
SysML-Sec
A Model Driven Approach for Designing Safe and Secure Systems
Yves Roudier
1
and Ludovic Apvrille
2
1
EURECOM, 450 Routes des Chappes, 06410 Biot Sophia-Antipolis, France
2
Institut Mines-Telecom, Telecom ParisTech, CNRS LTCI, 450 Routes des Chappes, 06410 Biot Sophia-Antipolis, France
Keywords:
Model-Driven Engineering, Safety, Security, SysML, Embedded Systems.
Abstract:
Security flaws are open doors to attack embedded systems and must be carefully assessed in order to determine
threats to safety and security. Subsequently securing a system, that is, integrating security mechanisms into
the system’s architecture can itself impact the system’s safety, for instance deadlines could be missed due to
an increase in computations and communications latencies. SysML-Sec addresses these issues with a model-
driven approach that promotes the collaboration between system designers and security experts at all design
and development stages, e.g., requirements, attacks, partitioning, design, and validation. A central point of
SysML-Sec is its partitioning stage during which safety-related and security-related functions are explored
jointly and iteratively with regards to requirements and attacks. Once partitioned, the system is designed in
terms of system’s functions and security mechanisms, and formally verified from both the safety and the se-
curity perspectives. Our paper illustrates the whole methodology with the evaluation of a security mechanism
added to an existing automotive system.
1 INTRODUCTION
Embedded systems and Cyber-Physical Systems pro-
gressively impact our daily lives, information sys-
tems, and industrial systems. Because these systems
are by essence connected, they are strongly exposed
to attacks. To cite only a few examples of past attacks
on similar connected systems, we can mention the
Microsoft XBox (Huang, 2002), ADSL routers (As-
solini, 2012), mobile&smart phones (Maslennikov,
2010) (Esser, 2011) (Apvrille and Strazzere, 2012),
avionic systems (Teso, 2013) or automotive systems
(Teso, 2013), and even home appliances such as re-
frigerators as demonstrated recently by a botnet in-
fecting LG fridges (Proofpoint, 2014). Such attacks
also target industrial systems whose sensors are more
and more commonly connected with vulnerable in-
formation systems, as demonstrated by the Stuxnet,
Flame, or Duqu (Maynor, 2006) attacks. The depend-
ability of such systems can of course be targeted by
such attacks with very various objectives, e.g., terror-
ist acts and ransomware.
The complexity of such systems in terms of code
size, distribution, and heterogeneity among others
is a major factor for the risks they face. We con-
tend that taking into account security from the very
first development phases, and including both software
and hardware components, could lower the risk those
systems face, both in terms of security and safety.
We also think that safety and security should be de-
signed and validated all together, that is, from the
same models, and that the impact of the security
mechanisms execution over the safety-related func-
tions should be clearly established. Our solution re-
lies on a model-driven environment named SysML-
Sec. SysML-Sec covers all design and development
phases, including requirement capture, attack equa-
tions, functional model, hardware/software partition-
ing, designs of software components, and validation
of both safety and security properties. The valida-
tion itself shall be performed at partitioning and de-
sign stages. In the first case, the objective is to assess
the effectiveness of the selected hardware/software ar-
chitecture to support both safety and security require-
ments, and resist to identified attacks. In the second
case, the validation should closely investigate whether
the design choices respect the safety and security re-
quirements.
SysML-Sec has already been presented
in (Apvrille and Roudier, 2013). This paper fo-
cuses on a new aspect, that is, how SysML-Sec
can also be used to evaluate the impact of security-
655
Roudier Y. and Apvrille L..
SysML-Sec - A Model Driven Approach for Designing Safe and Secure Systems.
DOI: 10.5220/0005402006550664
In Proceedings of the 3rd International Conference on Model-Driven Engineering and Software Development (SPIE-2015), pages 655-664
ISBN: 978-989-758-083-3
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

oriented design onto systems with strong critical
aspects, e.g., critical embedded systems, or systems
whose attack may lead to strong economical loss,
e.g., new interconnected information systems such as
cloud services.
The paper is organized as follows. Section 2 fo-
cuses on the impact of attacks on safety-critical sys-
tems. Section 3 discusses different modeling ap-
proaches to efficiently take into account both the sys-
tem architecture and requirements in the develop-
ment process of a safe ad secure system. Then, we
present the methodology and the validation process
of the SysML-Sec framework in Sections 4 and 5,
respectively, with a strong emphasis on the relation
between safety and security properties and features.
An automative-based case study is given in section 6.
Section 7 concludes the paper.
2 IMPACT OF ATTACKS
Performing attacks relies on the exploitation of ei-
ther low-level vulnerabilities (e.g., buffer overflows)
or design weaknesses. Low-level vulnerabilities can
often be handled with good programming practices,
or by using efficient security tests, e.g., different kinds
of fuzzing. On the contrary, design errors generally
come from a bad requirement and attack capture, or
from a bad partitioning of hardware / software compo-
nents, including security mechanisms that those com-
ponents implement. Unfortunately, those errors are
more difficult to correct once the system has been re-
leased. Moreover, security tools commonly used by
security experts, e.g. ProVerif (Blanchet, 2009) and
AVISPA (Armando et al., 2005), not take into account
the hardware/software partitioning.
Classical information systems are still widely tar-
geted by attackers. Nonetheless, the particularities of
information systems comprising communicating em-
bedded equipments make them even more “interest-
ing” targets for attackers. We can mention three dan-
gers related to those attacks:
• If an attack relies on a hardware vulnerability,
it can be difficult, or even impossible, to cor-
rect (i.e., patch) the system via a software up-
date, in particular if functions have been imple-
mented mostly with hardware components, e.g.,
with hardware accelerators or network filtering
techniques. In the case of usual information sys-
tems, a “simple” software update and a system re-
boot can generally solve the problem.
• Updating the software of embedded system is
much more complex than updating the software
of, e.g., PCs. For instance, to patch the software
of a vehicle, it is necessary to send a letter to the
owner, that will later bring the car to a mainte-
nance garage. Users of embedded systems are
also less used to update their systems, as recently
demonstrated with IP cameras. On the contrary,
updating a PC or a server has become a common
practice (the famous “Tuesday patch”), and can be
handled remotely in an automated way.
• The impact of attacks on safety critical systems
can be much higher than on other kinds of sys-
tems. Moreover, the growing interconnection
between information systems and smart objects
gives more chances to attackers to enter illegally
those systems, once he/she has managed to com-
promise one of the interconnected element. This
is the case, e.g., for botnets (DoS attacks, spams),
as demonstrated recently by the LG fridge at-
tack (Proofpoint, 2014), or for performing cryp-
tographic attacks.
3 THE FUNDAMENTAL ROLE OF
SYSTEM ARCHITECTURE TO
DEVELOP A SECURE SYSTEM
From our own experience, we think that main system
architectural elements must be first modeled in order
to better capture and analyze potential attacks on the
system.
3.1 Software/Hardware Partitioning
Software-centric systems are commonly designed
with a V-cycle comprising the following stages: re-
quirements elicitation, software analysis, software de-
sign, implementation. Each of these stages are then
followed with a corresponding verification state, that
commonly relies on testing, simulation and formal
verification techniques. In the case of embedded sys-
tems, that approach is obviously applicable only once
functions to be software implemented have been spec-
ified. In other words, the V-cycle can start only once
the software and hardware partitioning has been per-
formed.
System partitioning (a.k.a. Design Space Explo-
ration) is a process to analyze various functionally
equivalent implementation of systems specification.
It usually relies on the Y-chart approach (Balarin
et al., 2003) depicted in Figure 1:
1. Applications are first described as abstract com-
municating tasks: tasks represent functions inde-
pendently from their implementation form.
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
656
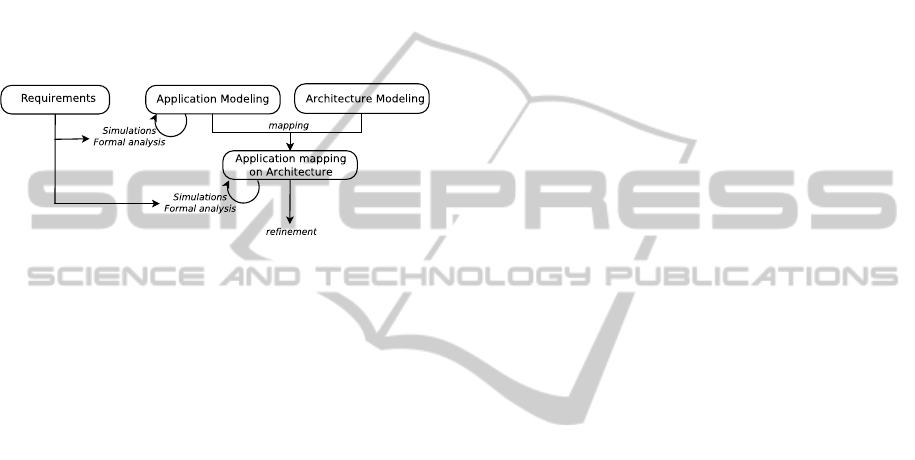
2. Targeted architectures are independently de-
scribed from tasks. They are usually described
with a set of execution nodes (e.g., CPU), com-
munication nodes (e.g., buses), and storage nodes
(e.g., memories).
3. A mapping model defines how application tasks
and abstract communications are assigned to com-
putation and communication / storage devices, re-
spectively. For example, a task mapped on a hard-
ware accelerator is a hardware-implemented func-
tion whereas a task mapped over a CPU is a soft-
ware implemented function.
Figure 1: The Y-chart methodology.
Ideally, the result of the Y-chart approach shall be
an optimal hardware / software architecture with re-
gards to criteria at stake for that particular system
(e.g., cost, area, power, performance, flexibility, relia-
bility, etc.). This process can be manually performed
by experiemnted engineers, or can be automated by
specific toolkits, e.g. (Balarin et al., 2003). This
partitioning step is of utmost importance. Indeed, if
critical high-level design choices are invalidated af-
terwards because of late discovery of issues (perfor-
mance, power, etc.), then it may induce prohibitive
re-engineering costs and late market availability.
3.2 Dimensioning
In some highly critical systems, models for design
space exploration are not intended for computing
and analyzing Worst Case Execution Time. On the
contrary, dimensioning-based techniques based on
network calculus (Leboudec and Thiran, 2001) are
adapted to compute worst case execution scenarios.
These techniques are typically used for defining the
architecture of aeronautics systems. Dimensioning
models are part of our overall toolkit (Apvrille et al.,
2010), even if they are not (yet) used in SysML-Sec.
3.3 Model-Driven Engineering
Model-Driven Engineering is probably the main con-
tribution of the last decade in modeling approaches.
MDE targets system analysis, design, simulation,
code generation, and documentation. MDE generally
relies on the UML language, and on meta-modeling
techniques in order to define Domain-Specific Lan-
guages. OMG’s Model Driven Architecture for
instance specifically targets two abstraction levels,
namely the Platform-Independent Model (PIM) and
Platform Specific Model (PSM): embedded systems
are thus clearly targeted by MDE. Profiles have also
been defined by the OMG to more specifically address
embedded systems: SPT (OMG, 2005) and MARTE
(Vidal et al., 2009), but none of them addresses re-
quirements modeling. Conversely, the SysML OMG
profile (OMG, 2012) clearly takes into account re-
quirements with explicit modeling capabilities and di-
agrams, but ignores some problematics inherent to
embedded systems, e.g., the partitioning issue.
Other methodologies, like for example Extreme
programming (XP) (Beck and Andres, 2004) or Ag-
ile Software Development (Waters, 2012) have also
been proposed to develop software-oriented systems.
However, their software focus means that they totally
ignore the partitioning issue. They also make trace-
ability and refinement extremely hard to achieve, also
because requirements are mostly separate from the
design process.
4 SPECIFYING THE SECURITY
NEEDS OF A SYSTEM
Security and privacy are commonly after-thought in
new connected and distributed information systems
(e.g., cloud services) and embedded system, in con-
trary to safety. Thus, security needs appear after the
system has already been released, generally when se-
curity vulnerabilities are discovered. Nonetheless,
those vulnerabilities have a critical aspect whenever
the can be exploited to impact economical or safety-
related components.
4.1 Security Goals and Threats
Many research works have already addressed the
modeling and analysis of security requirements and
threats, mostly in the scope of information systems.
Nhlabatsi et al. (Nhlabatsi et al., 2010) classify them
in four categories: goal-oriented approaches, model-
driven approaches, process-oriented approaches and
last problem-oriented approaches. The two first are
the two closest to SysML-Sec. KAOS is a well-known
goal-oriented approach (Van Lamsweerde, 2007) that
relies on the explicit model of security goals and anti-
goals. TwinPeaks (Nuseibeh, 2001) also follows a
goal-oriented approach with an agile iterative process
between goals and system architecture. UMLSec is
SysML-Sec-AModelDrivenApproachforDesigningSafeandSecureSystems
657
a model-oriented approach. It includes tools for the
specification and verification of distributed systems
with security mechanisms, including cryptographic
protocols. Model-oriented approaches are considered
as more adapted to the design of security mechanisms,
but goal-oriented approaches offers a better way to
analyze security requirements during the first design
iterations.
4.2 SysML-Sec: A SysML-based
Model-oriented Approach
The first objective of SysML-Sec (Apvrille and
Roudier, 2013) is to facilitate the collaboration and
communication between experts in system design
and experts in system security and privacy. More-
over, SysML-Sec intends to cover all development
methodological stages of these system. SysML-Sec
combines a goal-oriented approach for capturing re-
quirements, and a model-oriented approach for sys-
tem architecture and threats. In contrary to Twin-
Peaks (Nuseibeh, 2001), SysML-Sec follows the Y-
chart scheme (Balarin et al., 2003) and its underly-
ing allocation techniques. The latters facilitates the
identification of resources to be protected and the link
between resources, safety requirements, and security
requirements.
4.3 Methodology
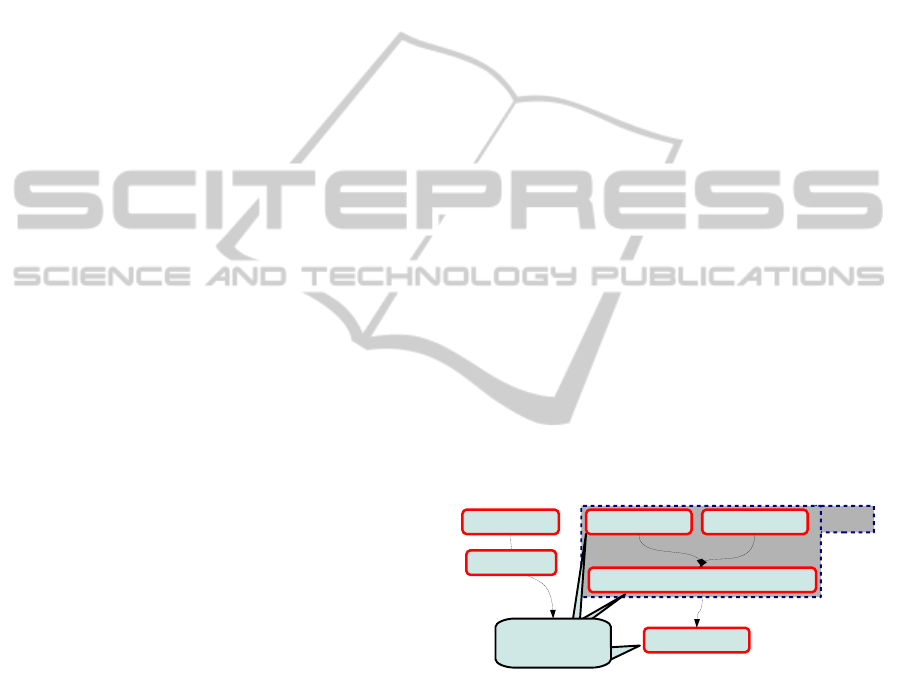
The SysML-Sec methodology is first based on an Y-
Chart-based system analysis, and then on a software
design phase following the well-known V-cycle. This
methodology is given at Figure 2.
The analysis stage intends to identify and ana-
lyze both requirements and attacks altogether with
the identification of main functions (“application”),
candidate hardware architectures, and the mapping of
main functions over execution nodes (mapping). Dur-
ing the functional stage, simulations and (formal) ver-
ifications are used in order to identify safety-related
issues, e.g., deadlock situations, non -reachability of
error states, etc. Functional models are untimed,
which means that no performance study can be lead.
Yet, the mapping of functions over execution nodes
gives to the former a logical and physical execution
time. Thus, post-mapping simulations and formal
verifications are intended to demonstrate the system
performance on the selected hardware architecture,
including the study of latencies, the load of proces-
sor and buses, and communication time. Obviously,
the results are due to the logical parts of the appli-
cation, to the way the underlying hardware behaves,
but also to the security mechanisms. For example,
a given security protocol may impact a bus load, a
cryptographic function may impact a processor load:
Both can consequently increase the overall system la-
tency. The mapping scheme, for example, mapping
a cryptographic function over a hardware accelera-
tor, or on a general-purpose processor, also impacts
system latencies. The performance study thus really
intends to study altogether both safety and security
functions mapped in different conditions. The result
of this study is a hardware/software architecture that
complies with both safety and security requirements,
and that can resist to attacks, and according to a given
risk level.
The goal of the design stage is to design the soft-
ware components, that is, functions mapped onto pro-
cessors at previous stage. During the design, soft-
ware components are progressively refined until the
point where executable code generation is feasible.
This refinement also includes security-related func-
tions, e.g., security protocols. During the first refine-
ments, simulation can be used to debug the models.
When the model is of reasonable size, formal veri-
fication can also be used to assess safety properties
(e.g., the reachability of a given state, or its liveness),
and security properties (e.g., the confidentiality of a
given block attribute, the authenticity of a message).
When the model is too large to be verified, model-
to-code transformations are used to perform security
and safety tests. This paper do not address the design
stage, but it is described in (Apvrille and Roudier,
2013).
y-chart
Attacks
Requirements Application Architecture
Application mapped on architecture
System design
mapping
Simulation,
Formal verification
Testing
Figure 2: The SysML-Sec methodology.
4.4 Toolkit
The free and open-source TTool software supports
all SysML-Sec methodological stages, including the
models capture and their simulations and verifica-
tions. In fact, TTool is a multi-profile toolkit which
main strength is to offer a press-button approach for
performing simulation and formal proofs from mod-
els. Proofs can be performed automatically for both
safety and security properties. For the partitioning
stage, TTool relies on the DIPLODOCUS UML pro-
file (Apvrille et al., 2006), even if security aspects pre-
sented in this paper are specific to SysML-Sec. Re-
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
658

quirements, attacks, software design and all captured
and analyzed with AVATAR (Apvrille and De Saqui-
Sannes, 2013) which covers the V development cy-
cle. Formal verifications and simulations can be per-
formed either with TTool’s integrated model checkers
and simulators, or with external formal verification
toolkits, e.g. UPPAAL (Bengtsson and Yi., 2004),
CADP (Garavel et al., 2007) and ProVerif (Blanchet,
2009).
5 SAFETY AND SECURITY
ORIENTED VALIDATIONS
Model-oriented approaches do favor the early vali-
dation of models. SysML-Sec supports such valida-
tion, either from partitioning models, or from design
models. Validations are supported by TTool with a
press-button approach: models can be transformed
by TTool into a formal specifications. TTool has its
own model-checker, but it can also relies on exter-
nal provers. Once the validation results have been
obtained (property is satisfied, property is not satis-
fied, property cannot be proved), the model is back-
annotated with the results. Formal validation is more
likely to be used to prove specific and precise safety
and security property, e.g., that a given data is confi-
dential. Simulation is more likely to be used when-
ever the impact of a security mechanism over safety
properties (e.g., latency-related properties) must be
studied. This impact is mostly studied at partitioning
stage.
5.1 Safety Properties
Such validations concern the following models: func-
tional models, partitioning models, and design mod-
els. Properties can be proved with the use of sim-
ulation techniques (Apvrille and De Saqui Sannes,
2011), of formal verification techniques (Apvrille and
De Saqui-Sannes, 2013) (Bengtsson and Yi., 2004),
or by generating an executable code (only from re-
fined design models) and performing tests on that
code (Apvrille and Becoulet, 2012). From design di-
agrams, safety proofs take into account both safety
and security mechanisms, because the latter impact
the behaviour of software components, e.g., taking a
given execution path.
The system architecture and behaviour are com-
monly modeled with graphical languages. On the
contrary, languages used for expressing properties
still mostly rely on textual languages, e.g. LTL/CTL,
or languages derived from those ones. Yet, it is pos-
sible in SysML-Sec to model all logical and timing
properties with SysML parametric diagrams (Knor-
reck et al., 2011).
5.2 Security Properties
In the design stage, formal proofs of confidentiality
and authenticity properties can be performed. If pos-
sible, security requirements must first be refined into
confidentiality and authenticity properties modeled as
pragmas in SysML-Sec block diagrams. TTool can
then transformed the design diagrams into a security-
oriented formal specification in pi-calculus (Pedroza,
2013). This specification can be given as input to
ProVerif, along with the confidentiality and authen-
ticity properties to be proved (Blanchet, 2009).
5.3 Safety and Security, Safety vs.
Security
It is not a common practice to assess the relation-
ship between safety and security at partitioning stage.
Yet, we believe that this should be addressed as
soon as possible in the development cycle, as sug-
gested by the SysML-Sec methodology. Eames and
Moffet (D. P. Eames and Moffett, 1999), and more
recently Pi
`
etre-Cambac
´
ed
`
es (Pietre-Cambacedes and
Bouissou, 2013) and Raspotnig (Raspotnig and Op-
dahl, 2013) have proposed ways to handle the links
between safety and security properties. More pre-
cisely, (Pietre-Cambacedes and Bouissou, 2013) and
(Raspotnig and Opdahl, 2013) aim at explicitly de-
scribing conflicts between such requirements, and
also to provide “reinforcements”, that is, require-
ments with different scope that drives the architecture
models in the same direction.
As we show in the next section, SysML-Sec
makes it possible to assess the compatibility of secu-
rity mechanisms with regards to safety properties in
partitioning stage, relying on validation techniques.
Similar studies can be lead during the design stage.
During the partitioning stage, mechanisms are
evaluated according to the system latency and the us-
age of the platform, e.g., the necessary computation
power, the load of buses, and the respect of real time
deadlines. Partitioning models are typically validated
by generating a known average traffic in the system,
and then introducing security mechanisms so as to
evaluate the impact of the latter on the former. The
refinement of SysML-Sec models leads to introduce
fine-grained cryptographic functions where properties
to be proved are more likely to be the reachability of
the given state of a security protocol. Thus, at design
stage, we also rely on provers so as to assess the con-
sistency of requirements and the coverage of attacks.
SysML-Sec-AModelDrivenApproachforDesigningSafeandSecureSystems
659
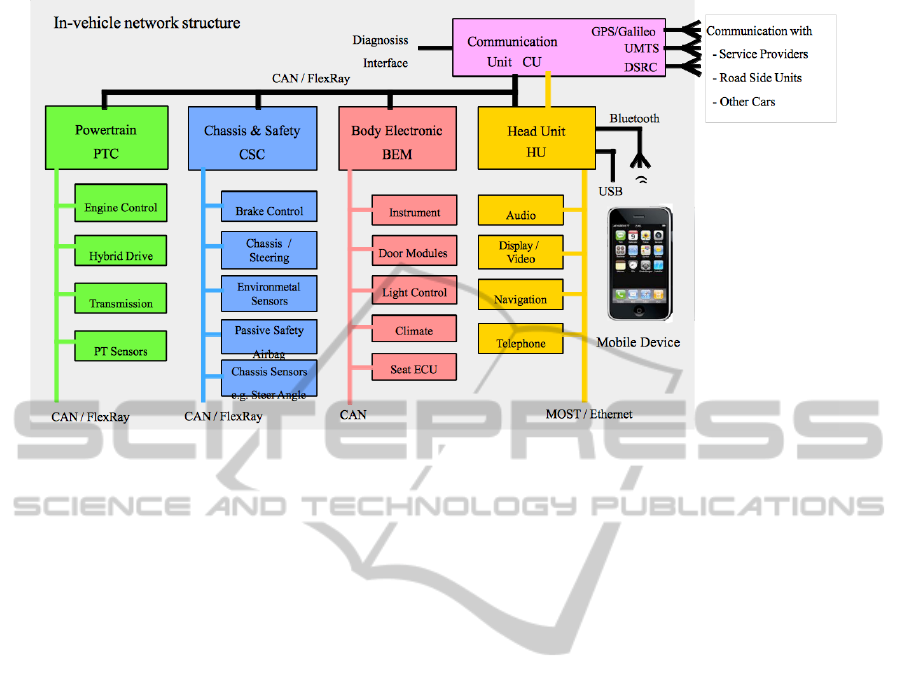
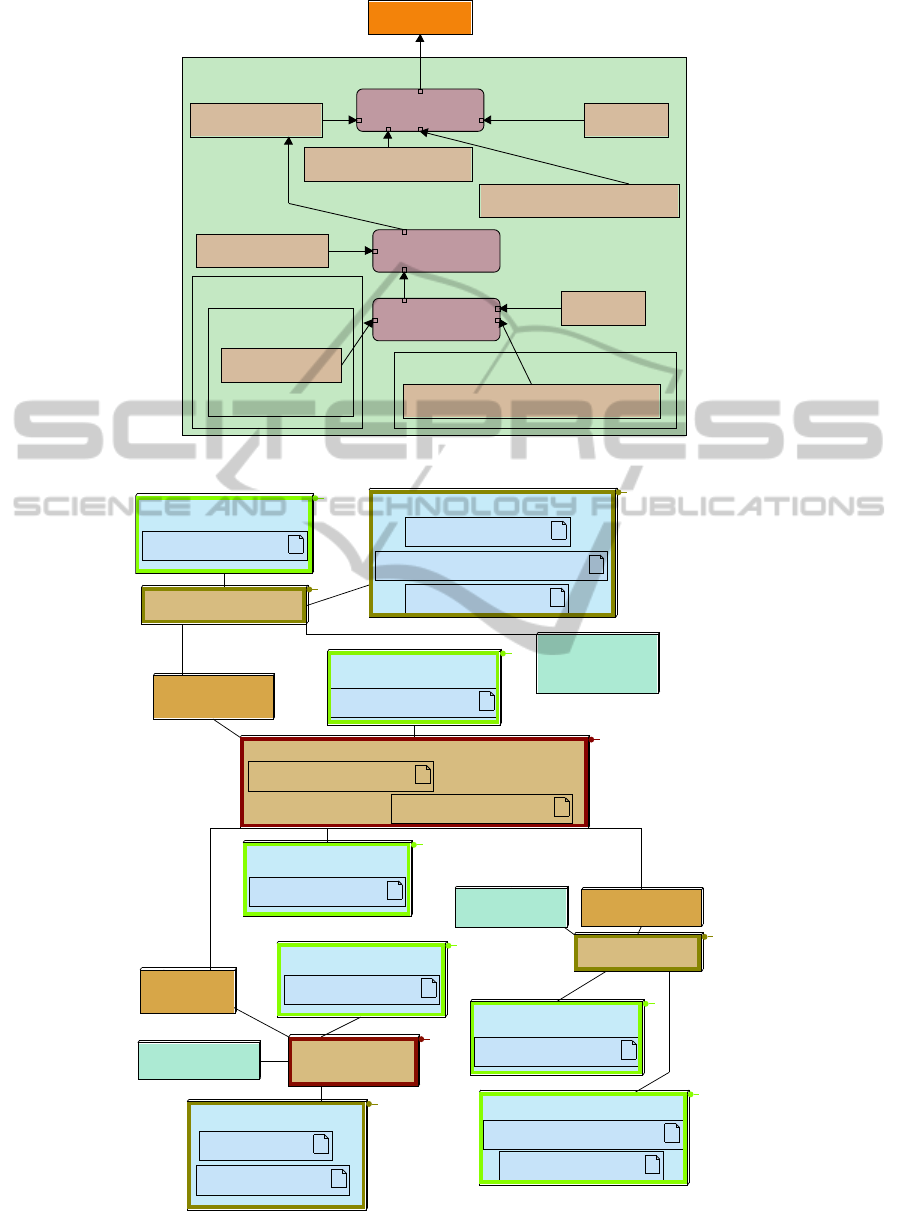
Figure 3: EVITA automotive reference architecture.
6 EXAMPLE: SAFETY AND
SECURITY ANALYSIS OF A
COMMUNICATING VEHICLE
This section illustrates the use of SysML-Sec for the
identification of requirements and attacks and for the
definition of safe and secure system architecture. The
automotive system that serves as case study is taken
from the European FP7 EVITA project (Kelling et al.,
2009). EVITA has defined the first generic secu-
rity architecture for automotive communicating sys-
tems. This architecture contains safety critical ECUs
(Electronic Control Units) interconnected with CAN
or Flexray buses. Automotive systems are likely to be
attacked either for economical reasons (activating op-
tional features for free, stealing a car), either for crim-
inal purpose. The interconnection of automotive sys-
tems to information systems (roads signs, tolls, etc.)
and Internet will offer new ways to conduct attacks
onto those systems.
A reference automotive architecture is given in
Figure 3. It is built upon several domains (Power-
train, chassis & Safety, Communication Unit, Head
Unit, etc.). Domains may contain several sub do-
mains, each of them containing several buses and pro-
cessors. A main CAN/FlexRay bus interconnects all
ECUs bridges together. At last, the communication
and head units have external interfaces (Bluetooth,
LTE, etc.).
We now apply the SysML-Sec methodology with
the addition of a security mechanism to the reference
architecture. This mechanism is the distribution of
cryptographic session keys between domains and sub-
domains. An ECU1 asks the “key master” to generate
a session key so as to communicate in a secure way
with other domains ECUN of this session.
6.1 Security Requirements
Security requirements are captured within SysML
requirements diagrams. Security requirements are
stereotyped << SecurityRequirement >> and con-
tains an extra kind field (confidentiality, access con-
trol, integrity, freshness, etc.). Usual SysML rela-
tions between requirements (containment, derive) can
be used, in particular to trace requirements through-
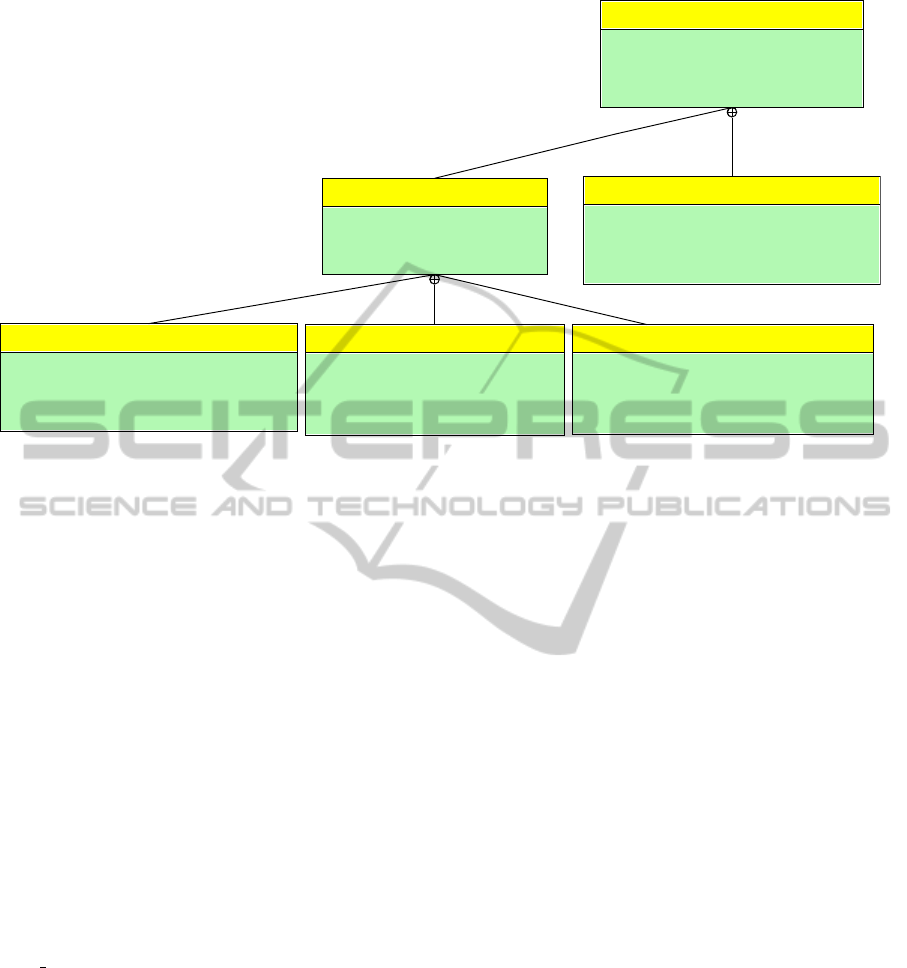
out the different abstraction levels. Figure 4 presents
an excerpt of security requirements dealing with the
prevention of the injection of wrong commands into
the system. The main requirement is refined into
authenticity, integrity and freshness requirements for
all communication between ECUs involved in system
functions.
6.2 Threats and Attacks
Attacks are commonly captured with attack
trees (Schneier, 1999). Such trees allow an effi-
cient decomposition of attacks into sub-attacks. Yet,
they are not adapted to the description of complex
scenarios. Yet, attacks currently lead on embedded
systems are generally composed of complex sce-
narios, sometimes involving complex logical and
timing relations, e.g., the Zeus/Zitmo attack exploits
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
660
<<Security Requirement>>
PreventSendingFakeCommand
ID=FSR-1
Kind="Functional"
Risk="High"
Targeted attacks=""
<<Security Requirement>>
IntegrityOfMessageAttributesAlongFunctionalPath
ID=FSR-1.1.3
Text=""
Kind="Integrity"
Risk="High"
Targeted attacks=""
<<Security Requirement>>
MessageFreshnessAlongFunctionalPath
ID=FSR-1.1.2
Text=""
Kind="Freshness"
Risk="High"
Targeted attacks=""
<<Security Requirement>>
PreventManInTheMiddleAttack
ID=FSR-1.1
Text="Internal attack"
Kind="Integrity"
Risk="High"
Targeted attacks=""
<<Security Requirement>>
PreventReplacementOfChipsOnLocalBusses
ID=FSR-1.2
Text=""
Kind="Controlled access (authorization)"
Risk="High"
Targeted attacks=""
<<Security Requirement>>
AuthenticationOfFunctionalPath
ID=FSR-1.1.1
Text="This includes the authentication of functions,
and of the functions on the ECUs"
Kind="Data origin authenticity"
Risk="High"
Targeted attacks=""
Figure 4: Excerpt of security requirements.
a time-limited authentication token.
We thus decided to introduce a richer attack model
based on SysML parametric diagram: attack equa-
tions. These equations are meant to offer a set of con-
straints linking together sub-attacks, in order to build
more complex attacks.
Attacks are captured with “properties” of SysML
blocks. Since Blocks represent resources of the
system, a visual emphasis on architectural elements
to protect is obtained. Constraints are used to re-
late attacks together: << OR >>, << AND >>,
<< SEQU ENCE >>, << BEFORE >>, <<
AFT ER >>. Each constraint has a denotational cor-
respondence, e.g. the equation of a << OR >> be-
tween two attacks a1 and 2 is a = a
1
∨ a
2
, with a being
the resulting attack. Attacks can also be linked to re-
quirements, and vice-versa.
Figure 5 depicts a simplified attack of our case
study. A main resource AutomotiveECUsandBuses
is the target of an attacker wishing to steal the car
(Steal car root attack). To successfully perform that
attack, the attacker first need to connect on the system
bus so as to be able to open the doors and then start
the engine. Opening the doors is actually optional
since the attacker could decide to break the windows,
and thus, doors-related attacks are optional (See the
parenthesis around the (2) and (3) in the sequence
constraint). To access to the system bus, the attacker
can either connect with a remote interface (Bluetooth,
Internet), either through a debug interface (OBD-II
plug). For both solutions, he then needs to bypass
the automotive system firewall.
6.3 Hardware/Software Partitioning
A SysML block instance diagram is used to describe
functions, and their relations. Data and event flows
between functions can be described with ports and
links. Semantically speaking, data flow do not model
values of those data, but only the quantity of ex-
changed data: this grandly simplifies proofs and sim-
ulations at that level of abstraction (memo: validation
takes into account both software and hardware com-
ponents). Also, in the scope of complex systems, we
have demonstrated that this does not impact partition-
ing decisions (Jaber, 2011).
The architectural and mapping models rely on a
UML deployment diagram, but the allocation mech-
anism of SysML or MARTE could be used for that
purpose. the mapping of functional blocks, and their
communications, is based on artifacts added to de-
ployment nodes, that latter being assets to be pro-
tected. They are likely to be also depicted in the attack
diagrams.
In order to evaluate the impact of security mech-
anisms, two simulations are performed onto two dif-
ferent partitioning. A first simulation is performed on
the automotive system with no security mechanisms
The purpose of that simulation is to evaluate the CAN
bus load, because it is in charge of conveying urgent
and non-urgent messages between domains. The av-
erage load with no security is 40%.
A second simulation evaluates how the perfor-
mance of the previous system is impacted by the key
distribution protocol. For that purpose, a subset of the
automotive system is modeled: cryptographic hard-
SysML-Sec-AModelDrivenApproachforDesigningSafeandSecureSystems
661
<<block>>
AutomotiveECUsAndBuses
<<attack>>
Plug_on_OBD
<<OR>>
<<attack>>
Bypass_internal_firewall
<<AND>>
<<attack>>
Listen_to_OpenDoor_messages
<<attack>>
Connect_to_System_Bus
<<attack>>
Inject_or_Replay_OpenDoor_Message
<<SEQUENCE>>
<<block>>
CommunicationUnit
<<attack>>
CompromisedCommunicationUnitThroughInternet
<<block>>
HeadUnit
<<block>>
Bluetooth
<<attack>>
Connect_to_Bluetooth
<<root attack>>
Steal_Car
(3)
1
(2)
<<attack>>
Start_engine
4
Figure 5: Describing an attack with a SysML parametric diagram.
<<CPURRPB>>
HSM_ECUN
KDP Perf Design_Sec::HSM_ECUN
0%
<<CPURRPB>>
CPU_ECUN
KDP Perf Design_Sec::CTP_ECUN
KDP Perf Design_Sec::KeyManager_ECUN
0%
<<BUS-RR>>
InternalBusECUN
47%
<<MEMORY>>
MemoryECUN
<<BRIDGE>>
BridgeECUN
<<CPURRPB>>
HSM_KM
KDP Perf Design_Sec::HSM_KM
0%
<<CPURRPB>>
CPU_KM
KDP Perf Design_Sec::KM
KDP Perf Design_Sec::CTP_KM
47%
<<BUS-RR>>
InternalBusKM
95%
<<MEMORY>>
MemoryKM
<<BRIDGE>>
BridgeKM
<<CPURRPB>>
HSM_ECU1
KDP Perf Design_Sec::HSM_ECU1
0%
<<CPURRPB>>
CPU_ECU1
KDP Perf Design_Sec::DistributionManager_ECU1
KDP Perf Design_Sec::CTP_ECU1
KDP Perf Design_Sec::App_ECU1
47%
<<BUS-RR>>
InternalBusECU1
47%
<<MEMORY>>
MemoryECU1
<<BRIDGE>>
BridgeECU1
<<BUS-CAN>>
MainCAN
KDP Perf Design_NoSec::highPrioLoad
channel
KDP Perf Design_NoSec::lowPrioLoad
channel
99%
<<CPURRPB>>
CPU_Source
KDP Perf Design_Sec::LoadSource
3%
<<CPURRPB>>
CPU_Sink
KDP Perf Design_Sec::LoadSink
0%
Figure 6: Simulation with the key distribution mechanism.
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
662

ware accelerators (HSM - Hardware Security Mod-
ule), the ECU asking for a session key (ECU1), the
Key Master (KM), and the ECUs that will participate
to the session and thus need the session key. The sim-
ulation shows a much higher load on the main CAN
bus during a key distribution, and a much higher la-
tency was observed for all classes of traffic not re-
lated to the key distribution (Schweppe et al., 2011):
this security mechanism do impact the safety of the
system. To solve that issue, one solution we exper-
imented with was to split in several successive mes-
sages the authentication information.
7 CONCLUSION AND FUTURE
WORK
Many attacks are now conducted on embedded sys-
tems and cyber-physical systems. A short time-to-
market combined with strong safety and security re-
quirements encourages the introduction of new devel-
opment methodologies for those systems.
SysML-Sec integrates in the same development
cycle semi-formal specifications of both safety and
security features and properties. Simulations and for-
mal proofs on models can be easily conducted with
TTool, so as to assess architectural choices and design
choices, in terms of performance, safety properties,
and security properties. Moreover, SysML is based
on a well known and recognize language for system
engineering, and is totally supported by TTool.
SysML-Sec has been defined and used in the
scope of the EVITA project, that is, to secure an
automotive embedded system. The case study pre-
sented in this paper is extracted from this project, and
demonstrates the interest and choices of SysML-Sec.
One important objective of our work is now to add
reasoning capabilities to SysML-Sec. More precisely,
our goal is to verify that critical functionalities are
not inhibited by the introduction of security mecha-
nisms, e.g. message ciphering or network filtering.
This could be done with logic inference rules.
REFERENCES
Apvrille, A. and Strazzere, T. (2012). Reducing the window
of opportunity for android malware. gotta catch’em
all. Journal in Computer Virology, 8(1-2):61–71.
Apvrille, L. and Becoulet, A. (2012). Prototyping an Em-
bedded Automotive System from its UML/SysML
Models. In ERTSS’2012, Toulouse, France.
Apvrille, L. and De Saqui Sannes, P. (2011).
AVATAR/TTool : un environnement en mode
libre pour SysML temps r
´
eel. G
´
enie Logiciel,
(98):22–26.
Apvrille, L. and De Saqui-Sannes, P. (2013). Requirements
analysis. Embedded Systems: Analysis and Modeling
with SysML, UML and AADL.
Apvrille, L., Mifdaoui, A., and De Saqui-Sannes, P. (2010).
Real-time distributed systems dimensioning and vali-
dation: The turtle method. Studia Informatica Univer-
salis, 8(3):47–69.
Apvrille, L., Muhammad, W., Ameur-Boulifa, R., Coudert,
S., and Pacalet, R. (2006). A UML-Based Environ-
ment for System Design Space Exploration. In Elec-
tronics, Circuits and Systems, 2006. ICECS ’06. 13th
IEEE International Conference on, pages 1272 –1275.
Apvrille, L. and Roudier, Y. (2013). SysML-Sec: A SysML
environment for the design and development of secure
embedded systems. In APCOSEC 2013, Yokohama,
Japan.
Armando, A., Basin, D., Boichut, Y., Chevalier, Y.,
Compagna, L., Cuellar, J., Drielsma, P., Hem, P.,
Kouchnarenko, O., Mantovani, J., Mdersheim, S.,
Oheimb, D., Rusinowitch, M., Santiago, J., Turuani,
M., Vigan, L., and Vigneron, L. (2005). The avispa
tool for the automated validation of internet secu-
rity protocols and applications. In Etessami, K. and
Rajamani, S., editors, Computer Aided Verification,
volume 3576 of Lecture Notes in Computer Science,
pages 281–285. Springer Berlin Heidelberg.
Assolini, F. (2012). The Tale of One Thousand and One
DSL Modems, kaspersky lab.
Balarin, F., Watanabe, Y., Hsieh, H., Lavagno, L.,
Passerone, C., and Sangiovanni-Vincentelli, A.
(2003). Metropolis: An Integrated Electronic System
Design Environment. Computer, 36(4):45–52.
Beck, K. and Andres, C. (2004). Extreme Programming
Explained: Embrace Change (2nd Edition). Addison-
Wesley Professional.
Bengtsson, J. and Yi., W. (2004). Timed automata: Seman-
tics, algorithms and tools. In Lecture Notes on Con-
currency and Petri Nets, pages 87–124. W. Reisig and
G. Rozenberg (eds.), LNCS 3098, Springer-Verlag.
Blanchet, B. (2009). Automatic Verification of Correspon-
dences for Security Protocols. Journal of Computer
Security, 17(4):363–434.
D. P. Eames, D. P. and Moffett, J. (1999). The integration
of safety and security requirements. In SAFECOMP,
pages 468–480.
Esser, S. (2011). Exploiting the iOS Kernel. In BlackHat
2011.
Garavel, H., Lang, F., Mateescu, R., and Serwe, W. (2007).
CADP 2006: A Toolbox for the Construction and
Analysis of Distributed Processes. In Proceedings of
the 19th International Conference on Computer Aided
Verification CAV 2007.
Huang, A. (2002). Keeping Secrets in Hardware: the Mi-
crosoft XBox Case Study, AI Memo 2002-008, Mas-
sachusetts Institute of Technology, Artificial Intelli-
gence Laboratory. Technical report.
Jaber, C. (2011). High-Level SoC Modeling and
Performance Estimation Applied to a Multi-
SysML-Sec-AModelDrivenApproachforDesigningSafeandSecureSystems
663

CoreImplementation of LTE EnodeB Physical
Layer. PhD thesis, Telecom ParisTech.
Kelling, E., Friedewald, M., Leimbach, T., Menzel, M.,
S
¨
ager, P., Seudi
´
e, H., and Weyl, B. (2009). Specifica-
tion and Evaluation of e-Security Relevant Use cases.
Technical Report Deliverable D2.1, EVITA Project.
Knorreck, D., Apvrille, L., and De Saqui-Sannes, P. (2011).
TEPE: A SysML Language for Time-Constrained
Property Modeling and Formal Verification. ACM
SIGSOFT Software Engineering Notes, 36(1):1–8.
Leboudec, J. and Thiran, P. (2001). Network Calculus.
Springer Verlag LNCS volume 2050.
Maslennikov, D. (2010). Russian cybercriminals on the
move: profiting from mobile malware. In The 20th
Virus Bulletin Internation Conference, pages 84–89,
Vancouver, Canada.
Maynor, D. (2006). Scada security and terrorism:
We’re not crying wolf! In Invited presentation
at BlackHat BH 2006. Presentation available at:
https://www.blackhat.com/presentations/bh-federal-
06/BH-Fed-06-Maynor-Graham-up.pdf, USA.
Nhlabatsi, A., Nuseibeh, B., and Yu, Y. (2010). Security Re-
quirements Engineering for Evolving Software Sys-
tems: a survey. Technical Report 1, The Open Univer-
sity.
Nuseibeh, B. (2001). Weaving Together Requirements and
Architectures. IEEE Computer, 34(3):115–117.
OMG (2005). OMG Profile for Scheduling, Performance
and Time. In http://www.omg.org/spec/SPTP/.
OMG (2012). OMG Systems Modeling Language. In
http://www.sysml.org/specs/.
Pedroza, G. (2013). Assisting the design of secured appli-
cations for mobile vehicles. In Ph.D. of Ecole doctor-
ale informatique, t
´
el
´
ecommunications et
´
electronique
of Paris.
Pietre-Cambacedes, L. and Bouissou, M. (2013). Cross-
fertilization between safety and security engineering.
Rel. Eng. & Sys. Safety, 110:110–126.
Proofpoint (2014). Your Fridge is Full of
SPAM: Proof of An IoT-driven Attack. In
http://www.proofpoint.com/threatinsight/posts/your-
fridge-is-full-of-spam-proof-of-a-Iot-driven-
attack.php.
Raspotnig, C. and Opdahl, A. L. (2013). Comparing
risk identification techniques for safety and secu-
rity requirements. Journal of Systems and Software,
86(4):1124–1151.
Schneier, B. (1999). Attack Trees: Modeling Security
Threats.
Schweppe, H., Roudier, Y., Weyl, B., Apvrille, L., and
Scheuermann, D. (2011). C2X communication: Se-
curing the last meter. In The 4th IEEE International
Symposium on Wireless Vehicular Communications:
WIVEC2011, San Francisco, USA.
Teso, H. (2013). Aircraft Hacking. In HITB Security Con-
ference, Amsterdam, The Netherlands.
Van Lamsweerde, A. (2007). Engineering Requirements
for System Reliability and Security. Software System
Reliability and Security, 9:196–238.
Vidal, J., de Lamotte, F., Gogniat, G., Soulard, P., and
Diguet, J.-P. (2009). A Co-Design Approach for Em-
bedded System Modeling and Code Generation with
UML and MARTE. In Design, Automation and Test in
Europe Conference and Exhibition, 2009. DATE’09,
pages 226–231.
Waters, K. (2012). All About Agile: Agile Management
Made Easy! CreateSpace Independent Publishing
Platform.
MODELSWARD2015-3rdInternationalConferenceonModel-DrivenEngineeringandSoftwareDevelopment
664
