PSIM software of the model of the experimental
setup.
4.1 Simulations with PSIM Software
The physical model of a PV panel is used with a Boost
DC-DC converter using a MOSFET as a switch. The
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
322
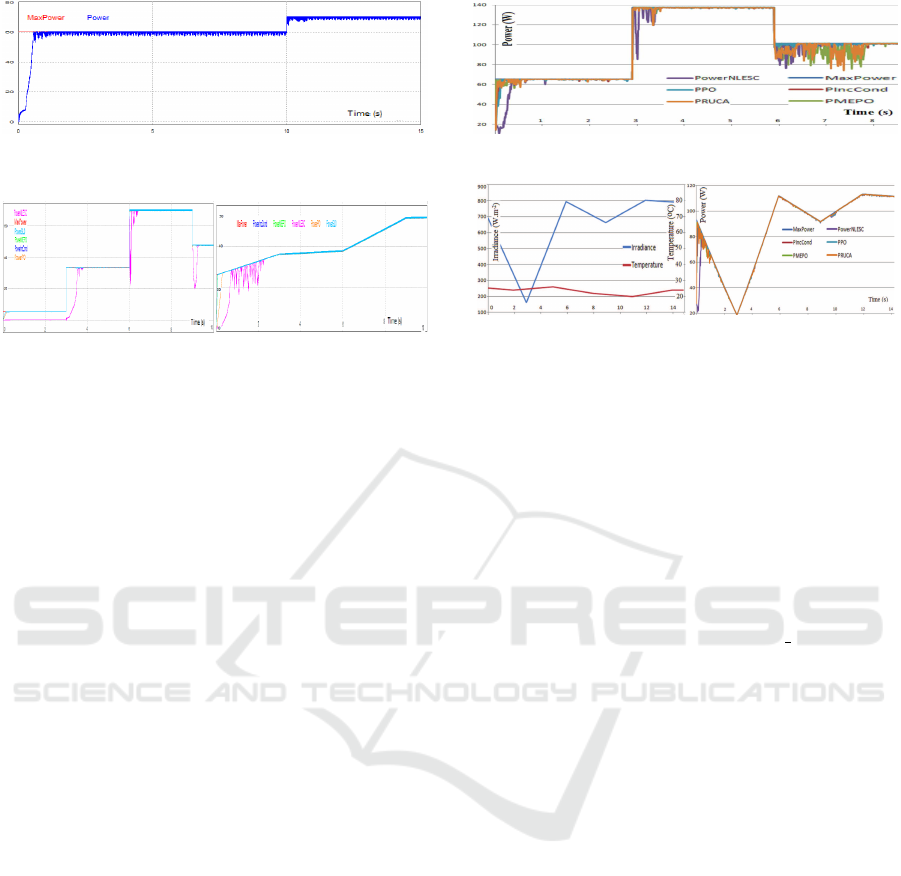
Figure 3: Power output of a PV panel with sudden variation
in irradince controlled with the NL-ESC algorithm.
Figure 4: First order interpolation comparison of the 5 al-
gorithms with real data. Zero order sample and hold com-
parison of the 5 algorithms.
panel is considered to have 36 cells. A boost con-
verter is built;The load is a 100Ω resistor. The al-
gorithms are implemented in a C block and the duty
cycle is calculated from Vref using another C block.
The actual, measured irradiation and panel tempera-
ture, when used, are read from a txt file as input to the
simulation.
We start first by retrieving all the simulation of
the paper of Zazo et al (Zazo et al., 2012) and then
compare to the other algorithms.
In order to compare the 5 algorithms we build un-
der Psim software 5 identical PV systems. Each sys-
tem is controlled by a different MPPT algorihm. The
second simulation is done with the same input irradi-
ance and temperature for the 5 systems. Zero order
sample and hold is applied. The result is shown in
figure 4.
The third simulation is done with first order inter-
polation and shown in figure 5. In this simulation real
weather data and real PV temperature are used.
4.2 Simulation Results
The simulation was performed under Psim software.
The simulated process is composed of two PV pan-
els, a DC/DC converter, and 4 batteries. Each PV
panel is composed of 10 cells mounted in serie. The
panel short circuit current is 5.1 A and it can gen-
erate 62W in STC. The two panels are mounted in
series. The DC/DC converter is a boost (step up con-
verter) mainly made of a capacitor, a self, a diode and
a switching device. The batteries are connected in se-
ries delivering 4 × 12 = 48V .
In order to compare the 5 algorithms we built 5
identical simulation systems. All systems have the
Figure 5: Brutal change in irradiance and temperature.
Figure 6: Simulation for change in irradiance and tempera-
ture. Interpolated change in irradiance and temperature.
same irradiance and temperature inputs.
The step of the P&O algorithm is fixed to 0.1V.
The step of the IncCnd algorithm is also fixed to 0.1V.
The gain of the MEPO algorithm is chosen 25. The
gain of the RUCA algorithm is chosen 25. The gain
of the NL-ESC is 0.15 and the gain of the hessian is
3000.
For the first simulation, we consider an irradiance
of 1000W.m
-2
and a temperature of 25
o
C. We can
see that all the algorithms reach the maximum power
point in less than 0.5 seconds. The NL ESC presents
the less oscillations. The RUCA is the fastest with
decreasing oscillations. Also the MEPO present the
same features. The IncCnd and PO present high os-
cillation and takes time to reach the MPP.
For the second simulation, we consider a zero or-
der sample and hold for the irradiance and tempera-
ture that change. The irradiance and temperature rise
and fall brutally during as shown in figure 3. The sim-
ulation of figure 4 shows how all algorithms manage
to reach the MPP after the brutal variation of environ-
mental conditions. The NL-ESC presents the high-
est oscillation amplitude after the brutal change. The
RUCA and MEPO presents oscillation before stabi-
lizing in the MPP after the brutal change. This is
explained because these last algorithms uses the gra-
dient of power to calculate the step, and after brutal
change of environmental conditions, the power gradi-
ent is high.
For the third simulation, we consider a variation
in irradiance and temperature with first order interpo-
lation. Real data are taken from measurement done
on the 16/5/2012. We can see that all algorithms
reaches the MPP. Oscillations do not occurs because
the power gradient is low.
In summary, the simulation comparison between
the 5 algorithms showed a convergence of all the al-
Review of the Best MPPT Algorithms for Control of PV Sources - RUCA Tracking Algorithm
323

gorithms. Algorithms based on fixed step as P&O and
IncCond must run at high frequency in order to reach
the MPP. Algorithms based on the power gradient as
MEPO and RUCA can operate at lower frequencies.
MEPO, RUCA, and NL-ESC present oscillations in
front brutal variation of irradiance and temperature.
5 CONCLUSION
The best MPPT algorithms of the litterature have been
reviewed and analyzed in this work. This comparison
allowed us to select five of them to be compared in
simulations and experimental application. The sim-
ulations was performed under PSIM software to use
realistic physical models.
The analysis has shown the rationale behind
MPPT and the generalization leading to a unified
framework RUCA, as a Robust Unified Control Algo-
rithm. The well known algorithms can be viewed as
particular cases of the RUCA. The proposed approach
RUCA generalizes the PO, the InC, the ESC and the
Sliding Mode Control schemes to non linear systems
with commutations. The proposed MPPT has several
advantages: simplicity, high convergence speed, and
is independent on PV array characteristics. The ob-
tained results have proven that the MPPT is tracked
even under sudden change of irradiation level or tem-
perature.
The algorithms are tested under various operating
conditions. Realistic simulations are used to show
ease of implementation of our new algorithm, and to
compare its execution efficiency and accuracy to the
the studied MPPT methods.
In summary the best algorithms are those designed
using the SASV-MPPT approach and Lyapunov de-
sign method considering that the PV system can move
from one characteristic to another. The proposed al-
gorithms are the most efficient despite using low fre-
quency commutation. They are the faster converging.
REFERENCES
Algazar, M. M., El-Halim, H. A., Salem, M. E. E. K.,
et al. (2012). Maximum power point tracking using
fuzzy logic control. International Journal of Electri-
cal Power & Energy Systems, 39(1):21–28.
Ariyur, K. B. and Krstic, M. (2003). Real-time optimization
by extremum-seeking control. John Wiley & Sons.
Brunton SL, Rowley CW, Kulkarni SR, Clarkson C. Max-
imum power point tracking for photovoltaic opti-
mization using ripple-based extremum seeking con-
trol. IEEE Transactions on Power Electronics 2010;
25(10): 2531-40.
Femia, N., Petrone, G., Spagnuolo, G., and Vitelli, M.
(2004). Optimizing duty-cycle perturbation of p&o
mppt technique. In Power Electronics Specialists
Conference, 2004. PESC 04. 2004 IEEE 35th Annual,
volume 3, pages 1939–1944. IEEE.
Hiyama, T. and Kitabayashi, K. (1997). Neural network
based estimation of maximum power generation from
pv module using environmental information. IEEE
Transactions on Energy Conversion, 12(3):241–247.
Kim, T.-Y., Ahn, H.-G., Park, S. K., and Lee, Y.-K. (2001).
A novel maximum power point tracking control for
photovoltaic power system under rapidly changing so-
lar radiation. In Industrial Electronics, 2001. Proceed-
ings. ISIE 2001. IEEE International Symposium on,
volume 2, pages 1011–1014. IEEE.
Leyva R, Alonso C, et al. MPPT of Photovoltaic Sys-
tems using Extremum- Seeking control. IEEE Trans-
actions on Aerospace and Electronic Systems 2006;
42(1) :249-58.
Liu, F., Kang, Y., Zhang, Y., and Duan, S. (2008). Com-
parison of p&o and hill climbing mppt methods for
grid-connected pv converter. In Industrial Electronics
and Applications, 2008. ICIEA 2008. 3rd IEEE Con-
ference on, pages 804–807. IEEE.
Msirdi, N. and Nehme, B. (2015). The vsas approach gives
the best mppt for solar energy sources. Renewable
Energy and Sustainable Development, 1(1):60–71.
M’Sirdi, N., Nehme, B., Abarkan, M., and Rabbi, A.
(2014). The best mppt algorithms by vsas approach
for renewable energy sources (res). In Environmental
Friendly Energies and Applications (EFEA), 2014 3rd
International Symposium on, pages 1–7. IEEE.
Noguchi, T., Togashi, S., and Nakamoto, R. (2002). Short-
current pulse-based maximum-power-point tracking
method for multiple photovoltaic-and-converter mod-
ule system. IEEE Transactions on Industrial Electron-
ics, 49(1):217–223.
Reisi, A. R., Moradi, M. H., and Jamasb, S. (2013). Clas-
sification and comparison of maximum power point
tracking techniques for photovoltaic system: A re-
view. Renewable and Sustainable Energy Reviews,
19:433–443.
Schaefer, J. (1990). Review of photovoltaic power plant
performance and economics. IEEE Transactions on
Energy Conversion, 5(2):232–238.
Tavares, C. A., Leite, K. T., Suemitsu, W. I., and Bellar,
M. D. (2009). Performance evaluation of photovoltaic
solar system with different mppt methods. In Indus-
trial Electronics, 2009. IECON’09. 35th Annual Con-
ference of IEEE, pages 719–724. IEEE.
Tina, G. and Scrofani, S. (2008). Electrical and thermal
model for pv module temperature evaluation. In Elec-
trotechnical Conference, 2008. MELECON 2008. The
14th IEEE Mediterranean, pages 585–590. IEEE.
Xiao, W. and Dunford, W. G. (2004). A modified adap-
tive hill climbing mppt method for photovoltaic power
systems. In Power Electronics Specialists Conference,
2004. PESC 04. 2004 IEEE 35th Annual, volume 3,
pages 1957–1963. Ieee.
ICINCO 2017 - 14th International Conference on Informatics in Control, Automation and Robotics
324

Yu, T.-C. and Shen, Y.-T. (2009). Analysis and simulation
of maximum power point tracking for photovoltaic
systems. In Proceedings of the 30th ROC Symposium
on Electrical Power Engineering, Taoyuan, Taiwan,
pages 92–96.
Zazo, H., Del Castillo, E., Reynaud, J. F., and Leyva, R.
(2012). Mppt for photovoltaic modules via newton-
like extremum seeking control. Energies, 5(8):2652–
2666.
Review of the Best MPPT Algorithms for Control of PV Sources - RUCA Tracking Algorithm
325
