
Conics Detection Method based on Pascal’s Theorem
Musfequs Salehin, Lihong Zheng and Junbin Gao
School of Computing & Mathematics, Charles Sturt University, Wagga Wagga, Australia
Keywords: Conics Detection, Pascal’s Theorem, Ellipse Detection, Parabola Detection.
Abstract: This paper presents a novel conics detection method that can be applied for real images. The existing
methods usually detect either circular or elliptical, or parabolic shape at one operation. Most of them need
the information about center, radius, major axis, minor axis, vertex, and more. In our proposed method, the
tangents on curve segments, conic parts, and conics are constructed using Pascal’s theorem. The conic parts
can be used to detect different types of conic sections from an image. The performance of the proposed
method has been tested on the sample images selected from Caltech-256 database and various types of conic
sections can be identified from the real images compared to other method.
1 INTRODUCTION
Conics are the curves formed by the intersection of a
plane with a right circular cone. They include
circles, ellipses, parabolas, and hyperbolas. Among
conics, the most common geometric shapes are
circles, ellipses, and parabolas to present various
conic shaped objects for detection in computer
vision. Many traditional methods can detect only
circles or ellipses, or parabolas individually. Though
such methods are robust to noise and show good
performance, it is hard to find an existing method
that can detect all types of conic shaped objects in a
single operation. Again, conics detection from an
image is still a very challenging problem due to
various reasons. Not every edges of an image are
smooth and clear. Some edges might be blurry and
disconnected due to reflections or varied
illumination. In addition to this, object contours may
be distracted in the presence of clatters, occlusion,
and perspective errors. Consequently, in most of
these cases, the conic shape of a desired object is
distorted, disconnected, or even overlapped by other
objects.
In this paper, we aim at detecting conic shaped
edges in an image based on Pascal’s theorem.
Firstly, we apply Triangular Area Ratio (TAR)
(Alajlan et al. 2007) to break each edge contour into
two or more segments based on sharp turns or
inflection points. Secondly, we calculate two
tangents at two ending points of a curve segment
using Pascal’s theorem (Coxeter & Greitzer 1967).
From the two tangents, conic part is constructed and
fitted with edge segments using least squares fitting
method. Lastly, the validated edge segments are
grouped together to match the conic shaped object in
an image. We apply Pascal’s theorem to detect
conics in the image. Our contribution is that the
proposed method does not need to calculate the
center, major axis, or minor axis to detect conic
shaped object. Simply, it identifies conic shaped
object by verifying the best matching between conic
shaped object and grouped edge segments.
The organization of this paper is as follows. The
background of conics detection is presented in
Section 2. The proposed approach is discussed in
Section 3; the visual results are displayed in Section
4. Lastly, we conclude the paper in Section 5.
2 BACKGROUND
Conics detection from an image is an important and
recurring research problem. Various methods for the
detection or fitting of different types of conics have
been developed in the last few decades. These
algorithms can be categorized into three main
approaches. They are (1) Hough Transform (HT)
based approaches, (2) optimization based
approaches and (3) edge following based
approaches.
In general, Hough Transform based method is a
standard technique for detecting any parameterized
curve. One of the key advantages of HT based
491
Salehin M., Zheng L. and Gao J..
Conics Detection Method based on Pascal’s Theorem.
DOI: 10.5220/0005299804910497
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 491-497
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

method is that it can detect fragmented ellipses. The
reason of this is that, it does not require the edge
pixels to be connected consecutively on the ellipse.
This method maps two dimensional image space into
the higher dimensional parameter space. For
example, an ellipse can be defined by five
parameters, such as its center (c
x
, c
y
), the major axis
a, the minor axis b, and the orientation θ. Therefore,
O(N
5
) space is required for an ellipse to accumulate
the parameter space, where N is the size of each
dimension of the parameter space. As a result, this is
a combinatory complexity. Moreover, in the basic
HT based method, the accumulator’s bin sizes are
determined by “windowing and sampling the
parameter space in a heuristic way” (Xu et al. 1990).
However, a large window size is necessary to detect
curves from the image with different sizes and a
high dimensional parameter space to increase
accuracy. Again, these obviously lead to large
storage and more processing time. Additionally, in
case of poorly defined accumulator, (Xu et al. 1990)
identified four difficulties may occur, such as (a)
problems in finding an optimal local maxima, (b)
low precision, (c) large storage, and (d) low speed.
For example, coarse quantization may have poor
influence on accurate ellipse detection while fine
quantization may lead to missing the true ellipses.
Besides this, the accuracy of HT decreases at the
increased number of ellipses in an image
(McLaughlin 2000).
Optimization based approaches include Genetic
Algorithms (GA), Least Squares Fitting (LSF)
method, or Robust Regression (RR) based approach
for ellipse detection. GA based methods represent
each potential solution as a chromosome and the
population of chromosomes are generated
iteratively. This process terminates when some
predefined conditions are satisfied. However,
finding the best possible evaluation criteria and
thresholds for fitness function are often very hard
(Qiao & Ong 2007). Both LSF and RR methods
extract ellipse by optimizing an objective function to
fit edge pixels to a standard ellipse. However, in
presence of outliers, these methods may produce
false or missing detection (Qiao & Ong 2007).
Edge following based approaches extract some
arc fragments and group them together based on
geometric properties of ellipse. Recently, a method
for ellipse detection based on edge following is
proposed by (Chia & Rahardja 2011). In their
method, line segments are formed from the edge
map and elliptical-arcs are constructed from these
line segments. These arcs are then grouped to form
ellipses and false ellipses are neglected by the
developed feedback loop method. This method
performs very well both in synthetic as well as in
real-world images. However, it is computationally
very expensive (Wong & Lin 2012).
Another edge following method for ellipse
detection is proposed by (Prasad et al. 2012). This
method uses edge curvature and convexity instead of
continuity as a constraint for the ellipse detection.
Hough Transform is then applied to assign a
relationship score to the edge contours for grouping.
Three robust non-heuristic saliency criteria are used
for generating the good elliptic hypotheses. This
method does not require any threshold or control
parameter. Although this method achieves a high
accuracy, it is also very time consuming in the
presence of outliers and it often provides false or
missing detection (Akinlar & Topal 2013).
Akinlar and Topal proposed a real-time and
parameter free method (Akinlar & Topal 2013) to
detect both circles and near-circular ellipses. This
algorithm first extracts edge segments from a given
image by implementing Edge Drawing Parameter
Free (EDPF) edge detector. The detected edge
segments are converted into line segments. Circular
arcs are then detected from these line segments
based on line direction and angle between two lines.
Candidate circles and near-circular ellipses are
detected based on the constraint of center distance
and radius difference with the root mean square
error. Finally, the candidates are validated using
Helmholtz principle (Akinlar & Topal 2013).
However, its success depends on the accurate edges
detected by EDPF and the presence of noise in the
image (Akinlar & Topal 2013).
In this paper, we propose a novel method based
on the edge following method. We extract edge or
part of edge that can be a part of a conic section. To
construct the conic part by Pascal’s theorem, two
tangents, and a point on the curve are required. We
construct tangent using the theorem proposed by
Pascal (Coxeter & Greitzer 1967). Instead of
applying LSF method or HT-based method for
detecting circle or ellipse or parabola, we apply
Pascal’s theorem for detecting different types of
conic sections. Method based on LSF is designed for
detecting only one specific type of conic section at a
time. For example, LSF method proposed for
detecting for circle cannot detect parabola and vice-
versa. In contrast, our method based on Pascal’s
theorem can detect any sorts of conics. Again, for
grouping edge fragments to construct conics, we
apply conic part construction method by Pascal
theorem.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
492
Thus, the contributions of the proposed method
are listed below:
1. A novel technique for detecting conic part
using Pascal’s theorem
2. A novel method for constructing tangent on a
curve using the theorem proposed by Pascal
3. A novel approach for grouping edge fragments.
3 THE PROPOSED METHOD
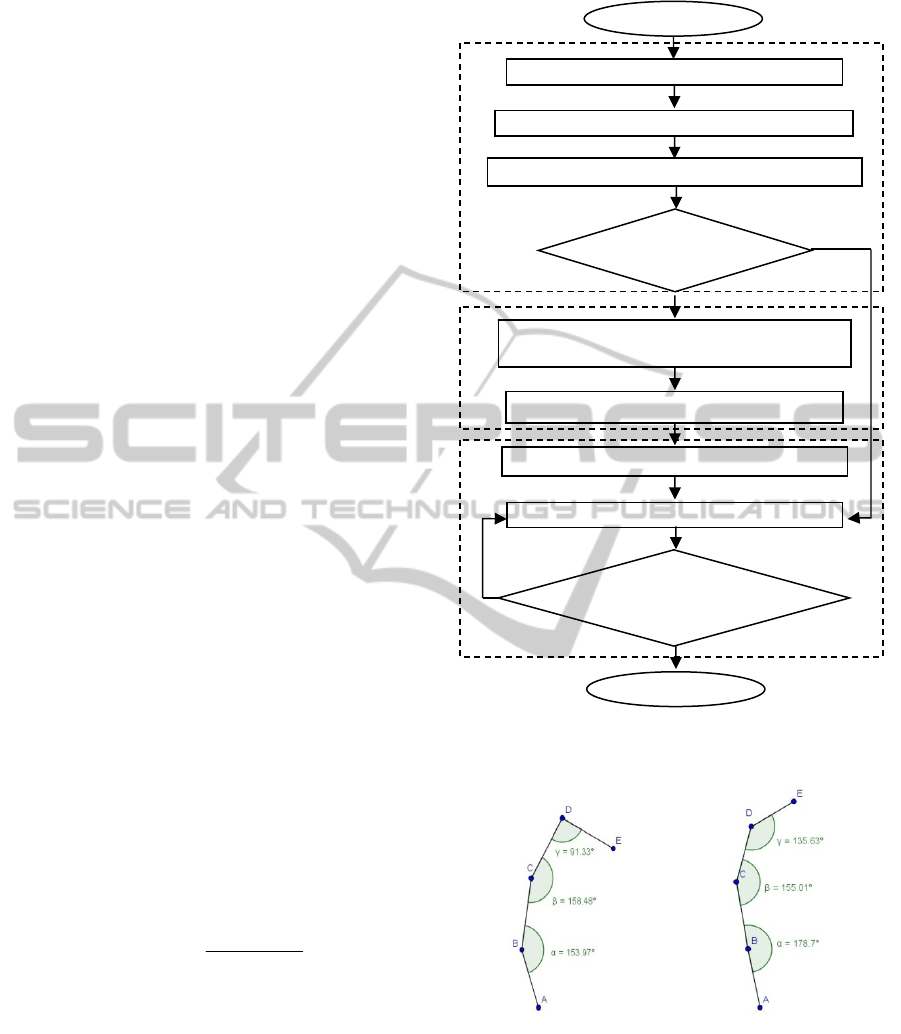
The proposed method follows three main steps to
detect conic shaped objects in an image. The flow
chart of the proposed method is presented in Figure
1. The first step is to extract smooth conic edge
curves from the edge map obtained by Canny edge
detector; the second step is to generate the conic
hypothesis; and the last step is to detect conics from
the conic hypothesis. Each step of the proposed
method is discussed in details in the following
subsections.
3.1 Extraction of the Conic Edge
Segment
Firstly, an edge map is generated from a given
image using Canny edge detection method. Then,
connected edge contours and line segments are
obtained from the edge map using Kovesi’s codes
(Kovesi 2000).
3.1.1 Sharp Turn and Zero Curvature
Detection
Using two consecutive line segments with points
(x
pre
, y
pre
), (x
curr
, y
curr
) and (x
next
, y
next
) in counter
clockwise direction, a triangle is formed. The angle
between two consecutive line segments is obtained
by the following equation
bc
acb
CoscurrAngle
2
)(
222
1
,
(1)
where
cba ,,
are triangle sides between (x
pre
, y
pre
) &
(x
curr
, y
curr
), (x
curr
, y
curr
) & (x
next
, y
next
) and (x
next
, y
next
)
& (x
pre
, y
pre
) respectively. If the Angle(Curr) is less
than 100° or greater than 175°, line segments are
divided into two parts at (x
curr
, y
curr
) point. The
reason is that angle less than 100° suppose to be a
corner point and angle greater than 175° is almost
similar to a straight line (see Figure 2). Again, if the
value of a or b exceeds 100 pixels, the line segment
is divided at (x
curr
, y
curr
).
Figure 1: The flow chart of the proposed method.
(a) (b)
Figure 2: The sharp turn and zero curvature elimination.
(a) sharp turn point is D, (b) zero curvature point is B.
3.1.2 Inflection Point Detection
If (x
curr
, y
curr
) is not considered as a sharp turn point,
the TAR is calculated by the following equation
N
Y
Y
N
Star
t
Edge detection by Canny edge
Line segments formation by Kovesi
Split edges at sharp turn and inflection
i
Construct tangents to ends of each edge
segments
Conic parts grouping
Is edge segment
closed?
Verification of object of interes
t
Conic parts construction & fittings
Is there any edge
contours remaining?
En
d
ConicsDetectionMethodbasedonPascal'sTheorem
493
1
1
1
2
1
)(
nextnext
currcurr
prepre
yx
yx
yx
DetcurrTAR
,
(2)
where, Det presents the matrix determinant. The
negative, positive, and zero values of TAR(curr)
represent concave, convex and straight-line
respectively (Alajlan et al. 2007). Here, we split
edge segment at a point containing zero TAR(curr)
value. As a result, the extracted line-segments only
contain negative (n) or positive (p) values. Let, {T
1
,
T
2
, T
3,
… T
M
} be the sequence of line segments
where M represents the total number of positive and
negative values within an edge segment. T
i
{i=1, 2,
3, … M} contains either n or p values. To identify
the inflection points, the following criteria are
applied.
1.
if T
i
= n and T
i-1
=
1i
T
= p, the splitting point
is
i
T
2.
if
i
T
=
1i
T
= n and
2i
T
=
1i
T
= p, the
splitting point is
i
T
and
1i
T
3.
if
i
T
= n and
3i
T
=
2i
T
=
1i
T
= p, the splitting
point is
i
T
Table 1: Representation of the inflection points.
T
i-2
T
i-1
T
i
T
i+1
T
i+2
p p n p p
n n p n n
p n n p p
n p p n n
p p p n n
n n n p p
Table 1 summaries the possible cases to reflect the
selective criteria that find out the inflection points.
After splitting edge segments at the inflection points,
edge segments containing at least three n or p values
are selected. Later, the closed edge contours and the
selected edge segments are considered for the next
step to generate conic hypothesis.
3.2 Generation of the Conic Hypothesis
To validate an edge segment as a conic part,
tangents are drawn at each endpoint of an edge
segment using Pascal’s theorem (Coxeter & Greitzer
1967). This is one of the main contributions of the
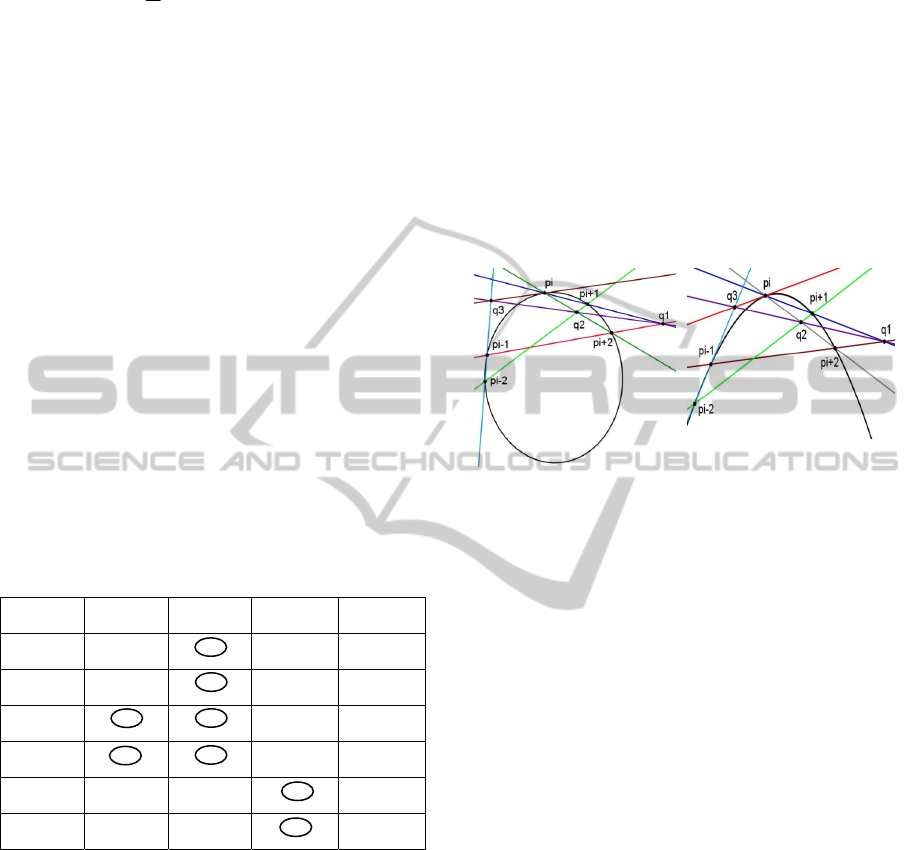
paper. Consider p
i-2
, p
i-1
, p
i
, p
i+1
, and p
i+2
are five
points of an ellipse (see Figure 3(a)) and a parabola
(see Figure 3(b)). To avoid exceptional case of this
theorem, these five points are selected in such a way
that no three collinear and no parallel lines can be
formed using these points. Point q
1
is the
intersection of line p
i
p
i+1
and line p
i-1
p
i+2
, and q
2
is
the intersection of p
i
p
i+2
and p
i-2
p
i+1
respectively.
Again, p
i-1
p
i-2
and q
1
q
2
must meet at point q
3
. The
expected tangent line of the conic at point p
i
is
obtained by connecting p
i
and
q
3
. Similarly, we can
get tangent line at point p
i+1
or other points. The
pseudo-code for tangent detection is described in
Figure 4.
(a) (b)
Figure 3: The construction of tangent on a point of the
conic sections using Pascal’s theorem. Tangents (p
i
q
3
) are
drawn on the point p
i
of (a) an ellipse and (b) a parabola.
Tangent (p
i-2
, p
i-1
, p
i
, p
i+1
, p
i+2
)
// p
i-2
, p
i-1
, p
i
, p
i+1
, p
i+2
are five
//points. Tangent will be constructed
//on point p
i
Begin
1. Find the intersecting point (q
1
)
between p
i
p
i+1
and p
i-1
p
i+2
2. Find the intersecting point (q
2
)
between p
i
p
i+2
and p
i-2
p
i+1
3. Find the intersecting point (q
3
)
between p
i-1
p
i-2
and q
1
q
2
4. Draw the tangent on p
i
by
connecting p
i
and q
3
End
Figure 4: Pseudocode of the proposed tangent detection
algorithm.
These tangents are then used to construct conic
part using the Pascal’s Theorem. In our method,
these five points are obtained from an edge segment
so that these points can divide it into four equal
parts. We follow this approach as it represents the
conic more accurately than the random sampling.
Now, another main contribution of this work to
construct conic parts is discussed here. To construct
a conic part, two tangent lines (t
1
and t
2
on x
i-1
and
x
i+1
respectively) and a point (x
i
) on the conic part
are required (see Figure 5). First, t
1
and t
2
intersect at
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
494
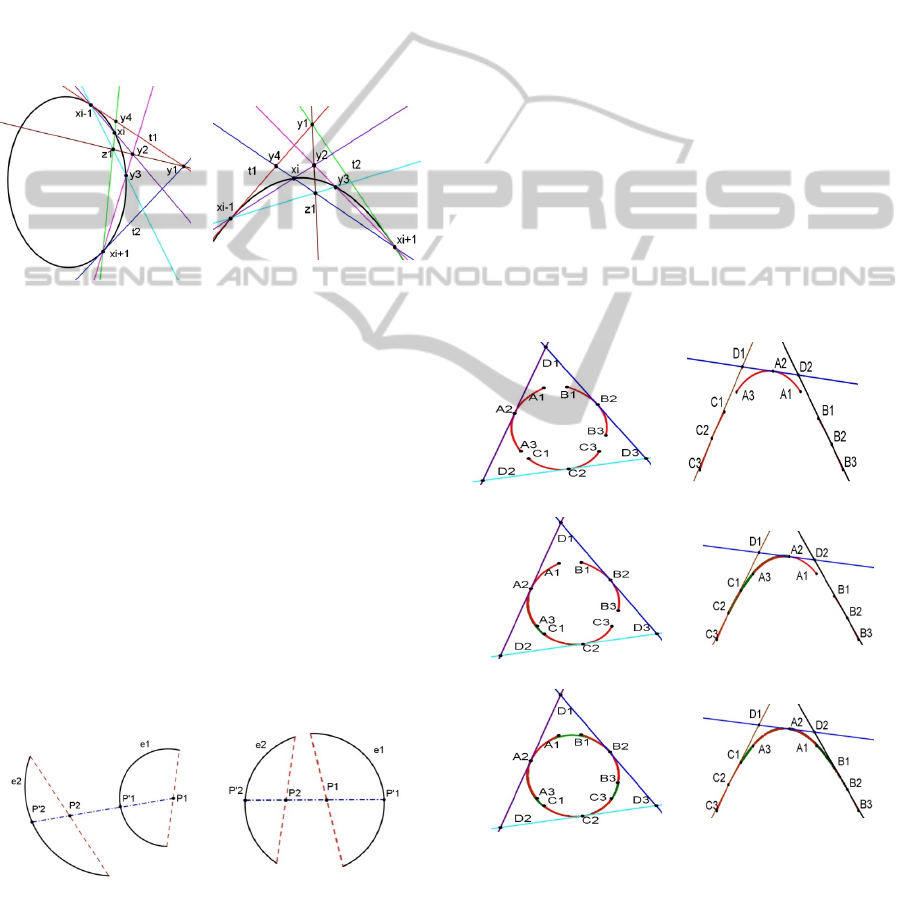
point y
1
. The Point z
1
is taken from line x
i
x
i+1
. The
intersection of y
1
z
1
and x
i-1
x
i
is y
2
. Connecting x
i-1
z
1
and x
i+1
y
2
, y
3
is crossing the conic at point y
3
. If z
1
moves from x
i+1
to y
4
(intersection of t
1
and x
i
x
i+1
),
the conic part x
i-1
x
i
x
i+1
will be constructed. Here, we
obtained points, x
i-1
, x
i
and x
i+1
from the two ends
and the midpoint of the edge segment. In this way,
we get rid of the influence of traditional construction
of tangent line on the unsmoothed digital curves.
The edge segments fitted with the corresponding
conic parts using LSF method with residual two
pixels are kept for further processing. Otherwise, the
edge segments are neglected.
(a) (b)
Figure 5: Conic part construction using two tangents and a
point on the conic (a) ellipse part construction and (b)
parabola part construction.
3.3 Detection of the Conics
Following the previous step, the obtained edge
segments are sorted according to their length in a
descending order. After selecting an edge segment
from the list, other edge neighboring fragments
satisfying the convexity constraints are grouped with
edge segment to form a conic. Here, we follow the
method applied by (Prasad et al. 2012). Consider e
1
and e
2
are two edge segments and P
1
and P
2
are the
midpoints obtained from two ends of e
1
and e
2
respectively (Figure 6). Suppose line P
1
P
2
intersects
(a) (b)
Figure 6: The condition of associated convexity (a) e1 an
d
e2 cannot be grouped together, (b) e1 and e2 can be
grouped together.
e
1
and e
2
at P'
1
and P'
2
respectively. The edge
segments e
1
and e
2
can be grouped if they satisfy the
following condition
'
2221
'
11
'
2
'
1
PPPPPPPP
.
(3)
Here, the procedure to group segments to form a
conic section is presented. This is one of the key
contributions of this paper. Suppose, an edge
segment A
1
A
2
A
3
has two other edge segments
(B
1
B
2
B
3
and C
1
C
2
C
3
) that satisfy the convexity
constraints (see Figure 7). These edge contours are
sorted based on the distance from the ends of the
edge segments A
1
A
2
A
3
. After that, tangents are
drawn on the midpoints of each segment as
discussed in subsection 3.2 (see Figure 7(a1) &
7(b1)). It is seen that C
1
C
2
C
3
is closer to A
1
A
2
A
3
than
B
1
B
2
B
3
. As a result, a conic part is constructed
according to subsection 3.2 shown in Figure 7(a2) &
7(b2). If the constructed conic part fits with the
A
1
A
2
A
3
and C
1
C
2
C
3
by LSF method with residual
two pixels, they are merged together. Next, another
segments B
1
B
2
B
3
is selected and the same procedure
is followed to connect two edge segments (see
Figure 7(a3) & 7(b3)).
(a1) (b1)
(a2) (b2)
(a3) (b3)
Figure 7: The procedure to merge the conic edge
segments as a part of an ellipse (a1-a3) and a parabola
(b1-b3).
After merging the groups of edge segments in to a
single curve C
ue
, now, we need to verify whether this
curve is a conic matching the interested object.
ConicsDetectionMethodbasedonPascal'sTheorem
495
Hence, on this curve, five equally spaced points are
picked up in such a way that no three collinear and
no parallel lines can be formed using these points.
The points are selected from the curve at equally
distance as this approach presents the curve more
accurately. Based on Pascal Theorem, a conic C
on
can be constructed crossing these five points. The
difference D between the grouped curve C
ue
and the
conic C
on
is calculated by least square distance. If D
is less than a predefined threshold, this curve C
ur
is
identified as a valid conic shaped boundary of the
interested object.
Next, another edge segment is selected from the
list sorted in a descending order and the same
process is followed. The process mentioned in this
section will be iterated until there is no edge
segment to process.
4 RESULTS & DISCUSSION
We selected some images containing round shaped
objects from Caltech-256 database (Griffin et al.
2007) to evaluate the performance of the proposed
method and compared with the recently proposed
method for detecting the circle and ellipse known as
EDCircles method (Akinlar & Topal 2013). The
EDCircles uses two different LSF based methods for
detecting both circle and ellipse. In this method, the
least square fitting algorithm is applied for detecting
circle and direct least square fitting of ellipse is
implemented for ellipse detection from an image.
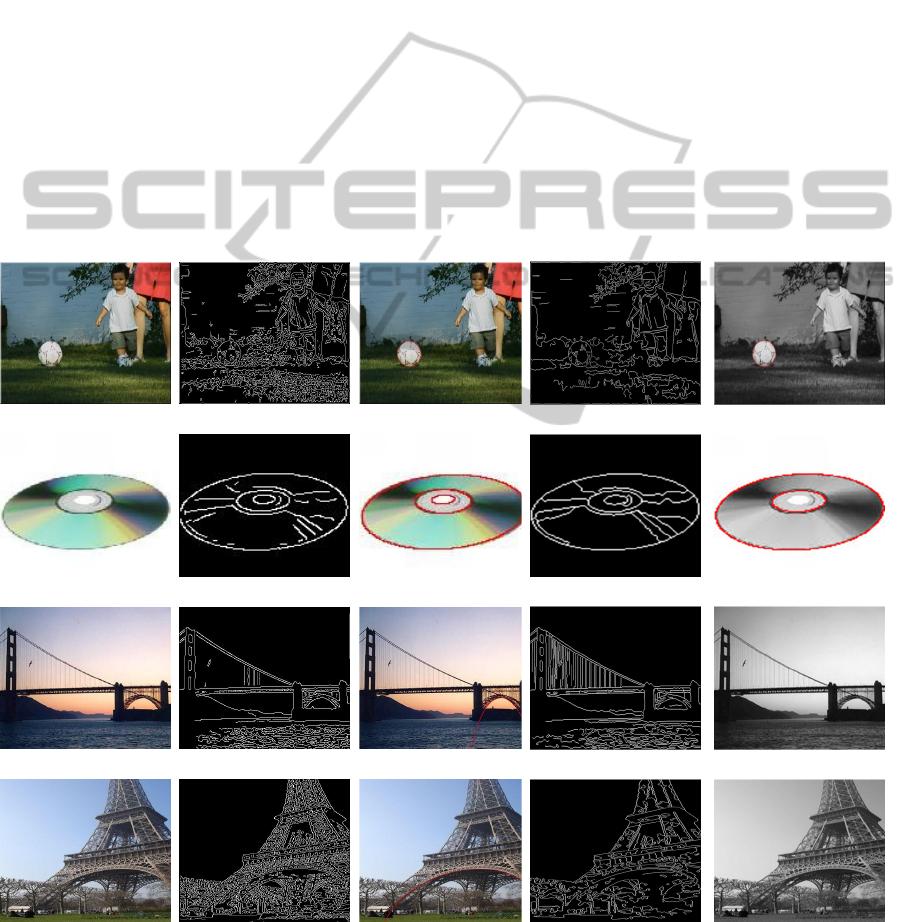
Four sample images and their comparison results
are shown in Figure 8. The first column (Figure
8(a1-a4)) shows four sample images. The results of
canny edge detector and the proposed method are
shown in the second and third column respectively.
The edge detection result obtained by EDPF is
Sample Image Canny Proposed Method EDPF EDCircles
(a1) (a2) (a3) (a4) (a5)
(b1) (b2) (b3) (b4) (b5)
(c1) (c2) (c3) (c4) (c5)
(d1) (d2) (d3) (d4) (d5)
Figure 8: Comparison results by the proposed method and EDCicles. First column (a1-d1) the sample image, secon
d
column (a2-d2) Canny edge detection, third column (a3-d3) the results obtained by the proposed method, forth column (a4-
d4) edge detection by EDPF and last column (a5-d5) the results obtained by EDCircles.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
496

presented in the forth column. The last column
represents the outputs of EDCircles method.
It can be seen from Figure 8(a3-d3) that our method
can detect both elliptical and parabolic shape.
Conversely, EDCircles detects only circular shape
and misses parabolic shape although their EDPF
method (Akinlar & Topal 2013) can detect the edge
representing the parabolic shape (see Figure 8(c4)
and 8(d4)). The reason is that circle and ellipse
detection methods are applied in EDCircles. As this
method does not apply any parabola detection
method, it cannot detect any parabolic shaped object
shown in Figure 8(c5) and 8(d5). Instead of using
several different methods for detecting different
conic shape, we use only a single procedure based
on Pascal’s theorem to detect any conic shaped
object (see Figure 8(a3-d3)).
It has been noted that the result of the proposed
method depends on the Canny edge detection
method. If edges of a conic shaped (such as, circle,
ellipse or parabola) object are not detected by Canny
edge detector, this method will fail to detect that
conic shaped object. Another drawback is that our
method completely depends on the conic edge
segments detected by subsection 3.1. If two different
conic segments merged such a way that there is no
sharp turn or inflection point exist, this method will
consider it as a non-conic edge segment. This
problem is also unsolved by other methods such as
(Prasad et al. 2012).
5 CONCLUSIONS
The proposed method can detect any type of conic
shaped object from the real image in a single
operation by constructing tangent, conic parts and
conic using Pascal’s theorem. The existing method
such as EDCircles (Akinlar & Topal 2013) uses
separate methods (least squares circle fit and direct
least square fitting of ellipses) for detecting different
type of conic sections. Another traditional method
for detecting conic sections is based on Hough
Transform. This method detects parameter for
detecting conic shape. For example, Hough
Transform constructs three-dimensional, five-
dimensional, four-dimensional parameter space for
detecting circle, ellipse and parabola respectively.
As a result, a single Hough Transform method
cannot be used to detect any type of conics. In future
work, we will compare other geometric shape based
methods and Pascal’s theorem based method to
detect the conic shaped objects.
REFERENCES
Akinlar, C. & Topal, C., 2013. EDCircles: A real-time
circle detector with a false detection control. Pattern
Recognition, 46(3), pp.725–740.
Alajlan, N. et al., 2007. Shape retrieval using triangle-area
representation and dynamic space warping. Pattern
Recognition, 40(7), pp.1911–1920.
Chia, A. & Rahardja, S., 2011. A split and merge based
ellipse detector with self-correcting capability. Image
Processing, IEEE Transaction on, 20(7), pp.1991–
2006.
Coxeter, H. & Greitzer, S., 1967. Geometry revisited,
Mathematical Association of America Washington,
DC.
Griffin, G., Holub, A. & Perona, P., 2007. Caltech-256
object category dataset.
Kovesi, P.D., 2000. MATLAB and Octave functions for
computer vision and image processing. Online:
http://www. csse. uwa. edu. au/~
pk/Research/MatlabFns/# match.
McLaughlin, R.A., 2000. Intelligent algorithms for finding
curves and surfaces in real world data, PhD Thesis,
Department of Electrical and Electronic Engineering,
University of Western Australia, 2000.
Prasad, D.K., Leung, M.K.H. & Cho, S.-Y., 2012. Edge
curvature and convexity based ellipse detection
method. Pattern Recognition, 45(9), pp.3204–3221.
Qiao, Y. & Ong, S.H., 2007. Arc-based evaluation and
detection of ellipses. Pattern recognition, 40(7),
pp.1990–2003.
Wong, C. & Lin, S., 2012. A survey on ellipse detection
methods. Industrial Electronics (ISIE), 2012 IEEE
International Symposium on, pp.1105–1110.
Xu, L., Oja, E. & Kultanen, P., 1990. A new curve
detection method: randomized Hough transform
(RHT). Pattern recognition letters, 11(5), pp.331–338.
ConicsDetectionMethodbasedonPascal'sTheorem
497
