
Implementation and Evaluation of an On-demand Bus System
Sevket G
¨
okay
1,2
, Andreas Heuvels
1
, Robin Rogner
1
and Karl-Heinz Krempels
1,2
1
Informatik 5 (Information Systems), RWTH Aachen University, Aachen, Germany
2
CSCW Mobility, Fraunhofer FIT, Aachen, Germany
Keywords:
Demand-responsive Transport, Dynamic Pickup and Delivery Problem, Vehicle Routing Problem with Time
Windows.
Abstract:
This work aims to develop and evaluate a dynamic bus system which abandons the concepts of a traditional
bus service like bus line, bus station and timetable. The resulting system supports bringing customers from
any location to any location, has a fleet of buses the routes of which are updated repeatedly as requests arrive
and are accepted, and employs time windows in order to guarantee the desired pick-up and drop-off times of
customers. We propose a technical realization and evaluate its effectiveness by running simulations in which
traditional and dynamic systems are compared. Even though the operational cost and financial efficiency
from a bus service provider’s perspective is not the focus of this evaluation, the preliminary results show that
both the provider and the customers might benefit from an on-demand dynamic system. We also hint at the
feasibility of such a system in not only low-demand rural areas, but also high-demand urban regions.
1 INTRODUCTION
With the ever-improving technology landscape, tradi-
tional and existing systems are challenged with new
ideas that aim for optimization by making them more
intelligent. Transportation systems have always been
such a target and more specifically, public transporta-
tion benefited immensely from advancements in IT
and mobile Internet becoming more widespread. The
operation of public transport bus services currently
bases on buses traveling along fixed routes visiting
predefined bus stops according to a fixed timetable.
This is the product of efforts in public transportation
planning where many factors of all stakeholders are
taken into account in order to find an optimal solu-
tion covering the majority of the needs. Naturally, the
main focus is on urban areas where a high demand
for transportation exists. However, in less populated
rural areas the service offerings are inferior and bus
transportation should be adapted to their special re-
quirements.
This work addresses the issue of fixed routes and
bus stops by proposing a system in which the passen-
gers put requests to the service to be picked up from
any location to travel to any location within the ser-
vice area. Subsequently, the service finds a bus in
operation (from a list of buses), assigns the request to
the bus and updates the route of the bus. This kind
of service operation results in buses having dynamic
routes.
We denote the system as online full on-demand
riding system, in which requests are processed in real
time during service time (online – as opposed to off-
line on-demand systems which collect requests be-
fore service, calculate a schedule which is fixed af-
terwards during the operation of the vehicle) and ar-
bitrary coordinates are used for pick-up/drop-off (full
– as opposed to semi on-demand systems which func-
tion based on fixed stations or locations).
Motivation
The aim of the project Mobility Broker
1
was to inte-
grate multiple mobility services (e. g. bus, train, car-
sharing, bike-sharing) into one platform using stan-
dardized communication interfaces, i. e. IXSI
2
. The
platform becomes the one stop shop for the mobility
needs of its customers. This way customers have to
interface with only one entity when planning an inter-
modal itinerary and can book one combined ticket in-
stead of multiple mode-specific tickets (Beutel et al.,
2014). It was, therefore, essential that the platform
supports intermodal routing taking all integrated ser-
vices into account (Beutel et al., 2016).
1
https://mobility-broker.com/
2
Interface for X-Sharing Information (Kluth et al., 2015)
Gökay, S., Heuvels, A., Rogner, R. and Krempels, K-H.
Implementation and Evaluation of an On-Demand Bus System.
DOI: 10.5220/0006300102170227
In Proceedings of the 3rd International Conference on Vehicle Technology and Intelligent Transport Systems (VEHITS 2017), pages 217-227
ISBN: 978-989-758-242-4
Copyright © 2017 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
217

During the analysis of status quo of mobility ser-
vice offerings it was realized that low population den-
sity – rural – areas suffer from three shortcomings:
1. There are only a small number of mobility ser-
vices being offered: Most service providers con-
centrate on urban regions, leaving rural areas out
of their coverage plan (e. g. car-sharing).
2. Low service quality of existing services compared
to urban regions: Considering the example of bus
services, they mostly have less stations (i. e. sta-
tions are more distant from each other) and the
buses are driving less frequently (i. e. increased
waiting periods).
3. Rural areas can be sparsely connected to urban ar-
eas (or town centers).
These lead to bad customer experience which we
wanted to challenge: Is it possible to provide an alter-
native, better service in rural areas and how can it be
realized? How can we integrate this service into Mo-
bility Broker, making the journeys between rural and
urban areas seamless? Can the system be deployed in
urban areas as well? In urban areas, can the system
match or even surpass the quality of service of the
traditional services (e. g. in peak hours)? And on a re-
lated note, would the system be only a supplement to
existing offerings or could it replace existing services
in urban areas?
The remainder of this paper is structured as fol-
lows: Section 2 lists related research and existing ap-
plications in the field of interest. Consequently, the
taken iterative approach is explained in Section 3.
Section 4 presents the tools and details of technical
realization. It is followed by Section 5 that illustrates
the evaluation methodology and results. Finally, Sec-
tion 6 concludes the paper.
2 RELATED WORK
This section gives a general impression of related
work done in the field of interest.
Demand Responsive Transport (DRT) is the um-
brella term to describe and categorize the efforts to
develop transportation services based on demand. In
particular, the underlying problem is known as the
Dial-A-Ride Problem (DARP). DARP aims to find
vehicle routes and schedules for k customers where
each customer defines the pickup and delivery loca-
tion, and the pickup or delivery time. DARP gen-
eralizes the Traveling Salesman Problem (TSP) and
is therefore NP-hard (Gørtz, 2006). Due to the need
in practical applications and its NP-hardness, many
heuristic algorithms can be found in scientific liter-
ature. In (Savelsbergh and Sol, 1995) the authors
present the general problem of pickup and delivery, its
varying forms (DARP being one of them), the char-
acteristics and solution approaches. An overview of
models and algorithms can be found in (Cordeau and
Laporte, 2007) and (Desaulniers et al., 2001). These
works also unveil subcategories of DARP: Offline and
online, single-vehicle or multi-vehicle, without time
constraints or with time windows. In this context, a
more focused overview, i. e. an overview of vehicle
routing with time windows, is given in (El-Sherbeny,
2010).
An optimization method for improving or design-
ing a traditional bus network for a small- or medium-
sized town has been proposed in (Amoroso et al.,
2010). The authors present a modeling framework
with an iterative approach to improve existing bus
lines in order to maximize an objective function. The
objective function takes user demand as well as op-
eration cost of the network into account. The work
in (Crainic et al., 2010) deals with the design of a
master schedule for a demand-adaptive transit system
(DAS), which is a hybrid between traditional bus ser-
vice and an on-demand system usually offered in low
demand transportation areas. The proposal employs a
set of mandatory stops with corresponding time win-
dows and optional stops which are inserted by pas-
sengers. An on-demand bus system which highly
influenced the system proposed by this work is pre-
sented in (Tsubouchi et al., 2010). However, unlike
this work, the presented system uses predefined bus
stops. The system leverages cloud computing to lower
operational costs and computation time. A simulation
and field tests in multiple cities yield promising re-
sults and the authors conclude that, with their heuris-
tic, the calculation time does not increase exponen-
tially. In (Martinez et al., 2006) the authors propose
an online on-demand shuttle system for the University
of Maryland College Park, that continues to use exist-
ing bus stations. For evaluation, the authors compared
the results of simulations of their and existing shuttle
systems. It was concluded that their approach per-
forms slightly better than the existing system. Nev-
ertheless, it lacks the usage of time windows, so that
arrival times cannot be predicted or guaranteed. The
authors of (Mukai and Watanabe, 2005) test different
on-demand transportation services, which they cate-
gorize in semi- and full-demand systems. The fea-
sibility and realization of a DRT service for a low-
demand density area is examined in (Li et al., 2007).
A model to investigate the financial viability of a DRT
system is presented in (Ronald et al., 2013).
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
218
3 APPROACH
We borrow the general idea from the work in (Tsub-
ouchi et al., 2010) and adapt it to our needs. At the
core, given a new request and a dynamic riding sys-
tem with a fleet of multi-passenger vehicles, it ad-
dresses two problems:
• How to choose a fitting vehicle for the new re-
quest?
• Can the request be assigned to the chosen vehi-
cle?: Does insertion of the new request into the
schedule of the chosen vehicle violate the con-
straints of already accepted requests? Can this be
overcome?
We assume that the system provides customer in-
terfaces (web-based or mobile application) which can
be used by customers to send requests. We also as-
sume that the buses are equipped with GPS devices
and mobile computers supporting wireless Internet
access for bidirectional communication with the cen-
tral system. Thus, GPS devices can report current lo-
cation data of the bus to the central system. The cen-
tral system can notify the bus about an updated sched-
ule/route, which is shown to the driver in a screen on
a map. Current state of the system is reached in two
phases:
1. Online, semi on-demand: Usage of existing sta-
tions and routing between them
2. Online, full on-demand: Arbitrary locations for
pick-up and drop-off and road based routing
3.1 Phase 1 - Online Semi On-Demand
As a starting point, the system uses existing bus sta-
tions and connections provided by a static GTFS
3
feed. During initialization, we read GTFS data from
the database and construct an in-memory graph of the
service network for routing.
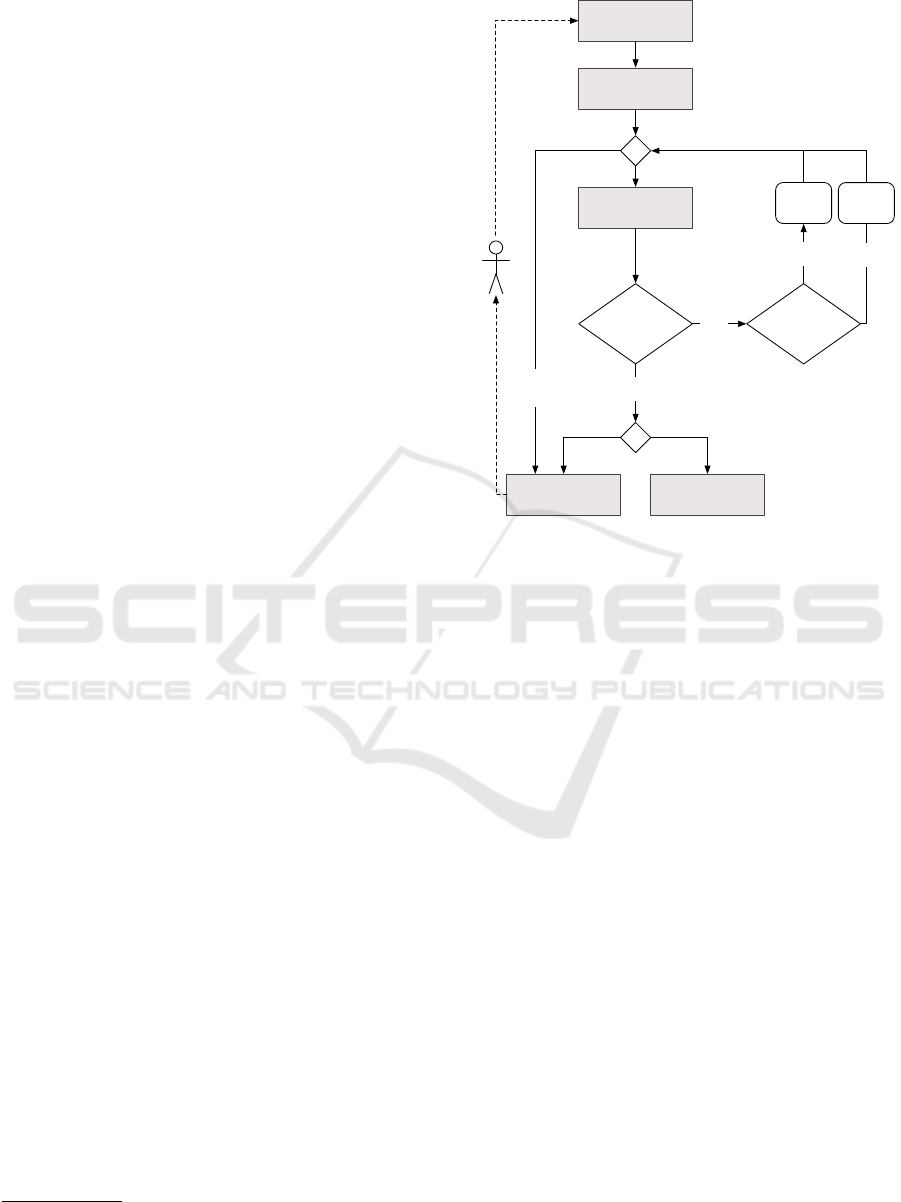
An overview of the working principle is depicted
in Figure 1. Requests are specified by number of peo-
ple, origin, destination and either pick-up or drop-off
time. Based on the origin and destination, the Request
Processor calculates the shortest path and uses its du-
ration to set the missing time parameter (pick-up or
drop-off). Then, we relax both time constraints by ap-
plying relative and absolute slack times which at the
end give us time windows for both pick-up and drop-
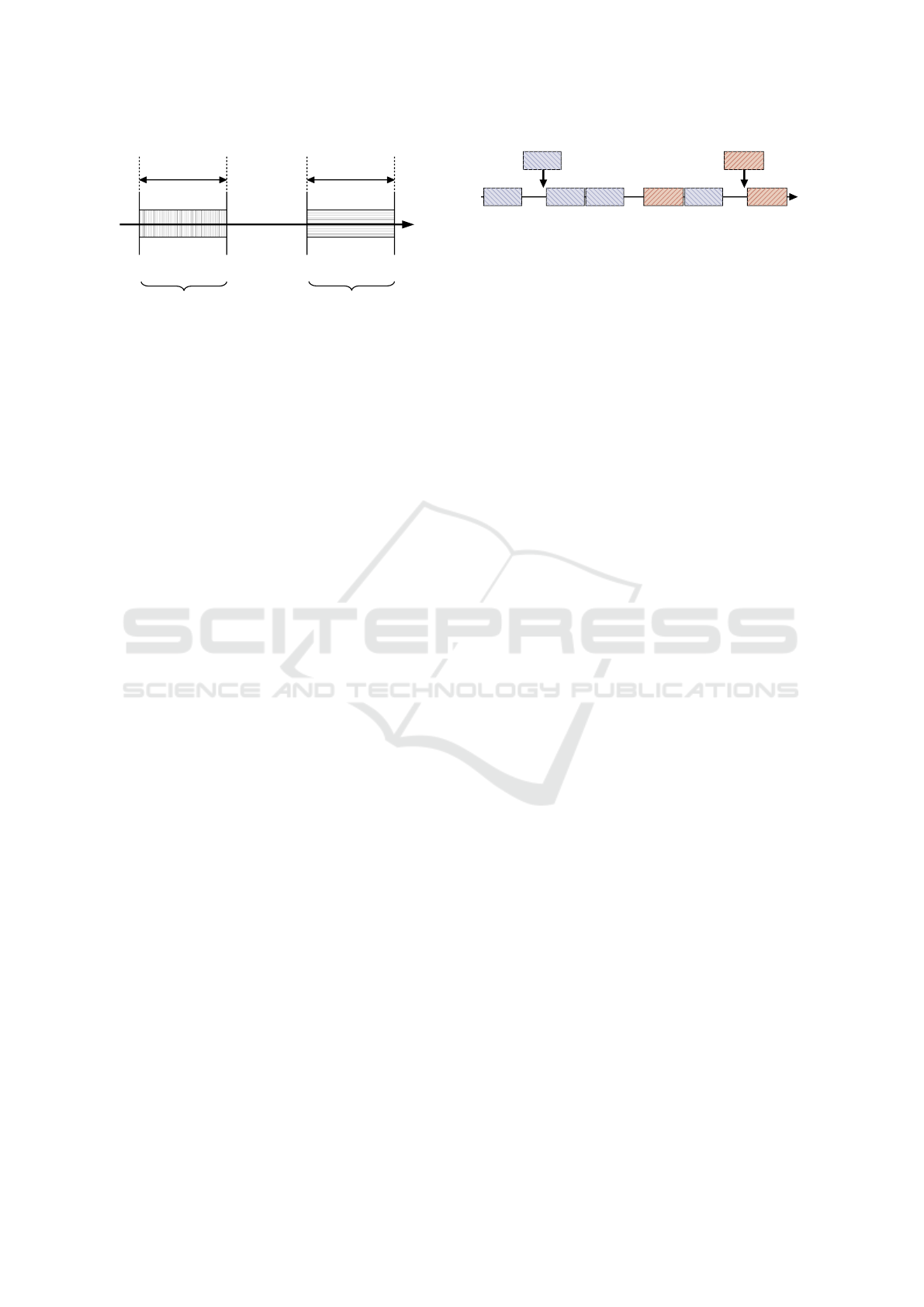
off. The concept of time window (Figure 2) is essen-
tial to increase the overall flexibility of the system.
Without it, the schedules would be too rigid since the
3
General Transit Feed Specification.
https://developers.google.com/transit/gtfs/
Scheduler / Router
Violates
constraints?
Try
again
No
Request Processor
Bus Sorter
User
Notifier
Bus / Driver
Notifier
Cannot
accept
Yes
Reached
max retries?
No
Try next
bus
Yes
Figure 1: Working principle overview.
accepted requests would not tolerate to be late or early
as a new request is inserted into the schedule. We ac-
tually model a request as containing two events (pick-
up or drop-off), each of which contains a location, an
actual time and time window.
Afterwards, the Bus Sorter takes over to sort the
buses by their fitness for the new request. Bus Sorter
employs a heuristic with a decision variable. The de-
cision variable is calculated for the new request and
each bus. Then, buses are sorted in descending order
of the decision variables. The original idea in (Tsub-
ouchi et al., 2010) describes only one heuristic: Fa-
voring of the bus that already travels along a direction
to the new request. Additional to that, we implement
multiple strategies for comparison:
1. Prefer idle buses: Distribute the requests in a way,
that the customers are transported faster at the cost
of buses being longer in operation. This heuris-
tic takes sides with the customer (Generally, the
customer and bus service operator have conflict-
ing objectives: The customer wants to travel faster
and be earlier at the destination, whereas the bus
service operator wants less buses in service in or-
der to minimize operational costs.).
2. Avoid idling of buses: Prefer buses that are al-
ready in motion/operation, even though it might
prolong the travel time of the customer. This
heuristic takes sides with the operator.
3. Distance: This heuristic considers how far the
Implementation and Evaluation of an On-Demand Bus System
219
EPT
n
LPT
n
EDT
n
LDT
n
slack time
Available range for IPT
n
Available range for IDT
n
time
slack time
Figure 2: Time windows (Tsubouchi et al., 2010). EPT
(LPT): Earliest (latest) pick-up time, EDT (LDT): Earliest
(latest) drop-off time, IPT: Informed pick-up time, IDT: In-
formed drop-off time.
bus would be from the pick-up stop at the de-
sired pick-up time of the new customer, and anal-
ogously from the drop-off stop.
4. Random: Assign random decision variables for
the sake of comparison how the bus sorting strat-
egy influences the results.
The results are presented in Section 5. The Sched-
uler iterates over the sorted bus list and executes for
each (bus, new request) pair the steps summarized as
follows:
1. Collect all events of the bus.
2. Add 2 events of the new request into collection.
3. Sort the collection of events by actual times.
4. Since the order of events might have changed,
compute new paths between events and update ac-
tual times.
5. Check feasibility of events: If there are violations,
adjust infeasible events. Afterwards, if max re-
tries is not reached, go to Step 3 and try again.
6. Check bus capacity constraint: If there is no vio-
lation, calculate new schedule and return it. Oth-
erwise, if max retries is not reached, go to Step 3
and try again.
If a schedule is returned, we stop iterating over the
remaining buses and conclude that the fitting bus is
found. Overall, the scheduling algorithm aligns with
the one described in (Tsubouchi et al., 2010), but dif-
fers in that, after sorting the events by actual times,
we calculate the paths between successive events and,
if necessary, update actual times (Step 4). This idea
can be illustrated with an example (Figure 3).
Until the insertion of PRE
5
, the route contains a
path leg PRE
1
→ PRE
2
. Since PRE
5
should be ful-
filled after PRE
1
but before PRE
2
, the vehicle has to
make a detour to pick up the passenger with request
id=5. So there are two new path legs (PRE
1
→ PRE
5
and PRE
5
→ PRE
2
) that need to be calculated and
t
PRE
1
PRE
1
PRE
2
PRE
2
PRE
3
PRE
3
DRE
2
DRE
2
PRE
4
PRE
4
DRE
1
DRE
1
PRE
5
PRE
5
DRE
5
DRE
5
Figure 3: Example for insertion of the pick-up request event
(PRE
5
) and drop-off request event (DRE
5
) for the request
id=5.
used. This can cause a delay for arrival at PRE
2
. If
this is the case, then the actual time of PRE
2
is set
to the newly calculated time (actual time of PRE
5
plus the duration of PRE
5
→ PRE
2
). But now there
might be a conflict between PRE
2
and PRE
3
, or be-
tween PRE
3
and its successor, and so on. As it turns
out, the insertion of PRE
5
can start a chain reaction of
shifting of subsequent events until reaching an event
whose actual time is not affected (i. e. there is a huge
time gap to its predecessor). The insertion of DRE
5
can cause the same effect and chain reaction.
The potential violation of constraints (e. g. ac-
tual pickup time is later than latest pickup time) are
discovered by applying the feasibility rules and are
solved subsequently (e. g. by setting actual pickup
time to latest pickup time) as described in (Tsubouchi
et al., 2010). If there are no violations for a bus, we
compute the new schedule and notify the user and the
bus driver. If we iterated over all buses but could not
find one without violations, we conclude that this re-
quest cannot be accepted.
3.2 Phase 2 - Online Full On-demand
In the second phase, the capabilities of the system
are extended by switching from using a static sta-
tion/connection network to dynamic locations (geo-
coordinates) for pick-up and drop-off. To achieve this,
we need knowledge about the map and road network,
more specifically a routing solution based on road net-
work.
Moreover, inspired by (Martinez et al., 2006) we
implement a new bus sorting strategy using fuzzy c-
means clustering. Regular k-means, given a distance
function d and a predefined number of k clusters, as-
signs each of n points to one of the k clusters. Instead
of assigning a point to one cluster, fuzzy c-means cal-
culates the membership/likelihood degree of a point
for every cluster. Since we do not choose only one bus
but rather try out all buses, membership/likelihood de-
grees of buses as fitness values allow us to stay within
our framework. This way we can sort clusters (buses)
for a point (route request). Since the already imple-
mented bus sorting strategies were quite primitive,
with this, we wanted to evaluate a more sophisticated
approach whether it would deliver better estimation
for request-bus mapping.
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
220

These extensions do not require any modification
in Figure 1, only replacing some of the lower level
components with new implementations. The main
component of the system, the scheduler, can be used
as it is. This is the case because it uses the time of
the events as the primary constraint. The space con-
straint (whether we use fixed stations or arbitrary lo-
cations) is only relevant for the underlying routing en-
gine that finds a path and its duration, which we use to
calculate/set/adjust the times of pick-up and drop-off
events.
4 IMPLEMENTATION
The system is implemented as a standalone Java ap-
plication interacting with PostgreSQL for persistence.
The implementation details specific to evaluation are
described in Section 5.
In the first phase, in which stations are used, the
GTFS data is imported into PostgreSQL once dur-
ing the development using the GTFS SQL Importer
4
.
During the initialization, the application fetches the
stations, the arrival/departure times of bus trips at
stations from the database. With this information
we build an undirected graph using JGraphT
5
. In the
graph, the stations become the nodes and we construct
an edge between two subsequent stations of the same
bus trip. As the edge weight we use the calculated
travel time from a station to the next station in the
same trip. Since we are dependent on the routing be-
tween nodes, JGraphT offers a reliable and fast A*
implementation which we utilize to calculate shortest
paths in the graph. The Bus Sorter component is im-
plemented using the strategy design pattern to make
the exchange of various heuristics easier. The Sched-
uler implementation is the direct translation of the ap-
proach presented in Section 3.1 into Java code.
In the second phase, in order to support routing
between arbitrary locations, we opt for using OTP
6
.
OTP is a Java library with an embedded server for effi-
cient pathfinding through multi-modal transportation
networks. Transportation networks are represented by
OSM
7
graph data and optionally extended by GTFS
feeds for transit routes. OTP provides a REST API
8
for programmatic integration of third-party applica-
tions. The bus system acts as a REST client, and
4
https://github.com/cbick/gtfs SQL importer
5
JGraphT is a graph library that provides graph-theory
data models and algorithms. http://jgrapht.org/
6
OpenTripPlanner. http://www.opentripplanner.org/
7
OpenStreetMap. http://www.openstreetmap.org/
8
Representational State Transfer Application Program-
ming Interface
sends routing requests to an OTP instance running lo-
cally. The REST requests specify the transportation
mode as car to trigger pathfinding using only the road
network. Fuzzy c-means implementation bases on the
one of Apache Commons Math library
9
with slight
modifications for our use case.
5 EVALUATION
In this section, we first overview our methodology and
approach how to test the system, as well as the com-
ponents that complement the core implementation to
render such an approach possible. Afterwards, we
present the evaluation results.
5.1 Phase 1 - Online Semi On-demand
The first version of the system, which uses existing
bus stations and connections, is evaluated with a sim-
ulation module, that
1. updates the position of the bus as time passes, and
2. generates new requests which are processed by
the system.
It was necessary to simulate the operation of buses
within a short period of time while the service oper-
ation covers a wider range of time. To realize this
we utilize a ticking clock, that is used throughout the
system, to add an offset to the current time when
necessary. Regarding the first point, it is checked
whether the bus has arrived at the approaching sta-
tion in schedule. If it is the case, the related entities
are updated (i. e. the schedule, paths, number of pas-
sengers). Regarding the second point, we randomly
generate requests within a bounding box on the map
(which corresponds to service coverage derived from
the GTFS data). In order to achieve a more realistic
simulation, we assign to each station a local density,
that is a function of its distance to all other stations.
It is formulated in Equation (1), where V is the set of
stations in the network and d(u, v) is the direct dis-
tance between u, v ∈ V .
density(v) =
∑
u ∈ V, u 6= v
1
(d(u, v) + 1)
2
(1)
The local density is used in Equation (2) to calcu-
late the probability ω of a station to be used as ori-
gin or destination in request generation. With this we
prevent generating excessive number of requests with
stations that in reality are used less frequently.
9
http://commons.apache.org/proper/commons-
math/userguide/ml.html
Implementation and Evaluation of an On-Demand Bus System
221

ω(v) =
density(v)
∑
u ∈ V
density(u)
(2)
The objective was to run our dynamic system and
simulate a conventional bus service (static system),
send them requests, monitor their status and compare
the results on the basis of following criteria:
Speed denotes how fast the customers arrive at
their destinations. Its value is within the inter-
val [0, 1] ⊂ R. The value of 1 represents the
fastest possible journey from origin to destination,
whereas a value of 0 represents an infinite journey
(in theory). The higher the value, the better.
Capacity Utilization: denotes the average percent-
age of occupied seats during the service time of
a bus. A lower value implies empty trips. The
higher the value, the better.
Success Rate of Requests: expresses the percentage
of accepted requests. The slack time parame-
ter has a huge effect on the success rate, since a
lower slack time infers less flexible time windows,
which influences the acceptance of new requests
negatively.
Bus Activity: denotes the average percentage of time
during which the buses are in service (motion).
Its value is within the interval [0, 1] ⊂ R. A high
value could imply acceptance of a huge num-
ber of requests, but also an inefficient utilization
of buses (i. e. assignment of a request to a sub-
optimal bus). Therefore it should only be inter-
preted within context of other criteria. Moreover,
this measure only applies to the dynamic system,
since in conventional services the buses are in mo-
tion regardless of the fact that there is demand or
not.
Simulation Configuration. The region used for the
simulation was the south-east rural area of Aachen,
Germany with 52 stations in total (Figure 4). The
simulation of the static system is configured in a way
that the bus lines as defined in GTFS are used, but
the frequency of a line has to be set. The default bus
line frequency is set to 30 minutes, which corresponds
roughly to the reality in the rural area. In the dynamic
system, the number of buses can be adjusted. More-
over, the relation between the time the request is sent
to the system and the time for requested departure is
important. Journey requests at short notice do not let
the schedule to be adjusted in a timely fashion. There-
fore, the requests must be sent at least 30 minutes and
at most 90 minutes before. In all instances, the sim-
ulation time period is 72 hours. Within this period
approx. 6480 requests are processed (2160 requests
Figure 4: Stations for GTFS in a rural area (south-east of
Aachen, Germany).
per day, 1 request every 40 seconds). Unless stated
otherwise, the absolute slack time is set to 15 minutes
and the relative slack time to 25% of the travel time. It
is also important that both static and dynamic systems
use the same bus capacity which is set to 20.
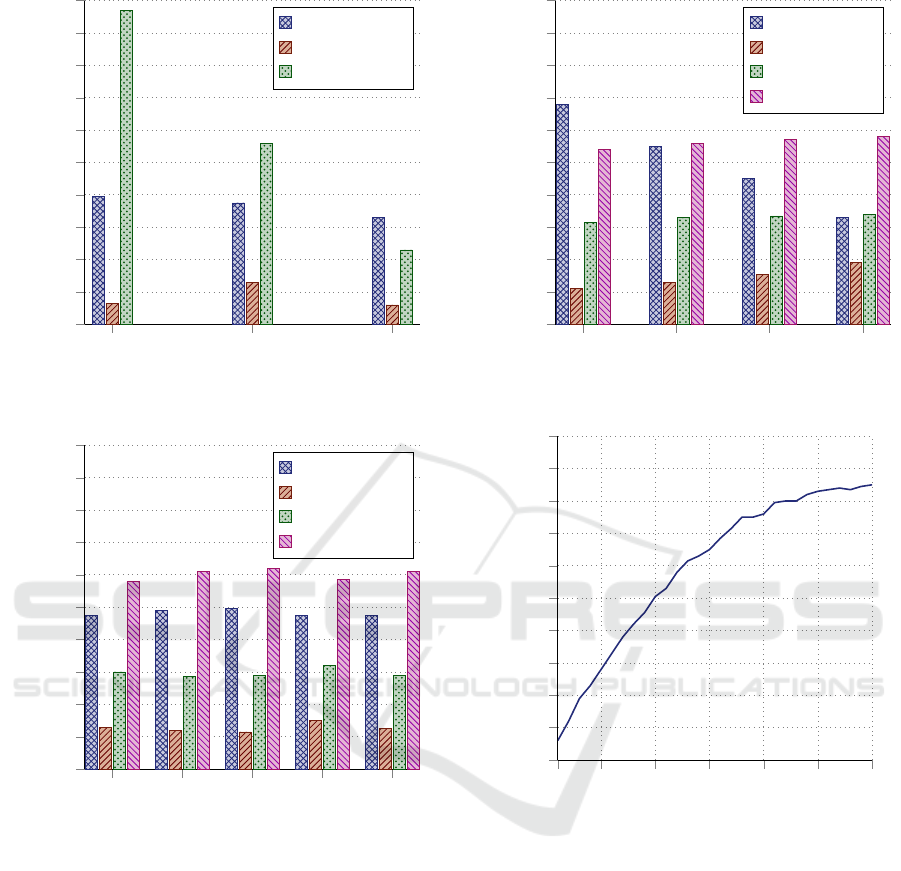
Results. Figure 5 illustrates the effect of different fre-
quencies. This test is conducted to ensure that the
simulation of the static system works as intended.
Success rate decreases as the frequency decreases
(i. e. as the interval between two bus dispatches of the
same bus line increases), which is expected since the
customers are not willing to wait for a longer time.
Figure 6 depicts the results of using different strate-
gies. Interestingly, the results are more or less the
same regardless of the chosen strategy. We argue
that this is due to the chosen, rather small region.
On larger regions this should affect the results pro-
foundly. Figure 7 illustrates the effect of the cho-
sen window size. With increasing time window the
speed decreases, which means it takes longer for the
customers to arrive at the destination, and therefore
the bus capacity utilization increases as well. Fig-
ure 8 aligns with the educated guess ”the more buses
the higher the success rate” but also hints at a satura-
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
222
10 20 30
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Score
Speed
Capacity util.
Success rate
Figure 5: Static system - Comparison of different frequen-
cies (in min).
Standard
Prefer idle
Avoid idling
Distance
Random
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Score
Speed
Capacity util.
Success rate
Bus activity
Figure 6: Dynamic system - Comparison of bus sorting
strategies using 6 buses.
tion point for the maximum number of buses needed
which would be interesting for the operator. Ta-
ble 1 provides a summary of the comparison of the
static/dynamic systems: The static system with 12
buses could only fulfill 24% of the requests, whereas
the dynamic counterpart with the same number of
buses can accept 59%. The trips take less time with a
dynamic system as well (67%). Since more requests
are accepted, the dynamic system has a higher capac-
ity utilization (15% compared to 4.5%). In the dy-
namic system, the buses are in motion/service 55% of
the time. During the remaining time they are waiting
idle to service requests. Bus activity calculation of the
static system is omitted, since they are in service all
5 10 15 30
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Score
Speed
Capacity util.
Success rate
Bus activity
Figure 7: Dynamic system - Success rate with increasing
time window (in min).
1
5
10
15
20
25
30
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Number of buses
Success rate
Figure 8: Dynamic system - Success rate with increasing
number of buses.
the time during the service operation, which could be
interpreted as 100% bus activity.
5.2 Phase 2 - Online Full On-demand
The second version of the system, now operating with
arbitrary pick-up and drop-off geocoordinates, is eval-
uated by performing quality tests that compare the
request processing of the dynamic and static system
with their results. But first, we want to demonstrate
that bus sorting with fuzzy c-means clustering can of-
fer better estimates than prior heuristics.
Bus sorting with fuzzy c-means. In order to evaluate
the clustering strategy, we constructed a test bed with
3 requests (Figure 9). The number of buses was set to
Implementation and Evaluation of an On-Demand Bus System
223
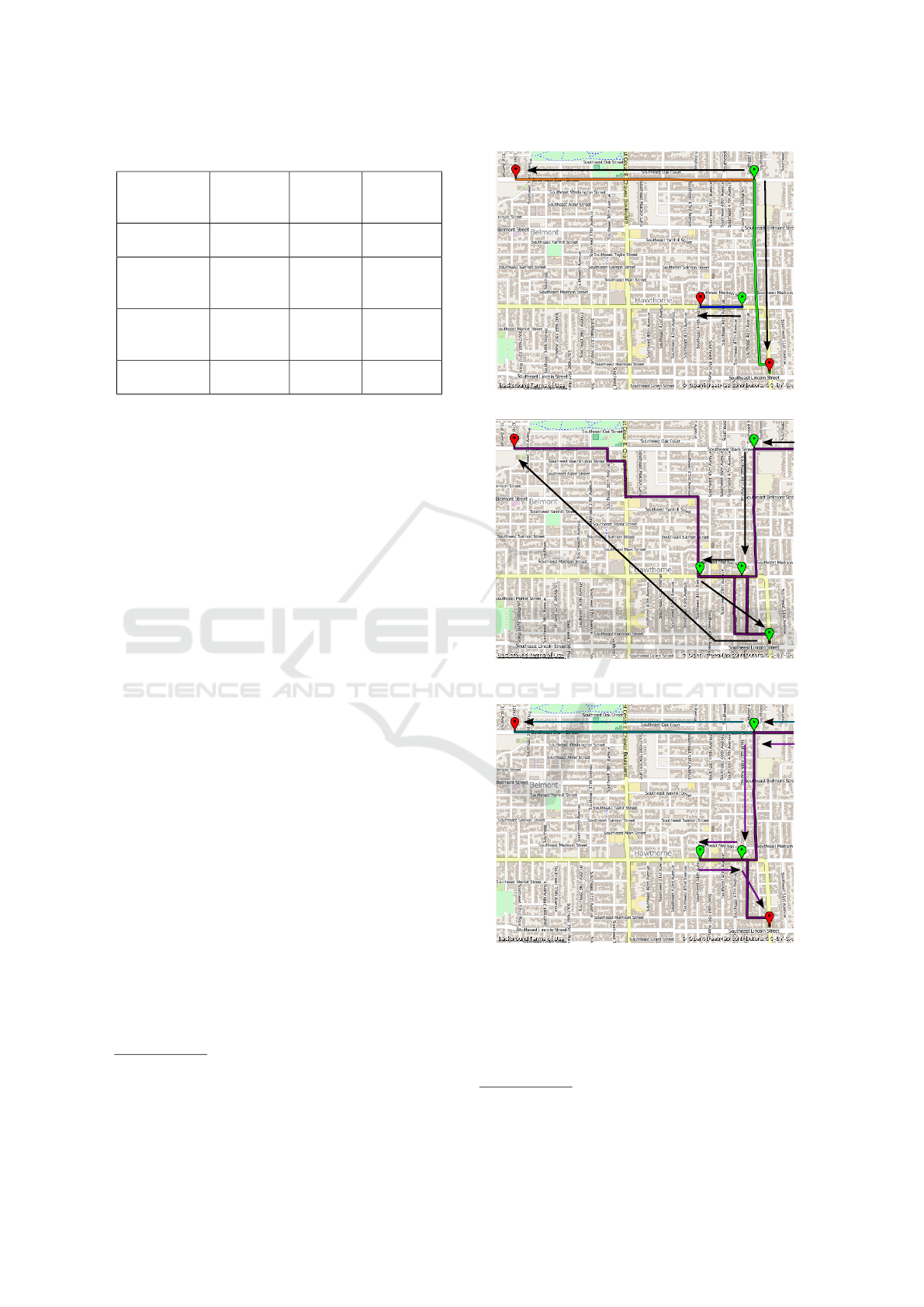
Table 1: Static/dynamic comparison overview.
Static
(12 buses)
Dynamic
(6 buses)
Dynamic
(12 buses)
Success rate
24% 33% 59%
Relative
trip duration
100% 70% 67%
Capacity
utilization
4,5% 15% 15%
Bus activity
– 59% 55%
2, so that the choice of each sorting strategy is easily
visible. Request 1 and 2, color-coded with orange and
green paths respectively, were sent first to the system,
specifying the same pick-up time. Figure 10 illus-
trates the resulting bus route of the one bus, to which
all 3 requests were assigned, using the distance strat-
egy (not tested with others since Figure 6 indicated
similar results). This is a viable but sub-optimal bus
route. It causes delays for customers and yields longer
routes for the bus in use. Figure 11 shows the result
using the clustering approach. It employs both buses
(color-coded as green and purple), but the routes of
the buses are shorter and more compact.
Quality Tests
As with the first phase of development, we construct
an environment where we run two simulations (dy-
namic and static), generate a request set, let both sys-
tems process the same requests and interpret the out-
come.
Simulation Configuration. The simulation is mod-
eled to mirror the public bus service in Ulm, Germany
operated by Stadtwerke Ulm/Neu-Ulm (SWU). Ulm
is a small to medium-sized city with a comprehensi-
ble transit service. SWU puts its GTFS feed online
which we use for our static system simulation
10
. We
import the OSM graph of Ulm and the GTFS feed of
SWU into OTP. In REST requests for the dynamic
system the mode parameter is set to car to use only
the OSM graph, and for the static counterpart it is set
to bus to make OTP use the GTFS data. According to
the SWU website, it offers a bus service including 63
buses (with an average capacity of 142), distributed
over 12 bus routes
11
. The dynamic system is config-
10
https://www.swu.de/privatkunden/swu-
nahverkehr/gtfs-daten.html
11
https://www.swu.de/privatkunden/swu-
nahverkehr/fuhrpark/busse.html
1
2
3
Figure 9: Requests.
Figure 10: Using the distance bus sorting strategy the three
requests are assigned to the same bus.
bus-1 bus-1
bus-2
bus-2
Figure 11: With fuzzy c-means bus sorting strategy the
three requests are assigned to two buses.
ured in a way to match the static system. The absolute
slack time of the dynamic system was set to 20 min-
utes, which is the average bus frequency calculated
from all bus schedules
12
. After having looked at the
12
https://www.swu.de/privatkunden/swu-
nahverkehr/fahrplan-liniennetz/linienfahrplaene.html
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
224
GTFS data, we decided to generate requests that fall
in two time periods: From 16:15 to 17:50 and from
21:15 to 22:50. During the first time period the static
bus system makes use of all available buses. Within
the second time period only 5 of 11 bus lines are ac-
tive in the static bus system. 5700 requests were gen-
erated for both time periods, which approximates one
request per second. For each time period, the start and
end locations of generated requests fall in one of the
following categories:
1. At bus stations of the same route in static system
2. At bus stations from different routes in static sys-
tem, which means that the customer of the static
system has to switch buses during her journey.
This causes longer travel times and potentially
forces customers to walk a part of their route.
3. Arbitrary locations within the operation bound-
aries independent of any bus route.
This setup presumably should yield results that are in
favor of the static system for the first category, and the
dynamic system for the third.
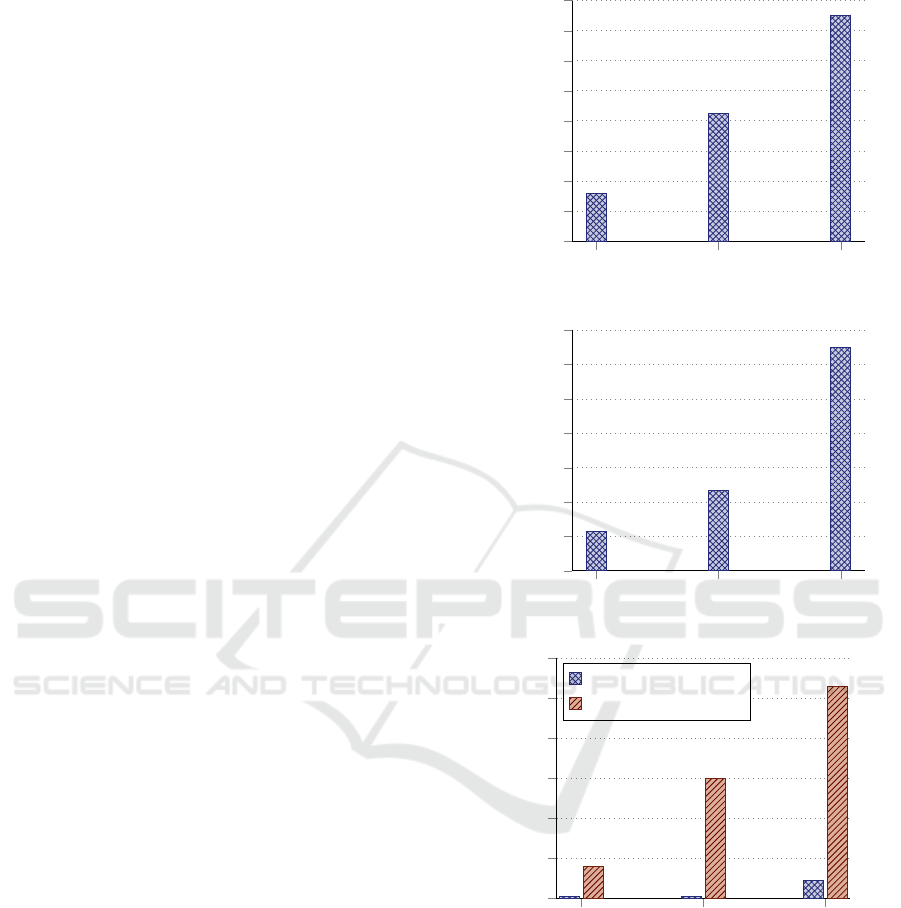
Results. For the sake of brevity we only present the
results of the time period from 16:15 to 17:50. Time
period from 21:15 to 22:50 yielded similar results.
Figure 12 shows the average amount of time the cus-
tomers save using the dynamic system instead of the
static system. In this context, the total travel time
represents the time starting from the desired pick-up
time to the actual drop-off time. This time span thus
includes possible waiting and walking times of cus-
tomers, too. It reveals the tendency of having least
saved time for requests with locations at the same
route, and most saved time for arbitrary request loca-
tions. This matches the expectations since the granted
advantage for the static system decreases with arbi-
trary locations. Moreover, in all cases the amount of
saved time is positive, which shows that customers
have shorter travel times even in scenarios that should
benefit the static bus system. Figure 13 illustrates the
average walking times in the static system since it re-
quires customers to walk to a pick-up station, or be-
tween stations (if there are switches), or from a drop-
off station to their actual destination. In the dynamic
system, there is no such condition. The fact, that the
customers have to walk more for arbitrary locations,
correlates with the expectations. Figure 14 compares
the number of rejections in both systems. The low
number of rejections in the dynamic system can be
explained by having this many buses (63). It almost
always finds a fitting bus. While the dynamic sys-
tem can by nature reject requests, the rejection for the
static bus system had to be simulated. Therefore, it
was assumed that customers would not wait longer or
Route
Stop Boundary
0
200
400
600
800
1,000
1,200
1,400
1,600
Average saved time (in s)
Figure 12: Average saved travel time.
Route
Stop Boundary
0
200
400
600
800
1,000
1,200
1,400
Average walking time (in s)
Figure 13: Average walking time for static system.
Route
Stop Boundary
0
20
40
60
80
100
120
1 1
9
16
60
106
Number of rejected requests
On-demand system
Static system
Figure 14: Comparison of rejections.
arrive later than the slack time of the dynamic sys-
tem (20 minutes – average bus frequency). After hav-
ing evaluated both systems using the same configura-
tion, we wanted to see how much we can scale down
the dynamic system while it still performs at least as
good as the static one. Figure 15 depicts the relation
between the number of buses and the number of re-
jections. So, while the static system has 106 rejec-
tions with 63 buses, the dynamic system can match
the same success rate with 16 buses (107 rejections).
This is valuable for the service provider to cut down
Implementation and Evaluation of an On-Demand Bus System
225
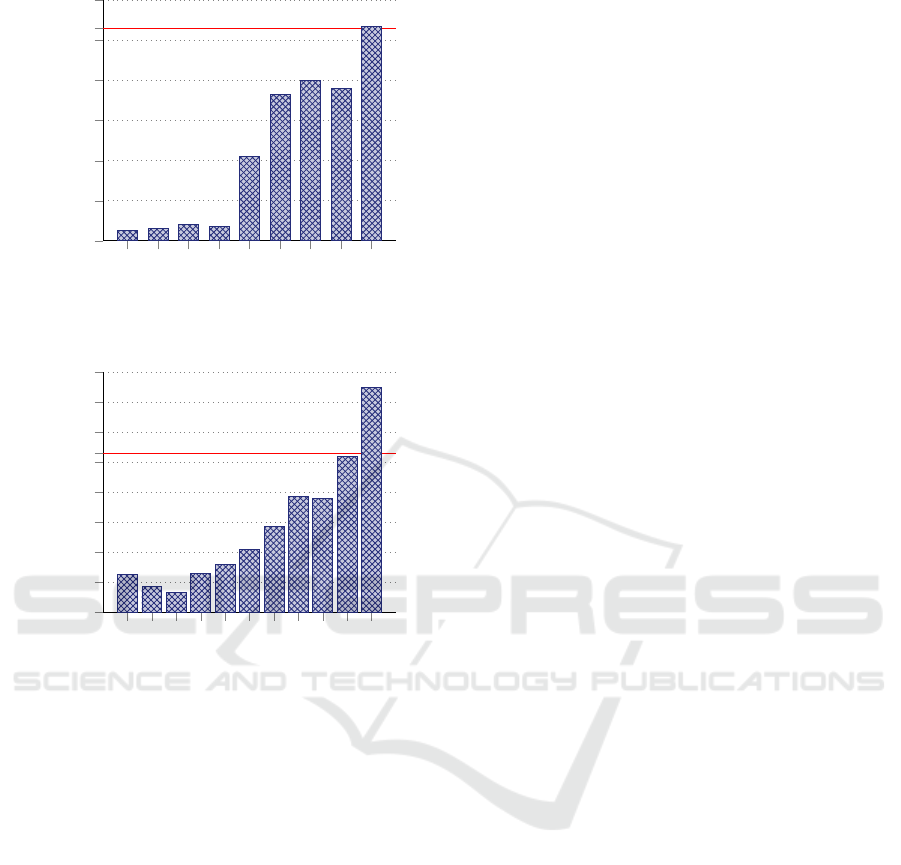
60 50 40 30 20 19 18 17 16
0
20
40
60
80
100
120
Number of buses
Number of rejected requests
Figure 15: Optimal number of buses. The horizontal line
represents 106 rejections of the static system with 63 buses.
20 19 18 17 16 15 14 13 12 11 10
0
20
40
60
80
100
120
140
160
Slack time (in min)
Number of rejected requests
Figure 16: Optimal slack time for 30 buses. The horizontal
line represents 106 rejections of the static system with 63
buses.
operational costs. Next, we wanted to see how much
we can reduce the slack time. A broader slack time
provides the needed flexibility to our dynamic sys-
tem, but is inconvenient for the customer. Figure 16
shows that we can reduce the slack time to 11 min-
utes with 30 buses and match the success rate of the
static system (63 buses with 20 minutes average bus
frequency).
6 CONCLUSION
In this work, we implemented and evaluated an online
full on-demand bus system in two phases. We started
with a preliminary version that routes freely from sta-
tion to station, but visits only the stations where cus-
tomers are to be picked up or dropped off. This al-
lowed us to evaluate the feasibility of an on-demand
system before advancing the approach. We evaluated
it in comparison with a traditional bus service simu-
lation using a rural area (south-east of Aachen, Ger-
many), where the quality of bus services usually suf-
fer from low density of bus stations and low bus fre-
quencies. The comparison was done on the basis of
efficiency criteria such as speed, capacity utilization,
success rate and bus activity. The evaluation showed
that the dynamic system can deliver better results with
the same (or less) number of buses as in the static sys-
tem.
In the second phase, we extended the system to
route between arbitrary locations and replaced the
bus sorting strategy with a more sophisticated one.
The tests showed that the new bus sorting approach
yielded a better order of buses for the to-be-processed
request. Furthermore, comparisons were performed
with the static counterpart by running simulations
within an urban region (as opposed to a rural area
of the first phase), namely the transit service area of
Ulm, Germany. These demonstrated clear advantages
in terms of saved travel time, non-existing walking
time and number of accepted requests when using the
same configuration as in the static system. We also
determined that the dynamic system requires less re-
sources in order to provide the same quality of service
of the static system.
Future Work
This work presented the basic approach, implemen-
tation and evaluation. It serves as a basis for further
experimentation and improvements.
The evaluation methodology takes priority in the
list of planned improvements. Even though the com-
parison of a new solution (on-demand bus system) to
an existing solution (traditional bus service) is valu-
able, its realization is crucial for the end result. In
particular, we need better insight and more statisti-
cal data about the bus service or the usage/travel pat-
terns of customers for the evaluated area. Simulat-
ing a traditional static bus system or generating cus-
tomer requests might not represent the reality. In or-
der to improve request generation we plan to utilize
agent-based modeling. We also would like to conduct
field tests in order to evaluate the system, but also to
validate the simulation results. Another aspect, the
request-processing performance of the system, is not
considered so far and is part of the future work.
Then there are features that we want to imple-
ment to enhance the capabilities of the system. In the
current implementation, the bus picks up and drops
off customers precisely at the given locations with no
flexibility in this regard. But in a real setting, these
locations might be very close to each other and still
force the bus to stop for every single customer which
VEHITS 2017 - 3rd International Conference on Vehicle Technology and Intelligent Transport Systems
226

would not be desirable due to caused traffic conges-
tion or bad user experience of customers within the
bus. To overcome this, assembly points could be
derived, where customers close to each other (e. g.
within a radius) can meet before the bus picks them
up, or multiple customers can be dropped off at the
same location if their desired locations are close to
each other. This brings us to the next feature of in-
corporating user preferences. The radius for assem-
bly points can be set system-wide and identical for
every customer, which would not be desirable. In
the same light, the slack time for the requests is cur-
rently set system-wide and identical for every cus-
tomer. Customers should be able to provide their own
preferences, which are used in the request processing
pipeline. This is also part of future work.
ACKNOWLEDGMENTS
This work was partially funded by German Federal
Ministry of Economic Affairs and Energy (BMWi)
for the project Mobility Broker (01ME12136) as well
as for the project Digitalisierte Mobilit
¨
at – Die Offene
Mobilit
¨
atsplattform (DiMo-OMP).
REFERENCES
Amoroso, S., Migliore, M., Catalano, M., and Galatioto,
F. (2010). A demand-based methodology for planning
the bus network of a small or medium town. European
Transport / Trasporti Europei, 44:41–56.
Beutel, M. C., G
¨
okay, S., Kluth, W., Krempels, K.-H.,
Ohler, F., Samsel, C., Terwelp, C., and Wiederhold,
M. (2016). Information Integration for Advanced
Travel Information Systems. Journal of Traffic and
Transportation Engineering, 4:177–185.
Beutel, M. C., G
¨
okay, S., Kluth, W., Krempels, K.-H., Sam-
sel, C., and Terwelp, C. (2014). Product oriented in-
tegration of heterogeneous mobility services. In 17th
International IEEE Conference on Intelligent Trans-
portation Systems (ITSC), pages 1529–1534.
Cordeau, J.-F. and Laporte, G. (2007). The dial-a-ride prob-
lem: models and algorithms. Annals of Operations
Research, 153(1):29–46.
Crainic, T. G., Errico, F., Malucelli, F., and Nonato, M.
(2010). Designing the master schedule for demand-
adaptive transit systems. Annals of Operations Re-
search, 194(1):151–166.
Desaulniers, G., Desrosiers, J., Erdmann, A., Solomon,
M. M., and Soumis, F. (2001). The Vehicle Routing
Problem. In Toth, P. and Vigo, D., editors, The Ve-
hicle Routing Problem, chapter VRP with Pickup and
Delivery, pages 225–242. Society for Industrial and
Applied Mathematics, Philadelphia, PA, USA.
El-Sherbeny, N. A. (2010). Vehicle routing with time win-
dows: An overview of exact, heuristic and metaheuris-
tic methods. Journal of King Saud University - Sci-
ence, 22(3):123–131.
Gørtz, I. L. (2006). Hardness of preemptive finite capac-
ity dial-a-ride. In in Computer Science, L. N., edi-
tor, Proceedings of 9th International Workshop on Ap-
proximation Algorithms for Combinatorial Optimiza-
tion Problems (APPROX 2006).
Kluth, W., Beutel, M. C., G
¨
okay, S., Krempels, K.-H., Sam-
sel, C., and Terwelp, C. (2015). IXSI - Interface for
X-Sharing Information. In 11th International Confer-
ence on Web Information Systems and Technologies.
Li, Y., Wang, J., Chen, J., and Cassidy, M. J. (2007). De-
sign of a demand-responsive transit system. Califor-
nia PATH Program, Institute of Transportation Stud-
ies, University of California at Berkeley.
Martinez, M. V., Simari, G. I., Castillo, C. D., and Peer,
N. J. (2006). A GPS-Based On-Demand Shuttle Bus
System. Technical report, Department of Computer
Science, University of Maryland College Park.
Mukai, N. and Watanabe, T. (2005). Dynamic Transport
Services Using Flexible Positioning of Bus Stations.
Autonomous Decentralized Systems, pages 259–266.
Ronald, N., Thompson, R., Haasz, J., and Winter, S. (2013).
Determining the viability of a demand-responsive
transport system under varying demand scenarios. In
Proceedings of the Sixth ACM SIGSPATIAL Inter-
national Workshop on Computational Transportation
Science, IWCTS ’13, pages 7:7–7:12, New York, NY,
USA. ACM.
Savelsbergh, M. W. P. and Sol, M. (1995). The General
Pickup and Delivery Problem. Transportation Sci-
ence, 29:17–29.
Tsubouchi, K., Yamato, H., and Hiekata, K. (2010). Inno-
vative on-demand bus system in Japan. IET Intelligent
Transport Systems, 4(4):270–279.
Implementation and Evaluation of an On-Demand Bus System
227
