
Combined Bilateral Filter for Enhanced Real-time Upsampling
of Depth Images
Oliver Wasenm
¨
uller, Gabriele Bleser and Didier Stricker
Germany Research Center for Artificial Intelligence (DFKI), Trippstadter Str. 122, Kaiserslautern, Germany
Keywords:
Depth Image, Upsampling, Joint Bilateral Filter, Texture Copying, Depth Discontinuity, Sensor Fusion.
Abstract:
Highly accurate depth images at video frame rate are required in many areas of computer vision, such as 3D
reconstruction, 3D video capturing or manufacturing. Nowadays low cost depth cameras, which deliver a high
frame rate, are widely spread but suffer from a high level of noise and a low resolution. Thus, a sophisticated
real time upsampling algorithm is strongly required. In this paper we propose a new sensor fusion approach
called Combined Bilateral Filter (CBF) together with the new Depth Discontinuity Preservation (DDP) post
processing, which combine the information of a depth and a color sensor. Thereby we especially focus on
two drawbacks that are common in related algorithms namely texture copying and upsampling without depth
discontinuity preservation. The output of our algorithm is a higher resolution depth image with essentially
reduced noise, no aliasing effects, no texture copying and very sharply preserved edges. In a ground truth
comparison our algorithm was able to reduce the mean error up to 73% within around 30ms. Furthermore, we
compare our method against other state of the art algorithms and obtain superior results.
1 INTRODUCTION
Within recent years low-cost depth cameras are
widely spread. These cameras are able to measure the
distance from the camera to an object for each pixel
at video frame rate. There are two common technolo-
gies to measure depth. Time-of-Flight (ToF) cameras,
such as the SwissRanger or the Microsoft Kinect v2,
emit light and measure the time the light takes to re-
turn to the sensor. Structured light cameras, such as
the Microsoft Kinect v1 or the Occipital Structure,
project a pattern into the scene and capture the local
disparity of the pattern in the image. In all these cam-
eras high speed and low price are accompanied by low
resolution (e.g. Kinect v2: 512 × 484px) and a high
level of noise. However, their application areas, such
as 3D reconstruction of non-rigid objects, 3D video
capturing or manufacturing, require both high qual-
ity depth estimates and fast capturing. High-end de-
vices, such as laser scanners, provide extremely ac-
curate depth measures, but are usually expensive and
only able to measure a single point at a time. Thus,
a sophisticated filter algorithm to increase the resolu-
tion and decrease the noise level of depth images in
real-time is strongly required.
In this paper we propose an enhanced real-time
iterative upsampling, which we call Combined Bilat-
eral Filter (CBF). Our new algorithm is based on a
fusion of depth and color sensor with the principle
of Joint Bilateral Filtering (JBF) (Kopf et al., 2007).
Such algorithms take as an input a low resolution
and noisy depth image together with a high resolu-
tion color image as e.g. Kinect produces it. They
process the two images to a high resolution noise-
reduced depth image as shown in Figure 1. Thereby
we especially focus on two drawbacks that are com-
mon in JBF based algorithms namely texture copy-
ing and no depth discontinuity preservation. Texture
copying (see Figure 5(k)) is an artifact that occurs
when textures from the color image are transferred
into geometric patterns that appear in the upsampled
depth image. Our proposed filter algorithm is a new
combination of a traditional bilateral filter with a JBF
to avoid texture copying. The new Depth Discontinu-
ity Preservation (DDP) post processing step prohibits
wrong depth estimates close to edges (see Figure 4),
which occur in many bilateral filters. The remainder
of this paper is organized as follows: Section 2 gives
an overview of existing methods for depth image up-
sampling. The proposed CBF algorithm and the DDP
post processing are motivated and explained in detail
in Section 3, while they are evaluated regarding qual-
ity and runtime in Section 4. The work is concluded
in Section 5.
5
Wasenmüller O., Bleser G. and Stricker D..
Combined Bilateral Filter for Enhanced Real-time Upsampling of Depth Images.
DOI: 10.5220/0005234800050012
In Proceedings of the 10th International Conference on Computer Vision Theory and Applications (VISAPP-2015), pages 5-12
ISBN: 978-989-758-089-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)
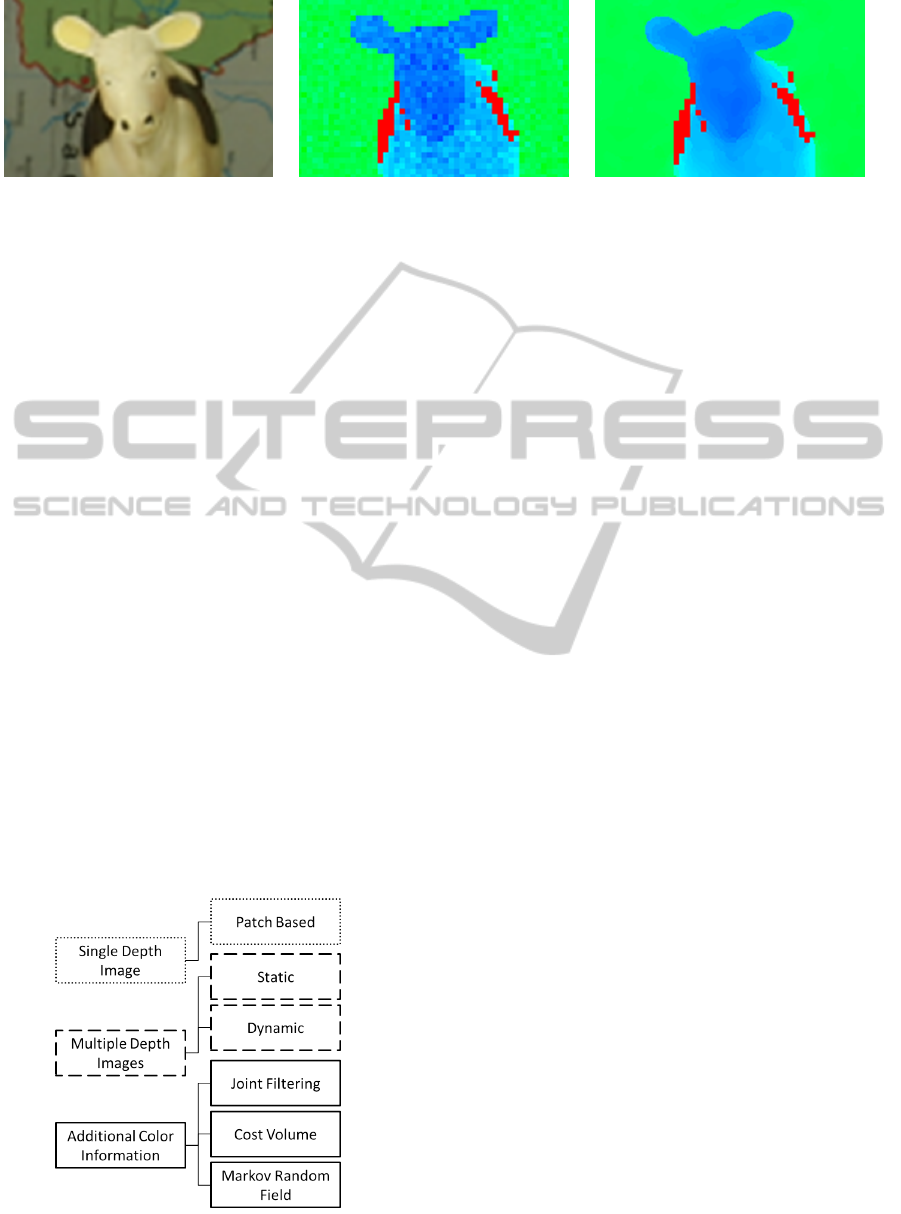
(a) (b) (c)
Figure 1: Proposed filter. (a) Color input image. (b) Depth input image. (c) Final result: significantly reduced noise,
no aliasing effects, no texture copying, very sharply preserved edges and a higher resolution. Baby3 dataset taken from
(Scharstein and Szeliski, 2003). Red pixels have no depth value.
2 RELATED WORK
Depth image upsampling is a well-known problem in
the literature and its currently established solutions
can be subdivided into three main categories. A rough
classification is depicted in Figure 2.
In the first main category the upsampling is based
on one single depth image. Besides simple upsam-
pling, which is not considered here, this includes
methods that apply machine learning approaches like
for example in (Aodha et al., 2012). Additional infor-
mation is here provided via training patches with pairs
of low and high resolution depth images that show dif-
ferent scenes. After training the patches an upsampled
image can be computed based on the training data.
However, the training dataset needs to be represen-
tative, whereas runtime grows with the database size.
Thus, a patch based approach is not applicable for real
time upsampling.
In the second main category the upsampling is
based on multiple depth images, which were captured
either from a moving camera or multiple displaced
cameras. This requires to register the input images
Figure 2: A rough classification of current methods for
depth image upsampling.
and to find a suitable way to combine them to an up-
sampled image. These methods differ in the ability
to cope with displacement. Thus, a classification into
static methods with small displacement (e.g. (Schuon
et al., 2009)) and dynamic methods with large dis-
placement (e.g. (Cui et al., 2010)) is reasonable.
However, none of these methods is able to process
depth images in real time and thus they are not suit-
able for our purpose.
In the third main category the upsampling is based
on one depth image and one simultaneously captured
color image. The methods are based on the assump-
tion of coherent depth and color discontinuity, mean-
ing that edges in the color image coincide with edges
in the depth image and vice versa.
One approach for using color information in depth
images is a Markov Random Field (MRF) as proposed
in (Diebel and Thrun, 2005). Therefore, they define
the posterior probability of the upsampled depth im-
age as a MRF and optimize for the maximum a pos-
teriori solution. However, this approach suffers from
texture copying and high calculation time.
Another approach to use color information in
depth images is a cost volume approach as proposed
in (Yang et al., 2007). This is based on minimiza-
tion of costs in a volume with different depth hypothe-
ses. After initial construction of the volume, a filter is
applied on each depth hypothesis and for each pixel
the depth value with lowest cost is chosen. The filter
is one of the crucial points in this method and often
realized by an edge preserving filter. This principle
suffers also from texture copying, but preserves sharp
edges very well. However, it has a high complexity,
since the filter must be applied to each single depth
hypothesis. Thus, it has a high calculation time and is
not suitable for our purpose.
The last common approach to use color informa-
tion in depth images is Joint Bilateral Filtering (JBF).
The basic idea comes from 2D image filtering, where
the bilateral filter (BF) for smoothing images and at
the same time preserving edges was introduced in
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
6

(Tomasi and Manduchi, 1998). The key idea of this
filter is that the influence of a pixel in the calcula-
tion of another pixel does not only depend on spatial
neighborhood but also on similar color values. The
BF is computed for a pixel p from the input image I
in a neighborhood N around p by
BF
Tomasi
(I)
p
=
1
∑
q∈N
W
p,q
·
∑
q∈N
W
p,q
· I
q
(1)
with W
p,q
= G
σ
s
(p −q)G
σ
r
(I
p
− I
q
),
where W
p,q
is a weighting factor, G
σ
s
is the spatial
filter kernel and G
σ
r
is the range filter kernel. The
spatial filter kernel G
σ
s
is a Gaussian with variance σ
s
centered at the pixel p and decreases the influence of
distant pixels q. On the other hand the range filter ker-
nel G
σ
r
is a Gaussian with variance σ
r
that decreases
the influence of pixels q with distant color I
q
to I
p
.
This idea was extended in (Kopf et al., 2007) to the
JBF, where a depth image D is filtered with the guid-
ance of a color image I. A pixel in the depth image is
then influenced by neighboring pixels depending on
their distance and the difference of the corresponding
color values. The JBF can be computed for a pixel p
from the depth image D and the color image I by
JBF
Kop f
(D, I)
p
=
1
∑
q∈N
W
p,q
·
∑
q∈N
W
p,q
· D
q
(2)
with W
p,q
= G
σ
s
(p − q)G
σ
r
(I
p
− I
q
).
The main assumption here is again coherent depth
and color discontinuity leading to texture copying in
regions, which are both flat and textured. This prob-
lem was addressed in some related work like e.g. in
(Kim et al., 2011) by an extension of the JBF. They
add a blending function α to the JBF in order to con-
trol the influence of the spatial kernel G
σ
s
and the
range kernel G
σ
r
. The idea is to differentiate two
cases and filter pixels of flat areas with the spatial ker-
nel, in order to avoid texture copying, while pixels of
edge areas are filtered with the range kernel. The fil-
ter can then be computed for a pixel p from the depth
image D and the color image I by
JBF
Kim
(D, I)
p
=
1
∑
q∈N
W
0
p,q
·W
0
p,q
(3)
with W
0
p,q
=
∑
q∈N
[(1 − α(∆
N
))G
σ
s
(p − q) +
α(∆
N
)G
σ
r
(I
p
− I
q
)]D
q
and α (∆
N
) =
1
1 + e
−ε(∆
N
−τ)
,
where W
0
p,q
is a weighting factor. In the considered
neighborhood N the difference between the maximum
and minimum depth value is ∆
N
, whereas ε and τ are
constants. The min-max difference τ determines at
which value the blending interval shall be centered,
whereas ε controls the width of the transition area
between the two cases. This method avoids texture
copying quite well but performs poorly in edge re-
gions (Figure 6).
3 METHOD
Our proposed filter is able to iteratively upsample a
low resolution and noisy depth image in real time.
Therefore, we use a new so-called Combined Bilat-
eral Filter (CBF, see Section 3.1) composed of a Joint
Bilateral Filter (JBF) and traditional Bilateral Filter
(BF). With this combination the filter avoids texture
copying. The new Depth Discontinuity Preservation
(DDP) post processing step in Section 3.2 prohibits
wrong depth estimates close to edges, which occur
in many bilateral filters. The whole iterative filtering
process is explained in Section 3.3. An overview of
our filter is given in Figure 3, while its details are out-
lined below.
3.1 Combined Bilateral Filter (CBF)
The proposed CBF is driven by the observation that
the JBF delivers good results for edge areas in depth
images, but performs poorly in flat depth image re-
gions by introducing artefacts like texture copying.
These artefacts are mainly caused by the influence of
the color information. Thus, we filter the depth image
in flat regions without any guidance of color informa-
tion by a traditional BF (see Equation 1). Note, in
contrast to the filter of (Kim et al., 2011) in Equa-
tion 3 we still filter by an edge preserving filter in flat
areas. This enables us to preserve also fine depth dis-
continuities in (almost) flat regions.
The crucial point is to determine the type of re-
gion (flat or edge) in a depth image for a given point.
A straight forward approach with an edge detection
algorithm like e.g. (Canny, 1986) as preprocessing is
not suitable here, because our filter should run in real
time. Thus, we need to determine the type of region
while filtering.
In our approach two filters - the BF and the JBF -
are applied in parallel for a given pixel p. The type of
region is then estimated based on the difference ∆
p
of
these two filter results with
∆
p
= |JBF(D, I)
p
− BF(D)
p
|. (4)
The difference ∆
p
is low in flat regions and high in
edge regions. Thus, the CBF can be computed for a
CombinedBilateralFilterforEnhancedReal-timeUpsamplingofDepthImages
7
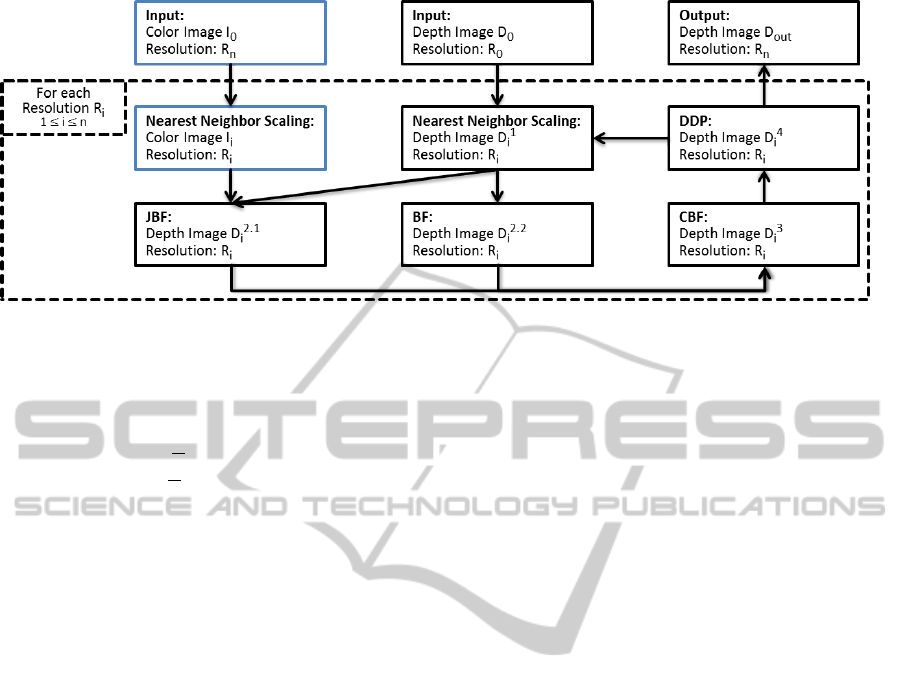
Figure 3: Schematic overview of proposed depth image upsampling filter.
pixel p from the depth image D and the color image I
by
CBF(D, I)
p
=
JBF(D, I)
p
, ∆
p
> s
cos
2
π
2s
∆
p
BF(D)
p
+
sin
2
π
2s
∆
p
JBF(D, I)
p
, ∆
p
≤ s
, (5)
where s is a manually chosen threshold to determine
above which value of ∆
p
only the JBF is used any-
more. With the decision to use sine and cosine re-
spectively as blending function a normalization is not
necessary, since ∀x : sin
2
x + cos
2
x = 1.
3.2 Depth Discontinuity Preservation
(DDP)
The CBF is an edge preserving filter, since it is com-
posed of the two edge preserving filters BF and JBF.
However, after filtering fine blur still remains around
edges in the depth image just as in the BF and JBF.
For 2D images, where the bilateral filtering concept
comes from, this has not a high impact, since fine blur
around edges still looks appealing from a visual point
of view. Certainly, fine blur around edges in depth im-
ages has a high impact as shown in Figure 4. If a depth
sensor captures two distant but overlapping planes, it
captures (nearly) no pixels between these two planes.
However, by filtering with a JBF or a BF a transition
consisting of pixels between the two planes is created.
These pixels are of course substantially wrong, since
in reality there is no connection between the planes
and also the depth sensor did not capture any connec-
tion. This error occurs in many existing bilateral filter
based depth image filtering algorithms.
Thus, in this paper we propose a new post pro-
cessing filter called Depth Discontinuity Preservation
(DDP) to avoid depth transitions between different
depth levels. The goal is to adjust wrong filter results
by shifting pixels to the correct depth level. The idea
of DDP is that the edge preserving filter should only
output a pixel p, whose depth value was already exist-
ing before filtering in a small neighborhood N around
p. This idea is similar to a median filter, but in con-
trast DDP retains the edge preserving property of the
input filter like e.g. the CBF. More formally, DDP
filters a pixel p for a raw depth image D and a CBF
result (cf. Equation 5) by
DDP(D,CBF)
p
=
n
CBF
j
j ∈ N;∀k ∈ N :
kCBF
j
− D
p
k ≤ kCBF
k
− D
p
k
o
, (6)
where N is a small neighborhood around p. The effect
of DDP is discussed in Section 4 (see Figure 4).
3.3 Filtering Process
Our filter (see Figure 3) takes as an input a color Im-
age I
0
with a high resolution R
n
and a depth image
D
0
with a low resolution R
0
. The goal is to increase
the resolution of D
0
from R
0
to R
n
. Therefore, we use
an iterative procedure with n iterations. Unlike other
methods we do not directly upsample D
0
from R
0
to
R
n
and filter afterwards several times on the highest
resolution, since filtering on high resolutions is time
consuming. Our method converges to resolution R
n
in
each iteration in a linear way.
In the i-th iteration both the color image I
0
and the
depth image D
i−1
are scaled to resolution R
i
resulting
in I
i
and D
1
i
respectively. The BF (Equation 1) and
the JBF (Equation 2) are then applied to I
i
and D
1
i
required for our CBF (Equation 5). The output of the
CBF is the depth image D
3
i
, which is refined by our
DDP (Equation 6) filter to D
4
i
. If the final resolution
is reached (i = n) the depth image D
4
i
is the final result
D
out
, otherwise the next iteration starts. The effects of
each step are illustrated in Figure 5 and are reviewed
in Section 4.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
8

(a) (b) (c) (d)
(e) (f) (g) (h)
Figure 4: Depth Discontinuity Preservation (DDP). (a),(e): input depth image. (b),(f): joint bilateral filter (JBF) or combined
bilateral filter (CBF). (c),(g): JBF or CBF with DDP postprocessing. (d),(h): ground truth. Top row: 2D depth image. Bottom
row: depth image in 3D view. Wood2 dataset taken from (Scharstein and Szeliski, 2003).
4 EVALUATION
In this section we evaluate our CBF algorithm. There-
fore, we first explain our evaluation setup in Section
4.1. In a second step we evaluate our CBF algorithm
from a visual point of view in Section 4.2. At the end
we compare in Section 4.3 our CBF algorithm against
ground truth data and related algorithms.
4.1 Evaluation Setup
The evaluation of depth images is not trivial, since
it is hard to produce ground truth data. Thus, we
used - like many other authors - the disparity images
of the stereo datasets of Middlebury (Scharstein and
Szeliski, 2003) in the evaluation of our algorithm. A
disparity image can also be seen as a depth image, be-
cause depth and disparity are directly related. Hence,
the disparity images with a resolution of 1282×1110
are used as ground truth data.
For the simulation of depth sensor data we down-
sample the resolution by factor 4, since real depth
data has a resolution in this range. To simulate the
depth sensors noise we add a Gaussian noise with a
standard deviation of 4 to the downsampled image.
The downsampled and noisy depth image serves then
as an input for both our developed and competitive
depth image upsampling algorithms. In the ground
truth comparisons of this section we compare the out-
put of a given filter against the raw depth image. To
demonstrate the effects of depth image upsampling
algorithms we distinguish between flat and edge ar-
eas. The edges are detected by a Canny edge detec-
tor (Canny, 1986) and then dilated to cover the whole
edge area. The flat areas are the complement of the
edge areas. For the quantitative evaluation we choose
two measures: For a depth image D and ground truth
image G with n pixels the Mean Error (ME) can be
estimated by
ME(D, G) =
1
n
n
∑
i=1
kD
i
− G
i
k (7)
and the Error Rate (ER) by
ER(D, G) =
1
n
m
∑
i=1
p
i
, ∀p
m
: kD
p
m
− G
p
m
k > 2. (8)
The ER gives the percentage of pixels, which have
an error greater than 2. The quality of both our CBF
algorithm and competitive algorithms depends on the
choice of the corresponding parameters. We chose
the parameters of Table 1 empirically in several tests
to achieve the best results for each algorithm.
Table 1: Parameters of evaluated algorithms.
|N| σ
s
σ
r
s ε τ
CBF + DDP 49 3 2 18 - -
JBF
Kop f
49 3 2 - - -
JBF
Kim
49 3 0.5 - 15 0.5
Cost Volume 49 3 3 - - -
4.2 Qualitative Evaluation
In this section we qualitatively evaluate the effects of
our new filter. Therefore, Figure 5 shows the resulting
depth image after each single filtering step. The top
row (Figure 5 (a)-(g)) demonstrates the effects of edge
CombinedBilateralFilterforEnhancedReal-timeUpsamplingofDepthImages
9
(a) I
0
(b) D
1
0
(c) D
2.2
0
(d) D
2.1
0
(e) D
3
0
(f) D
4
0
(g) D
4
1
(h) I
0
(i) D
1
0
(j) D
2.2
0
(k) D
2.1
0
(l) D
3
0
(m) D
4
0
(n) D
4
1
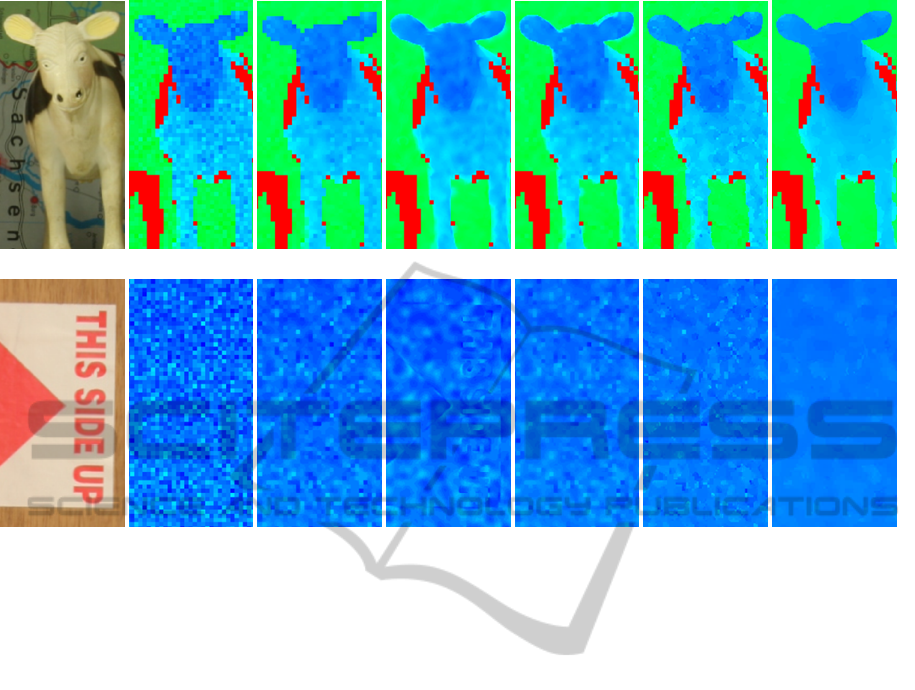
Figure 5: Illustration of each step in our filter for two exemplary zoomed datasets. (a),(h): input color image. (b),(i): input
depth image. (c),(j): bilateral filter. (d),(k): joint bilateral filter. (e),(l): combined bilateral filter (CBF). (f),(m): depth
discontinuity preservation (DDP). (g),(n): final result after two iterations. Top row: Baby3 dataset. Bottom row: Wood2
dataset. Each taken from (Scharstein and Szeliski, 2003). Red pixels have no depth value.
preserving filtering while removing noise, whereas
the bottom row (Figure 5 (h)-(n)) illustrates the fil-
tering of a flat and textured region. The first column
shows the high resolution color input image I
i
and the
second column depicts the low resolution depth input
image D
1
i
with lots of noise.
After filtering with a BF the noise in D
2.2
i
is re-
duced but still clearly visible. The edges around the
ears show aliasing effects, but also no texture was
copied into the depth image. In contrast, the JBF re-
duces much more noise in D
2.1
i
and also aliasing at
the edges of the ear is not visible anymore. However,
texture was copied into the depth image as visible in
Figure 5 (k). Here, the 3D structure contains the bor-
ders of the characters in Figure 5 (h), the triangle and
the rectangle. Furthermore, around the edges fine blue
is visible.
Our CBF combines the results of BF and JBF
as well as their particular advantages. The resulting
depth image D
3
i
has a lower level of noise, shows
no aliasing effects and contains no texture in its 3D
structure. There is only one drawback left: around
the depth discontinuities, e.g. at the ears, fine blur is
still visible.
Our DDP post processing in D
4
i
removes the fine
blur in edge regions and still aliasing effects are
avoided. This is even better visible in 3D in Figure
4. Without DDP a non-existing transition between
the two distant depth levels is introduced, whereas
with DDP this connection is completely corrected.
Note, the wrong pixels in the transition area are not
removed but corrected in their position. However, the
DDP slightly reduces the effect of smooth filtering in
flat regions (Figure 5 (m)). This is due to the fact
that DDP outputs only values, which are present in a
neighborhood and these values must not be optimal
for smoothing, especially in flat regions.
In our evaluation setup the whole filter runs two
iterations - each doubling the resolution - to achieve
the final resolution. The output D
out
is a high reso-
lution depth image with essentially reduced noise, no
aliasing effects, no texture copying and very sharply
preserved edges.
4.3 Quantitative Evaluation
After qualitatively evaluating our results in the previ-
ous section, we quantify the quality of our algorithm
in this section. Therefore, we conduct a ground truth
comparison as specified in Section 4.1 and compare
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
10
(a) Whole Image.
(b) Edge Regions.
(c) Flat Regions.
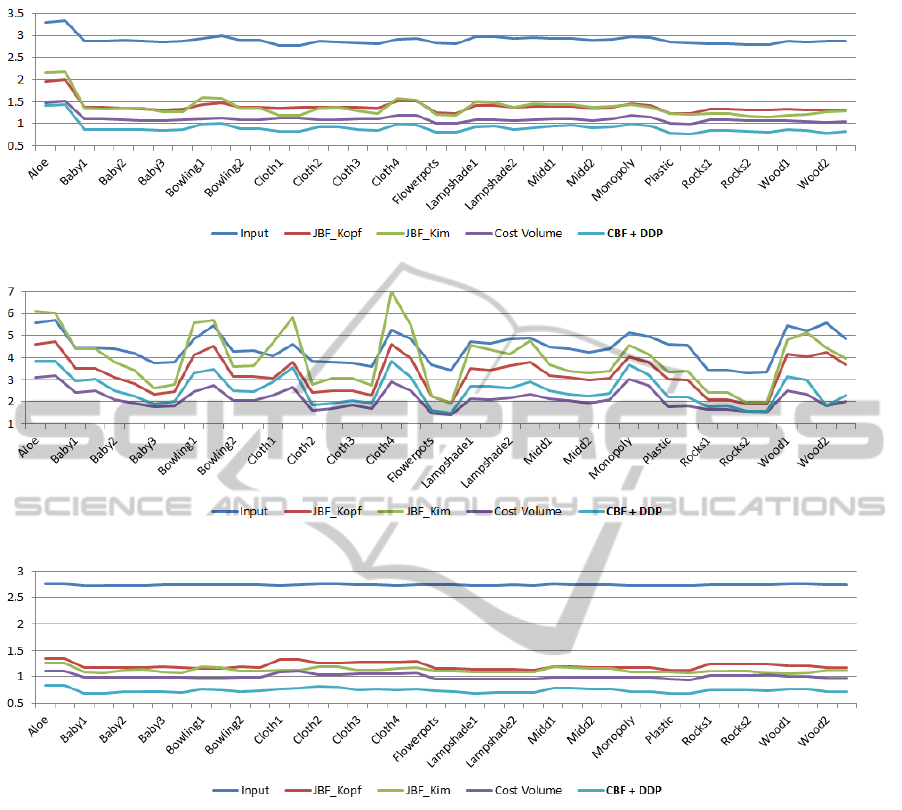
Figure 6: Mean Error (see Equation 7) for all datasets of (Scharstein and Szeliski, 2003) in denoted regions.
the results with competitive algorithms.
Figure 6 shows the Mean Error (ME) for three
kinds of image regions of all 42 datasets of
(Scharstein and Szeliski, 2003). In the whole image
both JBF
Kop f
and JBF
Kim
can halve the ME compared
to the input, whereas the Cost Volume approach re-
duces the ME by around 60%. Our algorithm on the
other hand is able to reduce the ME by up to 73%.
In edge regions our algorithm (ME ≈ 2.5) performs
slightly worse than the Cost Volume (ME ≈ 2.1),
but still better than JBF
Kop f
(ME ≈ 3.2) and JBF
Kim
(ME ≈ 3.9). However, the Cost Volume has a high
complexity, meaning that our algorithm is the best
performing of the real-time capable algorithms. In flat
regions, which contain most pixels, our algorithm is
superior compared to all other evaluated algorithms.
In Table 2 the Error Rate (ER) in % is used as quality
measure and the results are similar to the ME.
To enable the real-time performance of our CBF
filter including the DDP post processing we ported
our code to the GPU. Since the GPU offers a fast par-
allel computing and our algorithms are calculated for
each pixel independently, we achieve without exces-
sive GPU optimization an performance gain of up to
2000× compared to the CPU. In our evaluation setup
(see Section 4.1) we are able to upsample a depth im-
age with our CBF including DDP within around 30
milliseconds on a NVIDIA GeForce GTX 660 Ti. The
parallel computation of both the BF and the JBF is
very effective and takes in our implementation only
around 10% more calculation time than one single fil-
ter. As long as the GPU provides enough parallel pro-
CombinedBilateralFilterforEnhancedReal-timeUpsamplingofDepthImages
11
Table 2: Error Rate (see Equation 8) in % for a representative selection of datasets of (Scharstein and Szeliski, 2003) in
denoted regions.
Dataset Input JBF
Kop f
JBF
Kim
Cost Volume CBF + DDP
all edge flat all edge flat all edge flat all edge flat all edge flat
Aloe 46.4 49.7 45.7 18.2 35.1 14.3 14.2 44.4 7.2 9.2 14.8 7.9 9.3 27.4 5.2
Baby3 45.9 47.6 45.7 11.8 24.6 10.1 5.9 25.4 3.4 6.2 13.6 5.2 5.0 17.2 3.5
Bowling2 45.7 48.4 45.4 11.7 26.6 10.2 5.7 26.2 3.6 6.0 12.5 5.3 4.9 19.8 3.3
Cloth4 45.7 49.4 45.4 14.3 33.4 12.7 7.0 44.9 4.1 7.6 14.7 7.0 5.4 30.7 3.4
Flowerpots 45.6 46.9 45.5 10.3 21.4 9.2 4.5 18.6 3.1 5.2 10.7 4.6 3.8 14.0 2.8
Midd2 45.9 48.2 45.6 11.5 25.8 10.0 6.9 26.2 4.9 5.8 10.5 5.4 5.8 18.2 4.5
Rocks1 45.9 48.9 45.5 12.9 24.3 11.7 5.8 25.3 3.7 6.9 14.7 6.1 4.7 17.3 3.3
Wood2 45.6 46.7 45.6 10.5 24.8 9.9 3.8 24.4 2.8 5.2 8.8 5.0 3.2 14.9 2.6
cessing units, the processing time does not increase
for higher resolutions. However, in general the pro-
cessing time is linear to the resolution and quadratic to
the radius of the neighborhood N around a processed
pixel.
5 CONCLUSION
The proposed Combined Bilateral Filter (CBF) to-
gether with the new Depth Discontinuity Preservation
(DDP) post processing is able to upsample a noisy
depth image in real time with the guidance of a color
image. Our CBF filter explicitly avoids texture copy-
ing and the DDP preserves edges very sharply. The
output of our algorithm is a high resolution depth
image with essentially reduced noise and no alias-
ing effects. Compared to existing algorithms such
as JBF
Kop f
(Kopf et al., 2007), JBF
Kim
(Kim et al.,
2011) and Cost Volume (Yang et al., 2007) we over-
all achieve superior results with our algorithm. Our
algorithm is able to reduce the mean error within
around 30ms up to 73% in a ground truth comparison.
Furthermore, our algorithm can be used as a stand-
alone pre processing for existing algorithms whenever
depth images are needed as an input.
ACKNOWLEDGEMENTS
This work was partially funded by the Federal Min-
istry of Education and Reseach (Germany) in the
context of the projects ARVIDA (01IM13001J) and
DENSITY (01IW12001). Furthermore, we want to
thank Vladislav Golyanik for his advise in GPU pro-
gramming.
REFERENCES
Aodha, O. M., Campbell, N. D., Nair, A., and Brostow,
G. J. (2012). Patch based synthesis for single depth
image super-resolution. In Proceedings of the Euro-
pean Conference on Computer Vision (ECCV), pages
71–84. Springer.
Canny, J. (1986). A computational approach to edge detec-
tion. In Transactions on Pattern Analysis and Machine
Intelligence (PAMI), volume 6, pages 679–698. IEEE.
Cui, Y., Schuon, S., Chan, D., Thrun, S., and Theobalt, C.
(2010). 3D shape scanning with a time-of-flight cam-
era. In Conference on Computer Vision and Pattern
Recognition (CVPR), pages 1173–1180. IEEE.
Diebel, J. and Thrun, S. (2005). An application of markov
random fields to range sensing. In Advances in neural
information processing systems (NIPS), pages 291–
298. NIPS.
Kim, C., Yu, H., and Yang, G. (2011). Depth super resolu-
tion using bilateral filter. In International Congress on
Image and Signal Processing (CISP), volume 2, pages
1067–1071. IEEE.
Kopf, J., Cohen, M. F., Lischinski, D., and Uyttendaele, M.
(2007). Joint bilateral upsampling. In ACM Transac-
tions on Graphics (TOG), volume 26, page 96. ACM.
Scharstein, D. and Szeliski, R. (2003). High-accuracy
stereo depth maps using structured light. In Con-
ference on Computer Vision and Pattern Recognition
(CVPR), volume 1, pages 1–195. IEEE.
Schuon, S., Theobalt, C., Davis, J., and Thrun, S. (2009).
LidarBoost: Depth superresolution for ToF 3D shape
scanning. In Conference on Computer Vision and Pat-
tern Recognition (CVPR), pages 343–350. IEEE.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color images. In International Conference
on Computer Vision (ICCV), pages 839–846. IEEE.
Yang, Q., Yang, R., Davis, J., and Nist
´
er, D. (2007). Spatial-
depth super resolution for range images. In Con-
ference on Computer Vision and Pattern Recognition
(CVPR), pages 1–8. IEEE.
VISAPP2015-InternationalConferenceonComputerVisionTheoryandApplications
12
