
High Performance Virtual Machine Recovery in the Cloud
Valentina Salapura
1
and
Richard Harper
2
1
IBM T. J. Watson Research Center, 1101 Kitchawan Rd, NY, Yorktown Heights, U.S.A.
2
IBM T. J. Watson Research Center, Research Triangle Park, NC, U.S.A.
Keywords: Cloud Computing, High Availability, Virtualization, Automation, Enterprise Class.
Abstract: In this paper, we outline and illustrate concepts that are essential to achieve fast, highly scalable virtual
machine planning and failover at the Virtual Machine (VM) level in a data center containing a large number
of servers, VMs, and disks. To illustrate the concepts a solution is implemented and analyzed for IBM’s
Cloud Managed Services enterprise cloud. The solution enables at-failover-time planning, and keeps the
recovery time within tight service level agreement (SLA) allowed time budgets via parallelization of
recovery activities. The initial serial failover time was reduced for an order of magnitude due to parallel VM
restart, and to parallel VM restart combined with parallel storage device remapping.
1 INTRODUCTION
Cloud computing is being rapidly adopted across the
IT industry as a platform for increasingly more
demanding workloads, both traditional and a new
generation of mobile, social and analytics
applications. In the cloud, customers are being led
to expect levels of availability that until recently
were available only to the largest of enterprises.
Cloud computing is changing the way high
availability (HA) of a data center can be
implemented. It is widely recognized that the
standardization, virtualization, modularity and cross
system management capabilities of cloud computing
offer a unique opportunity to provide highly resilient
and highly available systems. Resilience techniques
can build on a well-defined and uniform framework
for providing recovery measures for replicating
unresponsive services, and recovering failed services
to respond to disaster scenarios. Since virtualization
allows packaging of workloads — operating system,
applications, and data — into a portable virtual
machine image container, it facilitates transfer of
workloads from one server to another. High
availability features can migrate a VM image from
one physical server to another within the same data
center if the original server suffers any failure,
performance loss, or to perform scheduled
maintenance.
However, clouds and the workloads that run on
them are big. Many high availability systems were
originally designed for smaller managed
environments, and do not scale well as the system
size and complexity increases. Detecting failures,
determining appropriate failover targets, re-mapping
storage to those failover targets, and restarting the
virtual workload have to be carefully designed and
parallelized in order to meet the service level
agreement (SLA) for large systems.
This paper describes a highly scalable parallel
virtual machine planning and recovery method that
enables high availability at the Virtual Machine
(VM) level for large data centers comprising many
high-capacity servers, many VMs, and a large
number of disks in a storage area network (SAN).
The system enables on-the-fly failover planning and
execution for a compute environment with a large
number of servers and storage devices.
The functionality described in this paper has
been released as part of IBM’s enterprise cloud
offering known as CMS (Cloud Managed Services),
where it was used to provide scalable HA for the
AIX Logical Partitions (LPARs) running on the
CMS Power Systems (Sinharoy et al., 2015) servers.
To stay within this context, the paper will continue
to use the Power LPAR terminology. However, the
concepts described here apply equally well to any
platform that is similarly structured. While in this
paper we focus only on the infrastructure level
resiliency, CMS cloud implements all application
level high availability approaches. However, they
are not in scope of this paper, and will not be
discussed here.
559
Salapura V. and Harper R..
High Performance Virtual Machine Recovery in the Cloud.
DOI: 10.5220/0005493405590564
In Proceedings of the 5th International Conference on Cloud Computing and Services Science (CLOSER-2015), pages 559-564
ISBN: 978-989-758-104-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

2 BACKGROUND AND
POSITION STATEMENTS
2.1 Virtual Machine-Level and
Application-Level High Availability
Are Complimentary
There are multiple approaches to provide a high
availability solution in a virtual environment. One
approach is to provide HA at the application level,
using what are commonly known as HA Clustering
techniques. Another approach is to provide
availability at the infrastructure level, using VM-
level HA.
Application-level high availability techniques are
built around application clustering technology.
These solutions are used to improve the availability
of applications by continuously monitoring the
application’s resources and their physical server
environment, and invoking recovery procedures
when failures occur. These solutions typically use
multiple virtual machines which are working
together in order to ensure that an application is
always available. These VMs are arranged in active-
passive or active-active configuration. When one
VM fails, its functionality is taken over by the
backup VM in the cluster. Examples of these
solutions are IBM PowerHA (IBM, 2008), Microsoft
Clustering Services (Microsoft, 2003), Veritas
Storage Foundation, and LinuxHA.
HA solutions at the infrastructure level are
designed to ensure that the virtual resources meet
their availability targets. This is accomplished by
continuously monitoring the infrastructure
environment, detecting a failure, and invoking
recovery procedures when a failure occurs.
Typically, such recovery procedures involve
restarting the failed VM, either on the same or a
different physical server.
Although this paper will not discuss application-
level HA in detail, we have found that application-
level HA and infrastructure-level HA can operate
beneficially together with no mutually destructive
effects. A tidy separation of concerns exists -
infrastructure-level HA restarts VMs when
appropriate (sometimes on alternate servers), while
application-level HA sees these restarts as simple
system crashes and recoveries, which it is designed
to tolerate anyhow. In addition, recovery of the VMs
in a cluster on another server after the originating
server fails restores the redundancy that the
application-level HA cluster relies upon, minimizing
the time during which that cluster is operating with
degraded resiliency.
2.2 Dynamic Storage Mapping Is
Preferable to Static Mapping
Virtualized infrastructures can be designed such that
either all physical servers in a server pool are
statically mapped to all the storage devices that may
be used by the virtual machines, or all physical
machines are dynamically mapped to only the
storage devices that are needed to support the virtual
workload running on the respective physical
machines. The first design choice has the merits of
being simpler to operate, since no remapping of
storage is required as virtual machines migrate or
failover within the pool. However, it is unsuitable
for high-scale cloud environments where the pool
may consist of hundreds or more servers, supporting
thousands of virtual machines, which in turn use
even more storage devices. In this environment, the
architectural and design limits of the hypervisor
running on each physical server cannot support the
huge number of simultaneous connections required
to support all possible VM-storage device mapping.
Instead, it is desirable to have a physical server only
possess storage mappings for those VMs that are
actually running on that physical server, and this is
the design point utilized in this paper. The
disadvantage of this approach are that, if it is
necessary to migrate or failover a VM from one
server to another, it is necessary to map that VM’s
storage to the destination physical server, and unmap
that storage from the source physical server.
2.3 Parallelization of Recovery Is
Critical to Maintaining SLAs
Complex recovery activities consist of a number of
sequential steps that must often be executed using
tools, processes, and infrastructure elements that
have limited recovery performance and concurrency.
Given the large scale of a recovery operation
(recovery of potentially thousands of virtual
machines across dozens of physical servers), it is
absolutely necessary to judiciously parallelize these
recovery actions and eliminate bottlenecks to meet
tight SLAs. The limited space herein does not permit
a full exposition of these position statements, but we
will partially illustrate them using an implemented
case study based on the IBM Cloud Managed
Services (CMS) architecture.
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
560

3 CMS POD ARCHITECTURE
CMS is a cloud computing offering for enterprise
customers. It is designed to bring the advantages of
cloud computing to the strategic outsourcing
customers of IBM. It provides standardized,
resilient, and secure IBM infrastructure, tools, and
services with full ITIL management capabilities
(Cannon, 2011). CMS offers functions such as
consumption-based metrics and automated service-
management integration.
The design of the CMS is based upon a unit
called the point of delivery (PoD). A PoD contains
many physical managed resources (server, storage,
and network) that are virtualized, and provided to
customers as an infrastructure offering. A CMS PoD
contains Intel-based servers to support virtual and
bare metal Windows and Linux workloads, and IBM
Power servers to support virtual AIX workloads. The
Power virtual machines are called Logical Partitions,
or LPARs. This paper focuses on the recovery of the
AIX workloads, contained in LPARs, in the event
that a Power server fails.
A PoD is designed to be highly available, with
the physical infrastructure architected to eliminate
single points of failure. The customer is offered
selectable availability SLAs, which are contractual
obligations and may include penalties for
noncompliance. These availability agreements are
only for unplanned outages and refer to Virtual
Machine availability. CMS supports multiple levels
of availability ranging from 98.5% to 99.9%. A
more detailed description of the CMS can be found
in (Salapura, 2013).
PoDs also contain a number of managing servers
which host management tools for storage
management, backup, and performance monitoring.
3.1 Fault Model: Permanent Failure of
a Power Server
The remainder of this paper will describe the
architecture we have created for recovering LPARs
on other physical servers when one or more Power
Systems physical servers hosting those LPARs has
failed.
In this failure mode, a Power Server suffers a
hardware failure from which it cannot recover in a
short time (for example, 10 minutes) and for which
maintenance/repair is required. In this case, the
failover process will restart all affected LPARs on
another Server. The function implementing this
recovery process is called Remote Restart. The
recovered LPARs need to use the same network
storage disks – referred to as LUNs (logical unit
number) that the original Server was using. Restarts
are prioritized by SLA. Recovery from other types
of outages and transient failures are covered by
means not described in this paper.
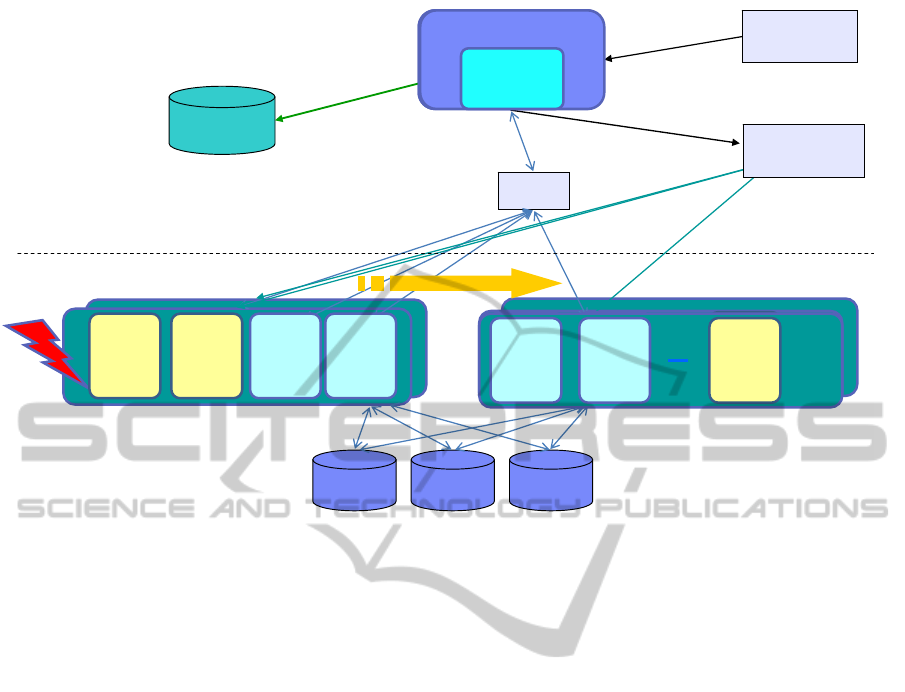
4 REMOTE RESTART
ARCHITECTURE
The architecture of the Remote Restart solution used
in CMS PoDs is illustrated in Figure 1. There are
one or several managing servers, indicated in the
upper part of the figure, and a number of managed
servers with storage are illustrated in the lower part
of the figure. The managing servers host tools for
controlling, provisioning, managing and monitoring
of the workload on managed servers. Relevant
managing tools are Provisioning engine, which uses
a DB to maintain all the PoD management
information, a Storage management engine, and a
Hardware Maintenance Console (HMC) for server
management. The Remote Restart software and
collected configuration data resides on a
management server for Virtualization management.
The managed servers host LPARs running
customers’ AIX workload. Each managed Power
server also contains dedicated LPARs called Virtual
I/O Servers (VIOS) that virtualize external storage
and present it to the customer’s LPARs.
4.1 Overview of Recovery Procedure
The tasks that the Remote Restart solution performs
are as follows:
Periodic data gathering and persistence:
configuration and status of LPARs in a PoD is
collected periodically. The time interval for data
gathering is configurable, and is given later in
this paper. There are two sources of collecting
needed information:
o information about physical servers in the
PoD, all LPARs and their hosts, and their
storage and network configuration; this
information is collected via HMC;
o SLA availability information for all
LPARs; this information is obtained by
querying the Provisioning engine database.
Server failure detection: the health of all servers in
a PoD is monitored in order to detect their
failure. A failure of a server is detected via
HMC when it returns an ERROR state.
HighPerformanceVirtualMachineRecoveryintheCloud
561
Remote restart on a
management server
Remote
Restart
HMC
Managed Servers
ssh
Restart
info
Provisioning
engine
Capturing system
information
periodically and
stores locally
Reads out SLA information
for restart priority
Virtualization Mgr.
Dynamically connects
storage to servers
Commands to managed
servers issued via HMC
Managing Servers
Restart priority
determined by
LPAR SLAs
System status
monitoring
Storage
management
VIOS
VIOS
LPAR
VIOS
VIOS
VIOS
VIOS
LPARVIOS VIOS
LPARVIOS VIOS
LPAR LPAR VIOS VIOS
Remote
Restart
Virtualization Mgr.
Remote
Restart
Virtualization Mgr.
Figure 1: Remote Restart architecture.
Server fencing: once a server is determined faulty, it
is powered off via HMC commands.
Failover planning: provides an evacuation plan. Our
Remote Restart implementation uses a
“Dynaplan” (Harper, 2011) algorithm to
determine the optimal failover targets.
VIOS configuration for failover: in this step, virtual
SCSI devices are created via HMC on the
failover server for LPARs to be restarted.
SAN configuration for failover: LUNs are not
connected to all servers in a PoD, and the
connecting of LUNs to the failover servers
according to the evacuation plan is performed in
this step.
LPAR restart: once virtual SCSI devices are created
and LUNs and connected to the failover server,
an LPAR is restarted on the failover server via
HMC commands.
The Remote Restart scripts performs these steps
by issuing ssh commands to the HMC, via database
queries to the Provisioning engine, and by issuing
commands for storage configuration.
4.2 Failover Planner
Failover planning is based on a parallelized
algorithm evolved from the prior dynamic resource
planner described in (Harper, 2011). The planner
formulates a schedule to restart a large collection of
interdependent VMs on a large collection of
resources. There are a number of constraints the
planner has to meet, for example that recovery time
objective is met, that the maximum number of the
most important dependency groups is started, that
VMs within a dependency group are started in the
proper order, and that the capabilities of the
environment (e.g., restart bandwidth and capacities)
are not exceeded.
Restart priority is a partial ordering of all VMs
into priority classes. Within a given priority class, all
VMs can be restarted in parallel, subject to restart
parallelism constraints of the physical environment
and application start order dependencies. A “restart
rules” language allows customization of the restart
priority based on restart rules. A restart rule template
can be automatically populated by discovery tools
and/or manually edited.
The restart priority is automatically and
dynamically determined based on a number of VM
properties, such as SLAs, application priority,
application topology, and other rules as determined
by the dynamic restart priority calculator and a given
set of rules. Priority aggregation rules convert the
various restart rules into the VM restart partial
priority order while taking into account application
dependencies.
The cost of running the planner is low, so it is run
at failure-handling time. In addition, the failover
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
562

planner is run once per day for each server in a PoD
to determine any resource constraint, for example to
determine if there are capacity problems so that not
all LPARs can be hosted on the remaining hosts. If
this condition is detected, a warning notification is
sent to the cloud administrators for the purposes of
planning.
5 IMPLEMENTATIONS AND
RESULTS
5.1 Initial Implementation: Serial
Restart
The restart priority of LPARs is based on their SLA.
Thus, in case of failover, the highest SLA workloads
would be restarted first followed by the next highest
SLA. Within the same SLA level, restart priority is
random. In an early CMS release, restart capability
was needed only for workloads with the two highest
level SLAs. This initial Remote Restart
implementation was implemented as a single process
which, after the failure of a server is detected, and
the need for a failover process was determined,
would initiate the failover process.
For each LPAR on the affected server, the
failover planner determines a destination server, and
the restart process starts. The failover process is
performed for the highest priority LPARs first,
configuring the storage and network for these
LPARs to their destination servers, and restarting
them at the destination server. After all LPARs with
the highest restart priority are restarted at their target
servers, the next lower priority level LPARs are
processed.
There are two significant time components to
executing the restart. The first is the process of
unmapping the LUNs from the (failed) original
server and mapping them to the designated failover
server. This time is proportional to the number of
LUNs connected to the LPAR. The second time
component is the process of restarting the LPAR on
the designated failover server.
In this early CMS release, each LPAR was
allowed to have up to two LUNs. For the case where
only the top two SLAs were to be restarted, with up
to two LUNs per LPAR, the SLA time budget was
readily met.
However, in the subsequent releases of CMS, the
number of disks per LPAR was continuously
increased. In addition, it was necessary to extend
restart capabilities to all SLA levels. With these
increases, it was clear that we needed a solution for
Remote Restart which would handle restarts for a
larger number of LPARs containing more LUNs,
within the SLA time limits.
5.2 Parallel Restart
The requirement for an increased number of LUNs
per LPAR, and the increased number of LPARs
which need to be restarted motivated us to improve
the Remote Restart solution using parallel processes.
We chose to use server-level parallelism in which the
level of parallelism depends on the number of
operational servers in the PoD.
In our parallelization scheme, one restart process
is launched for each destination server. For example,
in a PoD with 6 servers, and one failed server, there
would be up to 5 destination failover servers. One
restart process is initiated for each destination server.
LPARs assigned for restart on that particular server
are restarted sequentially, starting with the highest
priority LPARs in that group. For each LPAR,
storage is mapped, storage and network drivers are
reconfigured for the target server, and the LPAR is
restarted at the destination server. Once all highest
priority LPARs assigned to that destination server
are restarted, the next SLA priority level LPARs are
processed. A similar process is performed in parallel
for all destination servers.
These parallelization steps ensured that the
failover time was well within the allowed SLA for
the subsequent releases of CMS.
5.3 Parallel Disk Mapping
However, the disk capacity in CMS continues to
increase. For the current release, each LPAR can
have up to 24 LUNs and up to 96 TB of storage. For
a large number of LPARs on a single server, this can
lead to the case where a very large number of storage
LUNs has to be mapped to different servers in short
time.
Analysis indicated that the procedure that was
taking the most amount of time was the process of
mapping disks to the destination server, so our next
improvement focused on parallel disk mapping. In
this implementation, in addition to the number of
parallel failover processes that is started, we also
initiate the mapping of multiple disks attached to a
single LPAR in parallel. We limit the number of
simultaneous mappings of disks for a single failover
stream to four to avoid potential bottleneck at the
storage management interface. By measuring the
time needed for restarting individual LPARs with a
HighPerformanceVirtualMachineRecoveryintheCloud
563

different number of LUNs and time measured for
parallel failover streams, we analyzed failover time
needed for parallel disk restart.
The analysis shows that adding this additional
level of parallel processing brings the failover time
requirements well within the available time budget
for the worst-case configuration known to date.
6 CONCLUSIONS AND FUTURE
WORK
In this paper, we presented a highly scalable parallel
virtual machine planning and failover method that
enables high availability at a VM level in a data
center. This solution is efficient for large data centers
comprising many high-capacity servers, many VMs,
and a large number of disks. The solution is
implemented and used in IBM’s CMS enterprise
private cloud.
The system enables at-failover-time failover
planning and execution for a compute environment
with a large number of servers and storage. The
described system keeps the recovery time within
limits to a service level agreement (SLA) allowed
time budget. With this design, we reduce the initial
failover time requirements by more than an order of
magnitude by using parallel failover and parallel
storage mapping implementation.
As our future work, we plan to explore the
applicability of this solution for disaster recovery
(DR), where a whole PoD needs to be restarted at a
failover data center within the allowed recovery time
objective (RTO).
REFERENCES
Cannon, D. 2011. ITIL Service Strategy 2011 Edition, The
Stationery Office, 2nd edition, 2011.
Harper, R., Ryu, K., Frank, D., Spainhower, L., Shankar,
R., Weaver, T., 2011. DynaPlan: Resource placement
for application-level clustering, 2011 IEEE/IFIP 41st
International Conference on Dependable Systems and
Networks Workshops, pp. 271 – 277, 2011.
IBM, 2008. Implementing PowerHA for IBM i, IBM
Corporation, Armonk, NY, USA, 2008. [Online].
http://www.redbooks.ibm.com/abstracts/sg247405.html.
Microsoft, 2003. Introducing Microsoft Cluster Service
(MSCS) in the Windows Server 2003 Family,
Microsoft Developer Network. [Online]. https://
msdn.microsoft.com/en-us/library/ms952401.aspx.
Salapura, V., Harper, R., Viswanathan, M., 2013. Resilient
cloud computing, IBM Journal of Research and
Development, vol. 57, no. 5, pp. 10:1-10:12, 2013.
Sinharoy, B. et al., 2015. IBM POWER8 processor core
microarchitecture. IBM Journal of Research and
Development, vol. 59, no. 1, pp. 2:1-2:21, 2015.
CLOSER2015-5thInternationalConferenceonCloudComputingandServicesScience
564
