Interesting Regression- and Model Trees Through Variable Restrictions
Rikard K
¨
onig
1
, Ulf Johansson
1
, Ann Lindqvist
2
and Peter Brattberg
1
1
Department of Information Technology, University of Bor
˚
as, SE-501 90, Bor
˚
as, Sweden
2
Operational data and analysis, REIO, Scania CV AB, SE-151 87, S
¨
odert
¨
alje, Sweden
Keywords:
Predictive Modeling, Model Trees, Interestingness, Regression, Vehicle Modeling, Golf.
Abstract:
The overall purpose of this paper is to suggest a new technique for creating interesting regression- and model
trees. Interesting models are here defined as models that fulfill some domain dependent restriction of how
variables can be used in the models. The suggested technique, named ReReM, is an extension of M5 which
can enforce variable constraints while creating regression and model trees. To evaluate ReReM, two case
studies were conducted where the first concerned modeling of golf player skill, and the second modeling of
fuel consumption in trucks. Both case studies had variable constraints, defined by domain experts, that should
be fulfilled for models to be deemed interesting. When used for modeling golf player skill, ReReM created
regression trees that were slightly less accurate than M5s regression trees. However, the models created with
ReReM were deemed to be interesting by a golf teaching professional while the M5 models were not. In the
second case study, ReReM was evaluated against M5s model trees and a semi-automated approach often used
in the automotive industry. Here, experiments showed that ReReM could achieve a predictive performance
comparable to M5 and clearly better than a semi-automated approach, while fulfilling the constraints regarding
interesting models.
1 INTRODUCTION
Freitas (2002) argues that three general properties
should be fulfilled by a predictive model; i.e., it
should be accurate, comprehensible, and interesting.
Accuracy is defined by some score function that de-
scribes how well the model solves the predictive prob-
lem. For regression tasks, typical score functions in-
clude mean absolute error (MAE), mean root square
error (RMSE) and the Pearson Correlation (r). Com-
prehensibility is a subjective quality which entails that
the reason behind a prediction must be understand-
able. Factors, such as which and how many functions
are used, the number of parameters the model con-
tains, and even the structure, will affect how a model
is perceived.
The last property, interestingness, is another very
subjective quality which can be hard to achieve. Nor-
mally, simple and rather vague qualities, e.g., that the
discovered knowledge should capture unknown rela-
tionships in the data or fulfill some user-defined con-
straints, are used to evaluate whether a model is in-
teresting or not. Freitas (2002) also points out that
even if interestingness obviously is a very important
property, very few techniques are designed to find in-
teresting knowledge. Instead accuracy or comprehen-
sibility is normally the focus of studies related to pre-
dictive modeling. This is a problem since the hypoth-
esis that best fit the data is not necessarily the one
that is most interesting. Dietterich (1996) notes that
if an algorithm searches a very large hypothesis space
and outputs a single hypothesis, then in the absence
of huge amounts of training data, the algorithm will
need to make many more or less arbitrary decisions,
decisions which might be different if the training set
were only slightly modified. This is called informa-
tional instability; i.e., instability caused by the lack of
information. Thus many machine learning techniques
find solutions which are precise but not interesting,
according to experts; see e.g., (Grbczewski and Duch,
2002)
When performing data analysis for engineering
applications, it is vital that both models and results
can be explained in terms that make sense for the en-
gineer. If this is not the case, the results from the anal-
ysis are normally not interesting or actionable. Tra-
ditionally, most analysis has been done using tech-
niques and methods from the field of statics. Most of-
ten, a hypothesis based on domain knowledge is ver-
ified and refined using statistical tests and methods.
König, R., Johansson, U., Lindqvist, A. and Brattberg, P..
Interesting Regression- and Model Trees Through Variable Restrictions.
In Proceedings of the 7th International Joint Conference on Knowledge Discovery, Knowledge Engineering and Knowledge Management (IC3K 2015) - Volume 1: KDIR, pages 281-292
ISBN: 978-989-758-158-8
Copyright
c
2015 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
281
Since the hypotheses are based mainly on engineer-
ing domain knowledge, they immediately make sense
to the engineers. At the same time, these methods
are restricted to the imagination of the engineer, since
they rely on his or her knowledge.
The purpose of this paper is to demonstrate
a straightforward technique for creating interesting
regression- and model trees by including user con-
straints related to how variables may be used. The
main idea is to combine a data driven approach and
the typical engineering approach where predefined
hypotheses are tested and refined. More specifically,
Quinlan (1992)s M5 algorithm is extended to enforce
problem constraints when building regression- and
model trees. A positive side effect is that the search
space is reduced, which should increase the possibil-
ity of finding an both accurate an interesting model.
The usefulness and generality of the suggested tech-
nique is demonstrated in two very different real-world
case studies, modeling of golf player skill and model-
ing of driver influence on fuel consumption of trucks.
2 RELATED WORK
Decision trees are arguably the most popular pre-
dictive technique producing comprehensible models.
Furthermore, for regression problems, which is the fo-
cus of this study, the M5 algorithm, first presented in
Quinlan (1992), is one of the most powerful and flex-
ible. Since M5 is also the basis for the new technique
suggested in this study, it is presented in more detail
below. The following subsection then presents related
work regarding the creation of interesting predictive
models.
2.1 Decision Trees
Quinlans M5, first presented in (Quinlan, 1992), is a
decision tree inducer used to create comprehensible
models in the form of regression trees or model trees.
Regression trees are trees with numeric constant in
the leaves, while model trees use linear regression.
Regression trees are easy to generate and interpret,
but normally not very accurate. Hence, Quinlan sug-
gested the use of model trees. M5 model trees is a a
piecewise linear regression, created by selecting each
split in a way that minimizes the standard deviation of
the subtrees. When the tree is fully grown, linear re-
gressions are created using standard regression tech-
niques for each node in the tree. Next, each model is
simplified by considering the estimated error at each
node. If a model consisting of a subset of the param-
eters used in the original model has a lower estimated
error according to equation 1, (where n is the num-
ber of instances reaching that leaf and v is the number
of parameters of the model), it replaces the original
model.
e = e ∗ (n + v)/(n − v) (1)
Finally, each non-terminal node is compared to its
subtrees in the same way. If the estimated error of
the node is lower than its subtree, the subtree is re-
placed by the model. Model trees are in general
both more accurate and more compact than regres-
sion trees. Another notable difference is that model
trees can extrapolate outside the range of the train-
ing instances. Nevertheless, regression trees are also
supported in M5, since they are in general deemed to
be more comprehensible. When creating regression
trees a single constant, i.e., the average value of all
training instances reaching a leaf, is chosen instead of
a linear regression. Even if a regression trees often
need many leaves to be accurate, and hence may look
complex, they are most often only complex when the
whole tree is considered. However, for a single leaf
only the splits leading to that leaf need to be consid-
ered. Since the number of leaves grows exponentially,
with the depth of a the tree the number of splits that
must be checked are normally quite manageable.
2.1.1 Creating Interesting Models
One basic assumption regarding interesting trees is
that they must be accurate enough while still being
comprehensible. Hence, much work has been focused
on creating constrained decision trees, i.e., trees that
are constrained according to some criterion, most of-
ten accuracy or complexity. Garofalakis et al. (2003)
for example, proposes a technique where the user may
specify either a minimum accuracy or a maximum
complexity while optimizing the other criteria, e.g. if
a maximum complexity is set, the tree with the high-
est accuracy with sufficiently low complexity is re-
turned. In this way, it is ensured that the trees are
both easy to understand and have a good accuracy.
The same approach is taken by Struyf and Dzeroski
(2006) with the difference that a large tree is first built,
before it is pruned until it fulfils the complexity con-
straint set by the user. Nijssen and Fromont (2010)
explores a technique for constraining trees using item
set lattices. Here, decision trees are again constrained
with regards to accuracy and complexity, but other
constraints related to the creation of the tree are also
explored, e.g., minimum number of samples in a leaf,
classification cost, and enforcing a significant major-
ity in the leaves.
When interestingness of trees are evaluated, corre-
lation with existing domain knowledge or constraints
KDIR 2015 - 7th International Conference on Knowledge Discovery and Information Retrieval
282
are often evaluated. Hence, to create more interesting
models, many techniques include knowledge in the
form of costs, thus becoming cost-sensitive to errors
or the acquiring of a variable value. 50 such algo-
rithms are described in (Lomax and Vadera, 2013).
Another approach is to use some knowledge about
the importance of a variable when used for prediction,
and include it in training of the model, see e.g., (Iqbal
et al., 2012) for a decision tree technique or (Iqbal,
2011) for a neural network technique. Yet another ap-
proach, presented in (N
´
u
˜
nez, 1991) uses information
about hierarchies related to the attributes in combi-
nation with attribute cost to reduce the classification
costs and increase the generalization of the produced
decision trees.
What all these techniques have in common is that
they report enhanced results when domain knowledge
is somehow incorporated in predictive models. This
is of course an encouraging but expected result, since
domain knowledge, in whatever form, typically adds
valuable information not present in the data. An-
other thing these techniques have in common is that
they are in general advanced in the form of domain
knowledge they work with, e.g., feature importance,
attribute hierarchies or attribute costs. In many cases
this type of information does not exist but there is
still some kind of simple domain knowledge, like re-
striction of the relation between variables, that can be
used. Hence, we argue for a more straightforward ap-
proach for these situations.
None of the techniques for creating constrained
decision trees or for including domain knowledge
mentioned above, fulfill the criteria set for interest-
ing trees in this study. Hence, this paper does not aim
to make a quantitative comparison against these tech-
nique but to suggest and demonstrate the usefulness
of the novel technique, presented in 4.1. However,
some kind of benchmark is of course needed, so the
proposed technique is evaluated against a straightfor-
ward approach based on standard decision trees.
3 BACKGROUND
The following sections describe the two problem do-
mains, i.e., creating interesting models for predicting
golf player skill and the driver’s influence on fuel con-
sumption in trucks.
3.1 Modeling Golf Player Skill
The first case study in this paper explores the possi-
bility to create interesting predictive models of golf
swings. The idea is to help players determine which
aspect of their swing they need to improve. For a pre-
dictive model to be interesting in this scenario it must
be comprehensible and actionable for the player or
at least for a teaching professional. It would for ex-
ample not be very helpful to tell a golfer that he hits
the ball with too much hook or slice (curving the ball
to the left or to the right) and that he should hit the
ball straighter. An interesting model should instead
mainly be expressed in terms of characteristics of the
swing itself.
Golf has a handicap system which is intended to
let players of different skill levels play against each
other on equal terms. Hence, a golfer’s handicap
(Hcp) is an estimation of the player’s skill. The way
a handicap is calculated differs slightly between USA
and Europe, but simply put it is the number of strokes
a player may deduct from his total number of strokes
after 18 holes. If a player finishes a round with less
strokes than what is intended for his Hcp, the Hcp is
lowered a fraction and if the score is higher the Hcp
is increased. Hence, Hcp is a measure of the over-
all skill of a player, i.e. including putting, short-game
and the long-game.
Since the golf swing itself consists of a very com-
plex chain of movements and the club head moves at
great speeds, it is very hard to evaluate a golf swing
just by manual observation. Naturally many previous
studies have been conducted with the aim of analysing
the swing quantitatively using high speed video, e.g.,
see (Fradkin et al., 2004) or (Sweeney et al., 2013).
Due to tedious manual labor related to video analysis,
these and similar studies only use a relatively small
number of players.
However, lately new technology like the Track-
Man Launch Monitor Radar (TM) (Trackman, 2015)
has made it possible to measure numerous character-
istics of golf swings quantitatively. TM units use a
Doppler radar to register information about the club
head at the point of impact (POI) and the trajectory of
the ball. In total TM returns 27 metrics, described in
section 3.1.1, where seven are related to the club head
and 20 related to the ball flight.
In (Betzler et al., 2012) 10 shots from each of
285 players were recorded using TM and five 1000Hz
high speed cameras. Here, the aim was to evaluate
the variability in club head presentation at impact and
the resulting ball impact location on the club face,
for a range of golfers with different Hcp. Statistical
test showed that overall, players with lower Hcp, i.e.,
players with Hcp <= 11.4, exhibited significant less
variation in all of the evaluated variables. This study
and the other two using high speed cameras, men-
tioned above, have been restricted to analysis of single
variables independently using statistical techniques.
Interesting Regression- and Model Trees Through Variable Restrictions
283
An alternative approach, explored in this study, is
to gather swing data from a large set of golfers and
then model their skill, using regression trees, based
on that data. If the model is sufficiently accurate
and comprehensible, it could then be used to explain
the difference in skill based on swing characteristics.
More technically, we try to model golf player skill us-
ing data collected with a TM unit, using player handi-
caps as the target. An interesting model is here de-
fined as a model that explains the skill of a player
based mainly on swing related variables.
3.1.1 Data
In this study a total 277 golf players with Hcp ranging
from +4 to 36, with an average Hcp of 12.8, were
recorded using TM.
To collect data from a player the radar was posi-
tioned three meters behind and slightly to right of the
player. Next, the radar was aimed (using the Track-
man Performance Studio software) at a flag approxi-
mately 250m away. Before recording a player he was
first allowed to hit some warm up shots. Next, five
consecutive strokes was recorded using the player’s
own 7-iron. The players were told to hit the balls in
the direction of the flag using a normal full stroke,
but disregarding any wind present. The wind was in-
stead handled by using TM’s built in normalization
functionality. When normalizing ball data, TrackMan
utilizes information from the club head at impact to
correct deviations caused not only by the wind, but
also from temperature, altitude and ball type. The TM
metrics recorded used in this study are presented be-
low. For more detailed explanations see (Trackman,
2015):
The variables related to the club head are:
• ClubSpeed - Speed of the club head instant prior
to impact.
• AttackAngle - Vertical movement of the club
through impact.
• ClubPath - Horizontal movement of the club
through impact.
• SwingPlane - Bottom half of the swing plane rel-
ative to ground.
• SwingDirection - Bottom half of the swing plane
relative to target line.
• DynLoft - Orientation of club face, relative to the
plumb line, at POI.
• FaceAngle - Orientation of club face, relative to
target line, at POI.
• FaceToPath - Orientation of club face, relative to
club path, at POI. (+) = open path, (-) = closed
path.
The variables related to the ball flight are:
• BallSpeed,BallSpeedC - Ball speed instant after
impact, speed at landing.
• SmashFactor - Ball speed / club head speed at in-
stant after POI.
• LaunchAngle - Launch angle, relative horizon,
immediately after impact.
• LaunchDirection - Starting direction, relative to
target line, of ball immediately after impact. (+) =
right, (-) = left.
• SpinRate - Ball rotation per minute instant after
impact.
• SpinAxis - Tilt of spin axis. (+) = fade / slice, (-)
= draw / hook.
• VertAngleC - Ball landing angle, relative to
ground at zero elevation.
• Height, DistHeight, SideHeight - Maximum
height of shot at apex, distance to apex, apex dis-
tance from target line.
• LengthC, LengthT - Length of shot, C = calcu-
lated carry at zero elevation, T = calculated total
including bounce and roll at zero elevation.
• SideC, SideT - Distance from target line, C = at
landing, T = calculated total including bounce and
roll. (+) = right, (-) = left.
To get one comprehensive value for each met-
ric, the median stroke (based on LengthC), was used.
Median values are preferred, as argued by (Broadie,
2008), since they disregard potentially really poor
shots which otherwise could lead to misleading aver-
ages. Furthermore, using a single swing also ensures
that all recorded values relate to each other.
Since previous work like (Betzler et al., 2012) has
shown that better players are more consistent, stan-
dard deviations (based on all 5 strokes) of each of the
27 metrics were also calculated and included as vari-
ables.
An important issue is how to best represent each
metric for predictive modeling techniques. Most met-
rics, like Carry Length, has a straightforward repre-
sentation, but metrics related to angles need some ex-
tra consideration. Face Angle is one example where
the chosen representation is very important, since the
angle can be both positive and negative, i.e. represent-
ing the face pointing to the right or left of the target
line. If no transformation is used, a big negative angle
would be considered as smaller than a small positive
angle. However, in relation to the target line, which is
more relevant for the quality of a swing, the opposite
is true. Hence, metrics related to the target line were
replaced with two new variables where the first was
the absolute values and the second was a binary vari-
able representing if the original angle was positive or
not. Metrics related to vertical angles, i.e., Attack An-
KDIR 2015 - 7th International Conference on Knowledge Discovery and Information Retrieval
284
gle, Launch Angle, were not modified. Finally, since
Hcp is designed to be an estimation of a player’s skill
it was selected as the dependent variable.
3.2 Modeling Fuel Consumption
The second case study models fuel consumption in
trucks manufactured by Scania. A unique modular
system is one of the most important success factors
for Scania. Modularization means that the interfaces
between component series are standardized to ensure
that they fit together in many different combinations.
The overall purpose of the modular system is to en-
sure that customers get a highly optimized product,
still built from standardized parts, thus offering cus-
tomers tailor-made vehicles, while lowering produc-
tion costs for Scania. This highly flexible system, on
the other hand, implies that almost every vehicle is
unique in its combination of different modules. In
fact, it is often said that Scania has an average pro-
duction series of 1.2 similar trucks. Obviously, this is
a great challenge when developing methods for anal-
ysis of operational and diagnostic vehicle data. Fur-
thermore, heavy commercial vehicles also have very
diversified transport assignments, compared to cars
used for private transportation. The transport assign-
ments of Scania trucks range from light operations
such as the distribution of flowers in the Netherlands,
to heavy operations like transporting 100 ton of stone
from mines on muddy jungle tracks in Africa. Natu-
rally, such diversified usage further complicates oper-
ational analysis.
In many scenarios, like when modeling the drivers
influence on fuel consumption, the way variables are
combined is very important for how interesting a
model becomes. First, variables related to the driver
must be included in the model. However due to the
very heterogeneous vehicle fleet neither the config-
uration of the trucks nor the transport assignment
can be disregarded. Obviously, different types of
trucks have different fuel consumption patterns and
driver actions that is normal for the specific task,
e.g., while making many stops and idling in heavy
city traffic may be normal behavior, it would be very
strange when performing long haulage with heavy
loads. Hence, an interesting model should be able to
discern the drivers effect on fuel consumption from
the configuration and assignment. A pure data driven
approach would most likely result in a model con-
sisting of a jumble of assignment, configuration and
driver related variables, thus hampering the compre-
hensibility and making analysis extremely cumber-
some, or even impossible.
One frequently applied straightforward approach
to this problem, and for increasing accuracy, is to
manually divide the fleet into subsets of more simi-
lar vehicles, based on for example their transport as-
signments. Next, a variable selection is performed
for each subset which is then modeled using some
multiple linear regression based technique. The main
idea behind this semi-automatic approach, hence-
forth called subset modeling, is that similar instances
should, at least in theory, require fewer regressors and
be modeled more easily, thus resulting in more com-
prehensible and more accurate models. Subset mod-
eling is normally based on domain knowledge, conse-
quently requiring a substantial amount of manual la-
bor if more than a few subsets are to be formed. Still,
it is not sure that the groups formed by the engineers
using their domain knowledge, is the best basis for the
following analysis.
3.2.1 Data
The vehicles that Scania produces contain advanced
networks of different embedded computers called
Electronic Control Units (ECU:s). Data is aggre-
gated over the entire lifetime of an ECU and is up-
loaded to Scania during workshop visits and stored
in a database. The operational data is then combined
with information about the modular system and other
data sources in a data warehouse.
The data set used in the experiments include data
from 33196 vehicles consisting of 43 variables based
on the second to last and the last readouts. The depen-
dent variable was the average fuel consumption be-
tween these readouts and the 43 independent variables
(a small subset of what was available) were calculated
in a similar manner. Only a few of the actual variables
are presented with real names, due to company policy,
but they can however be divided into three subgroups:
Configuration. Variables related to the configuration
of the truck, e.g., number of axles, engine size,
height, length etc.
Assignment. Variables related to the transport as-
signment, e.g. cargo weight, number of stops, dis-
tance, average inclination etc.
Driver. Variables influenced by the driver, e.g., aver-
age speed, braking, use of cruise control, idling
etc.
More specifically the data set consisted of:
The aim of this case study is to create a better de-
cision support for truck driver coaching. To do this
the engineers at Scania wanted to be able to explain
the fuel consumption of a truck based on the drivers
actions and the transport assignment. However, since
the configuration of a truck is highly correlated with
Interesting Regression- and Model Trees Through Variable Restrictions
285
Table 1: Characteristics of the dataset.
Property Amount Categorical Continuous
Instances 33196 - -
Variables 43 8 35
Configuration 12 8 4
Assignment 7 7
Driver 24 24
the fuel consumption, the configuration cannot be dis-
regarded. To be actionable and therefore interesting
to Scania, the engineers argued that trucks should be
grouped into subsets using configuration and assign-
ment related variables while the modeling of the fuel
consumption for each subset should be done based on
driver and assignment related variables.
4 METHOD
As described above, the use of subsets modeling is
a well-known and accepted approach in the automo-
tive industry. However, since this division is done
manually and solely based on domain knowledge and
basic statistics, there may be room for improvement.
What appears to be a natural grouping of vehicles for
a domain expert may be far from optimal for predic-
tive modeling. Specifically, if the grouping is done
based on domain knowledge, it is typically restricted
in complexity, and even to variables that the particu-
lar domain expert has a solid understanding of. At the
same time, a purely data driven approach is not neces-
sary better, since it may well produce none-actionable
models. Hence, we suggest an addition to the M5 al-
gorithm which allow the user to add restrictions for
how the splitting attributes are selected when creat-
ing regression or model trees. The extended algo-
rithm which, to the best of our knowledge, constitute
a straightforward yet novel addition to M5, is hence-
forth called ReReM, i.e., Restricted Regression- and
Model trees.
4.1 ReReM
ReReM was implemented as a modification of the
Weka (Blake and Merz, 1998), version of M5, called
M5P. In the standard implementation of M5P, splits
are selected using a standard search for the best split
among all available variables. The suggested exten-
sion modifies this process by restricting the attributes
to be considered. More precisely, only attributes al-
lowed at the current level of the tree are considered
when optimizing the split. The allowed attributes are
specified by the decision maker and given as a list of
(depth lists), where each depth list contains the al-
lowed variables for a specific depth. More specifi-
cally the M5P code in WEKA was extended with the
method getVariables (listed below) which was then
called every time a set of variables was requested.
Variables that are to be allowed in the linear regres-
sion leaves of a model tree can also be specified in
the same way. ReReM can be downloaded from
sites.google.com/site/GetReRem.
public DepthList getVariables(int nodeDepth,
DepthList[] lists){
for(DepthList dl:lists)
if(nodeDepth <= dl.getDepthLimit())
return dl.getAllowedVariables();}
5 EXPERIMENTS
The experiments aim to evaluate the benefits of using
ReReM instead of traditional modeling approaches.
Hence the two case studies are setup according to the
same scheme. First, the purely data driven approach
of using all available data is evaluated. Secondly,
the semi-manual approaches of creating more inter-
esting models using subsets of the original variables
are evaluated. These are the typical approaches that
could be used without ReReM. Finally ReReM are
used with constraints set by domain experts. To in-
crease readability of the experiments the purely data
driven experiments using all data are preceded with
a D, semi-manual experiments with an S and ReReM
experiments with an R.
The experiments related to modeling golf
player skill are evaluated using leave-one-out cross-
validation due to the relatively small number of
records. For experiments related to modeling of fuel
consumption, standard 10-fold cross-validation is
instead used. The predictive performance is reported
using the coefficient of determination (r
2
) and the
mean absolute error (MAE) when modeling golf
player skill. For the experiments concerning model-
ing of fuel consumption the relative mean absolute
error (RMAE) is reported instead of MAE due to
company policy. RMAE is relative to predicting
the mean value of each training set, e.g. RMAE is
calculated by dividing the MAE of the technique with
the MAE of predicting the mean value.
5.1 Results Modeling Golf Player Skill
In the first case study the idea is to help players fig-
uring out what aspect of their swing they need to im-
prove. Hence, the models should be based on parame-
KDIR 2015 - 7th International Conference on Knowledge Discovery and Information Retrieval
286
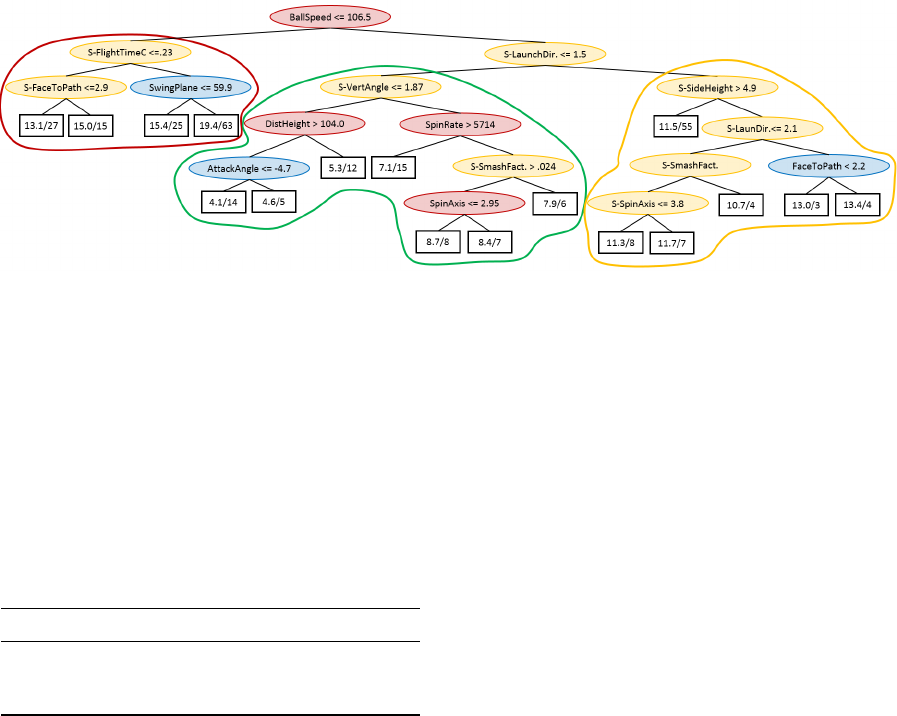
Figure 1: Regression tree based on all data (Exp. D).
ters related to the club rather than the ball flight. Fur-
thermore, since the first splits in a decision tree are
more important it is vital that these splits are based
on club related variables. If, instead, the first split
was based on, for instance, S-SpinAxis, this would
provide very little information to the player, typically
instead requiring further analysis to determine the
cause. Table 2 presents the results for all experiments
in this case study. These results and the details of the
experiments are discussed in the subsequent sections.
Table 2: Results modeling golf player skill.
Exp SplitV r
2
MAE Rules
D Club, Ball, STD .415 4.40 17
S Club .244 5.74 6
R Club to depth 3 then All .324 5.37 16
5.1.1 Data Driven Approach
Figure 1 above shows a tree created using the tra-
ditional data driven approach based on all available
data, i.e., club head, ball flight and the standard devi-
ations of all variables. Even if this approach was the
most accurate, (see results for D in table 2), the in-
terestingness of the tree is questionable, at best. Only
three, (marked in green) of sixteen splits are based on
club data, and the more important splits, near the root
of the tree, is based on ball speed and the standard
deviation of flight time and launch direction. Obvi-
ously, instructions based on this tree would require
further analysis of the cause of the standard devia-
tions. Disregarding this, some interesting observa-
tions may still be made. First, the tree groups players
of similar skill in leaves close to each other. There are
four different super groups marked in different col-
ors with the least skilled golfers marked in red and
the most skilled in green. It is also interesting that
the better of the least skilled players, i.e., players with
a predicted Hcp of 15.4, have a flatter swing plane
than the rest. Another interesting observation is that
the best players (marked in green) hit more down on
the ball in the swing, i.e., have a more negative attack
angle. A problem with these observations is, how-
ever, that the they are not applicable without first di-
viding the players using ball flight data and standard
deviations, thus severely limiting the usefulness of the
model. Nonetheless, if predictive performance is the
only concern this approach is clearly superior in terms
of r
2
and MAE.
5.1.2 Semi-automated Approach
The most simple approach of ensuring that the mod-
els are based on club related variables is of course to
create an attribute subsets only containing these vari-
ables. The results of this experiment, i.e., experiment
S is presented in table 2. However, even if some in-
teresting observations could be done, the tree created
with this approach had a substantially worse predic-
tive performance, compared to the purely data driven
approach. More specifically, the MAE was 5.74 and
r
2
0.244 compared to 4.40 and 0.415.
5.1.3 Restricted Approach using ReReM
Since the first level of splits are more important for
the interestingness of the models in this case study,
ReReM was setup to enforce restrictions accordingly.
More specifically, splits at the first three levels of the
tree were restricted to club related variables while
the succeeding splits could use all available vari-
ables. The motivation for this was to find a compro-
mise between the data driven approach and the semi-
automated approach presented above. Since the mod-
els in experiment D had an average of 4.5 splits in
each branch, a restriction for the first three levels was
deemed appropriate to ensure that a sufficient num-
ber of nodes were based on club variables, while still
leaving room for the inclusion of a few other vari-
ables. When comparing the accuracy of ReReM with
Interesting Regression- and Model Trees Through Variable Restrictions
287
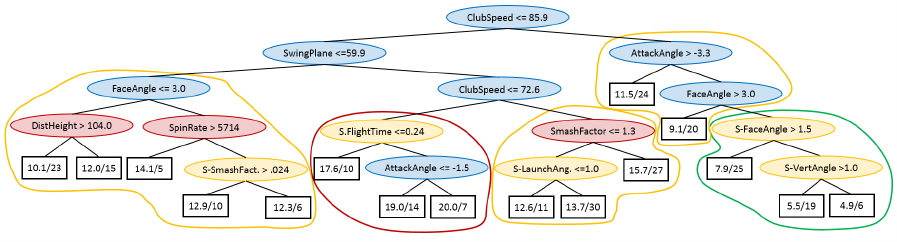
Figure 2: ReReM regression tree where splits to depth 3 are restricted to club data (Exp. R).
the simple approach of using only club data, ReReM
is clearly superior. More specifically, the tree created
using only club data had a r
2
of .244 compared to .324
of the ReReM tree and a MAE of 5.37 compared to
5.74. The tree created using all data, i.e., experiment
D, had a r
2
of .415 but was, for the reasons discussed
in section 5.1.1, deemed to be less interesting. Finally
it is of course interesting to interpret the resulting tree
presented in Figure 2. Again larger super groups of
players at different levels are present. Here, how-
ever, the larger groups are created using splits based
on club data which makes the rules much more inter-
esting. Some observations that can be made are:
• To become a really good player you must be able
to hit the ball with a club speed higher than 85.9.
• The swing plane is again important for differenti-
ating between players of average skill. Here, play-
ers with lower swing planes tend to have a lower
Hcp.
• Among hard hitting players, the players with
higher handicap should hit more down on the ball.
• If a hard hitting player achieves a sufficient attack
angle, the next important feature is the face angle,
i.e., that the face angle should not be too high. A
high face angle results in a launch direction fur-
ther from the target line, which must be counter-
acted by a curved shot which is harder to control.
All of these observations concur with modern swing
theory, except for the importance of the swing plane,
which is a non-trivial finding, which would be inter-
esting to study further. There are several other in-
teresting rules that can be found in this tree, but the
main point is that the most important splits are based
on club related variables. Hence, it would be simple
to directly suggest a particular exercise to improve the
attack angle, face angle or swing plane. In lower parts
of the tree, ball flight parameters still occur, but only
to discern among similarly skilled golfers. In these
cases, a teaching professional could add valuable in-
formation on what, for example, a player should do to
improve his smash factor. It should also be noted that
the data set consists of a relatively small number of
players and it is possible that a larger data set could
improve the possibility of explaining the difference
based on only club variables.
5.2 Results Modeling Fuel Consumption
ReReM is, simply put, a technique for simplifying
the semi-automatic procedure to subset modeling dis-
cussed in section 3.2, but it may also increase the ac-
curacy by performing a data driven creation of the
subsets. The main idea is to facilitate the use of more
explanatory variables while retaining some control
over how they are used to ensure that the created mod-
els become interesting and actionable. To enable an
comparison with the techniques used in practice, the
experiments of this case study are done using model
trees.
The results of the different approaches are all pre-
sented together in Table 3 to simplify a comparison of
their predictive performance. However, in the analy-
sis, each approach is discussed separately in the sub-
sequent sections. In Table 3, D1 is the purely data
driven approach, S1 and S2 are two different semi-
automated approaches while R1 and R2 use ReReM
to enforce variable restrictions. SplitV and RegrV
are the variables types used in the splits of the de-
cision tree and as regressors, i.e. C=configuration,
A=assignment and D=driver. In experiment S2 and
R1 only two variables, w=weight and s=speed, are al-
lowed for splitting the data. The superscripted letter
signifies if the splits were selected manually (m) or
data driven (d). All experiments are discussed in more
details in the following subsections.
5.2.1 Data Driven Approach
In the first experiment, D1, all available data is used
to create a single model tree using M5P. The results
show that the model tree obtained a rather high r
2
of
KDIR 2015 - 7th International Conference on Knowledge Discovery and Information Retrieval
288
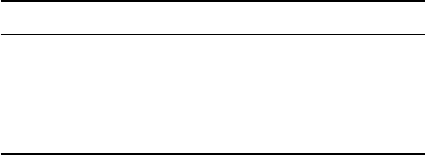
Table 3: Results for ReReM model trees.
Exp SplitV RegrV r
2
RMAE #Regr. #Vars.
D1 C,A,D C,A,D .886 .313 33.7 75
S1 - A,D .837 .392 1.0 25
S2 w
m
,s
m
A,D .860 .360 9.0 19.9
R1 w
d
,s
d
A,D .871 .342 14.2 22.2
R2 C,A A,D .897 .295 32.5 19.7
.886 and a low RMAE of 31.3%. The results are bet-
ter than all other approaches except R2, which will
be discussed later in subsection 5.2.3. The average
size of the model trees produced with this approach is
fairly large with 33.7 regression leaves, where each
regression expression is based on 75 variables. In
a balanced model tree with 33.7 leaves, the average
number of splits needed to reach a leaf is, however,
only slightly higher than 5, i.e., understanding and an-
alyzing the reasons for a specific prediction is clearly
manageable.
The regression expressions containing 75 vari-
ables, on the other hand, are very hard to analyze
manually. The reason for the large number of vari-
ables is the fact that M5P creates binary variables for
each category of a categorical variable, and also tend
to use most of these resulting binary variables. An-
other problem with model trees created using this ap-
proach is that the different variable types, i.e. configu-
ration, assignment and driver, are mixed, which is not
very usable in practice. Figure 3 illustrates this prob-
lem by showing a tiny sample tree created with the
same settings as for D1, with the exception of forcing
a higher number of instances per node to produce a
more compact tree. This model tree consists of two
driver related variables (marked in red), one config-
uration variable (marked in blue) and three variables
related to the configuration, (marked in yellow). The
two driver related variables DriveTime and Braking
cannot be described in more detail here, due to com-
pany policy. The three configuration related variables
are the number of axles of the truck, the horsepower
and var22 which is a configuration related variable
that we are not allowed to describe further, again due
to company policy. Finally, the only assignment spe-
cific variable present in the tree is weight, i.e., the total
weight including cargo of the truck averaged over the
traveled distance. Naturally, when performing pre-
diction, an instance meeting a split condition is sent
to the left child node of the split and if not to the
right child node. The leaves consist of a reference to
a linear regression, followed by the fuel consumption
relative to the mean and the percentage of the trucks
that reach the leaf. Hence, the leaf farthest to the left
in Figure 3, refers to the linear regression L1, makes
prediction for 4,4% of the trucks, which on average
have a fuel consumption 2% lower than the average
fuel consumption of all trucks. Note that the average
fuel consumption is only presented to facilitate a com-
prehensive interpretation of the trees since the linear
regression cannot be disclosed due to company policy.
The tree in Figure 3 is relatively straightforward
to interpret, i.e., higher values for weight, horsepower,
axles and braking do all result in higher fuel consump-
tion, which is as expected. The first split, DriveTime,
is however problematic, for the interpretation of the
tree, since it will result in that driver with similar
trucks and assignments can be modeled using differ-
ent regressions. Another problem was that all regres-
sion expressions included all types of variables. This
was deemed to be unsatisfactory by domain experts,
since they argued that it would be more logical to only
use the more constant configuration related variables
in the decision tree for creating the subsets. For these
reasons, the interestingness of the model was deemed
unsatisfactory in spite of the high predictive perfor-
mance.
5.2.2 Semi-automated Approaches
Due to the reasons mention in section 5.2.1, purely
data driven approaches are rarely used in practice.
Instead some kind of semi-automated approach is
used. Here, two approaches are evaluated in the
experiments S1 and S2. The predictive performances
of these experiments are presented in table 3.
Simple Approach
In the first Experiment, S1, the most simple and naive
approach to ensuring that driver related variables are
only present in the regressions, i.e. to not build model
trees but a single multiple linear regression based
on only driver- and assignment related variables, is
evaluated. The results presented in Table 3, does
however show that the models created with this ap-
proach has the worst predictive performance, for both
r
2
and RMAE, of all evaluated approaches. Hence,
there is an obvious trade-off between accuracy and
comprehensibility.
Manual Subset Modeling
The second semi-automated approach S2 is the tradi-
tional subset modeling approach discussed in section
3.2. Since the usage of a truck naturally has a huge
impact on its performance, domain experts in this case
recommended nine subgroups based on the average
total weight and average speed of the truck. Each vari-
able was used to split the vehicles into groups with
low (L) medium (M) or high (H) values resulting in
nine subgroups. Table 4 shows the resulting number
of instances in each group.
Interesting Regression- and Model Trees Through Variable Restrictions
289
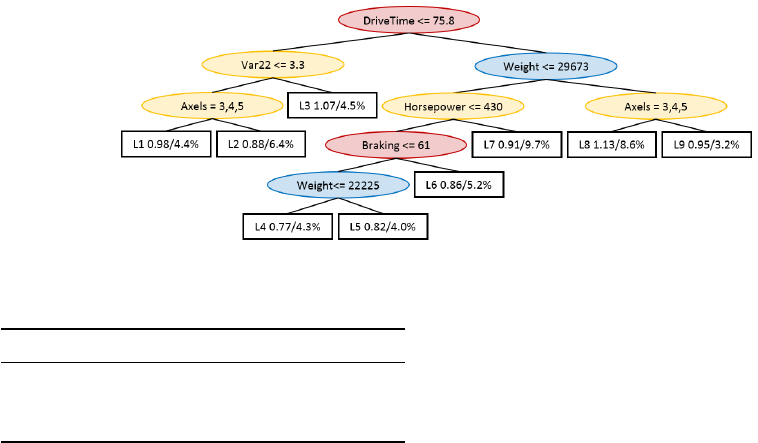
Figure 3: Model tree created using all available variables in both splits and regression (Exp. D1).
Table 4: Vehicles per subset.
L-Weight M-Weight H-Weight
H-Speed 1785 9762 4208
M-Speed 2982 6767 3937
L-Speed 1805 1179 771
When creating linear regressions for the subsets,
only assignment and driver related variables were
considered. Furthermore, to improve the generality
of the regressions a variable selection (shrinking) was
used for each subset using backward elimination. The
conventional 5% signification was used as the limit
for the variables to be excluded from the model. Fi-
nally one linear regression was created for each sub-
group. The nine resulting regression expressions were
considered to be the final model and were used for the
evaluation.
It is clear from the result in Table 3 that the man-
ual subsets modeling approach was successful since
it improved the performance compared to the simple
approach, using all of the presented measures. The in-
creased accuracy, however, was produced by a more
complex model, i.e., using nine regression models in-
stead of just one. It must be noted, though, that for
a specific vehicle only one regression needs to be in-
terpreted and the ones created for the subsets were
less complex, containing on average 20 variables. Fi-
nally, even if the manual subset method outperformed
the simple approach, it is still less accurate than the
purely data driven.
5.2.3 Restricted Modeling using ReReM
The manual subset modelling approach, used in
experiment S2, may be suboptimal in mainly two
ways; first the subsets created from the selected
variables may be suboptimal and second the variables
chosen may not be the most appropriate ones. To
shed some light on these questions, two experiments
are performed using ReReM. To evaluate how good
the manual subset modeling approach is in finding
good subsets, a data driven variant of experiment
S2 is first evaluated in experiment R1. Second,
experiment R2 evaluates if there are better variables
to base the splits on. It should be noted that these
experiments are only possible due to ReReM, and
could not have been performed using the original
version of M5P.
Data Driven Subset Modeling
In R1, i.e., the first experiment using ReReM, the aim
is to evaluate if the manual subset modeling in exper-
iment S2 can be improved. Here, ReReM is restricted
to use only weight and speed in the decision tree part,
while all assignment and driver related variables are
allowed in the leaf regression expressions. Hence,
the only difference compared to experiment S2 is that
the subsets are created using ReReM instead of ex-
perts using domain knowledge and statistics. Table
3 shows that ReReM resulted in models with higher
r
2
and lower RMAE, compared to S2. However the
ReReM models were also also slightly more complex
with an average of 14.2 leaves, each with on average
22.2 variables present in the regression expressions.
Considering the predictive performance results,
the manual subset modeling in experiment S2 is
relatively good compared to ReReM, with the same
restrictions. Finally, even if the models produced
in S2 and R1 are less accurate than the purely data
driven approach used in experiment D1, they are both
naturally more interesting and actionable since they
follow restrictions set by domain experts.
Modeling using ReReM
The final experiment R2 evaluates a more advanced
use of ReReM. Here, the aim is to create accurate
model tree that are still meeting the interesting-
ness criteria. According to the preferences of the
engineers, discussed in section 3.2.1, two main
requirement for interesting models were defined.
• Configuration related variables should only be
used to create subset of vehicles, i.e., in the de-
KDIR 2015 - 7th International Conference on Knowledge Discovery and Information Retrieval
290
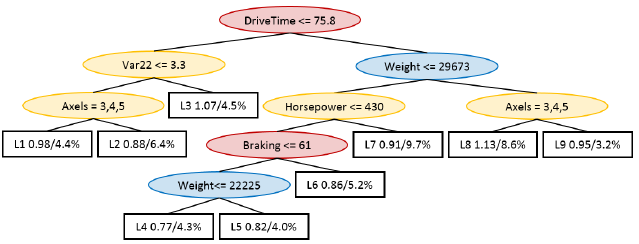
Figure 4: ReReM model tree restricted to variable types C and A for splits and A and D for regressors (Exp. R2).
cision tree part of the model tree.
• Driver related variables should only be used in the
regression expressions of the model tree.
Hence, ReReM is restricted to use configuration and
assignment related variables in the decision tree and
assignment and driver related variables in the regres-
sions.
A sample tree, created using ReReM with these
settings, is presented in Figure 4. As can be seen only
variables related to configuration and usage are used
in the splits. The first split separates trucks with only
two wheel axles from the rest, which makes perfect
sense, since two axles are used on smaller trucks with
lighter assignments. Splits based on speed next sep-
arates vehicles with lower averages speed and high
fuel consumption. The fact that lower speeds indi-
cate higher fuel consumption may seem counter intu-
itive but it most likely refers to transport assignment
with very heavy loads. The remaining splits are done
based on the weight and the number of horsepower
with higher weights and more horsepower leading to
higher consumption. Finally, the regression only con-
sisted of assignment and driver related variables due
to the applied restrictions. Again, the regression ex-
pressions are not disclosed due to company policy.
The model trees created with ReReM in this exper-
iment were deemed interesting since they fulfilled all
requirements set by the engineers.
Table 3, shows that this setup of ReReM, i.e.,
experiment R2 drastically improves the performance
compared to the subset modeling approaches of ex-
periment S2 and R1. More specifically ReReM here
achieved substantially higher r
2
AND clearly lower
RMAE, compared to the manual subset modeling in
experiment S2. This increase in accuracy is much
larger than between experiment S2 and S3 and hence
the main strength of the suggest approach lies in that
much more variables can be considered while still en-
forcing relevant restrictions rather than optimizing the
subset partitioning.
Considering the complexity of the models in ex-
periment R2 and S2 both approaches were rather sim-
ilar with regard to the number of variables in the re-
gressions (19.7 vs 19.9), but ReReM consisted of 32.5
different regressions (23.5 more than in S2) thus mak-
ing the model as a whole, more complex. However,
since the subsets are created using a binary trees the
difference does not need to be so big in practice. A
balanced binary decision tree would require slightly
more than three tests on average to create the nine
subsets in experiment 1, while five would be sufficient
to create the subset for the ReReM model. Hence, for
a single vehicle, the added complexity is more or less
negligible.
Another important result is how ReReM in exper-
iment R2 compares to the purely data driven approach
in D1. Interestingly enough, ReReM actually pro-
duced more accurate model trees than the purely data
driven version. In fact ReReM had a slightly higher
r
2
and a little bit lower RMAE. Obviously, the restric-
tions, had a positive effect on the predictive perfor-
mance. Since, both techniques used the same vari-
ables the difference must come from the experts rea-
soning behind the given restriction. Instead of losing
accuracy to gain the ability to act on the models, with
ReReM, interesting, i.e., actionable, models, was pro-
duced without sacrificing accuracy.
6 CONCLUSION
Based on the results presented in sections 5.1 and 5.2,
it is clear that the suggested approach ReReM can cre-
ate more interesting regression and model trees by en-
forcing variable constraints.
In the first case study concerning modeling of golf
player skill, the regression trees created using ReReM
were deemed, by a teaching professional, to be much
more interesting than a purely data driven regression
tree. The reason for the increased interestingness was
that the ReReM could be restricted to only use swing
related variables in the first levels of the trees. With
Interesting Regression- and Model Trees Through Variable Restrictions
291
this description, it would be fairly easy for a teaching
professional to spot the deficiencies of the swing and
suggest drills to improves these areas. The purely data
driven model had a superior predictive performance,
compared to ReReM, but was mainly based on vari-
ables related to the ball flight. Consequently, further
analysis would be required to suggest exercises and
hence the model was deemed to be less interesting.
The purpose of the second case study was to cre-
ate a better decision support for coaching of truck
drivers. Here, ReReM was compared to a manual sub-
set modelling approach often used in practice. More
specifically nine subsets were created manually us-
ing domain knowledge and statistics, based on the
average speed and total weight of the trucks. When
restricted to the same constraints as the manual ap-
proach, ReReM could increase the predictive perfor-
mance slightly by creating more subsets. An impor-
tant point is that while the manual approach is very
time consuming for human experts - at least one man-
day was needed - the corresponding task could be per-
formed within a few minutes using ReReM.
The main advantage of ReReM was, however,
demonstrated when restrictions set by engineers was
enforced. Here, the same constraints as for the man-
ual approach applied, except that more variables were
considered. In this experiment ReReM, created mod-
els with significantly lower RMAE than the manual
approach, while still producing interesting models. In
addition, when compared to the purely data driven ap-
proach ReReM, actually had a slightly higher predic-
tive performance, while obtaining, in contrast to the
data driven approach, interesting models.
Finally, the complexity of the ReReM models was
slightly higher, i.e., the paths in the tree typically in-
cluded one or possibly two more conditions, but in
practice this would most likely be a small price to pay
for a more interesting model with high predictive per-
formance.
ACKNOWLEDGEMENTS
This work was supported by the Knowledge Founda-
tion through the project Big Data Analytics by Online
Ensemble Learning (20120192) and by Region V
¨
astra
(VGR) under grant RUN 612-0198-13, University of
Bor
˚
as and University of Sk
¨
ovde.
REFERENCES
Betzler, N. F., Monk, S. a., Wallace, E. S., and Otto, S. R.
(2012). Variability in clubhead presentation charac-
teristics and ball impact location for golfers’ drives.
Journal of Sports Sciences, 30(5):439–448.
Blake, C. L. and Merz, C. J. (1998). UCI Repository of
machine learning databases.
Broadie, M. (2008). Assessing Golfer Performance Using
Golfmetrics. Science and Golf V: Proceedings of the
2008 World Scientific Congress of Golf, (1968):253–
262.
Dietterich, T. (1996). Editorial. Machine Learning,
2(24):1–3.
Fradkin, A., Sherman, C., and Finch, C. (2004). How well
does club head speed correlate with golf handicaps?
Journal of Science and Medicine in Sport, 7(4):465–
472.
Freitas, A. (2002). A survey of evolutionary algorithms for
data mining and knowledge discovery. Advances in
Evolutionary Computation, pages 819–845.
Garofalakis, M., Hyun, D., Rastogi, R., and Shim, K.
(2003). Building decision trees with constraints. Data
Mining and Knowledge Discovery, 7(2):187–214.
Grbczewski, K. and Duch, W. (2002). Heterogeneous
Forests of Decision Trees. Artificial Neural Networks
(ICANN).
Iqbal, M. R. A., Rahman, S., Nabil, S. I., and Chowdhury,
I. U. A. (2012). Knowledge based decision tree con-
struction with feature importance domain knowledge.
2012 7th International Conference on Electrical and
Computer Engineering, pages 659–662.
Iqbal, R. A. (2011). Empirical Learning Aided by Weak
Domain Knowledge in the Form of Feature Impor-
tance. 2011 International Conference on Multimedia
and Signal Processing, pages 126–130.
Lomax, S. and Vadera, S. (2013). A survey of cost-sensitive
decision tree induction algorithms. ACM Computing
Surveys, 16(2).
Nijssen, S. and Fromont, E. (2010). Optimal constraint-
based decision tree induction from itemset lattices.
Data Mining and Knowledge Discovery, 21(1):9–51.
N
´
u
˜
nez, M. (1991). The use of background knowledge in
decision tree induction. Machine learning, 250:231–
250.
Quinlan, J. R. (1992). Learning with continuous classes.
In 5th Australian joint conference on artificial intelli-
gence, volume 92, pages 343–348.
Struyf, J. and Dzeroski, S. (2006). Constraint Based Induc-
tion of Multi-objective Regression Trees. 3933:222–
233.
Sweeney, M., Mills, P. M., Alderson, J., and Elliott, B. C.
(2013). The influence of club-head kinematics on
early ball flight characteristics in the golf drive. Sports
Biomechanics, 12(3):247–258.
Trackman (2015). TrackMan A/S.
KDIR 2015 - 7th International Conference on Knowledge Discovery and Information Retrieval
292
