
Crater Detection using CGC
A New Circle Detection Method
Vinciane Lacroix
1
and Sabine Vanhuysse
2
1
CISS Department, Royal Military Academy, Brussels, Belgium
2
IGEAT, Universit´e Libre de Bruxelles, Brussels, Belgium
Keywords:
Circle Detection, Crater Detection, Constrained Gradient, Feature Extraction.
Abstract:
”Constrained Gradient for Circle” (CGC) is a new circle detection algorithm based on the gradient of the
intensity image. The method relies on two conditions. The “gradient angle compatibility condition” constrains
the gradient of a given percentage of the pixels belonging to some digital circles having a radius in the range of
radii to detect to point towards the centre of the circle or in the opposite direction. The “curvature compatibility
condition” constrains the variation of the gradient angle of the same pixels in a range depending on the radius
of the circle. These two conditions are sufficient to detect the core of circular shapes. The best-fitting circle
is then identified. The method is applied to artificial and reference images and compared to state-of-the-art
methods. It is also applied to water-filled crater detection in Cambodia: these craters that might indicate
the presence of Unexploded Ordnance (UXO) dating from the US bombing produce dark circles on satellite
panchromatic images.
1 INTRODUCTION
The presence of Unexploded Ordnance (UXO) result-
ing from the US bombing during the late 1960s and
1970s is still preventing the use of the land in Cam-
bodia. When dropped, the bombs produced craters
that may still exist today. Many of them are filled
with water so that they appear as circular objects on
panchromatic satellite images. The purpose of this
study is to extract those craters as they might indicate
the presence of UXOs. Similar work was made by
Hatfield Consultants (Hatfield-Consultants, 2014) for
Laos. The authors used historic Corona satellite im-
ages; they computed differences between the original
image and its smoothed version, and used these dif-
ferences in an unsupervised K-means fuzzy classifier.
One class contained the impacted areas which were
then identified based on geometrical characteristics.
The geometry (i.e. the fact that craters are almost cir-
cles) is being used at the end of the process whereas
our approach is rather to start with geometry, i.e. dark
circle detection.
Circle detection has been a challenge since the
early days of Pattern Recognition and is still arous-
ing interest as recent publications show ((Chung et al.,
2012), (Akinlar and Topal, 2013), (Marco et al.,
2014)). Exhaustive review of circle detection meth-
ods can be found in the introduction of these arti-
cles. “Circle” may designate the border of a “sphere”,
“disc” or “ring”, or, a very thin ring, as shown on Fig-
ure 1. In this publication, we are interested in “disc”
detection, although the proposed method can be used
as such for sphere detection and for detecting inner
ring circumference. The method may be adapted for
the detection of the other types of circles but such an
adaptation is not described here.
(a) (b) (c) (d)
Figure 1: (a) Sphere; (b) disc; (c) ring; (d) thin ring.
H
ough transforms and their randomised ver-
sions are very popular (see for example (Xu et al.,
1990),(Yip et al., 1992)) but are still very time con-
suming as they rely only on the hypothesis of three
edgels belonging to a circle and they may require
complex structures for storing the votes. Some com-
putational time may however be saved using the gra-
dient orientation to constrain edgels belonging to the
same circle (see for example (Atherton and Kerbyson,
1999)) or using a LUT method ((Chung et al., 2009)).
320
Lacroix V. and Vanhuysse S..
Crater Detection using CGC - A New Circle Detection Method.
DOI: 10.5220/0005222503200327
In Proceedings of the International Conference on Pattern Recognition Applications and Methods (ICPRAM-2015), pages 320-327
ISBN: 978-989-758-076-5
Copyright
c
2015 SCITEPRESS (Science and Technology Publications, Lda.)

Most existing approaches use the fact that some
basic elements (pixels, edgels, or connected seg-
ments) are part of the circumference and combine
some of them to generate a centre-radius pair hypoth-
esis. To our knowledge, none of them uses a “blind”
centre-radius hypothesis as detecting circles of vari-
ous radii at each pixel seems time-consuming.
However, performing a first test on the gradient
angle on a few pre-defined digital circles of radius
spanning the radius range to detect allows to isolate
the core of shapes (circle, ellipses, squares, etc.) of
the corresponding size. This test requires the gradi-
ent angle of pixels located on the digital circles to be
similar to the angle of the line joining the pixel to
the circle centre. The second test consists in check-
ing if the gradient angle variation of pixels located
on the same circle are compatible with the one asso-
ciated with the considered circle. The second test en-
ables to keep circular shapes only. A counter is set at
each pixel considered as a potential centre and is in-
cremented if both tests are positive for the considered
digital circle. The percentage of compatible pixels is
stored and if the counter represents a significant part
of the digital circle, the centre is considered as a po-
tential candidate.
A second phase is however necessary to identify
the best centre/radius pair among the candidates. In
order to ease the second phase, in this publication, we
assume that the circles present in the image do not
overlap, and thus, if there is a circle at some pixel,
it is unique. This assumption is valid for the crater
detection application we are concerned with but might
not be true for other applications.
As the method is based on constrains on the gra-
dient, it is called ”CGC” meaning ”Constrained Gra-
dient for Circle”.
This paper is organized as follows. Section 2
presents the first phase aiming at extracting centres
candidates. In that section, the gradient angle and the
curvature compatibility conditions are presented. The
algorithm is then described and applied to an artificial
image. In Section 3, a second phase aimed at extract-
ing the best centre-candidate and the adequate circle
is proposed. In Section 4 the results of the full pro-
cess applied to three different images are presented
and compared to the ones of state-of-the-art methods.
Discussion and conclusions are provided in Section 5.
2 EXTRACTING CENTRES
CANDIDATES
In natural images or in scanned graphics, pure step
edges are not very probable; edges are rather span-
Intensity
Gradient Norm
Intensity
Gradient Norm
(c)
(d)
(b)
(a)
Figure 2: (a) Scanned graphic and (b) natural image with
some scaled gradient vectors overlayed and in (c-d) their
respective Intensity (in blue) and gradient norm profiles (in
red) at the centre line.
ning over a few pixels, which makes hills of gradient
norm even broader; in this study we use the Gaussian
gradient (Canny, 1986) with σ = 1. In the vicinity of
the border of a circle, the gradient orientation is near
the line passing through the centre, although the dis-
cretization process makes it dependent on the angle
and position (see Figure 2). Moreover, the variation
of the gradient angle in the direction perpendicular to
the gradient depends on the distance of the pixel to
the centre. These properties are exploited in the first
phase of the process.
2.1 Compatibility Conditions
2.1.1 Gradient Angle
In order to have a circle of radius r at centre c, all
gradient vectors located on the digital version of the
circle should point either towards c (bright circle)
or in the opposite direction (dark circle); because of
the discretization process, they will not point exactly
along this direction, but the angle difference should
be small (see the examples of Figure 2).
Let angles be expressed in fraction of radian (i.e.
unit= radian/π) so that the angle range is [−1 1]. Let
p be a pixel located on a digital circle C of radius r at
centre c, let γ be the gradient angle at p, and let α be
the angle of the line joining p to c. If there exists a cir-
cle of radius r at c, the gradient angle compatibility
condition at c is defined as: ∀p ∈ C,
Diff(α− γ) < ε
a
for dark circle
Diff(α− (1− γ)) < ε
a
for bright circle (1)
where Diff denotes angle difference.
This condition is necessary but not sufficient: it is
also true for “centres” of other shapes such as circles
of radius r
′
close to r (depending on the edge profile
CraterDetectionusingCGC-ANewCircleDetectionMethod
321

and on the extent of the filter in the gradient compu-
tation), for ellipses of axis close to r, and for shapes
fitting in circles of similar radius values. Moreover,
depending on the tolerance on the angle difference ε
a
,
the condition in (1) will not only hold for the centre
of the shape but also for its neighbourhood.
2.1.2 Gradient Angle Variation
If p is located on a digital circle, the local variation of
the angle of the gradient is also constrained. Let s and
t the two points located at a distance δ in the direction
perpendicular to the gradient at p. Let κ be defined
according to the Equation 2.
κ = Diff(γ
s
− γ
t
) (2)
where γ
s
and γ
t
denote the gradient angle at s and t.
κ is an approximation of the local curvature at p and
will abusively called “curvature” in the following. If
r is the radius of the circle, κ is such that
κ = 2∗ arcsin(δ/r) (3)
Some tolerance on the curvature should also be
allowed to deal with the discretization process. Thus
the curvature compatibility condition at c is de-
fined as: ∀p ∈ C,
2∗ arcsin(δ/r) − ε
k
< κ
p
< 2∗ arcsin(δ/r) + ε
k
κ
r
− ε
k
< κ
p
< κ
r
+ ε
k
(4)
where ε
k
designates the toleranceon the curvature and
κ
p
the curvature at p.
Figure 3 illustrates the two constraints for a pixel
p located at angle α on the circle C of radius r = 6.
r
κ/2
s t
p
γ
α
δ
c c
C
Figure 3: Constraint on gradient angle γ and on curvature κ
at p located on circle C of radius r; s and t are located at a
distance δ of p in the direction perpendicular to γ.
In the case of an imperfect or partial circle of ra-
dius r, only a fraction f of the gradient angles located
on C will satisfy condition (1) and (4). The number of
pixels n that should satisfy the angle and the curvature
compatibility condition, and b, the maximum number
of non-valid pixels are thus defined by
n = f # C and b = (1− f) # C (5)
where # denotes the cardinality.
If the circles to detect have a radius between rmin
and rmax, thanks to the smooth variation of the gradi-
ent direction in the direction perpendicular to the bor-
der (see Figure 2), not all correspondingdigital circles
need to be tested for angle and curvature compatibil-
ity. In this publication we use all integer values of r
between rmin and rmax by step of two.
There exist several implementations of digital cir-
cles (Blinn, 1996). In this study, the pixels of the dig-
ital circle C of radius r are found by starting at pixel
p(i, j) = (0,r), incrementing i by one, computing j
using the circle equation, and computing the angle us-
ing arcsin until 0.25 (π/8)) is reached; the other pix-
els are found using the circle symmetries (see some
resulting circles in Figure 4). The chosen implemen-
tation — also known as Bresenham’s circle algorithm
— is the one that has the smallest number of pixels
while preserving the connectivity.
Figure 4: Digital circles used in this study for a radius range
from 5 to 12 and a few vectors joining the centre to the
pixels lying on the circle of radius r = 9 ; each digital circle
is displayed in a different color.
2.2 Phase One: Algorithm Description
2.2.1 Prerequisite
1. Compute Gaussian gradient G
x
, G
y
and norm N.
2. Compute Angle of gradient A, and curvatureK ac-
cording to Equation 2.
2.2.2 Centre Candidates
Let ε
a
, ε
k
, f and t be the tolerance on gradient angle,
the tolerance on curvature, the fraction of circle to de-
tect and the threshold value under which the norm of
gradient is considered as noise respectively.
1. Let C = {C
0
,..,C
j
,...C
n
} be the list of digital
circles located at the origin, corresponding to the
increasing radii r
0
,...r
j
,..r
n
with rmin = r
0
and
r
n
≤ rmax. For each C
i
, get the list of vectors p
ij
joining the centre to each pixel located on the dig-
ital circle (i.e. using Bresenham’s algorithm) and
their angle a
ij
; compute z
i
= # C
i
, b
i
and n
i
ac-
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
322

cording to Equation 5 and the ideal curva-
ture κ
i
according to Equation 3.
2. Initialize two rasters R andV for storing the radius
and the fraction of valid pixels.
3. Scan the image; for each pixel c, compute the
fraction of valid pixels lying on the digital circles
{C
0
,..,C
j
,...C
n
} starting with the smallest circle
C
0
, as follows. For each vector p
ij
of C
i
, get the
pixel q
ij
= c + p
ij
, lying on circle C
i
centred at c
and test three conditions:
• the minimum norm condition: N
q
ij
> t;
• the angle difference compatibility condition ac-
cording to Equation 1, where α = a
ij
(angle of
p
ij
) and γ = A
q
ij
(gradient angle at q
ij
);
• the curvaturecompatibility condition according
to Equation 4 where κ is the curvature at q
ij
and
κ
r
= κ
i
.
If all conditions are satisfied, increment the
“good” counter at c (count separately dark and
bright circle according to the gradient angle at
q
ij
), otherwise increment the “bad counter”. As
soon as the bad counter has reached b
i
, the next
circle C
i+1
is tested. Otherwise, test the full circle
C
i
, save r (radius) and v (fraction of valid pixel) in
R and V respectively. For convenience purpose, a
negative value in V indicates a dark circle. Store
c in a list of potential centre candidates.
2.2.3 Shapes’ Core
Get the connected components of all centre candi-
dates. In the case of non-overlapping circles, each
connected component will be the core of a circular
shape. For each connected components, compute c
a
,
the centre of gravity of the pixels with the lowest ra-
dius r (it should be a centre candidate, but if it is not,
consider the 8-neighbours of similar radius with the
highest counter). c
a
−r is a first centre-radius approx-
imation of the shape.
2.3 Application
The parameters of the proposed method are:
• σ = 1 and δ = 2 for the prerequisite Gaussian gra-
dient and curvature computation,
• t = 10 for ignoring pixels with a too low gradient
norm,
• ε
a
, ε
k
, for setting the tolerance on gradient angle
and curvature; expressed in fraction of radian (i.e.
unit= radian/π), a reasonable range is [0.06 0.14].
For simplicity ε
a
= ε
k
.
• f, for the minimal fraction of circle to detect. A
reasonable range is [0.7 1];
The fraction of detected circle v at some potential cen-
tre depends on ε
a
/ε
k
: if the tolerance rises, the portion
of detected circle will stay equal or become larger.
The parameters f and ε
a
/ε
k
are thus not independent.
Experiments on geometric figures on a uniform
backgroundprovide some insight on the method (used
with rmin = 5 and rmax = 15) and enable to analyse
the effect of the parameters ε
a
, ε
k
, and f on the pro-
duction of candidates. The shapes are identified by
numbers on Figure 5 (top). The raster V displaying v,
the fraction of the smallest valid circle at each centre
candidate, has been analysed for values of ε = ε
a
= ε
k
,
ranging from 0.06 to 0.14, and f = 0.6. Although
0.6 is below the recommended value, it enables to
see when false alarms occur for low f values. An
example of such a raster is shown on Figure 5 (bot-
tom) for ε
a
= ε
k
= 0.12 and f = 0.6. Connected sets
of non-zero v values correspond to the core of each
shape, except for the ellipse (26) which generates two
connected sets when ε = 0.14. The minimum and
maximum values of v in the core of each shape are
shown in Table1. None of the triangle generates a
connected component; they are thus ignored in the ta-
ble; they are nevertheless important in the experiment
as their proximity to near-circular shapes is disturb-
ing their detection by perturbing the gradient direction
(see shapes 9–10, 13–14, 23–24).
Table 1: Percentage range of compatible pixels for the core
of each shape identified in Figure 5.
ε → 0.06 0.08 0.10 0.12 0.14
Type ↓ Id ↓
Circle 14 60-100 60-100
15 60-100 63-100 77-100 60-100 60-100
Circular 10 65-95 60-100 61-100 60-100
Ellipse 11 60-98 60-100 60-100 60-100 60-100
18 60-85 61-95 63-100 63-100 60-100
23 60-70 60-85 60-96 60-100 60-100
Elipse 1 61-85 60-69 60-88 60-95 60-100
4 90 71-85 60-92 60-92
12 60-70 60-90 60-95 60-95 60 -100
26 60
60
Square 2 61
3 66 60-84
5 60 60-63
6 60-67
7 61-71
17 60 60-63
19 61
21 65-84
29 61-63
The image contains two perfect circles (14, 15),
four almost circular ellipses (10, 11, 18, 23), other el-
lipses (1, 4, 12, 26) and squares (2, 3, 5, 6, 7, 17, 19,
21, 29). The analysis of the table suggests using the
method with ε ≃ 0.12, as for any value of f > 66, all
circles and almost circular ellipses will be detected,
and so will be the ellipses (1, 4, 12). A higher value
of ε might generate false alarms among squares, al-
CraterDetectionusingCGC-ANewCircleDetectionMethod
323

though setting ε
k
< ε
a
might resolve them. A smaller
value of ε might be inadequate to deal with practical
problems more subject to noise.
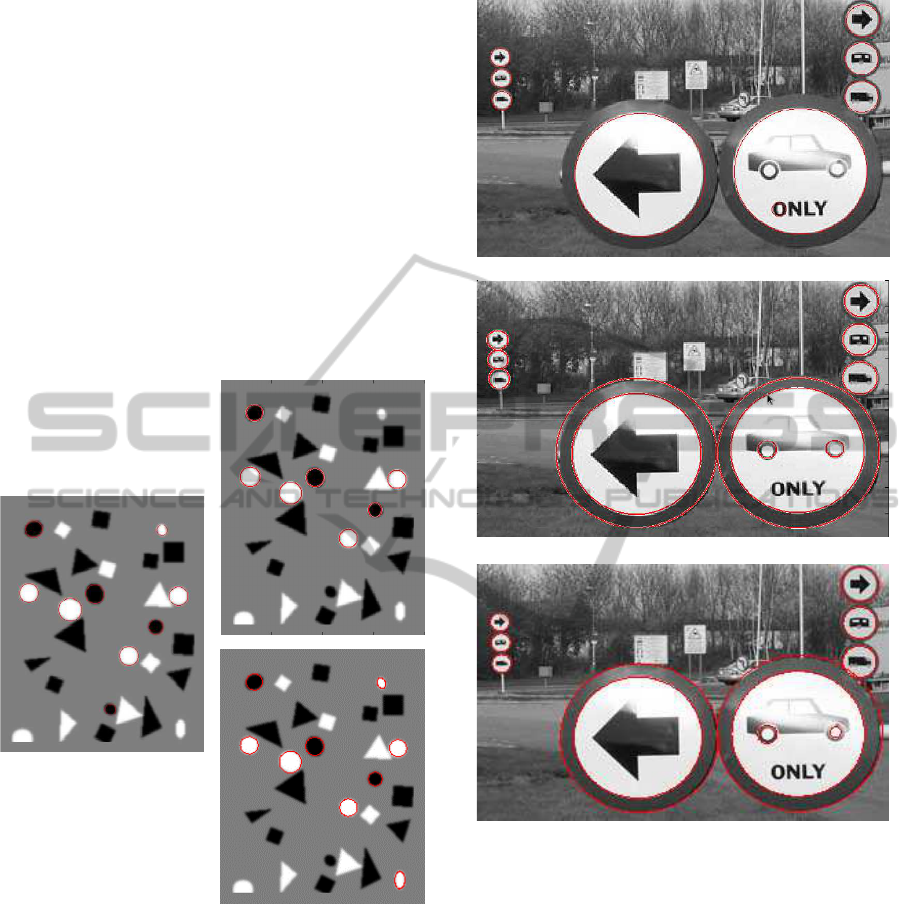
The same image has been processed using the
isophote (Marco et al., 2014) and the EDCircles
(Akinlar and Topal, 2013) method (see Figure6). The
sets of detected shapes are slightly different:
• CGC: (ε = 0.12, f > 66): {14, 15, 10, 11, 18, 23,
1, 4, 12};
• Isophote:{14, 15, 10, 11, 18, 1, 12};
• EDCircles: {14, 15, 10, 11, 18, 1, 4, 12, 26};
All methods detect the perfect circles (14,15);
Isophote and EDCircles are missing the near circu-
lar ellipse 23 probably because of the proximity of
shape 24. Some ellipses are detected by all methods;
Isophote rejects the most elongated ones. None of the
methods generate false alarms.
2
5
6
12
13 14
23
27
9
8
20
15
17
22
19
18
11
7
4
3
1
10
21
28
24
25
26
29
16
Figure 5: (Top) Test image made of random geometrical
dark and bright shapes; (bottom) Example of RasterV (ε
a
=
ε
k
= 0.12 and f = 0.6); white= 100% detection for bright
circle, grey=0% , black= 100% detection for dark circle.
3 BEST CENTRE-CIRCLE
CANDIDATES
The first phase enables to detect the core of each cir-
cular shape; the second phase aims at finding the best
centre-radius pair. A first centre approximation (c
a
)
is obtained selecting the centre of gravity of pixels of
the lowest radius value inside the connected compo-
nent. The exact centre should be in the vicinity of this
point, and provided that there is a unique circle near
c
a
(working hypothesis), the exact radius should be in
the range of [r r+ 2].
One could use any existing circle detection
method in the neighbourhood of c
a
, or use active con-
tours with the circle of radius rmin as initial contour
or consider the estimation of the parameter of the po-
tential circles in these areas as a least square estima-
tion problem such as in (Zelniker, 2006).
The problem thus becomes an optimization prob-
lem: find the best circle given a centre and find the
best centre within the set associated with the same la-
bel. The best optimization function will depend on the
application: e.g., is a partial circle that fits the border
of the shape perfectly a better output than a complete
circle lying farther away from this border? Different
choices will lead to different optimization functions.
Nevertheless, three factors are important in the
process: the gradient angle and curvature compatibil-
ity as already identified in the first phase, and also the
location of the shape border that depends on the gra-
dient norm, the latter being maximum at edgels.
The current implementation of the second phase is
described as follows. For each shape label, each digi-
tal circle of radius in the range of r to r + 2 at centre
c
a
(identified by phase one) is tested as the potential
circle. For each of these circles, pixels satisfying the
three compatibility conditions (norm, angle and cur-
vature) are considered: the projection of the gradient
along the line joining the pixel to the centre is com-
puted and the average n
a
is performed on the circle.
The fraction of valid pixel v is computed. The circle
with the highest value of n
a
∗ v is considered as the
best fit. The second phase is thus very similar to the
the first one, excepted that:
• more precise circles are used (r incremented by
one),
• only centre of gravity of shapes are tested
• an additional computation involving the gradient
is performed at each pixel
An integer value is thus obtained for the centre and
for the radius.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
324
4 RESULTS
The full detection method has been applied to an ar-
tificial image, to a reference image and to a satellite
image; the results are comparedto the results obtained
by the using the isophote (Marco et al., 2014) and the
EDCircles (Akinlar and Topal, 2013) method.
4.1 Application to an Artificial Image
The results of phase one on the image displayed in
Figure 5 has already been described and discussed in
Section 2.3. The method is used with σ = 1 and δ = 2
for the norm and curvature computation, ε
a
= ε
k
=
0.12, t = 10, f = 0.80, rmin = 5, rmax = 15. The
best-fitting circles are shown on Figure 6.
Figure 6: Detected circles superimposed on Test im-
age made of random geometrical dark and bright shapes
(200×250); left: CGC; top right: isophote; bottom right:
EDCircle.
4.2 Application to a Reference Image
The CGC method with the same parameter values (ex-
cept for rmax set to 50) has been used to detect circu-
lar shapes on the image shown in Figure 7 available
at
http://ceng.anadolu.edu.tr/cv/EDCircles/
where the result of the EDCircle method is also com-
pared to other methods.
Note that the wheels of the car on the right big sign
Figure 7: Detected circles superimposed on Sign Image
(300×198); (top) CGC (middle) Isophote; (bottom) EDCir-
cle.
are detected by the Isophote and EDCircle methods.
The white discs inside the wheels are too small for
the CGC (although it is recommended to use the CGC
with rmin >= 5, if rmin is set to 4, the disc of the left
wheel is detected). The outside circles of the two big
signs are missed by the CGC, as a single circle is as-
sumed at a given location. Only the CGC is detecting
the ”O” of ”only”; even the EDCircle is missing it al-
though it detected shape 26 of Figure 5. Thus, with
respect to sign detection the CGC performs as well as
the best state-of-the-art methods.
4.3 Application to a Satellite Image
The study area is located in the eastern part of
CraterDetectionusingCGC-ANewCircleDetectionMethod
325
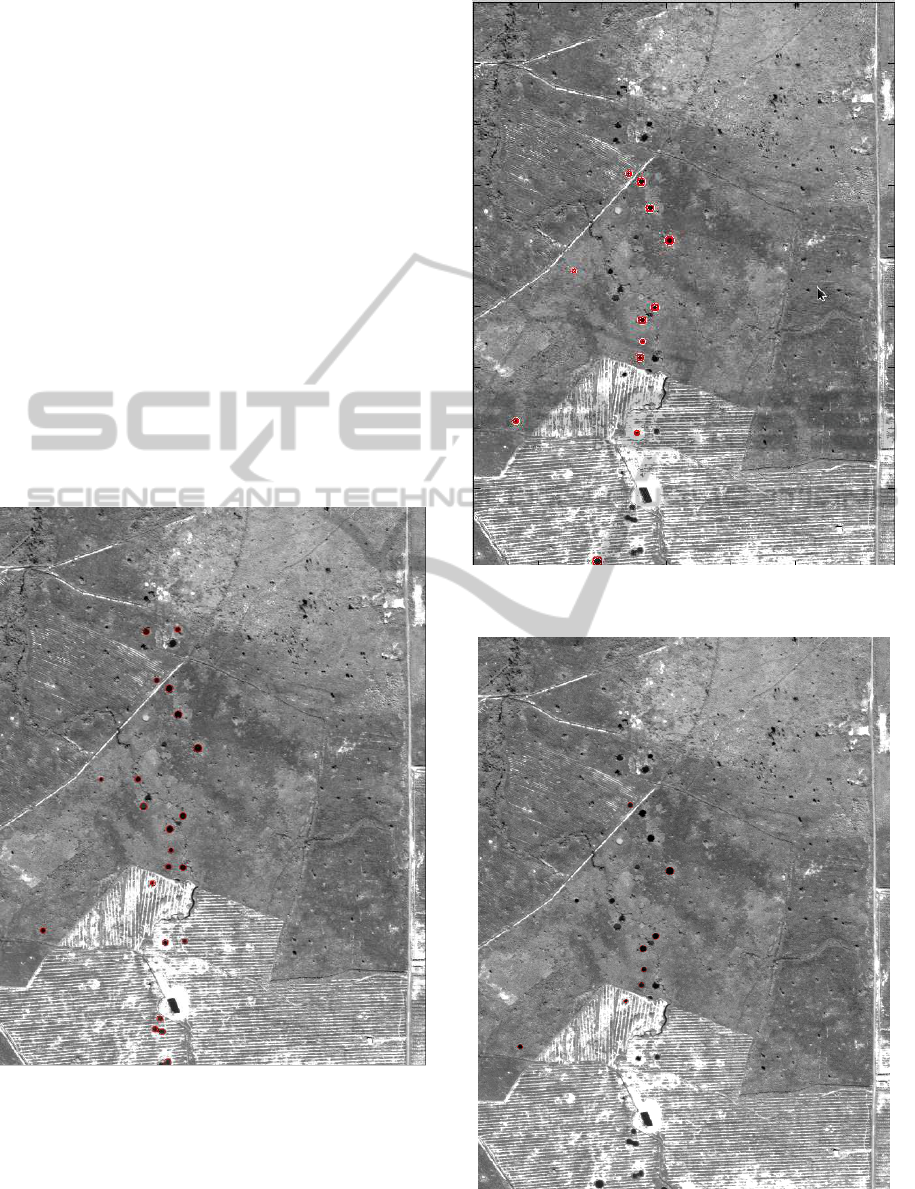
Cambodia near the border with Vietnam, in a rural
zone (Choam Kravien) that was heavily bombed dur-
ing the Vietnam War. The terrain is quite flat and
the landscape consists mainly of agricultural land.
The panchromatic image used was acquired by the
WorldView-2 instrument on 26 November 2011. It
covers 100 km
2
, with a spatial resolution of 0.5 meter
and a pixel depth at acquisition of 11 bits. The method
is used with σ = 1 and δ = 2 for the norm and curva-
ture computation, ε
a
= ε
k
= 0.12, t = 10, f = 0.80,
rmin = 5, rmax = 15; only dark circles are detected
and an additional threshold on the circle average norm
n
a
is set at t = 50.
The results using our method, isophote and ED-
Circles are respectively shown in Figure 8, 9 and 10.
The comparison of the results shows that many
circle shapes are missed by the EDcircle; many are
detected by the isophote method but the CGC method
provide better results. A comparison with visual in-
spection should still be performed to have a quanti-
tative view of the performance of the method in this
context.
Figure 8: Detected circles (CGC) superimposed on
1309×1855 part of the panchromatic image.
Figure 9: Detected circles (Isophote method) superimposed
on 1309×1855 part of the panchromatic image.
Figure 10: Detected circles (EDCircle method) superim-
posed on 1309×1855 part of the panchromatic image.
ICPRAM2015-InternationalConferenceonPatternRecognitionApplicationsandMethods
326

5 DISCUSSION AND
CONCLUSIONS
The Constrained Gradient for Circle (CGC), a
new two-phase method for extracting circles seems
promising. The originality of the method resides in
the first phase that uses a gradient angle and curva-
ture compatibility constraint at pixels lying on vari-
ous digital circles to produce sets of connected pixels
belonging to potential circle candidates. The second
phase consists in finding the best pair of circle-centre
that optimizes the circle position. The method has
been been compared to state-of-the-art methods ap-
plied to an artificial image, a reference image and a
panchromatic satellite image of Cambodia for crater
detection. The results seem promising. The process
could be performed in parallel, not only at each pixel,
but also for each of the digital circles, which makes
the method efficient. Although the method in the cur-
rent form can deal with any radius range and various
portions of circle, it is better suited to the detection of
full disconnected circles whose radius is small com-
pared to the image size. It could be generalized in or-
der to extract overlapping circles, rings and thin rings
by developing another second phase (thin ring detec-
tion would require a further line detection step as pre-
requisite) and also to detect squares, by adapting the
curvature compatibility constraint.
ACKNOWLEDGEMENTS
Special thanks to Dr. De Marco who processed our
data with his method, and to Dr. Akinlar and Dr.
Topal for their site at
http://ceng.anadolu.edu.tr/cv/EDCircles/except
which allows to process any data with their method.
This research is funded by tthe EC FP7 Security
TIRAMISU Project GA 284747.
REFERENCES
Akinlar, C. and Topal, C. (2013). Edcircles: A real-time
circle detector with a false detection control. Pattern
Recognition, 46.
Atherton, T. J. and Kerbyson, D. J. (1999). Size invari-
ant circle detection. Image and Vision Computing,
17:795803.
Blinn, J. (1996). Jim Blinn’s Corner: A Trip Down
the Graphics Pipeline. Morgan Kaufmann series in
computer graphics and geometric modeling. Morgan
Kaufmann Publishers.
Canny, J. (1986). A computational approach to edge de-
tection. IEEE Trans. on Pattern Anal. and Machine
Intelligence, pages 679–697.
Chung, K.-L., Chen, P.-Z., and Pan, Y.-L. (2009). Speed up
of the edge-based inverse halftoning algorithm using
a finite state machine model approach. Computers &
Mathematics with Applications, 58(3):484 – 497.
Chung, K.-L., Huang, Y.-H., Shen, S.-M., Krylov, A. S.,
Yurin, D. V., and Semeikina, E. V. (2012). Efficient
sampling strategy and refinement strategy for random-
ized circle detection. Pattern Recognition, pages 252–
263.
Hatfield-Consultants (2014). Uxo predictive modeling in
mmg lxml sepon mine development area. Technical
Report 1791.D6.1, Hatfield consultants, East Lansing,
Michigan.
Marco, T. D., Cazzato, D., Leo, M., and Distante, C. (2014).
Randomized circle detection with isophotes curvature
analysis. Pattern Recognition.
Xu, L., Oja, E., and Kultanen, P. (1990). A new curve de-
tection method: Randomized hough transform (rht).
Pattern Recognition Letters, 11:331338.
Yip, R. K., Tam, P. K., and Leung, D. N. (1992). Modifica-
tion of hough transform for circles and ellipses detec-
tion using a 2-dimensional array. Pattern Recognition,
25:10071022.
Zelniker, E. E. (2006). Maximum-likelihood estimation of
circle parameters via convolution. IEEE Transaction
on Image Processing, 16:865–876.
CraterDetectionusingCGC-ANewCircleDetectionMethod
327
