A Parametric Space Approach to the Computation of Multi-scale
Geometric Features
Anthousis Andreadis, Georgios Papaioannou and Pavlos Mavridis
Department of Informatics, Athens University of Economics and Busines, Athens, Greece
Keywords:
Geometric features, Parametric space, Mesh geometry.
Abstract:
In this paper we present a novel generic method for the fast and accurate computation of geometric features
at multiple scales. The presented method works on arbitrarily complex models and operates in the parametric
space. The majority of the existing methods compute local features directly on the geometric representation
of the model. Our approach decouples the computational complexity from the underlying geometry and in
contrast to other parametric space methods, it is not restricted to a specific feature or parameterization of the
surface. We show that the method performs accurately and at interactive rates, even for large feature areas of
support, rendering the method suitable for animated shapes.
1 INTRODUCTION
Geometric features, like curvature and surface rough-
ness, are central to demanding computations in a wide
range of applications, including object retrieval and
registration, texture synthesis, stylized rendering and
many more. The computation of these fundamental
metrics is usually performed by CPU algorithms that
operate on a discrete polygonal representation of a
continuous surface. These metrics can be precom-
puted for static meshes, but their fast computation
even for moderately large or dynamic meshes, is chal-
lenging.
In this paper we focus on the general class of met-
rics with finite local support, whose computation de-
pends on the local neighborhood of an arbitrary point
p on the object’s surface. Robustness in the presence
of noise is achieved through multi-scale computation
of the features (Yang et al., 2006). To this end, a
data structure that encodes the adjacency information
is required, in order to efficiently locate the neigh-
boring points on a surface. This is especially true
for algorithms that operate on meshes. The compu-
tational complexity of such an object-space approach
is directly proportional to the geometric density and
quadratic with respect to the extent (i.e. radius) of
the local feature support. Despite the fact that com-
puting the metric for independent surface points is an
inherently parallel task, the use of complex data struc-
tures for storing the adjacency information prevents a
trivial and efficient mapping of these computations to
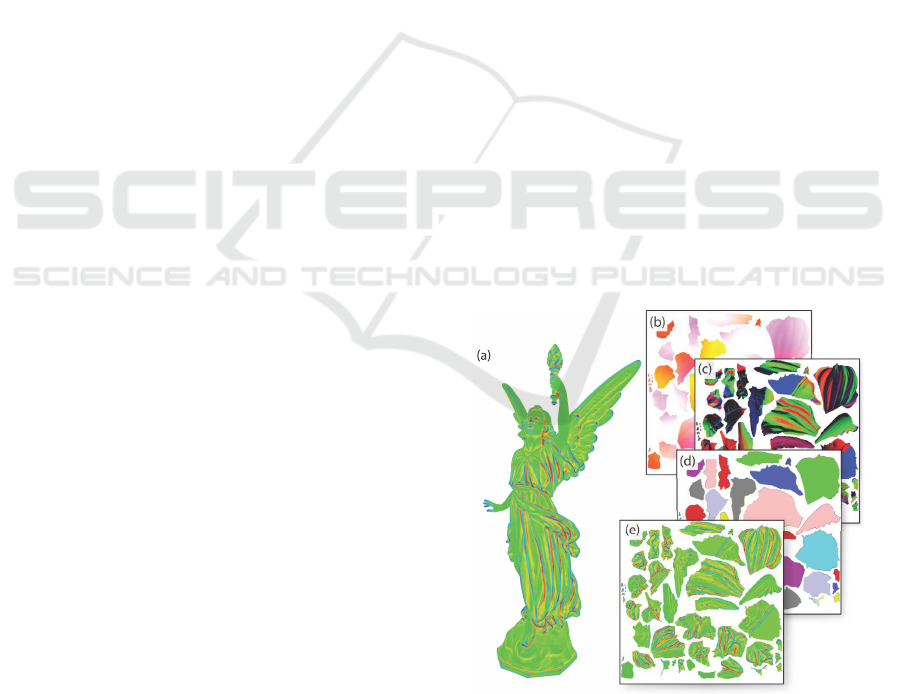
Figure 1: a) ”Lucy” model (200K) colorized with mean cur-
vature, computed in 49ms, b) geometry (position) buffer
(normalized for visualization), c) surface normal buffer, d)
polygon chart identifiers (colorized for clarity) along with
the adjacent chart identifiers on border pixels, e) mean cur-
vature in parametric space (colorized for visualization).
massively parallel stream processors, like commod-
ity GPUs, at an arbitrary neighborhood scale. For
these reasons, real-time computation is often limited
to meshes with relatively low geometric complexity
and 1-ring vertex neighborhoods(Griffin et al., 2011).
Our approach for local feature computation shifts
all calculations from object-space to parametric
space, by transferring all the geometric data of the
5
Andreadis A., Papaioannou G. and Mavridis P..
A Parametric Space Approach to the Computation of Multi-scale Geometric Features.
DOI: 10.5220/0005225700050015
In Proceedings of the 10th International Conference on Computer Graphics Theory and Applications (GRAPP-2015), pages 5-15
ISBN: 978-989-758-087-1
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

object to a two-dimensional layout, along with extra
adjacency information that allows us to reconstruct
the object-space local neighborhood of a given point
on the fly. While this choice is similar to Geome-
try Images (Gu et al., 2002), we do not restrict our
method to a specific parameterization method, but
rather develop a scheme that can handle any under-
lying parameterization, including multi-chart layouts.
The benefits of parametric-space feature calculations
are twofold: First, sampling the geometry at arbitrar-
ily large areas of support is much more efficient in
parametric space, since the samples can be directly
indexed in contrast to a geometry-based estimation,
where the traversal of a surface patch is performed
via the connectivity information of the vertices. Sec-
ond, the parametric space computations are directly
mapped to the GPU/many-core computing paradigm
in a very efficient manner, rendering the approach
suitable for real time calculations over deformable or
animated objects.
2 RELATED WORK
Most methods in the bibliography concentrate on the
computation of a specific geometric feature, and do
not generalize their framework to encompass more
features. Since our method is more generic, for our
overview, we focus on the way each method samples
the geometric information of the object, instead of
the particular feature computation. Existing methods
can be classified to those that sample the geometry in
object-space, screen space, a volumetric representa-
tion and parametric space. In the remainder of this
section we will review the main representatives for
each category.
Object-space methods operate directly on the ge-
ometry of the mesh. (Taubin, 1995) and (Meyer
et al., 2003) generalize the differential-geometry-
based definition of curvatures to discrete meshes but
their computations are limited to 1-ring neighbor-
hoods which renders them sensitive to noise. Sim-
ilarly (Rusinkiewicz, 2004) estimate the curvature
over meshes using essentially a 2-ring neighborhood.
For efficient arbitrary neighborhoods (support re-
gions), object space methods require a data structure
that encodes the adjacency information between the
triangles of the mesh, such as the half-edge (Cam-
pagna et al., 1998) or a kd-tree data structure. How-
ever, as discussed in the introduction, a mapping of
this data structure to the GPU is neither trivial nor
optimal. Most feature computation methods belongs
to this category and thus operate on the CPU. GPU-
based methods, have been proposed for the computa-
tion of specific features, like curvature (Griffin et al.,
2011), but these methods do not generalize to the sam-
pling of arbitrary neighborhoods.
Screen Space methods sample the geometric infor-
mation of a mesh from a 2D pixel buffer, where each
pixel encodes the projected surface position of the
mesh from a specific point of view. In this case, adja-
cency information is implied by the pixel grid, there-
fore sampling is trivial and can be efficiently mapped
to GPUs. This efficiency in sampling is also the main
motivation behind our method. The main disadvan-
tage of screen-space methods is that computations are
limited to the surface points visible from a particular
view, resulting in inaccuracies near occluded points
and at the screen-space silhouettes of the object. Such
screen-space methods have been proposed for curva-
ture estimation in real-time stylized rendering (Mel-
lado et al., 2013), (Kim et al., 2008). Our method
retains most of the sampling efficiency of the screen-
space methods, but avoids the view-dependence of the
results by moving all the computation to the paramet-
ric space.
Volumetric data and algorithms can be also employed
for feature computations. In this case, the input mesh
is initially converted to a volumetric representation,
such as a level set, and then geometric features are
computed by sampling this representation, instead of
the original mesh. Finally, the results of these calcula-
tions are mapped to the original mesh. The advantage
of this approach is that the computational complex-
ity does not depend on the underlying geometry but
rather on the new volumetric representation, where
sampling a local neighborhood around a surface point
is often more efficient than sampling the same neigh-
borhood on the original geometry. Features, like cur-
vature, can be quickly approximated using the gra-
dient field of the object, as described in the Open-
VDB (Museth, 2013) or by using convolutions, which
can be accelerated using FFT as shown in (Pottmann
et al., 2007). The disadvantage of this approach is
that an efficient voxelization method is required, addi-
tional memory is consumed for the storage of the vol-
umetric format and most importantly, the computa-
tions are based on a volumetric discretization, which
is a more rough representation of the original surface
than the triangular mesh. Furthermore, certain fea-
tures when computed on volumetric data, are incom-
patible with the results of the respectivesurface-based
measurements, especially for non-manifold surfaces.
Parametric Space. Finally, specific methods have
been proposed for parametric space as well. Meth-
ods in this category rely on a the unwrapped sur-
face of the model on a 2D plane. Using this rep-
resentation, computational complexity is decoupled
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
6

from the underlying geometry and additionally, sev-
eral image analysis techniques can be applied intu-
itively to 3D data. To our knowledge, so far there has
been no practical and generic approach that would al-
low both geometric and image space features to be
computed efficiently, as existing methods focus on
applying image space techniques only. (Novatnack
and Nishino, 2007) propose a method for corner and
edge detection that requires a user-driven single chart
parametrization. Furthermore, to handle points ly-
ing near the perimeter of charts, the authors construct
complementary parameterizations, for which bound-
ary regions are then mapped to internal chart loca-
tions. (Hua et al., 2008) describe another method
that locates extrema using a scale space representa-
tion. Their method relies on a specialized conformal
mapping and expects pre-computed per-vertex values
of mean-curvature and geodesic distance. In contrast,
our method does not rely on a specific parameteriza-
tion approach, nor does it require any pre-computed
features.
3 METHODOLOGY
Our method operates on fully parameterized geom-
etry but does not rely on a specific method for this
task. Initially, we perform a pre-processing step in
order to locate the surface edges of the polygonal rep-
resentation, which are mapped to discontinuous re-
gions in parametric space. This is usually part of the
model loading process. In real-time, we create the
parametric-space representation of the geometry, aug-
mented by the adjacency information and perform the
feature computation of discrete locations in paramet-
ric space, i.e. on a texture buffer. During this step,
we utilize the information stored in our geometry and
adjacency buffers in order to index arbitrary surface
samples in the neighborhood of a point p, regard-
less of its parametric mapping. The measured metrics
can be then queried per vertex, using standard texture
look-up operations, or used directly in image space,
e.g. to extract salient features and local image-space
descriptors. In the rest of this section we will present
in detail each one of the above steps.
3.1 Surface Parameterization
Surface parameterization as (Floater and Hormann,
2005) explain, can be viewed as a one-to-one map-
ping from a suitable domain to a surface. Our method
expects fully parameterized geometry in a normalized
2D domain. This procedure is also known as (bijec-
tive) uv-mapping and the resulting surface patches are
Figure 2: The ”bunny” model with two parameterizations,
resulting in different set of charts.
referred to as charts or uv-islands (see Figure 1(d),
and 2). The area of surface parameterization has been
extensively researched in the past years, (Floater and
Hormann, 2005), (Sheffer et al., 2006) and the min-
imization of stretch distortion has been the goal of
several works, such as that of (Sander et al., 2001),
(Yoshizawa et al., 2004) and (Zhou et al., 2004).
Therefore, we do not address this part in our work,
but rather rely on existing methods and solutions.
3.2 Pre-processing Operations
In any local feature estimation technique, we need to
calculate an operator F(p,S(p)) at a point p, given a
neighborhood x ∈ S(p), x satisfying a set of criteria,
such as a maximum Euclidean or geodesic distance
from p, or the n-ring adjacency of x to p (max. n
vertex graph distance). These relations in geometric
space are easily represented using data structures with
topology. For a review of the existing geometric data
representations, see the work of (De Floriani and Hui,
2005).
On the other hand, when operating in 2D paramet-
ric space, the connectivity information is implied by
the adjacency of neighboring pixels. However, this is
not true on the borders of charts, where adjacent ge-
ometry is mapped to discontinuous locations in para-
metric space (see example in Figure 3). In this case,
additional information should be stored at the bor-
der pixels to keep track of the hops to geometrically-
adjacent pixels in different charts.
In order to appropriately annotate the chart pixels,
mesh vertices located at the borders of charts must be
first identified and the link to the geometrically adja-
cent vertices on different charts has to be stored on the
affected vertices. Details regarding the information
stored can be found in Section 3.3. The complexity of
this step is equivalent to the pre-processing stage of
all object-space approaches for the adjacency infor-
mation generation and even for large models, it only
takes a few seconds to complete. This stage needs to
be performed only once, as the adjacency information
for topologically unchanging geometry can be stored
in the 3D model file itself.
AParametricSpaceApproachtotheComputationofMulti-scaleGeometricFeatures
7

3.3 Generation of the Data Buffers
The computation of geometric features requires a set
of attributes per sampled surface location, such as
the coordinates of p in the object’s local space and
the respective normal vector n. These data must be
transferred to the parametric space and stored in ap-
propriate buffers, i.e. a set of textures that corre-
spond to the normalized parametric space of the un-
wrapped geometry. The buffers also store the iden-
tifier of the polygon chart that p belongs to. The
object-space position of surface points is stored in a
geometry buffer P(u, v), the normal vectors are placed
in a normal buffer N(u,v), whereas the chart identi-
fiers are registered in an ID channel in the geometry
buffer (ID(u,v)). Another set of textures, compris-
ing the adjacency buffer, equal in size to the geometry
buffer, store the identifier of the adjacent chart, the lo-
cal metric distortion of the parameterization (see be-
low), the corresponding (u, v) coordinates on the ad-
jacent chart, as well as the relative scale and rotation
between the two charts. An example of the data chan-
nels for the position, normal and current and adjacent
chart identifiers is shown in Figure 1.
The buffer generation process is performed in two
steps. First, the geometric information is efficiently
generated in the GPU by rasterizing the object trian-
gles using orthographic projection, where the normal-
ized texture coordinates (u,v,1) are used as the vertex
coordinates of the mesh. The chart ID is passed as
a vertex attribute and copied for all points inside the
triangles of a chart. Similarly to (Sander et al., 2003)
we also rasterize each chart’s boundary edges in order
to avoid the generation of disconnected regions.
In the second step, we compute the local metric
distortion factors that will be used for the anisotropic
adjustment of scale and sampling direction in various
calculations. In order to do so we use the Jacobian
J
P
= (P
u
,P
v
), where P
u
and P
v
the partial derivatives
of the surface. The left-singular vectors of J
P
are
used in order to get the θ
e
angular distortion of the
anisotropic ellipse while the singular values of J
P
σ
u
,
σ
v
are the stretch factors in the u and v direction. Due
to the fact that the singular value decomposition is a
tedious task, we use the equivalent eigen decomposi-
tion of the 2x2 first fundamental form matrix:
J
T
P
J
P
=
E F
F G
, (1)
where E = (∂P(u, v)/∂u)
2
, G = (∂P(u,v)/∂v)
2
and
F = (∂P(u,v)/∂u) · (∂P(u,v)/∂v). For more informa-
tion see (Hormann et al., 2008). Additionally, in this
second pass we also store the rest of the adjacency
data. These attributes are calculated when setting up
the triangle connectivity and are simply copies to the
Figure 3: Indexing a sample inside the neighborhood of a
point. Sample t does not lie inside the chart of s. Locate
the boundary point b, read adjacency buffers and relocate
sample to adjacent chart.
adjacency buffers for the chart border pixels. While
for static objects the buffer generation step could be
performed only once, we focus on a method suitable
for deformable/animated objects, and treat it as a per-
frame event. Therefore, the reported timings in the re-
maining text include the data buffer generation over-
head.
3.4 Sampling the Neighborhood of a
Point
In order to be able to perform the calculation of a fea-
ture F(p,S(p)) in parametric space, we need to es-
tablish a procedure for drawing individual samples
from the neighborhood S(p) of p. Our approach es-
timates F(p,S(p)) in image space and therefore, for
every pixel (i, j) with a corresponding parameter pair
s = (u,v), p(u,v) is first retrieved from the geometry
buffer: p = P(u,v). Then, assuming a maximum ra-
dius of support r
max
for the local feature estimator in
object-space units, a sample t = (u
′
,v
′
) is generated in
a region A(s) in parametric space so that x = P(t) sat-
isfies the neighborhood criterion. A(s) is calculated
as an ellipse of radii (1/σ
u
(s),1/σ
v
(s)) · r
max
in the
parametric domain (upper distance bound) rotated by
θ
e
, in order to account for local angular distortion and
scale, and x is acquired with rejection sampling ac-
cording to the selected neighborhood criterion (Fig-
ure 3). The exact pattern or random distribution with
which the samples are generated is specific to the fea-
ture estimator and the generic sampling approach pre-
sented here is agnostic to it. Also, since we perform a
random sampling of the neigborhoodof s, no assump-
tion is made about the chart’s convexity.
Since the ellipse A(s) may extend beyond the
boundary of the chart containing p (Figure 3), a more
elaborate mechanism is required to handle the sam-
ples that fall outside the chart. These samples ob-
viously contribute to the result and should not be
discarded. Identifying whether the sample x at t
lands on the same chart as p is trivially resolved by
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
8

Figure 4: More examples of indexing samples. t
1
returns
to the same chart after a jump. t
2
parametric location is
located using two jumps. In the right part, chart adjacencies
are colored across the borders.
checking their respective chart identifiers ID(u,v) and
ID(u
′
,v
′
).
In the case where t lands outside the chart of p,
we utilize the parametric adjacency data stored in our
buffers to find its true location. Initially, we march
along the direction
−→
st in pixel-sized increments to lo-
cate the first pixel with the chart ID as p (boundary
point b). The adjacency buffer for a border pixel b of
a chart contains the ID of the adjacent chart and the
parametric location b
′
of the corresponding point on
it. For samples across seams of the same chart, the
ID of the adjacent buffer is identical to that of p, but
the parametric location b
′
points safely to the corre-
sponding location on the same chart (see Figure 4-t
1
).
The adjacency buffer contains also the relative chart
edge rotation θ(b → b
′
) between b and b
′
. Finally, a
non-uniform scale factor s(b → b
′
) can be calculated,
corresponding to the relative scale of the two charts
in parametric space at their border locations b and b
′
(this scale factor may vary across a chart):
s(b → b
′
) =
σ
u
(b
′
)
σ
u
(b)
,
σ
v
(b
′
)
σ
v
(b)
. (2)
Therefore, we can adjust the location of t according to
the following parametric space transformation to ob-
tain the relocated sampling position t
′
on the adjacent
chart:
t
′
= b
′
+ R
θ(b→b
′
)
S
s(b→b
′
)
(t− b), (3)
where R
θ(b→b
′
)
is the rotation matrix of angle θ(b →
b
′
) and S
s(b→b
′
)
is the non-uniform scale matrix of
factor s(b → b
′
). In case t
′
lands outside the expected
chart, the same search is performed similarly in the
−→
sb
′
direction (see Figure 4-t
2
). The sample reloca-
tion procedure is shown in Figure 3. Note that the full
non-rigid transformation of t corresponds to the adap-
tation of the initial sampling ellipse to the new charts.
Therefore, if no severe stretching is present, S(p) is
properly covered.
A useful side-effect of the parametric-space com-
putation is that feature estimation can take into ac-
Figure 5: Monte Carlo Sampling in current and adjacent
charts described in Section 4.1.
count displacement and normal mapping. In the spe-
cial case of displacement mapping, our method could
be easily adopted in order to handle the changes in
the geometry that could break the neighborhood esti-
mation heuristic. Points lying within the initial Eu-
clidean neighborhood that stretch out of it due to
the displacement are automatically handled by mea-
suring the Euclidean distance from p. The problem
arises when point with initial location outside the Eu-
clidean neighborhood of p fall within r
max
after dis-
placement. By scaling σ
u
and σ
v
with the maximum
expected displacement distortion, which is usually a
user defined parameter, the method successfully han-
dles these points as well.
Finally, we need to clarify that if our method fo-
cused only on single chart parameterizations such as
Geometry images (Gu et al., 2002) we could avoid
highly irregular transitions and in this way reduce the
complexity of our operations. On the other hand,
multi-chart parameterizations offer an added flexibil-
ity that can be used to reduce distortion, particularly
for shapes with long extremities, high genus, or dis-
connected components (Sander et al., 2003) (see Fig-
ure 13).
4 ESTIMATION OF INTEGRAL
FEATURES
Central to many geometric feature computations is
the estimation of surface and volume integrals in the
neighborhood of p. Integral invariant features for in-
stance, are often used in the formulation of local de-
scriptors (Huang et al., 2006), or provide the means
to estimate differential invariants such as the mean
curvature H (see (Connolly, 1986) and (Manay et al.,
2004)).
We estimate integrals in a neighborhood S(p)) us-
ing Monte Carlo integration in parametric space and
in Section 5 we use this approach to compute a va-
riety of integral and differential features interactively
for arbitrary feature scales.
AParametricSpaceApproachtotheComputationofMulti-scaleGeometricFeatures
9

4.1 Monte Carlo Integration
In parametric space, the generated data buffers hold
not only the vertex information but also all inter-
nal polygon samples, generated by the GPU through
linear interpolation during rasterization. Utilizing
Monte Carlo integration with a uniform distribution
in the parametric domain, any integral I(p) of a func-
tion g(p) over S(p) can be approximated by:
hIi(p) =
A
′
(s)
N
N
∑
i=1
g(P(t
i
)), (4)
where A
′
(s) is the portion of the elliptical sampling
area A(s) centered at parameter pair s corresponding
to the central point p = P(s) after rejection sampling
with the criterion of neighborhood S(p) (e.g. Eu-
clidean distance of P(t) to p) and N is the number of
valid samples. While performing a similar sampling
on the geometry itself would require area-weighted
probabilities, the parametric-space values can be sam-
pled uniformly, assuming of course a low-distortion
parameterization.
Random samples are generated uniformly using a
stratification scheme. Uniform samples in the cells of
a planar grid are transformed to disk samples using
the concentric mapping of (Shirley and Chiu, 1997).
The disk samples are anisotropically scaled along the
u and v axes to form the elliptical region A(s), accord-
ing to the distortion factors discussed in Section 3.3.
The same samples are used at each pixel, randomly
rotating them to avoid statistical noise.
The elliptical region A(s) is an approximation that
favors fast computations. A more refined but rather
more computationally expensive approach would be
to pre-compute the maximal distortion for discretized
polar coordinates at each pixel and subsequently
anisotropically scale each random sample according
to the closest distortion term from its conversion to
polar coordinates. Nevertheless, as demonstrated in
the experiments, the elliptical approximation proved
to be both robust and efficient, even for large neigbor-
hoods.
Given a point p and its location in parametric
space s, initially we perform computations only for
the samples that lie on the same chart as p (Figure 5
- right). At the same time, for all parametric-space
samples that fall outside the chart, we mark the ID of
the chart they land on. Subsequently, we compute for
each marked chart the transformed parametric posi-
tion s
′
of the central parametric pair s and repeat the
sampling procedure on the new location, using the
entire sampling pattern (Figure 5 - left). Only sam-
ples falling within the new chart are accounted for and
contribute to the final integral. The marking of charts
and the central point transformation is done according
to the procedure described in Section 3.4.
The sampling scheme described above is generic
and could be implemented for an arbitrary number of
jumps, excluding each time the already visited charts.
In our experiments we noticed that, no more than
one jump per sample point was typically required,
even for large-scale local feature neighborhoods. Of
course, this also depends on the size of the charts pro-
duced by the parameterization. For example, in Fig-
ure 2, where the bunny model is shown in two dif-
ferent parameterizations, for the left one we reported
the first missing sample using a support area of 10%
the object’s diagonal. Conversely, for the one on the
right we did not report any missing samples even for
neighborhoods larger than 16% the object’s diagonal.
4.2 Adaptive Sampling
Since g(x) is a function of the surface geometry,
smooth areas of the objects, i.e. areas with smaller
variance of the evaluated function g(x), give satis-
factory results even when dropping the sampling rate
significantly. This fact is an opportunity for a speed-
up, given that computation time is proportional to
the number of samples drawn, so we exploit adaptive
sampling to this end.
Typically, adaptive sampling methods continue to
draw random samples, until the variance of the com-
puted quantity falls below a certain threshold. In our
method however, we perform a simplified, two-step
adaptive sampling, instead of waiting for the variance
to converge: We first compute the integral with N/2
samples and measure the variance. For those points p
for which the variance of g(x) is greater than a prede-
termined threshold, we use an additional set of N/2
random samples. Using a fixed, two-stage adaptive
sampling creates exactly two different GPU execu-
tion loads, generally coherent across the output buffer,
thus maximizing shader core utilization and perfor-
mance.
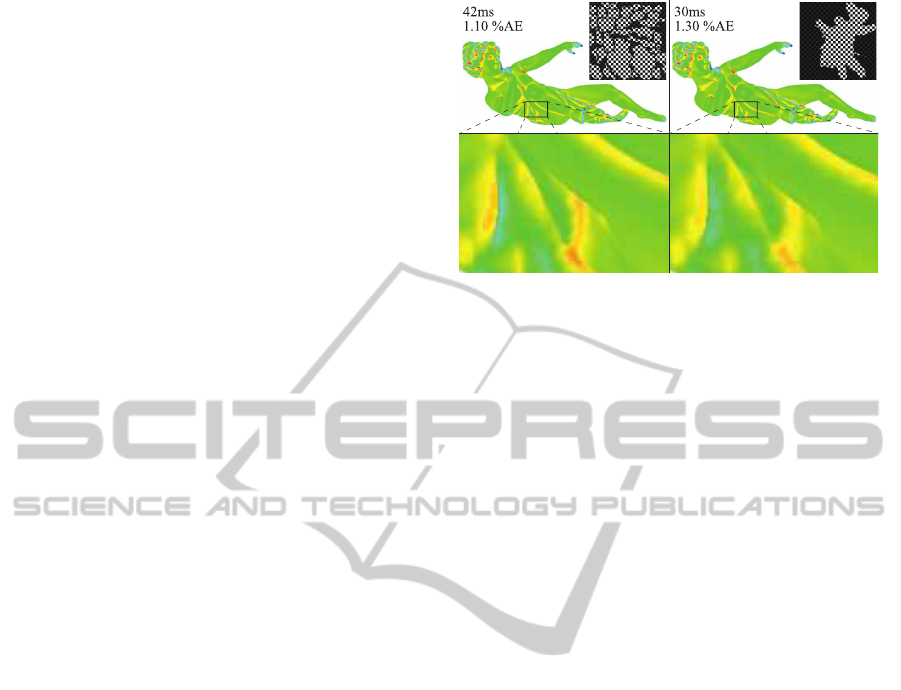
Our experiments show that as the number of sam-
ples increases, the difference of % Absolute Error (%
AE) between the full and adaptive sampling declines,
while at the same time the performance savings in-
crease. (see Table 1 and Figure 6).
5 PERFORMANCE AND
QUALITY EVALUATION
In this section we present a number of local geo-
metric feature operators using our method and pro-
vide a qualitative comparison against respective ref-
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
10
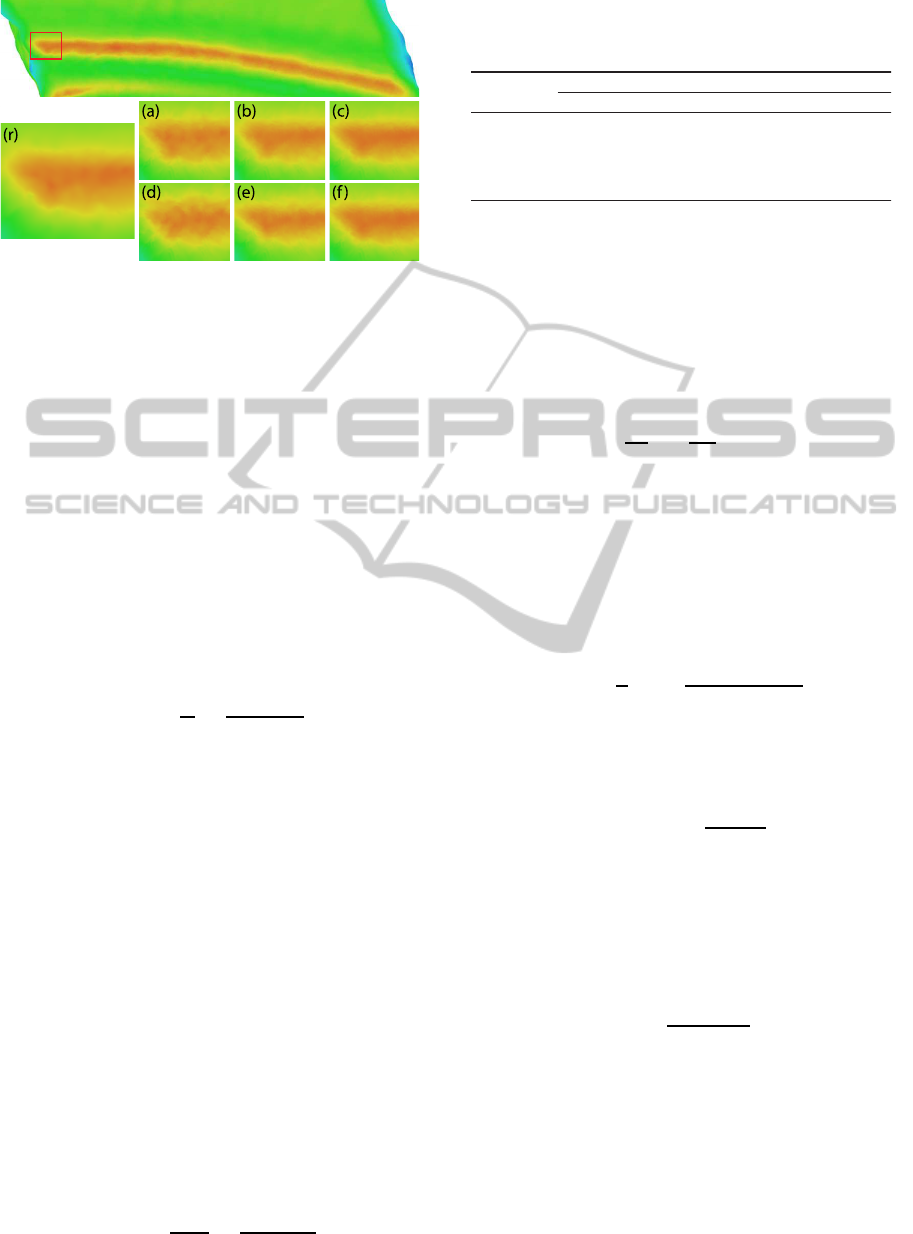
Figure 6: Comparison of mean curvature for Full and Adap-
tive Sampling. (r) Reference (a), (b), (c) Full Sampling us-
ing 64, 100 and 256 samples in respect. (d), (e), (f) Adaptive
Sampling using 32/64, 64/128 and 128/256 samples.
erence CPU algorithms that operate directly on the
polygonal geometry using the Halfedge data-structure
(HE) (Campagna et al., 1998).
5.1 Implemented Local Features
Local Bending Energy (LBE). (Huang et al., 2006)
in order to classify a surface as fractured or intact in
their fragment reassembly framework define the LBE
term e
k
(p) for the k nearest vertices to a surface lo-
cation p. Similarly, given an Euclidean neighborhood
q
i
∈ S(p,r) : kq
i
− pk ≤ r with corresponding normal
vectors n
i
, LBE e
r
(p) can be defined as:
e
r
(p) =
1
N
N
∑
i=1
kn− n
i
k
2
kp− q
i
k
2
, (5)
where n is the normal at the central point p and
N is the number o samples taken in the S(p,r)
neighborhood.
Sphere Volume. (McGuire et al., 2011) presented
a stochastic solid angle computation for the approx-
imation ambient occlusion in the hemisphere above
a point p. Inspired by this idea, we extend it to a
full sphere and compute a fast approximation of the
unoccupied volume of a sphere of radius r centered
at p. Assuming a smoothly varying tangential eleva-
tion around p, the vector q
i
− p from the central point
to any sample q
i
within the Euclidean neighborhood
S(p,r) approximates the horizon in this direction with
respect to the normal vector n at p at a distance scale
equal to kq
i
− pk. Taking a uniform rotational and ra-
dial distribution of samples (direction and scale) q
i
in
S(p,r), we can approximate the open volume V
o
(p)
above p by:
V
o
(p) =
4πr
3
3N
N
∑
i=1
(q
i
− p)n
kq
i
− pk
. (6)
Table 1: Computation Time and % Absolute Error for Full
and Adaptive Sampling over the same metric. Error in com-
parison to reference CPU implementation.
Samples
Full Adaptive
Time
% AE
Time
% AE
64 17.57ms 1.172 15.94ms 1.331
100
22.17ms
1.035 19.54ms 1.110
256 50.54ms 1.005 41.44ms 1.007
400 74.21ms 0.789 61.75ms 0.824
The sphere volume integral invariant, i.e. the part of
the sphere volume of radius r ”inside” the surface at
p (Pottmann et al., 2009) is the complement of the
above integral quantity.
Mean Curvature (MC). (Hulin and Troyanov, 2003)
derive the relation of MC to the sphere volume inte-
gral invariant as:
V
r
(p) =
2π
3
r
3
−
πH
4
r
4
+ O(r
5
), (7)
from which we can directly compute MC H at p for a
given radius r.
Shape Index (SI). Introduced by (Koenderink and
van Doorn, 1992), SI is a local descriptor that com-
bines the principal curvatures (PC) in order to classify
the locale shape of the surface. SI is a normalized de-
scriptor and for a given surface point p is defined as:
S(p) =
2
π
arctan
K
2
(p) + K
1
(p)
K
2
(p) − K
1
(p)
, (8)
where K
1
(p), K
2
(p) are the principal curvatures at p.
In order to calculate the K
1
and K
2
, we rely on
their relation to mean curvature H and Gaussian cur-
vature (GC) K:
K
1,2
= H ±
p
H
2
− K. (9)
The computation of H was discussed earlier. For the
GC we rely on the work of (Bertrand et al., 1848)
that relates K with the perimeter and surface area of
a geodesic disk on a surface. In particular, we utilize
the formula that uses the geodesic area GA of distance
r:
K = 12
πr
2
− GA
r
πr
4
. (10)
The only unknownparameter now is the geodesic area
GA
r
at a given distance r. In the case of the geo-
metric evaluation, we sum the Voronoi area of each
vertex within a neighborhood of geodesic distance r.
For the parametric-space computation of GA
r
, we first
draw a number of samples N
tot
in the Euclidean neigh-
borhood of p (see Section 4.1). Then, for each sam-
ple q
i
at parametric location t
i
, the geodesic distance
to p is approximated by a sum of chords at P(s
j
),
AParametricSpaceApproachtotheComputationofMulti-scaleGeometricFeatures
11
13600ms 129ms
%AE: 1.17
Arc
900K Triangles
250x170x136mm
5mm Radius
Armadillo
345K Triangles
126x115x152mm
2mm Radius
2130ms 134ms
%AE: 1.88
Parametric SpaceReference
9410ms 47ms
%AE: 0.81
Arc
900K Triangles
250x170x136mm
6mm Radius
XYZ RGB Dragon
200K Triangles
200x132x90mm
3mm Radius
397ms
52ms
%AE: 1.89
624ms 28ms
%AE: 1.18
Embrasure
200K Triangles
340x334x330mm
10mm Radius
Armadillo
345K Triangles
126x115x152mm
3mm Radius
1420ms
55ms
%AE: 1.41
Parametric SpaceReference
113ms 21ms
%AE: 0.31
Embrasure
200K Triangles
340x334x330mm
3mm Radius
Lucy
200K Triangles
345x134x400mm
6mm Radius
360ms 57ms
%AE: 1.08
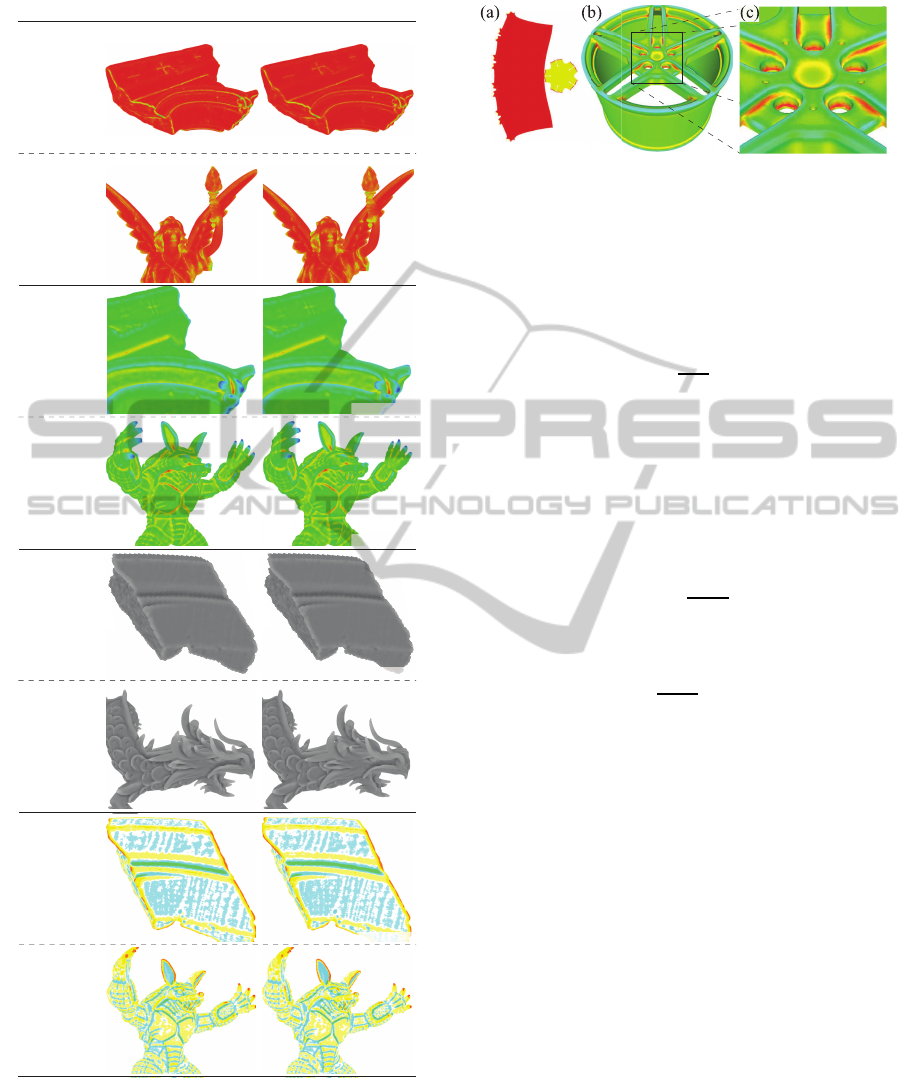
Localized Bending EnergyMean CurvatureShape Index Normalized Sphere Volume
Figure 7: Comparative visualization, timings and % Ab-
solute Error for the implemented geometric features (Sec-
tion 5.1).
i.e. at the intermediate parametric space coordinates
s
j
= t
i
+ j(s − t
i
)/N
steps
, where s are the uv coordi-
nates of p and N
steps
is the number of chords. Depend-
ing on the local distortion of the parameterization,
Figure 8: Genus 20 Rim model. a) Parametric space charts.
b) Mean Curvature colorized for the same neighborhood
computed in 58ms. c) Zoom to detail.
P(s
j
) may not reside exactly on the same plane. Ac-
cording to the computed geodesic distance between q
i
and p, a final set of N
g
samples is retained, N
g
≤ N
tot
,
and GA
r
is estimated by:
GA
r
=
N
g
N
tot
EA
r
, (11)
where EA
r
is the Euclidean area.
Euclidean area can be approximated in the follow-
ing way. Let P
tot
be the total number of pixels in
the elliptical region. Given the ratio of the samples
that satisfy the Euclidean criterion to the total sam-
ples N
A(s)
/N
tot
, and A
q
m
the mean area represented by
each sample in A(s), we approximate EA
r
as:
EA
r
= P
tot
N
A(s)
N
tot
A
q
m
, (12)
A
q
m
is given by the formula:
A
q
m
=
1
N
A(s)
N
A(s)
∑
i=1
A
q
i
, (13)
where A
q
i
is the product of the distortion factors
l
u
(u,v), l
v
(u,v).
5.2 Results and Discussion
We have tested our generic parametric-space feature
estimation method using a large variety of objects,
ranging from simple geometric shapes to complex and
detailed 3D scanned models. Indicative results can be
seen in Figure 7 and Figure 8, where we report an av-
erage of 49× acceleration and 1.245% Absolute Error
(AE) relative to the reference CPU method described
below. Please note that in such comparisons, report-
ing maximum error is not indicative of the method’s
performance, since a slight mismatch in the represen-
tation at a single point due to parameterization can
cause an isolated but inconsequential measurement
difference. Timings of our method do not include the
parameterization and the charts boundary edge detec-
tion. Similarly, timings of the reference method do
not include the Half-Edge (HE) data structure gen-
eration. It is importnat to mention here that while
geometric algorithms for computing features operate
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
12

Table 2: Average Computation time and % Absolute Error
over a set of models for the same metric over different res-
olutions and buffer precision. Error in comparison to the
reference CPU implementation.
on discretized values at a vertex or triangle level, the
parametric space calculations can exploit interpolated
values at arbitrary surface locations. Therefore, the
measurement deviations that are reported here as er-
rors, mostly stem from the different approximation
and sampling of the underlying surface. Timings for
the GPU parametric implementation are shown for an
NVIDIA GTX 670 GPU. We use 1024x1024 floating
point texture buffers, while metrics are computed over
a 512x512 buffer with 256 samples per pixel unless
stated otherwise. The reference geometric algorithm
results are shown for a Corei7-3820 system (4 cores
@ 3.60GHz, 8 threads) with 16GB of RAM and our
implementation uses the OpenMP API and takes ad-
vantage of the current generation multi-core CPU’s.
The efficiency of our method is attributed to the
shift of the computations from a topology-detail-
dependent representation to two dimensions with
application-controlled (sampling) quality settings,
which enables very good scaling for multi-core and
many-core architectures. The proposed implemen-
tation is tailored for (but not limited to) commodity
GPUs.
Geometric Detail. In Figure 9 we present compar-
ative results computed over a fixed neighborhood
size (4% of object’s diagonal) for a single model
(Embrasure) decimated at different geometric detail
levels. For small resolutions (25K, 50K triangles) we
observe similar computation times between geomet-
ric and parametric space approaches, while the %AE
is high in comparison to higher detail versions of
the mesh. This is expected as the parametric method
uses the position samples as interpolated by the GPU
resulting in smoother and therefore slightly different
results than the CPU method. For larger resolutions,
we report an acceleration of 3× for the 100K model
to 137× for the 1000K model, with a steady AE.
Finally, for the original scanned object resolution of
1200K, we report a 181× faster computation with
a slight increase in the %AE. This is also expected
and attributed to the relative small buffer size for
the dense geometric detail. However, this can be
trivially addressed by increasing the geometry buffer
resolution to 2048x2048.
0
2
4
6
8
10
0K
200K 400K 600K 800K 1M 1.2M
Time in Seconds
Number of Triangles
Object Space
Parametric Space
0
0.4
0.8
1.2
1.6
2
% Absolute Error
%AE
Scalability over Geometric Density
Figure 9: Computations using the same metric and neigh-
borhood size (Left axis). Green line shows the %AE of the
parametric method (Right axis).
8x
15x
23x
30x
2% 4% 6% 8% 10% 12% 14% 16%
Computation Time
Size of Neighborhood (% object diagonal)
Scalability over Neighborhood Size
Object Space
Parametric Space
0x
0.00
0.80
1.60
2.40
3.20
% Absolute Error
%AE
Figure 10: Computations using the same metric and geo-
metric complexity (Left axis). Green line shows the %AE
of the parametric method (Right axis).
200
150
100
50
0
0
50 100 150 200 250 300 350 400
Time in Milliseconds
Number of Samples
Performance Control
512/512
1024/512
1024/1024
Figure 11: Average performance over several models us-
ing different number of samples, buffers size and size of
texture over which computations are performed. Legends
show Buffers Texture/Computations Texture Size in square
format.
1024/512
512/512
0.5
1.0
1.5
2.0
2.5
3.0
0 50 100 150 200
250
300
350
400
% Absolute Error
Number of Samples
Quality Control
1024/1024
Figure 12: Average quality over several models using differ-
ent number of samples, buffers size and size of texture over
which computations are performed. Legends show Buffers
Texture/Computations Texture Size in square format.
Neighborhood Size. In the measurements of Fig-
ure 10 we shift the focus from the geometric detail to
neighborhood size. Results are for the same model
(Embrasure) and metric (mean curvature) at 600K
resolution. We notice that for small neighborhoods
the %AE is higher. This deviation between the
parametric and geometric domain results are due
to the inadequate discrete representation of the
neighborhood in the geometric solution. While in the
parametric domain due to the interpolation of values
we mentioned earlier, an increasing neighborhood
AParametricSpaceApproachtotheComputationofMulti-scaleGeometricFeatures
13
size is directly reflected in a wider selection of
samples, the geometric neighborhood expands in
n-ring discrete steps, which is actually a deficiency.
For very large neighborhoods we notice also an
increase to the %AE, this time, due to the one jump
per sample approach of our implementation (see
end of Section 4.1), which starts missing samples.
Performance-wise, the parametric space method
scales very well and proves unaffected by the 8×
growth of neighborhood size. More specifically, the
computation time for the parametric domain feature
estimator grows by 2.25 times in contrast to the
26.45× factor reported by the geometric approach.
Performance and Quality Control. The number
of samples per pixel, buffer size and size of the
texture over which computations are performed, are
parameters that control the quality/performance of
our method. As we can see in Figure 11, increasing
the number of samples reduces the %AE and has
linear impact on the computation time, regardless
of the buffer resolution. The same effect have the
buffer size and the size of the texture over which
computations are performed (see Figure 12). Using
these parameters, performance and quality can be
controlled depending on the application requirements.
Memory Usage - Texture Size and Precision.
Four RGBA textures are used (see Section 3.3).
All the presented results so far were performed
using half-float precision textures. In order to
evaluate the performance/quality impact of full-float-
precision textures (FF), which double the memory
requirements, we performed experiments using both
resolutions (Table 2). FF buffers present an 8%
and 11% performance degradation on 512x512 and
1024x1024 buffers respectively, while the corre-
sponding improvement in AE is 4% and 6%. We can
conclude that the minor quality improvement does
not justify the performance drop and the doubled
memory requirements.
UV Parameterization. In order to evaluate how our
method is affected by the underlying parameterization
in terms of speed and quality, we performed several
tests. When operating on maps coming from global
surface parameterization (single chart) techniques, we
notice faster times, and increased error rates (see Fig-
ure 13) compared to multi-chart parameterizations
opting for minimal stretching. Single charts, mini-
mize branching operations but at the same time result
in greater distortion and less uniform sampling lead-
ing thus in loss of representation and measurement
accuracy.
Figure 13: Mean Curvature (Colorized) computed using
different parameterizations. Multiple charts result in in-
creased computation times, but smaller error, due to the
smaller distortion of the generated charts.
6 LIMITATIONS
Due to the fact that parameterization of the objects
surface is required, the method is limited to mesh ge-
ometries and it cannot be directly applied on point-
clouds.
7 CONCLUSION AND FUTURE
WORK
We presented a novel generic parametric-space ap-
proach for the computation of geometric features in
multiple scales. Decoupling of computational com-
plexity from the underlying geometry and the scale of
the features, leads to a fast, real-time method, suitable
for deformable/animated objects.
As future work we intent to evaluate the per-
formance of demanding applications, such as object
matching, object retrieval etc. using the parametric-
space computations.
ACKNOWLEDGEMENTS
This work was supported by EC FP7 STREP Project
PRESIOUS, grant no. 600533. Armadillo, Lucy,
Bunny and XYZ RGB Dragon models are from
Stanford 3D Scanning Repository. Angel model is
from the Large Geometric Models Archive of Geor-
gia Institute of Technology. Rim model is from
http://www.turbosquid.com. All other models used
are from the PRESIOUS project data collection.
GRAPP2015-InternationalConferenceonComputerGraphicsTheoryandApplications
14

REFERENCES
Bertrand, J., Diquet, C., and Puiseux, V. (1848).
D´emonstration d’un th´eor`eme de Gauss. Journal de
Math´ematiques, 13:80–90.
Campagna, S., Kobbelt, L., and Seidel, H.-P. (1998). Di-
rected edges—a scalable representation for tri-
angle meshes. J. Graph. Tools, 3(4):1–11.
Connolly, M. L. (1986). Measurement of protein surface
shape by solid angles. J. Mol. Graph., 4(1):3–6.
De Floriani, L. and Hui, A. (2005). Data structures for sim-
plicial complexes: An analysis and a comparison. In
Proc. of the Third Eurographics Symp. on Geometry
Processing, SGP ’05. Eurographics Association.
Floater, M. and Hormann, K. (2005). Surface parameteriza-
tion: a tutorial and survey. In Advances in Multireso-
lution for Geometric Modelling, Mathematics and Vi-
sualization, pages 157–186. Springer.
Griffin, W., Wang, Y., Berrios, D., and Olano, M. (2011).
GPU curvature estimation on deformable meshes. In
Symp. on Interactive 3D Graphics and Games, I3D
’11, pages 159–166. ACM.
Gu, X., Gortler, S. J., and Hoppe, H. (2002). Geometry
images. In Proc. of the 29th Annual Conference on
Computer Graphics and Interactive Techniques, SIG-
GRAPH ’02, pages 355–361. ACM.
Hormann, K., Polthier, K., and Sheffer, A. (2008). Mesh
parameterization: Theory and practice. In ACM SIG-
GRAPH ASIA 2008 Courses, SIGGRAPH Asia ’08,
pages 12:1–12:87. ACM.
Hua, J., Lai, Z., Dong, M., Gu, X., and Qin, H. (2008).
Geodesic distance-weighted shape vector image diffu-
sion. IEEE Trans. Vis. Comput. Graph., 14(6):1643–
1650.
Huang, Q.-X., Fl¨ory, S., Gelfand, N., Hofer, M., and
Pottmann, H. (2006). Reassembling fractured ob-
jects by geometric matching. ACM Trans. Graph.,
25(3):569–578.
Hulin, D. and Troyanov, M. (2003). Mean curvature and
asymptotic volume of small balls. The American
Mathematical Monthly, 110(10):947–950.
Kim, Y., Yu, J., Yu, X., and Lee, S. (2008). Line-art il-
lustration of dynamic and specular surfaces. In ACM
SIGGRAPH Asia 2008 Papers, SIGGRAPH Asia ’08,
pages 156:1–156:10. ACM.
Koenderink, J. J. and van Doorn, A. J. (1992). Surface
shape and curvature scales. Image Vision Comput.,
10(8):557–565.
Manay, S., Hong, B.-W., Yezzi, A., and Soatto, S. (2004).
Integral invariant signatures. In Computer Vision -
ECCV 2004, volume 3024 of Lecture Notes in Com-
puter Science, pages 87–99. Springer.
McGuire, M., Osman, B., Bukowski, M., and Hennessy, P.
(2011). The alchemy screen-space ambient obscu-
rance algorithm. In Proc. of the ACM SIGGRAPH
Symp. on High Performance Graphics, HPG ’11,
pages 25–32. ACM.
Mellado, N., Barla, P., Guennebaud, G., Reuter, P., and
Duquesne, G. (2013). Screen-space curvature for
production-quality rendering and compositing. In
ACM SIGGRAPH 2013 Talks, SIGGRAPH ’13, pages
42:1–42:1. ACM.
Meyer, M., Desbrun, M., Schrder, P., and Barr, A. (2003).
Discrete differential-geometry operators for triangu-
lated 2-manifolds. In Visualization and Mathemat-
ics III, Mathematics and Visualization, pages 35–57.
Springer.
Museth, K. (2013). Vdb: High-resolution sparse vol-
umes with dynamic topology. ACM Trans. Graph.,
32(3):27:1–27:22.
Novatnack, J. and Nishino, K. (2007). Scale-dependent 3D
geometric features. In Computer Vision, 2007. ICCV
2007. IEEE 11th International Conference on, pages
1–8. IEEE.
Pottmann, H., Wallner, J., Huang, Q.-X., and Yang, Y.-L.
(2009). Integral invariants for robust geometry pro-
cessing. Comput. Aided Geom. Des., 26(1):37–60.
Pottmann, H., Wallner, J., Yang, Y.-L., Lai, Y.-K., and Hu,
S.-M. (2007). Principal curvatures from the integral
invariant viewpoint. Computer Aided Geometric De-
sign, 24(8):428–442.
Rusinkiewicz, S. (2004). Estimating curvatures and their
derivatives on triangle meshes. In Proceedings of
the 3D Data Processing, Visualization, and Trans-
mission, 2Nd International Symposium, 3DPVT ’04,
pages 486–493. IEEE Computer Society.
Sander, P. V., Snyder, J., Gortler, S. J., and Hoppe, H.
(2001). Texture mapping progressive meshes. In Proc.
of the 28th Annual Conference on Computer Graphics
and Interactive Techniques, SIGGRAPH ’01, pages
409–416. ACM.
Sander, P. V., Wood, Z. J., Gortler, S. J., Snyder, J., and
Hoppe, H. (2003). Multi-chart geometry images.
In Proc. of the 2003 Eurographics/ACM SIGGRAPH
Symp. on Geometry Processing, SGP ’03, pages 146–
155. Eurographics Association.
Sheffer, A., Praun, E., and Rose, K. (2006). Mesh pa-
rameterization methods and their applications. Found.
Trends. Comput. Graph. Vis., 2(2):105–171.
Shirley, P. and Chiu, K. (1997). A low distortion map be-
tween disk and square. J. Graph. Tools, 2(3):45–52.
Taubin, G. (1995). Estimating the tensor of curvature of a
surface from a polyhedral approximation. In Proceed-
ings of the Fifth International Conference on Com-
puter Vision, ICCV ’95, pages 902–. IEEE Computer
Society.
Yang, Y.-L., Lai, Y.-K., Hu, S.-M., and Pottmann, H.
(2006). Robust principal curvatures on multiple
scales. In Symp. on Geometry Processing, pages 223–
226.
Yoshizawa, S., Belyaev, A., and Seidel, H.-P. (2004). A
fast and simple stretch-minimizing mesh parameteri-
zation. In Proc. of the Shape Modeling International
2004, SMI ’04, pages 200–208. IEEE Computer Soci-
ety.
Zhou, K., Synder, J., Guo, B., and Shum, H.-Y. (2004).
Iso-charts: Stretch-driven mesh parameterization us-
ing spectral analysis. In Proc. of the 2004 Eurograph-
ics/ACM SIGGRAPH Symp. on Geometry Processing,
SGP ’04, pages 45–54. ACM.
AParametricSpaceApproachtotheComputationofMulti-scaleGeometricFeatures
15
