
Color Dog
Guiding the Global Illumination Estimation to Better Accuracy
Nikola Bani
´
c and Sven Lon
ˇ
cari
´
c
Image Processing Group, Department of Electronic Systems and Information Processing,
Faculty of Electrical Engineering and Computing, University of Zagreb, 10000 Zagreb, Croatia
Keywords:
Clustering, Color Constancy, Illumination Estimation, Image Enhancement, White Balancing.
Abstract:
An important part of image enhancement is color constancy, which aims to make image colors invariant to illu-
mination. In this paper the Color Dog (CD), a new learning-based global color constancy method is proposed.
Instead of providing one, it corrects the other methods’ illumination estimations by reducing their scattering
in the chromaticity space by using a its previously learning partition. The proposed method outperforms all
other methods on most high-quality benchmark datasets. The results are presented and discussed.
1 INTRODUCTION
Color constancy is the ability to recognize object col-
ors regardless of the scene illumination (Ebner, 2007).
Achieving it is often used as a pre-processing method
in image processing because depending on scene il-
lumination, the image colors may differ as shown in
Fig. 1. Two steps are needed to achieve computational
color constancy: illumination estimation, the essen-
tial step, and chromatic adaptation using the estima-
tion, a relatively easy step. Both steps often use the
following image f formation model, which includes
Lambertian assumption:
f
c
(x) =
Z
ω
I(λ, x)R(x, λ)ρ
c
(λ)dλ (1)
where c is a color channel, x is a given image pixel,
λ is the wavelength of the light, ω is the visible spec-
trum, I(λ, x) is the spectral distribution of the light
source, R(x, λ) is the surface reflectance and ρ
c
(λ) is
the camera sensitivity of the c-th color channel. With
uniform illumination assumed, x is removed from
I(λ, x) and the observed color of the light source e
is:
e =
e
R
e
G
e
B
=
Z
ω
I(λ)ρ(λ)dλ. (2)
For successful chromatic adaptation only the
direction of e is important and its amplitude can be
disregarded. As it is often the case that the values
of I(λ) and ρ
c
(λ) are unknown, calculating e is an
(a) (b)
Figure 1: The same scene (a) with and (b) without illumi-
nation color cast.
ill-posed problem and additional assumptions are
taken to solve it. This has resulted in many color
constancy methods that form at least two groups.
The first group is formed of low-level statistics-
based methods like White-patch (WP) (Land,
1977) and its improved version (Bani
´
c and
Lon
ˇ
cari
´
c, 2014b), Gray-world (GW) (Buchs-
baum, 1980), Shades-of-Gray (SoG) (Finlayson
and Trezzi, 2004), Grey-Edge (1st and 2nd order
(GE1 and GE2)) (Van De Weijer et al., 2007a),
Weighted Gray-Edge (Gijsenij et al., 2012), us-
ing bright pixels (BP) (Joze et al., 2012), Color
Sparrow (CS) (Bani
´
c and Lon
ˇ
cari
´
c, 2013), Color
Rabbit (CR) (Bani
´
c and Lon
ˇ
cari
´
c, 2014a), using color
distribution (CD) (Cheng et al., 2014b). The second
group is formed of learning-based methods like
gamut mapping (pixel, edge, and intersection based -
PG, EG, and IG) (Finlayson et al., 2006), using
neural networks (Cardei et al., 2002), using high-
level visual information (HLVI) (Van De Weijer et al.,
2007b), natural image statistics (NIS) (Gijsenij and
Gevers, 2007), Bayesian learning (BL) (Gehler et al.,
129
Banic N. and Loncaric S..
Color Dog - Guiding the Global Illumination Estimation to Better Accuracy.
DOI: 10.5220/0005307401290135
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 129-135
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
2008), spatio-spectral learning (maximum likelihood
estimate (SL) and with gen. prior (GP)) (Chakrabarti
et al., 2012), exemplar-based learning (EB) (Joze and
Drew, 2012), Color Cat (CC) (Bani
´
c and Lon
ˇ
cari
´
c,
2015). In devices with limited computation power
like digital cameras, faster low-level statistics-based
methods are used (Deng et al., 2011) because the
more accurate learning-based methods are slower.
Recently, a new learning-based method using the
illumination statistics has been proposed (Zhang and
Batur, 2014), which limits the possible values of e
to only a set of illuminations. The most appropri-
ate illumination for a given image is then selected by
means of a classifier that uses the image chromatic-
ity histogram bin values as features. In this paper a
new method is proposed, which also selects the most
appropriate illumination from a set of illuminations,
but the approach is significantly different. The selec-
tion is performed by a voting procedure, which uses
the illumination estimations of other existing meth-
ods. The selected illumination can be interpreted as
the correction of used initial illumination estimation.
With this correction the very fast, but less accurate
statistics-based methods can simply be improved to
outperform most of the other state-of-the-art methods
in terms of accuracy. At the same time the accuracy
of already accurate methods is improved even further.
The paper is structured as follows: In Section II
the proposed method is described and in Section III it
is tested and the results are presented and discussed.
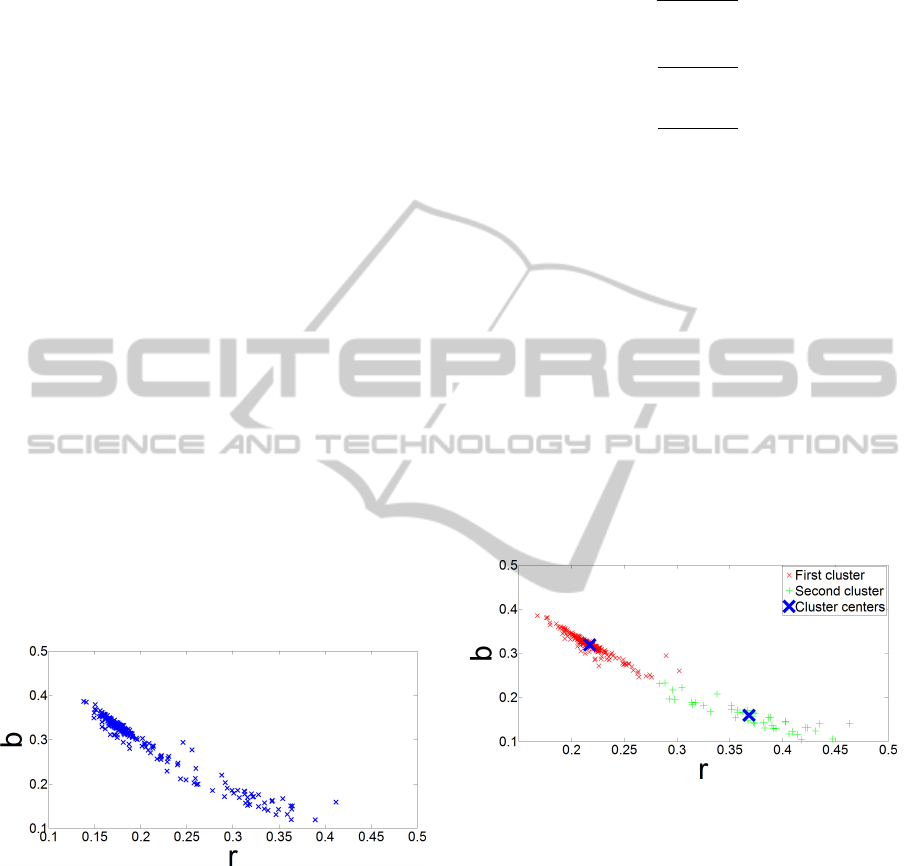
Figure 2: The rb-chromaticities of the Sony dataset (Cheng
et al., 2014b) ground-truth illuminations.
2 THE PROPOSED METHOD
2.1 Motivation
Since it is only the direction of the observed light
source e that matters, chromaticity can be used to
describe illumination. The rgb chromaticity compo-
nents of a color described by its RGB components are
calculated by scaling the RGB components so that the
equation r + g + b = 1 holds:
r =
R
R +G +B
, (3)
g =
G
R +G +B
, (4)
b =
B
R +G +B
. (5)
Each estimation of e can result in various values.
Fig. 2 shows the ground-truth illumination chromatic-
ities for the Sony dataset (Cheng et al., 2014b). It
can be seen that there is a certain regularity that can
also be seen for any other benchmark dataset. This
has been used in (Zhang and Batur, 2014) where the
ground-truth illumination chromaticities are clustered
by performing the k-means clustering (Vassilvitskii
and University, 2007) to obtain the cluster centers,
which are used to sparsely represent the possible illu-
mination values. For a given image the cluster center
that most appropriately approximates the image scene
illumination is chosen by using the image chromatic-
ity histogram and a machine learning algorithm. In
this way the problem of illumination estimation is sig-
nificantly simplified by transforming it into classifica-
tion problem.
Figure 3: The Canon1 dataset (Cheng et al., 2014b) ground-
truth illumination clustering example.
Fig. 3 shows a possible clustering of the Canon1
dataset (Cheng et al., 2014b) ground-truth illumi-
nations. Since the illumination chromaticities are
densely placed together, representing any of them
with one member of a well chosen small set of illu-
mination chromaticities results in only a small error
and consequently in a good approximation. This was
done in (Zhang and Batur, 2014), but the method de-
scribed there is a learning-based method that is not
very appropriate for devices with limited computa-
tional power.
As seen in Fig. 4, the illumination estimations
chromaticities of White-patch and Gray-world are
scattered around the ground-truth illumination chro-
maticities. Similar arrangements can be observed for
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
130
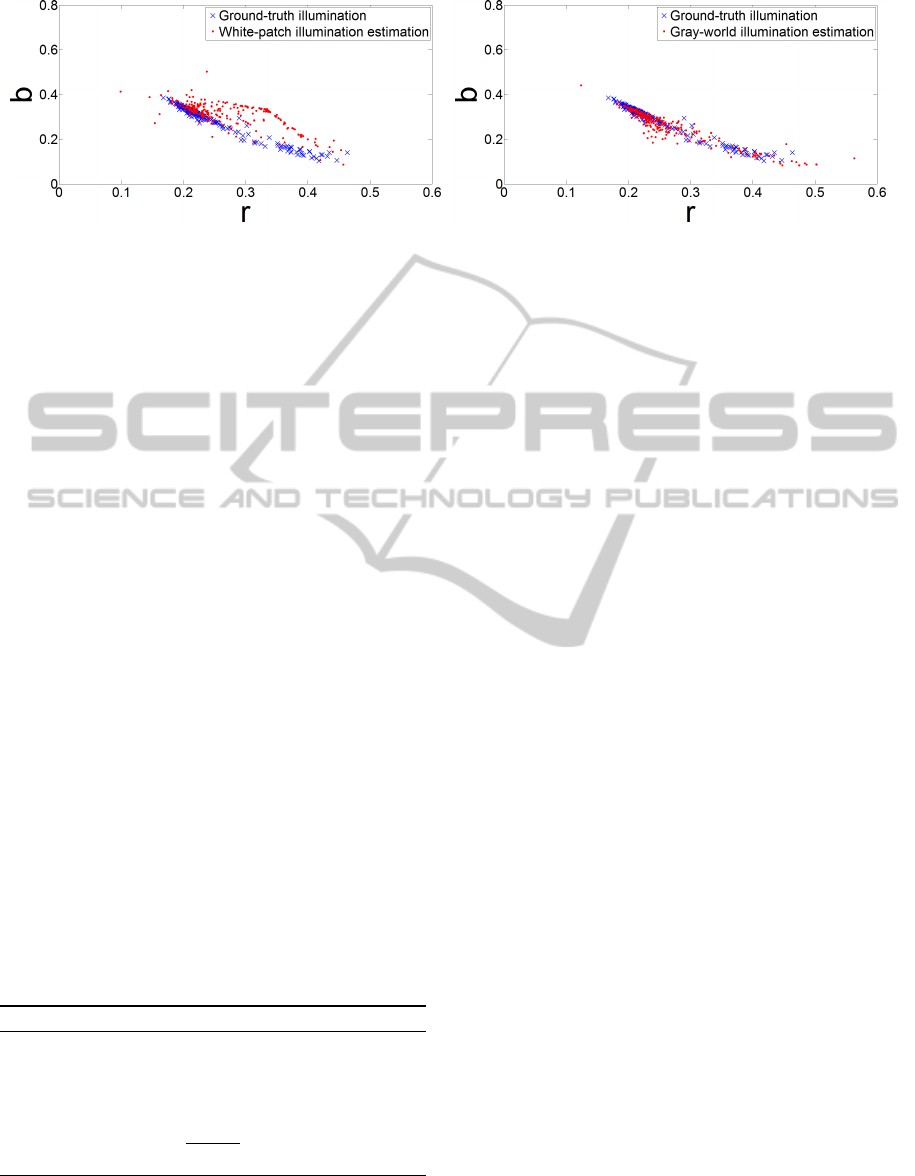
(a) (b)
Figure 4: The illumination estimation rb-chromaticities on the Canon1 dataset (Cheng et al., 2014b) for (a) White-patch and
(b) Gray-world method.
other methods as well. Such arrangements lead to the
motivation of trying to correct the methods’ illumina-
tion estimations by getting their chromaticities closer
to the region occupied by the ground-truth illumina-
tion chromaticities.
2.2 Realisation
Instead of performing classification by extracting fea-
tures and applying a machine learning algorithm, we
propose a method that chooses the most appropriate
center by performing a voting where the voters are
some existing illumination estimation methods that
cast a vote of different strength for each of the avail-
able centers. Since both the methods’ illumination
estimations and the centers are vectors, the vote that
each of the used methods casts for each of the cen-
ters can be defined as the cosine of the angle between
the center and the method’s illumination estimation.
The center with the maximum sum of the votes is the
proposed method’s illumination estimation.
Since dogs are known for their leading abilities
and the proposed method leads the voters’ illumina-
tion estimations to higher accuracy, it was named the
Color Dog (CD). The pseudocode for the application
phase of the Color Dog method is given in Algo-
rithm 1. An example of Color Dog correction with
only one voter is shown in Fig. 5.
Algorithm 1: Color Dog Application.
1: I = GetImage()
2: for all voter
i
∈ {voter
1
, ..., voter
n
} do
3: e
i
= voter
i
.EstimateIllumination(I)
4: end for
5: e = argmax
c∈centers
∑
n
i=1
c·e
i
||c||·||e
i
||
The voters are chosen by considering where the
illumination estimation is to be applied. on digital
cameras it might be better to use statistics-based vot-
ers since they are fast. If speed is not critical, then cor-
rection the illumination estimation of learning-based
methods might result in an even higher accuracy. If
the Color Dog uses used voters v
1
, v
2
, ..., v
n
, then this
the notated as CD
v
1
,v
2
,...,v
n
.
In addition to any parameters of the voter meth-
ods, the center positions also need to be learned.
This is done by performing k-means algorithm on the
ground-truth illuminations of the learning set. Addi-
tionally, what also needs to be determined is the num-
ber of centers, which is a hyperparameter and each
value represents a different model. More centers re-
sult in a more accurate chromaticity space represen-
tation and a harder classification problem, so the op-
timal number of centers has to be chosen carefully.
This is done in the model selection process (Japkow-
icz and Shah, 2011), which conducts a grid search
guided by cross-validating the proposed method for
a given number of centers. At the end the selected
model i.e. number of centers is the one that resulted
in the lowest generalization error.
3 EXPERIMENTAL RESULTS
3.1 Benchmark Datasets
Since the image formation model used in Eq. (1) is
linear and in digital cameras color constancy methods
are implemented to work on linear images (Gijsenij
et al., 2011), datasets with linear image were used to
test the accuracy of the proposed method in such en-
vironments. Until recently the only publicly available
and well-known raw-based dataset with linear im-
ages was the Shi’s and Funt’s re-processed linear ver-
sion (L. Shi, 2014) of the ColorChecker dataset (Gi-
jsenij and Gevers, 2007). However, in most publi-
cations this dataset was used without subtracting the
black level (Lynch et al., 2013), which led to wrong
ColorDog-GuidingtheGlobalIlluminationEstimationtoBetterAccuracy
131
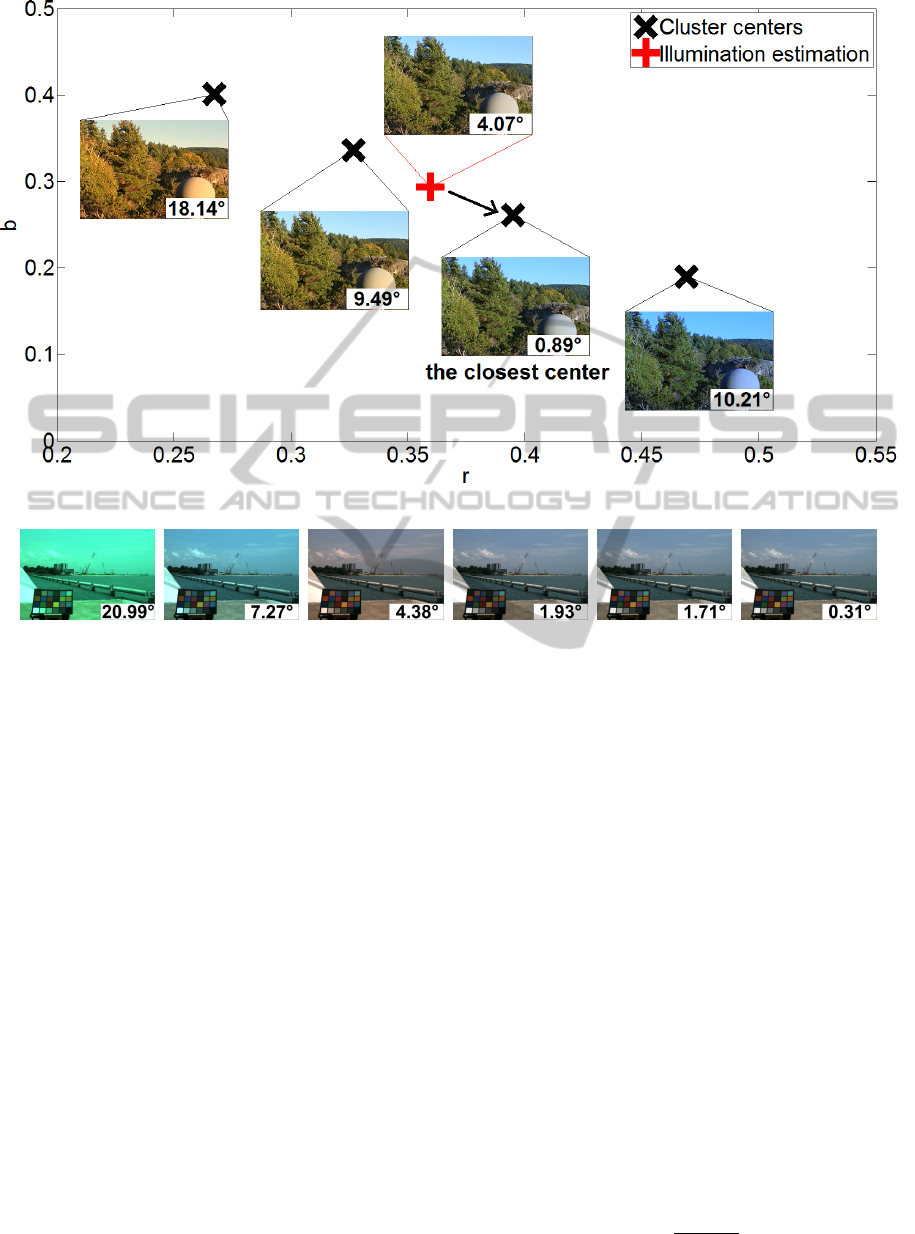
Figure 5: Example of the Color Dog method with one voter choosing the closest center.
(a) (b) (c) (d) (e) (f)
Figure 6: Example of chromatic adaptation based on the methods’ illumination estimation and respective illumination esti-
mation errors: (a) do nothing, (b) White-patch, (c) Gray-world, (d) Color Distribution, (e) Color Rabbit), and (f) proposed
method.
estimations. Since this might lead to certain com-
parison problems, the linear ColorChecker was not
used. Instead the nine new NUS datasets (Cheng
et al., 2014b) were used. Images of these datasets are
of high-quality and each dataset corresponds to a dif-
ferent camera. In addition to these datasets, the non-
linear GreyBall dataset (Ciurea and Funt, 2003) and
its approximated linear version were used because
they are the largest available benchmark datasets.
In the scene of each image is a calibration ob-
ject used to extract the ground-truth illumination of
the scene. When an illumination estimation method
is applied to the image, the calibration object is first
masked out in order to avoid bias. After the illumi-
nation estimation is performed, the angle between the
resulting vector and the ground-truth vector is calcu-
lated and used as the error measure i.e. as angular er-
ror. The commonly used statistics descriptor used to
describe a method’s performance on a dataset is the
median of per image angular error (Hordley and Fin-
layson, 2004). The mean is less important because
the angular error distribution is in many cases non-
symmetric.
3.2 Used Voters
Because speed is a desirable feature of illumination
estimation methods, especially for real-time embed-
ded system implementations, one of the tested Color
Dog voter method sets contained two of the sim-
plest methods that have no parameters: White-patch
and Gray-world method. They are very fast, but not
very accurate and any improvement of their accuracy
is significant. White-patch illumination estimation
looks like this:
e
wp
=
max f
R
max f
G
max f
B
, (6)
but for better performance, clipped pixels should be
excluded from the maxima calculation (Funt and Shi,
2010). Gray-world illumination estimation is per-
formed in the following way:
e
gw
=
R
f(x)dx
R
dx
. (7)
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
132
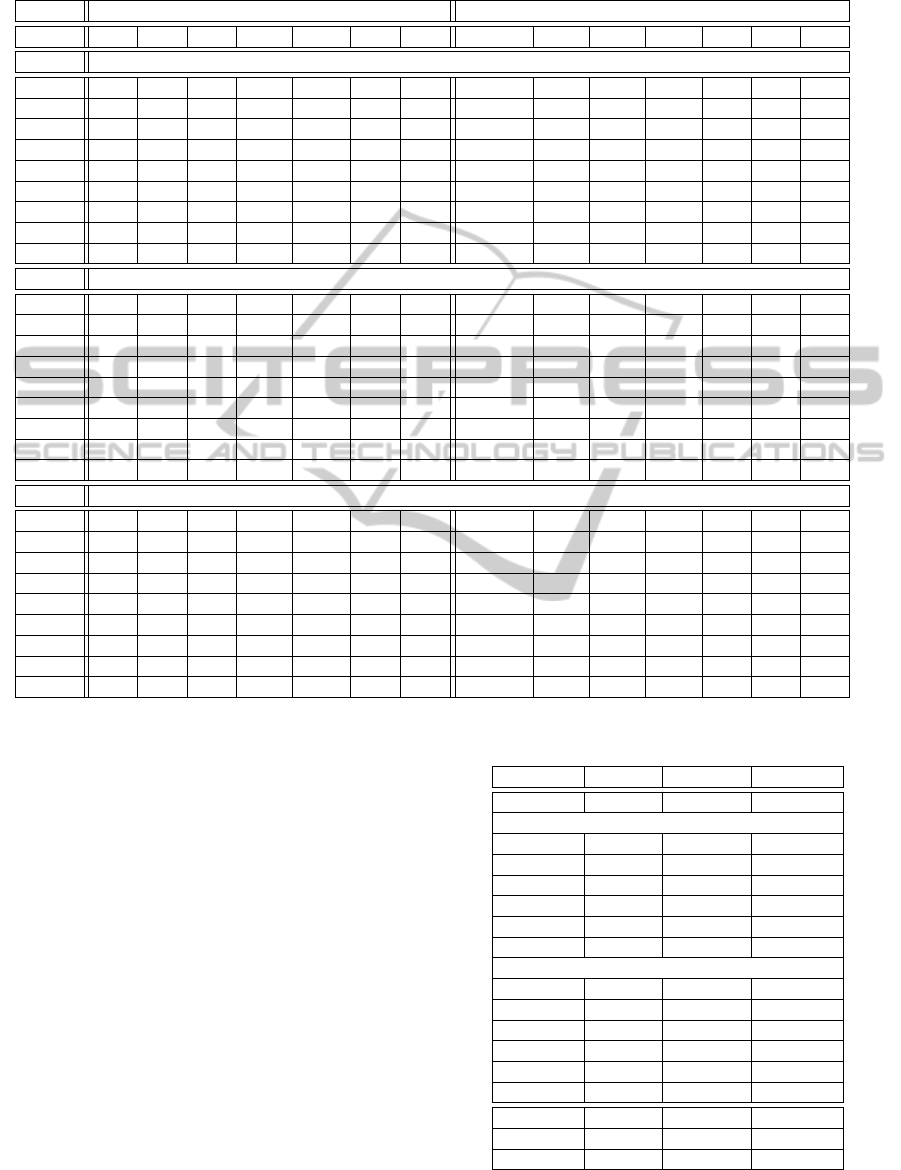
Table 1: Angular error of selected low-level statistics-based methods, the proposed method, and selected learning-based
methods on nine NUS benchmark image databases (lower is better).
Low-level statistics-based methods Learning-based methods
Method CR CD GW WP GGW GE1 GE2 CD
GW,W P
PG EG IG ML GP NIS
Dataset Mean angular error (
◦
)
Canon1 3.09 2.93 5.16 7.99 3.16 3.45 3.47 3.13 6.13 6.07 6.37 3.58 3.21 4.18
Canon2 2.81 2.81 3.89 10.96 3.24 3.22 3.21 2.83 14.51 15.36 14.46 2.80 2.67 3.43
Fuji 2.94 3.15 4.16 10.20 3.42 3.13 3.12 3.36 8.59 7.76 6.80 3.12 2.99 4.05
Nikon1 3.06 2.90 4.38 11.64 3.26 3.37 3.47 3.19 10.14 13.00 9.67 3.22 3.15 4.10
Oly 2.65 2.76 3.44 9.78 3.08 3.02 2.84 2.57 6.52 13.20 6.21 2.92 2.86 3.22
Pan 2.89 2.96 3.82 13.41 3.12 2.99 2.99 2.84 6.00 5.78 5.28 2.93 2.85 3.70
Sam 2.94 2.91 3.90 11.97 3.22 3.09 3.18 2.92 7.74 8.06 6.80 3.11 2.94 3.66
Sony 2.88 2.93 4.59 9.91 3.20 3.35 3.36 2.83 5.27 4.40 5.32 3.24 3.06 3.45
Nikon2 3.57 3.81 4.60 12.75 4.04 3.94 3.95 3.37 11.27 12.17 11.27 3.80 3.59 4.36
Dataset Median angular error (
◦
)
Canon1 2.08 2.01 4.15 6.19 2.35 2.48 2.44 1.72 4.30 4.68 4.72 2.80 2.67 3.04
Canon2 1.86 1.89 2.88 12.44 2.28 2.07 2.29 1.85 14.83 15.92 14.72 2.32 2.03 2.46
Fuji 1.84 2.15 3.30 10.59 2.60 1.99 2.00 1.81 8.87 8.02 5.90 2.70 2.45 2.95
Nikon1 1.91 2.08 3.39 11.67 2.31 2.22 2.19 1.94 10.32 12.24 9.24 2.43 2.26 2.40
Oly 1.79 1.87 2.58 9.50 2.15 2.11 2.18 1.46 4.39 8.55 4.11 2.24 2.21 2.17
Pan 1.70 2.02 3.06 18.00 2.23 2.16 2.04 1.69 4.74 4.85 4.23 2.28 2.22 2.28
Sam 1.88 2.03 3.00 12.99 2.57 2.23 2.32 1.89 7.91 6.12 6.37 2.51 2.29 2.77
Sony 2.10 2.33 3.46 7.44 2.56 2.58 2.70 1.77 4.26 3.30 3.81 2.70 2.58 2.88
Nikon2 2.42 2.72 3.44 15.32 2.92 2.99 2.95 2.12 10.99 11.64 11.32 2.99 2.89 3.51
Dataset Trimean angular error (
◦
)
Canon1 2.56 2.22 4.46 6.98 2.50 2.74 2.70 2.08 4.81 4.87 5.13 2.97 2.79 3.30
Canon2 2.17 2.12 3.07 11.40 2.41 2.36 2.37 2.07 14.78 15.73 14.80 2.37 2.18 2.72
Fuji 2.13 2.41 3.40 10.25 2.72 2.26 2.27 2.20 8.64 7.70 6.19 2.69 2.55 3.06
Nikon1 2.23 2.19 3.59 11.53 2.49 2.52 2.58 2.14 10.25 11.75 9.35 2.59 2.49 2.77
Oly 2.01 2.05 2.73 9.54 2.35 2.26 2.20 1.72 4.79 10.88 4.63 2.34 2.28 2.42
Pan 2.12 2.31 3.15 14.98 2.45 2.25 2.26 1.87 4.98 5.09 4.49 2.44 2.37 2.67
Sam 2.18 2.22 3.15 12.45 2.66 2.32 2.41 2.05 7.70 6.56 6.40 2.63 2.44 2.94
Sony 2.26 2.42 3.81 8.78 2.68 2.76 2.80 2.03 4.45 3.45 4.13 2.82 2.74 2.95
Nikon2 2.67 3.10 3.69 13.80 3.22 3.21 3.38 2.38 11.11 12.01 11.30 3.11 2.96 3.84
The described combination of the voters CD
W P,GW
was tested on all used datasets with the goal of exam-
ining how much can the accuracy of some of the sim-
plest and least accurate methods be improved with the
computational cost almost intact. For the challenging
GreyBall dataset the combinations CD
EB
and CD
CC
were also tested where the voter methods described
in (Joze and Drew, 2012) and (Bani
´
c and Lon
ˇ
cari
´
c,
2015) were used to examine if the accuracy of already
successful methods can be improved even further.
3.3 Accuracy
Table 1 shows the error statistics achieved on the
NUS datasets, Table 2 on the original GreyBall
dataset, and Table 3 on its linear version. The re-
sults for other methods were taken from (Cheng et al.,
2014b) (Cheng et al., 2014a) (A. Gijsenij and van de
Weijer, 2014). Because the proposed method is a
learning one, like for other learning-based methods
the 3-fold cross-validation was used on the NUS
Table 2: Performance of different color constancy methods
on the original GreyBall dataset (lower is better).
method mean (
◦
) median (
◦
) trimean (
◦
)
do nothing 8.28 6.70 7.25
Low-level statistics-based methods
GW 7.87 6.97 7.14
WP 6.80 5.30 5.77
SoG 6.14 5.33 5.51
general GW 6.14 5.33 5.51
GE1 5.88 4.65 5.11
GE2 6.10 4.85 5.28
Learning-based methods
PG 7.07 5.81 6.12
EG 6.81 5.81 6.03
IG 6.93 5.80 6.05
NIS 5.19 3.93 4.31
EB 4.38 3.43 3.67
CC 4.22 3.17 3.46
CD
W P,GW
5.27 3.71 4.16
CD
EB
4.68 3.11 3.72
CD
CC
4.50 2.86 3.50
ColorDog-GuidingtheGlobalIlluminationEstimationtoBetterAccuracy
133
Table 3: Performance of different color constancy methods
on the linear GreyBall dataset (lower is better).
method mean (
◦
) median (
◦
) trimean (
◦
)
do nothing 15.62 14.00 14.56
Low-level statistics-based methods
GW 13.01 10.96 11.53
WP 12.68 10.50 11.25
SoG 11.55 9.70 10.23
general GW 11.55 9.70 10.23
GE1 10.58 8.84 9.18
GE2 10.68 9.02 9.40
Learning-based methods
PG 11.79 8.88 9.97
EG 12.78 10.88 11.38
IG 11.81 8.93 10.00
HVLI 9.73 7.71 8.17
NIS 9.87 7.65 8.29
EB 7.97 6.46 6.77
CC 8.73 7.07 7.43
CD
W P,GW
10.27 7.33 8.20
CD
EB
8.46 5.63 6.73
CD
CC
8.79 5.66 6.89
datasets. On the GreyBall dataset the 15-fold cross-
validation was used with the folds provided by the
authors. In the loop performing the cross-validation
there was another cross-validation to determine the
optimal number of centers so that the whole testing
was performed using a nested cross-validation.
For the most of the NUS datasets the proposed
CD
W P,GW
outperforms all other methods in terms of
median angular error, which is a significant result.
Since the median angular error is for all NUS datasets
below 3
◦
, which was experimentally shown to be
an acceptable error for human observers (Finlayson
et al., 2005) (Fredembach and Finlayson, 2008), the
results of CD
W P,GW
are in most cases satisfying.
Fig. 6 shows the results of chromatic adaptation based
on illumination estimation of several methods on the
NUS datasets. Beyond the fact that the CD
W P,GW
, it
also demonstrates how even very simple statistics of
a realistic illumination distribution can significantly
improve the initially low accuracy of simple methods
up to the level to outperform state-of-the-art methods
in most cases.
For the GreyBall dataset and its linear version
CD
W P,GW
outperformed all statistics-based methods
and compared very well with the learning-based ones
being less accurate than only a small number of them.
The other tested combination CD
EB
outperformed all
other methods in terms of median angular error prov-
ing that already accurate methods can have their ac-
curacy improved even further in a simple way.
3.4 Computational Speed
Since the computation cost of voting is negligible,
the computational cost the Color Dog depends only
on the combined computational costs of its voters.
According to the tests performed in (Cheng et al.,
2014b) White-patch and Gray-world method are the
two fastest methods and even their combined compu-
tation time is low, so CD
W P,GW
is not only accurate,
but also a fast method suitable for implementation in
digital cameras with limited computational power.
4 CONCLUSIONS AND FUTURE
RESEARCH
A new global illumination estimation learning-based
methods has been proposed. It uses other methods’ il-
lumination estimations to vote for the most appropri-
ate illumination from a predefined set with almost no
additional computational cost. The method demon-
strates how even some of the least accurate meth-
ods can be improved up to the level of outperform-
ing most of the other methods while at the same time
keeping their advantages. It also demonstrates that
the accuracy of already very accurate methods can
be improved even further. In future some more so-
phisticated and accurate voting methods should be re-
searched.
ACKNOWLEDGEMENTS
This research has been partially supported by the Eu-
ropean Union from the European Regional Develop-
ment Fund by the project IPA2007/HR/16IPO/001-
040514 ”VISTA - Computer Vision Innovations for
Safe Traffic.”
REFERENCES
A. Gijsenij, T. G. and van de Weijer, J. (2014). Color Con-
stancy — Research Website on Illuminant Estimation.
Bani
´
c, N. and Lon
ˇ
cari
´
c, S. (2013). Using the Random
Sprays Retinex Algorithm for Global Illumination Es-
timation. In Proceedings of The Second Croatian
Computer Vision Workshop (CCVW 2013), pages 3–7.
University of Zagreb Faculty of Electrical Engineer-
ing and Computing.
Bani
´
c, N. and Lon
ˇ
cari
´
c, S. (2014a). Color Rabbit: Guid-
ing the Distance of Local Maximums in Illumina-
tion Estimation. In Digital Signal Processing (DSP),
2014 19th International Conference on, pages 345–
350. IEEE.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
134

Bani
´
c, N. and Lon
ˇ
cari
´
c, S. (2014b). Improving the White
patch method by subsampling. In Image Processing
(ICIP), 2014 21st IEEE International Conference on,
pages 605–609. IEEE.
Bani
´
c, N. and Lon
ˇ
cari
´
c, S. (2015). Color Cat: Remember-
ing Colors for Illumination Estimation. Signal Pro-
cessing Letters, IEEE, 22(6):651–655.
Buchsbaum, G. (1980). A spatial processor model for object
colour perception. Journal of The Franklin Institute,
310(1):1–26.
Cardei, V. C., Funt, B., and Barnard, K. (2002). Estimating
the scene illumination chromaticity by using a neural
network. Journal of the Optical Society of America A,
19(12):2374–2386.
Chakrabarti, A., Hirakawa, K., and Zickler, T. (2012). Color
constancy with spatio-spectral statistics. Pattern Anal-
ysis and Machine Intelligence, IEEE Transactions on,
34(8):1509–1519.
Cheng, D., Prasad, D., and Brown, M. S. (2014a). On Illu-
minant Detection.
Cheng, D., Prasad, D. K., and Brown, M. S. (2014b). Il-
luminant estimation for color constancy: why spatial-
domain methods work and the role of the color distri-
bution. Journal of the Optical Society of America A,
31(5):1049–1058.
Ciurea, F. and Funt, B. (2003). A large image database
for color constancy research. In Color and Imaging
Conference, volume 2003, pages 160–164. Society for
Imaging Science and Technology.
Deng, Z., Gijsenij, A., and Zhang, J. (2011). Source camera
identification using Auto-White Balance approxima-
tion. In Computer Vision (ICCV), 2011 IEEE Interna-
tional Conference on, pages 57–64. IEEE.
Ebner, M. (2007). Color Constancy. The Wiley-IS&T Se-
ries in Imaging Science and Technology. Wiley.
Finlayson, G. D., Hordley, S. D., and Morovic, P. (2005).
Colour constancy using the chromagenic constraint.
In Computer Vision and Pattern Recognition, 2005.
CVPR 2005. IEEE Computer Society Conference on,
volume 1, pages 1079–1086. IEEE.
Finlayson, G. D., Hordley, S. D., and Tastl, I. (2006). Gamut
constrained illuminant estimation. International Jour-
nal of Computer Vision, 67(1):93–109.
Finlayson, G. D. and Trezzi, E. (2004). Shades of gray and
colour constancy. In Color and Imaging Conference,
volume 2004, pages 37–41. Society for Imaging Sci-
ence and Technology.
Fredembach, C. and Finlayson, G. (2008). Bright chroma-
genic algorithm for illuminant estimation. Journal of
Imaging Science and Technology, 52(4):40906–1.
Funt, B. and Shi, L. (2010). The rehabilitation of MaxRGB.
In Color and Imaging Conference, volume 2010,
pages 256–259. Society for Imaging Science and
Technology.
Gehler, P. V., Rother, C., Blake, A., Minka, T., and Sharp, T.
(2008). Bayesian color constancy revisited. In Com-
puter Vision and Pattern Recognition, 2008. CVPR
2008. IEEE Conference on, pages 1–8. IEEE.
Gijsenij, A. and Gevers, T. (2007). Color Constancy us-
ing Natural Image Statistics. In Computer Vision and
Pattern Recognition, 2008. CVPR 2008. IEEE Confer-
ence on, pages 1–8.
Gijsenij, A., Gevers, T., and Van De Weijer, J. (2011).
Computational color constancy: Survey and exper-
iments. Image Processing, IEEE Transactions on,
20(9):2475–2489.
Gijsenij, A., Gevers, T., and Van De Weijer, J. (2012). Im-
proving color constancy by photometric edge weight-
ing. Pattern Analysis and Machine Intelligence, IEEE
Transactions on, 34(5):918–929.
Hordley, S. D. and Finlayson, G. D. (2004). Re-evaluating
colour constancy algorithms. In Pattern Recognition,
2004. ICPR 2004. Proceedings of the 17th Interna-
tional Conference on, volume 1, pages 76–79. IEEE.
Japkowicz, N. and Shah, M. (2011). Evaluating Learning
Algorithms. Cambridge University Press.
Joze, H. R. V. and Drew, M. S. (2012). Exemplar-Based
Colour Constancy. In British Machine Vision Confer-
ence, pages 1–12.
Joze, H. R. V., Drew, M. S., Finlayson, G. D., and Rey, P.
A. T. (2012). The Role of Bright Pixels in Illumina-
tion Estimation. In Color and Imaging Conference,
volume 2012, pages 41–46. Society for Imaging Sci-
ence and Technology.
L. Shi, B. F. (2014). Re-processed Version of the Gehler
Color Constancy Dataset of 568 Images.
Land, E. H. (1977). The retinex theory of color vision. Sci-
entific America.
Lynch, S. E., Drew, M. S., and Finlayson, k. G. D. (2013).
Colour Constancy from Both Sides of the Shadow
Edge. In Color and Photometry in Computer Vision
Workshop at the International Conference on Com-
puter Vision. IEEE.
Van De Weijer, J., Gevers, T., and Gijsenij, A. (2007a).
Edge-based color constancy. Image Processing, IEEE
Transactions on, 16(9):2207–2214.
Van De Weijer, J., Schmid, C., and Verbeek, J. (2007b). Us-
ing high-level visual information for color constancy.
In Computer Vision, 2007. ICCV 2007. IEEE 11th In-
ternational Conference on, pages 1–8. IEEE.
Vassilvitskii, S. and University, S. (2007). K-means: Algo-
rithms, Analyses, Experiments. Stanford University.
Zhang, B. and Batur, A. (2014). Illumination Estima-
tion Using Natural Scene Statistics. US Patent App.
14/188,670.
ColorDog-GuidingtheGlobalIlluminationEstimationtoBetterAccuracy
135
