
Model Identification for Photovoltaic Panels Using Neural Networks
Antonino Laudani, Gabriele Maria Lozito, Martina Radicioni, Francesco Riganti Fulginei
and Alessandro Salvini
Department of Engineering, Roma Tre University, Via Vito Volterra 62/b, Rome, Italy
Keywords:
Neural Networks, Fully Connected Cascade, Photovoltaic Panels, One-Diode Model.
Abstract:
The present work documents the study on the usage of Neural Networks to compute the parameters used in
solar panel modelling. The approach followed starts from a dataset obtained by a process of model identifi-
cation via numerical solution of nonlinear equations. After a preliminary analysis pointing out the intrinsic
difficulty in the classic identification of the parameters via NN, by taking advantage of closed form relations, a
hybrid neural system, composed by neural network based identifiers and explicit equations, was implemented.
The generalization capabilities of the neural identifier were investigated, showing the effectiveness of this
approach.
1 INTRODUCTION
The solar energy power industry requires the use of
suitable photovoltaic (PV) model for the evaluation
of the performance of power plants. Among the
available models for electrical representation of a PV
panel, the five-parameter one, also known as ”‘one-
diode model”’, is the widest adopted and is gener-
ally recognized as reference design tool (Blair et al.,
2010). This model describes the electrical relation be-
tween current and voltage for a PV module (or an ar-
ray of modules), and may be identified either by em-
ploying few experimental data, or by solving a system
of five non-linear equations, starting from data pro-
vided by manufacturers in datasheets. In both cases,
the identification problem is really a complicated task,
which must be resolved numerically by means of op-
timization/inverse problems solving techniques. In-
deed, two main issues characterize the model and
must be addressed: the transcendental nature of the
equations, which leads to the impossibility to solve
the problem analytically, and the lack of sufficient
informations to take effective initial guess values to
be used in the selected optimization/inverse problem
technique. For these reasons, almost any possible
optimization technique has been adopted in litera-
ture: simulated annealing (El-Naggar et al., 2012),
genetic algorithm (Zagrouba et al., 2010), differen-
tial evolution (Ishaque and Salam, 2011; Jiang et al.,
2013), evolutionary algorithm (Siddiqui and Abido,
2013), artificial bee swarm optimization (Askarzadeh
and Rezazadeh, 2013), bacterial foraging algorithm
(Rajasekar et al., 2013), semi-analytical/deterministic
approach and so on. All these techniques, although
effective, make the constrained optimization problem
with five unknowns rather long and complex to solve
without strong computational capabilities. This short-
coming of the model was addressed in (Laudani et al.,
2013), where the authors deduced that the model
could be reduced, by following algebraic manipula-
tion, to a two only independent parameters model, be-
ing three of the original parameters dependent on the
other two. The resulting model must be still identified
by numerical means, but now using much less com-
plex methods (deterministic algorithms) such as New-
ton method or steepest descent gradient. In fact, it
has been observed that the two-parameter problem is
usually convex, also in the case of experimental data
(Laudani et al., 2014a). However, regardless of the
used model, the PV parameter identification requires
a complex software architecture. The five-parameter
model needs a high exploration algorithm to isolate
candidate solutions, that are later refined by a local
search algorithm, to discern local minima from global
optimum. The two-parameter reduced form model,
even if convex, still requires a local non-linear opti-
mization algorithm to be efficiently identified (Lau-
dani et al., 2014b): this is a serious drawback, which
does not allow an easy implementation of a generic
solver for the problem outside a suitable computing
environment, such as Matlab. This is a serious limi-
tation, since it does not allow the integration of these
130
Laudani A., Lozito G., Radicioni M., Riganti Fulginei F. and Salvini A..
Model Identification for Photovoltaic Panels Using Neural Networks.
DOI: 10.5220/0005039201300137
In Proceedings of the International Conference on Neural Computation Theory and Applications (NCTA-2014), pages 130-137
ISBN: 978-989-758-054-3
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
identification algorithms in low cost embedded sys-
tem, based on microncontroller architecture, for the
monitoring and the management of PV plants (Car-
rasco et al., 2013). On the other hand, although many
artificial intelligence methods have been used for this
problem, the Neural Networks (NNs) were used only
to interpolate experimental data, rather than extract
the five parameter model. In the PV field, NNs are
frequently used for MPPT (Maximum Power Point
Tracking) algorithms (Liu et al., 2013), solar irra-
diance (Mancilla-David et al., 2014) estimation and
forecasting (a review on the subject was published by
(Yadav and Chandel, 2014)). Nevertheless, at the au-
thors knowledge, in literature the neural approach did
not lead to effective results in the PV five parame-
ter model extraction yet. This probably is due to a
twofold problem: i) the need of a meaningful dataset
for the training of the NN (thanks to which the NN
should be able to learn how to solve the respective
non-linear system of equations) which involves solv-
ing the inverse problem for a high number of differ-
ent panels; ii) the difficulties in the identification of
one of the parameters (R
SH
), which makes ineffective
the neural approach. On the other hand, Neural Net-
works (NN) are often used in literature to solve effi-
ciently mathematical problems (Capizzi et al., 2004;
Xu et al., 2012) involving solution of complex math-
ematical expression. This paper is aimed at showing
the results obtained by the developed neural network
in the solution of the identification problem for the
five parameter model starting from datasheet informa-
tion, thanks to the synergy between neural approach
and reduced forms.
2 THE FIVE-PARAMETER
MODEL AND ITS REDUCTION
TO TWO PARAMETERS
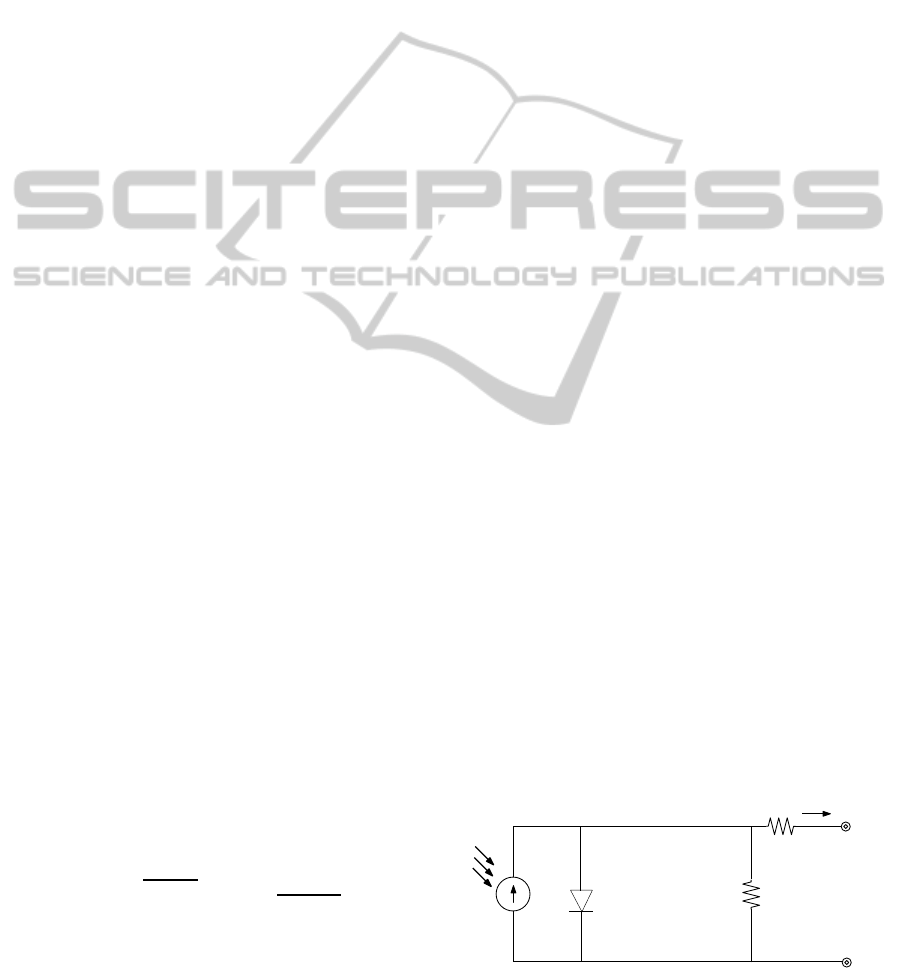
The five parameter model is based on the circuit rep-
resentation of a PV module by the means of an in-
dependent current source, an anti-parallel diode and
two output resistances, one in parallel with the diode
and one in series with the output branch (see fig. 1).
The current-voltage relation expressed by the model
is shown in 1.
I = I
Irr
− I
0
"
e
q
(
V+IR
S
)
N
S
nkT
− 1
#
−
V + IR
S
R
SH
(1)
This equation can represent a PV module composed
by an arbitrary number N
S
of cells in series. The pa-
rameters of equation (1) are the ideality factor n, the
shunt resistance R
SH
, the series resistance R
S
, the sat-
uration reversal current of the diode I
0
and the irra-
diation current I
Irr
. The other physical quantities in-
volved are: the electron charge q (q = 1.602× 10
−19
C); the Boltzmann constant k (k = 1.3806503×10
−23
J/K); the cell temperature T. Apart from the ideality
factor n and the series resistance R
S
, the three other
parameters are temperature and/or irradiance depen-
dent. Among the different version of the five param-
eter models, which describe these dependences, the
one proposed and validated in (Desoto et al., 2006)
is one of the most successfully adopted, and, for this
reason, is the one used in this work. Unfortunately,
manufacturers of PV panel do not report these five pa-
rameters on the datasheet, so they must be derived by
actual available data: the open circuit voltageV
OC
, the
short circuit current I
SC
, the voltage and current at the
maximum power point I
MPP
and V
MPP
, and the tem-
perature coefficient of both I
SC
and V
OC
, respectively
α
T
and β
T
at Standard Reference Conditions (SRC),
that is in correspondence of a solar irradiance S
REF
of 1000 W/m
2
and a temperature T
REF
of 25
◦
C. By
using these data, five implicit non-linear equations in
the unknowns of n, R
SH
, R
S
, I
0
, and I
Irr
can be formu-
lated in order to achieve the values of the five param-
eters at SRC: the first equation is achieved by writ-
ing the (1) at open circuit condition; the second equa-
tion by imposing short circuit condition; the third and
forth equation by using maximum power point condi-
tion; the last equation by exploiting the condition on
open circuit at not SRC condition. The solution of this
system of trascendental equations by numerical tech-
niques gives the parameters of the model (Laudani
et al., 2014b). A schematization of this identification
problem approach is illustrated in Fig. 2. From this
figure it is also to worth noticing that in order to avoid
passing the number of cells in series, N
S
, as input,
the product a = N
S
n was used as output, thus reduc-
ing the input parameters. Then, once the parameters
are extrapolated at SRC, they can be modulated by the
means of simple relations to obtain an I−V character-
istic for any condition of temperature and irradiance.
This identification process, although being complete
and effective, is far from being computationally effi-
cient: and this essentially because of the trascendental
I
irr
R
S
R
SH
+
−
I
V
G
Figure 1: Circuit representation of a PV module by means
of the five-parameter model .
ModelIdentificationforPhotovoltaicPanelsUsingNeuralNetworks
131

Figure 2: Identification of the five-parameter model by
means of numerical solution of implicit equations system.
nature of the involved equations. Recently, it has been
observed (Laudani et al., 2013) that the five implicit
equations used in the five-parameter model identifi-
cation can be manipulated algebraically to reduce the
number of unknowns. In particular, the unknowns of
I
Irr
, I
0
and R
SH
can be expressed as a function of the
unknown n = a/N
S
and R
S
by means of closed forms
expressions, like:
R
SH
= h(n,R
S
) (2)
I
0
= f(n,R
S
) (3)
I
irr
= g(n,R
S
) (4)
where the function f(n,R
S
), g(n,R
S
) and h(n,R
S
) are
respectivelygiven by the formulae reported in the Ap-
pendix together with a table summarizing the nomen-
clature. This reduction has two benefits. First, the
problem of model identification is reduced to the ex-
traction of only two unknown parameters (n and R
S
),
allowing simpler optimization techniques to be used.
Second, differently from the five-parameter problem,
this is generally a convexunimodal problem. Another
important advantage of the two-parameter model lies
in the search domain. Consider the five-parameter
model: while a lower bound for the five parameters
is apparent (i.e. they must be positive to be physically
sensible) the upper bound is undefined. An exception
can be made for the n parameter, defined by solid-
state physics lower than 2 (although often amorphous
silicon modules have higher ideality factor), accord-
ing to the transport mechanism for charges inside the
junction. The remaining four parameters, however,
must be searched in the positive semi-space of solu-
tions. By using the reduced closed forms model, the
R
S
unknown is related to I
Irr
, I
0
and R
SH
by means of
the above cited implicit equations. By imposing the
non-negativity of I
Irr
, I
0
and R
SH
, it is possible to for-
mulate an upper bound for R
S
itself. Thus the result-
ing equations with the relative constraints constitutes
an optimization problem easier to address and solve
than the original one inherent in the five-parameter
Figure 3: Mean error on training and validation for MLP
estimating R
SH
parameter ( hidden layer size up to 20 neu-
rons).
model identification (Laudani et al., 2014a; Laudani
et al., 2014b). Nevertheless, the system of the reduced
model still cannot be solved easily outside a suitable
computing environment, such as Matlab, Mathcad,
etc. This drawback has not allowed the development
of suitable management software of PV plants in low
cost computational system (such as microncontroller
based architecture), which is of interest for the pho-
tovoltaic system industry. On the other hand, it al-
lowed the identification of thousands of modules from
database in few minutes giving the possibility to con-
stitute a valid dataset for the training of a NN able to
deal with this kind of problem.
3 SET-UP OF THE PV MODEL
NEURAL IDENTIFIER
Different possibilities arises when choosing for a NN
architecture. Firstly, the nature of the problem must
be examined: static or dynamic problems influence
our choice in the direction of feed forward or recur-
rent networks. In this case, the problem is a static
identification problem which can be solved by a feed
forward approach. Another point to take into ac-
count is the complexity of the implementation in low
cost/performance system. Starting from these consid-
erations the Multi-Layer-Perceptron (MLP) architec-
ture is surely the clear choice for this kind of prob-
lems. In the MLP architecture the neurons are orga-
nized in subsequent layers, and the connections are
made using a feed forward configuration: no connec-
tion exists between neurons of the same layer, but
each neuron communicates via weighted connections
to all the neurons of the successive layer. The num-
ber of layers in a MLP is variable, with a minimum of
three. In this case, the Input layer performs no opera-
tions. The Hidden layer is composed by neurons with
a non-linear activation function. The Output layer is
analogous to the second, but with a simple linear acti-
vation function. Indeed, the hidden layer re-maps the
inputs so that they are linearly separable, and the out-
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
132
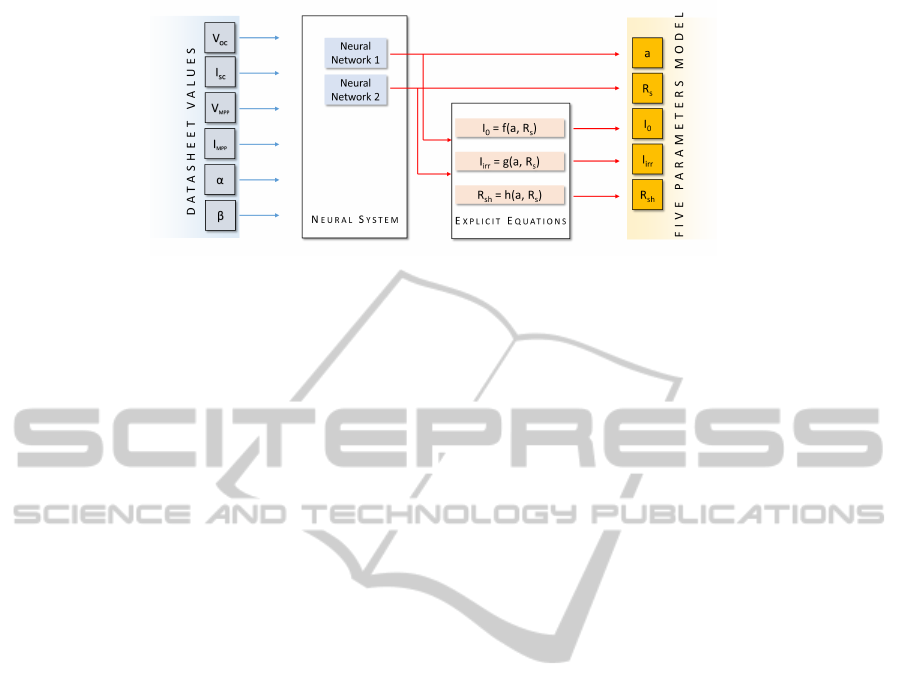
Figure 4: Identification of the parameters by means of a neural system and explicit equations.
put layer performs linear combination. By the Univer-
sal Approximation Theorem (Cybenko, 1989; Hornik
et al., 1989) a feed forward neural network with a sin-
gle hidden layer containing a finite number of neu-
rons can interpolate any continuous function. In ad-
dition, the single hidden layer MLP is a standard ar-
chitecture, where the only parameter is the number of
neurons in the hidden layer. The advantage of this
architecture lies in its univocal determination by the
number of neurons: given the hidden layer size, the
number of inputs and the number of outputs, the NN
architecture is completely defined. Another impor-
tant issue is that the relation between training per-
formance and layer size has been investigated thor-
oughly in literature (Ilonen et al., 2003; Rawat et al.,
2013; Hunter et al., 2012; Teoh et al., 2006; Kim
and Lee, 2008). However, complex problems may
require a very high number of neurons, making the
training of a single hidden layer MLP difficult: that
is, even if the MLP could approximate any function,
it may not be the most efficient way to do it (Wil-
amowski, 2009). On this behalf, different architec-
tures arose in literature. Nevertheless, it usually is
the first typology of NN to try when a new problem
is addressed for the first time. For the implementa-
tion of the neural identifier of the PV five parameter
model we have investigated the use of MLP architec-
tures, since we have already successfully used it for
other PV related problems: in particular for the so-
lution of maximum power point identification (Car-
rasco et al., 2013) and for the prediction of solar ir-
radiance from PV voltage and current measurements
(Mancilla-David et al., 2014). The approach pursued
in this paper is to use a neural network to estimate
the parameters of the one diode model starting from
datasheet value, as explained in section 2. The sim-
plest strategy would be to substitute the block shown
in figure 2 with a MLP composed by multiple inputs
and outputs, train it on the training set and validate the
results obtained. It has been observed, however, that
by using a MIMO architecture, an effective estimation
with NN cannot be achieved for the addressed prob-
lem. To understand the reasons behind this behavior,
the MIMO was split in multiple MISO networks (Par-
odi et al., 2012), one for each of the five parameters
figuring in the model. By trying to compute the pa-
rameters individually, the problem became apparent:
the parameter R
SH
could not be estimated by the NN,
at least by using a low/medium number of neurons,
and consequently neither by the MIMO network (the
performance of the MISO network up to 20 neurons
can be seen in figure 3). This parameter, by itself,
was the cause of the NN approach failure. This jus-
tifies as well the lack of PV model neural identifiers.
By taking advantage of the closed forms proposed in
Section 2, the calculation of parameters I
0
, R
SH
and
I
Irr
is not necessary to identify the model. Indeed,
as can be seen in figure 4, the NN approach can be
used to evaluate the two independent parameters R
S
and a, while the remaining three can be calculated by
using the closed forms f(n,R
S
), g(n,R
S
) and h(n,R
S
)
(n = a/N
S
). Thus, two MISO NN have been imple-
mented: both NNs receive as inputs the six datasheet
values (the open circuit voltage of the cell V
OC
, the
short circuit current I
SC
, the voltage and current at the
maximum power point I
MPP
and V
MPP
, and the tem-
perature coefficient of both I
SC
and V
OC
, respectively
α
T
and β
T
.), and returns as output either R
S
or a.
3.1 Dataset and Training Procedure
Description
The dataset used to train the neural networks in the
present work was acquired from a large database of
panels (California Energy Commission, 2013). The
database collects all the relevant datasheet informa-
tions for about 10000 photovoltaic panels. By using
the techniques illustrated in (Laudani et al., 2014b)
for each module of the database a five-parameter
model was identified. In order to verify the gener-
alization capabilities of our neural network, we de-
cided to use the modules with Monocrystalline Sili-
con (mono-Si) technology available on CEC database
ModelIdentificationforPhotovoltaicPanelsUsingNeuralNetworks
133
as training set, and the modules with multicrystalline
Silicon (multi-Si) technology as test set. Choosing
the mono-Si modules should also guarantee a training
dataset capable of representing an acceptable diver-
sity of panels with different characteristics. In addi-
tion, in this way we can assume that the neural iden-
tifier has learnt to solve this system of trascenden-
tal equations, since the two technologies differ sig-
nificantly in the reference parameters. The resulting
training set consists of about 4000 entries, whereas
the test set has more than 6000 modules. The inter-
polation capabilities of a NN can be correlated to the
number of neurons composing the network itself. On
the other hand, an relationship can be achieved for
each kind of problem, which links for a data general-
ization measure the number of neurons with the size
of the training set (more explanations can be found
in (Fulginei et al., 2013) and are out of the scope of
this work). In our case training set is very large with
respect to the number of neurons adopted and conse-
quently it is improbable to run into over trained net-
works. Finally, in our investigation, we adopted the
following principles: i) we use a NN with a number
of neurons in the hidden layer variable from 20 down
to 1; ii) each NN with a fixed number of neurons is
trained 10 times for 1000 epochs in order to perform
a statistical analysis of the results (minimum, average,
median and standard deviation are computed); iii) No
validation set has been used for early stopping tech-
niques. One of the reasons behind the choice of not
using the early stopping mechanism with a validation
set is the low number of epochs adopted with respect
the size of the training set. As stated, each single NN
was trained multiple times, changing the characteris-
tic size and making a statistic analysis of the train-
ing and validation performances for both sets (train-
ing and test data set). A total of 2x10x20 MLP were
trained and validated. The performance was evalu-
ated using as metric the MSE on training (or test) set
and the NNs output. The discussion on the results is
reported in the next section.
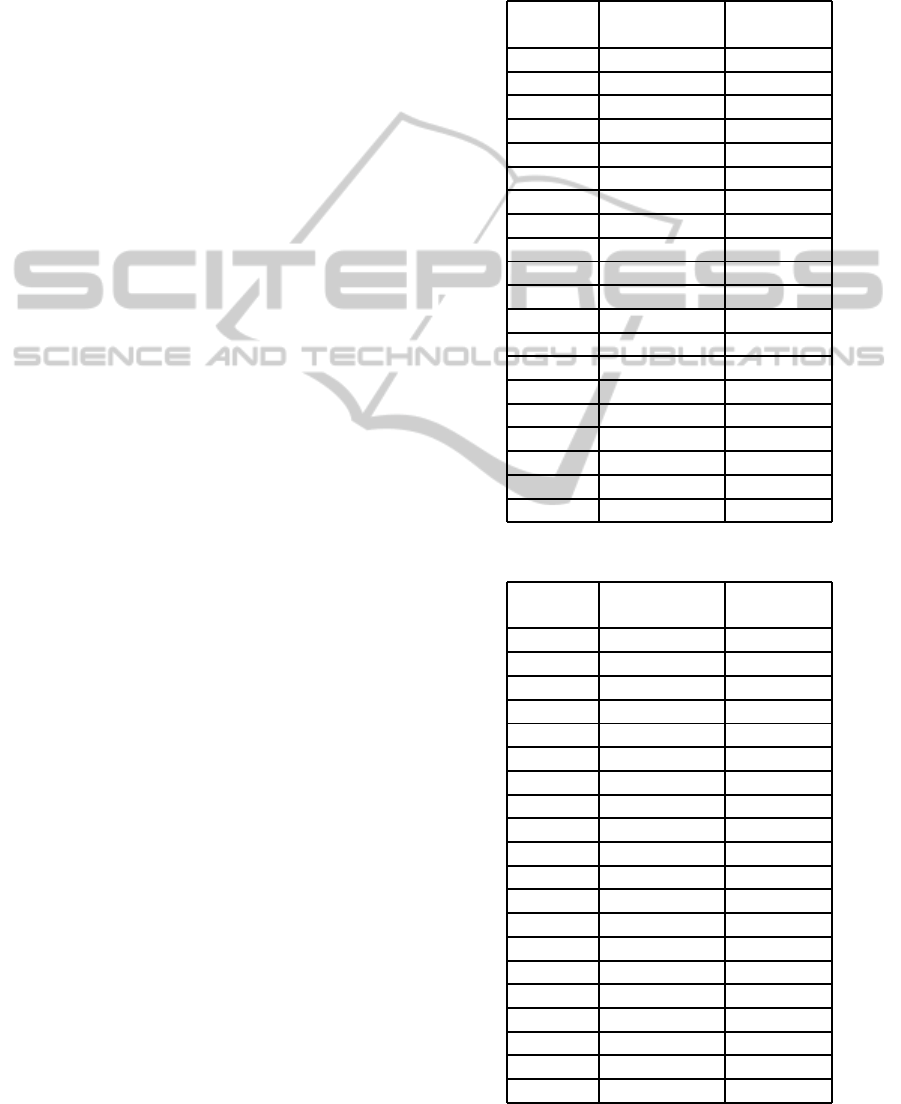
4 RESULTS AND DISCUSSION
The performance of the Neural identifier are summa-
rized in the tables 1 and 2 where the minimum MSE
for both training and test set are reported for parame-
ters a and R
S
, respectively. As it is possible to notice
the MSE reaches extremely low values (under 1E-7)
giving an accurate estimation of these two parame-
ters. It is worth to remind that the training set is made
of mono-Si modules whereas the test set is made of
multi-Si modules: the low MSE achieved on test set
allows us to confirm the generalization capabilities of
the Neural networks. In addition, the MSE decreases
by adding further neurons, and this trend should con-
tinue for a number of neurons higher than 20 in the
Table 1: Result for parameter a.
Neurons min MSE on min MSE
training set on test set
1 5.129E-02 4.133E-02
2 2.827E-04 2.947E-04
3 9.733E-06 5.271E-05
4 2.987E-06 1.461E-05
5 5.597E-07 3.566E-05
6 2.168E-07 3.079E-05
7 1.218E-07 1.312E-05
8 2.657E-08 3.103E-07
9 7.755E-08 5.162E-06
10 2.305E-08 1.233E-05
11 5.416E-09 9.532E-06
12 9.227E-09 9.425E-06
13 1.280E-08 3.649E-06
14 9.672E-09 5.569E-06
15 8.046E-09 1.073E-05
16 1.341E-08 8.131E-06
17 4.077E-09 2.652E-06
18 1.733E-08 6.063E-06
19 1.619E-09 5.078E-07
20 1.218E-09 9.606E-07
Table 2: Result for parameter R
S
.
Neurons min MSE on min MSE
training set on test set
1 7.033E-04 4.903E-04
2 6.979E-05 2.619E-05
3 3.844E-06 7.508E-06
4 1.444E-06 1.734E-06
5 3.914E-07 7.847E-07
6 5.802E-08 3.084E-07
7 2.049E-08 1.468E-07
8 5.303E-09 6.925E-08
9 5.316E-09 3.302E-08
10 1.679E-09 2.223E-08
11 1.266E-09 4.499E-08
12 6.415E-10 1.685E-08
13 5.282E-10 1.275E-08
14 3.045E-10 6.508E-09
15 4.748E-10 1.266E-08
16 1.715E-10 9.018E-09
17 1.789E-10 6.829E-09
18 1.919E-10 5.594E-09
19 8.278E-11 2.025E-09
20 1.100E-10 1.096E-08
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
134

hidden layer as well. However accurate results are
already achived with less than 20 neurons and con-
sequently it is not necessary to further add neurons.
In figures 5 and 6 the comparison between the val-
ues of a and R
S
parameters and NN output of the best
NNs trained, are shown for the first 1000 modules of
the test set. Practically the values returned by NN are
superimposed to the exact values (a maximum differ-
ence of the order of 1E-4 is achieved, which is surely
satisfactory since the input data have a precision lower
than this). This gap is clearly due to the precision of
the trained NN. This could be reduced if we further
train the network by using a high number of epochs.
But, in every case, it is already quite acceptable, con-
sidering that the state of the art approach for this com-
putation used often approximated formulae introduc-
ing error of the order of 1% (see (Cubas et al., 2014;
Li et al., 2013) for reviews of these approaches). At
the same time, from these accurate values, the other
dependent parameters R
SH
, I
0
and I
Irr
can be com-
puted precisely by using the respective closed forms,
confirming that the use of NN in conjunction with re-
duced closed forms allows to identify quickly the one
diode model. The suggested sizes in both cases is 19
neurons in the hidden layer: this choice is done con-
sidering the MSE complessively obtained for all the
10000 PV modules constituting the training and test
set. Indeed the aim is also to use this NN for the
solution of the problem in a real application and to
implement it in embedded systems, and consequently
we are interested in the best performance available on
all modules with a low computational cost. In this
sense, if we accept a higher error, the NNs with 8 neu-
rons allows to achieve a good accuracy estimation as
well (MSE about 1E-7) with a lower computational
cost. Lastly, it is worth noticing that the comparison
with the other approaches must be done in terms of
both computational cost/environment of implementa-
tion and precision; thus we have: exact methods, such
as those proposed in (Laudani et al., 2014b), which
although efficient cannot be implemented in low cost
microcontroller based system (Mancilla-David et al.,
2014); other high accuracy approaches (such as those
reported in (Li et al., 2013) or based on cluster anal-
ysis (Sandrolini et al., 2010)), which have prohibitive
computational cost; approximated methods, such that
one reported in (Cubas et al., 2014) which introduce
errors in the calculation of the parameters and have
a low computational cost. The approach herein pro-
posed is efficient from the computational cost point
of view and enough correct in the estimation of the
five-parameter model and thus it is a good trade-off
with respect the approaches presented in literature.
Although the MLP architecture could be not so ef-
100 200 300 400 500 600 700 800 900
0
10
20
30
40
50
60
70
80
module
a
parameter value
NN output
Figure 5: a parameter values versus estimated by Neural
Networks for 1000 modules of the test set.
ficient, we have verified that an implementation of
the same problem by using a Full Connected Cascade
NN (Wilamowski, 2009) did not give significativeim-
provement in the results and showed an equivalent
computational cost.
5 CONCLUSIONS
A neural network approach to identify PV one diode
model was proposed. The work started from the pre-
liminary analysis of the CEC database, which collects
the datasheet parameters of about 10000 PV panels.
For each panel in the database, the five parameters
for the classical one-diode model were determined
via numerical approach, creating a training and val-
idation dataset. A first approach, consisting of a di-
rect computation of parameters via MIMO NN was
found unsuccessful. Further analysis suggested to
avoid predicting all the parameters, and instead, use
the NN approach just on the independent ones. Then,
two MLP were used to interpolate the two param-
eters. From the obtained results, it is obvious that
100 200 300 400 500 600 700 800 900
0
0.2
0.4
0.6
0.8
1
1.2
module
R
S
parameter value
NN output
Figure 6: R
S
parameter values versus estimated on by Neu-
ral Networks for 1000 modules of the test set.
ModelIdentificationforPhotovoltaicPanelsUsingNeuralNetworks
135

in literature the neural network approach was often
overlooked because of the hard obstacle encountered
in the prediction of the shunt resistance. The solu-
tion of switching to closed forms for the identification
of the model, shifts the problem of the shunt resis-
tance calculus to the solution of an explicit non-linear
equation. In conclusion, NNs can identify the R
S
and
a parameters correctly, making the NN approach vi-
able for model identification in conjunction with the
adoption of reduced forms for the computation of the
three remaining unknown parameters of the one diode
model. The so achieved NN for the estimation of the
series resistance R
S
and the modified ideality factor
a, and the closed form for the computation of the re-
maining dependent parameters constitute a complete
tool extremely easy to be implemented in a microcon-
troller based architecture: this is another successful
step made thanks to Soft Computing techniques in the
development of intelligent systems for the monitoring
and the management of renewable generation plants.
REFERENCES
Askarzadeh, A. and Rezazadeh, A. (2013). Artificial bee
swarm optimization algorithm for parameters iden-
tification of solar cell models. Applied Energy,
102(0):943 – 949.
Blair, N. J., Dobos, A. P., and Gilman, P. (2010). Com-
parison of photovoltaic models in the system advisor
model. In Solar 2013, Baltimore, Maryland.
California Energy Commission (2013). CECPV
calculator version 4.0. [Online]. Avialable:
http://www.gosolarcalifornia.org/tools/nshpcalculator/.
Capizzi, G., Coco, S., Giuffrida, C., and Laudani, A. (2004).
A neural network approach for the differentiation of
numerical solutions of 3-d electromagnetic problems.
Magnetics, IEEE Transactions on, 40(2):953–956.
Carrasco, M., Mancilla-David, F., Fulginei, F. R., Laudani,
A., and Salvini, A. (2013). A neural networks-based
maximum power point tracker with improved dynam-
ics for variable dc-link grid-connected photovoltaic
power plants. International Journal of Applied Elec-
tromagnetics and Mechanics, 43(1).
Cubas, J., Pindado, S., and Victoria, M. (2014). On the an-
alytical approach for modeling photovoltaic systems
behavior. Journal of Power Sources, 247:467 – 474.
Cybenko, G. (1989). Approximation by superpositions of
a sigmoidal function. Mathematics of control, signals
and systems, 2(4):303–314.
Desoto, W., Klein, S., and Beckman, W. (2006). Improve-
ment and validation of a model for photovoltaic array
performance. Solar Energy, 80(1):78–88.
El-Naggar, K., AlRashidi, M., AlHajri, M., and Al-Othman,
A. (2012). Simulated annealing algorithm for pho-
tovoltaic parameters identification. Solar Energy,
86(1):266 – 274.
Fulginei, F. R., Laudani, A., Salvini, A., and Parodi, M.
(2013). Automatic and parallel optimized learning
for neural networks performing MIMO applications.
Advances in Electrical and Computer Engineering,
13(1):3–12.
Hornik, K., Stinchcombe, M., and White, H. (1989). Multi-
layer feedforward networks are universal approxima-
tors. Neural networks, 2(5):359–366.
Hunter, D., Yu, H., Pukish, M. S., Kolbusz, J., and Wil-
amowski, B. M. (2012). Selection of proper neural
network sizes and architectures - A comparative study.
Industrial Informatics, IEEE Trans. on, 8(2):228–240.
Ilonen, J., Kamarainen, J.-K., and Lampinen, J. (2003).
Differential evolution training algorithm for feed-
forward neural networks. Neural Processing Letters,
17(1):93–105.
Ishaque, K. and Salam, Z. (2011). An improved modeling
method to determine the model parameters of photo-
voltaic (PV) modules using differential evolution (de).
Solar Energy, 85(9):2349 – 2359.
Jiang, L. L., Maskell, D. L., and Patra, J. C. (2013). Pa-
rameter estimation of solar cells and modules using
an improved adaptive differential evolution algorithm.
Applied Energy, 112(0):185 – 193.
Kim, C.-T. and Lee, J.-J. (2008). Training two-layered feed-
forward networks with variable projection method.
Neural Networks, IEEE Trans. on, 19(2):371–375.
Laudani, A., Fulginei, F. R., and Salvini, A. (2014a). High
performing extraction procedure for the one-diode
model of a photovoltaic panel from experimental I–V
curves by using reduced forms. Solar Energy, 103:316
– 326.
Laudani, A., Fulginei, F. R., Salvini, A., Lozito, G. M., and
Coco, S. (2014b). Very fast and accurate procedure
for the characterization of photovoltaic panels from
datasheet information. International Journal of Pho-
toenergy, 2014. Article ID 946360.
Laudani, A., Mancilla-David, F., Riganti-Fulginei, F., and
Salvini, A. (2013). Reduced-form of the photovoltaic
five-parameter model for efficient computation of pa-
rameters. Solar Energy, 97(0):122 – 127.
Li, Y., Huang, W., Huang, H., Hewitt, C., Chen, Y., Fang,
G., and Carroll, D. L. (2013). Evaluation of methods
to extract parameters from currentvoltage characteris-
tics of solar cells. Solar Energy, 90(0):51 – 57.
Liu, Y.-H., Liu, C.-L., Huang, J.-W., and Chen, J.-H.
(2013). Neural-network-based maximum power point
tracking methods for photovoltaic systems operating
under fast changing environments. Solar Energy,
89:42–53.
Mancilla-David, F., Riganti-Fulginei, F., Laudani, A., and
Salvini, A. (2014). A neural network-based low-cost
solar irradiance sensor. Instrumentation and Measure-
ment, IEEE Trans. on.
Parodi, M., Fulginei, F. R., and Salvini, A. (2012). Learn-
ing optimization of neural networks used for mimo ap-
plications based on multivariate functions decomposi-
tion. Inverse Problems in Science and Engineering,
20(1):29–39.
Rajasekar, N., Kumar, N. K., and Venugopalan, R. (2013).
NCTA2014-InternationalConferenceonNeuralComputationTheoryandApplications
136
Bacterial foraging algorithm based solar {PV} param-
eter estimation. Solar Energy, 97(0):255 – 265.
Rawat, R., Patel, J. K., and Manry, M. T. (2013). Mini-
mizing validation error with respect to network size
and number of training epochs. In Neural Networks
(IJCNN), The 2013 International Joint Conference on,
pages 1–7. IEEE.
Sandrolini, L., Artioli, M., and Reggiani, U. (2010). Nu-
merical method for the extraction of photovoltaic
module double-diode model parameters through clus-
ter analysis. Applied Energy, 87(2):442 – 451.
Siddiqui, M. and Abido, M. (2013). Parameter estimation
for five- and seven-parameter photovoltaic electrical
models using evolutionary algorithms. Applied Soft
Computing, 13(12):4608 – 4621.
Teoh, E., Tan, K., and Xiang, C. (2006). Estimating the
number of hidden neurons in a feedforward network
using the singular value decomposition. Neural Net-
works, IEEE Trans. on, 17(6):1623–1629.
Wilamowski, B. M. (2009). Neural network architectures
and learning algorithms. Industrial Electronics Mag-
azine, IEEE, 3(4):56–63.
Xu, C., Wang, C., Ji, F., and Yuan, X. (2012). Finite-
element neural network-based solving 3-d differential
equations in mfl. Magnetics, IEEE Transactions on,
48(12):4747–4756.
Yadav, A. K. and Chandel, S. (2014). Solar radiation pre-
diction using artificial neural network techniques: A
review. Renewable and Sustainable Energy Reviews,
33:772 – 781.
Zagrouba, M., Sellami, A., Bouacha, M., and Ksouri, M.
(2010). Identification of PV solar cells and mod-
ules parameters using the genetic algorithms: Appli-
cation to maximum power extraction. Solar Energy,
84(5):860 – 866.
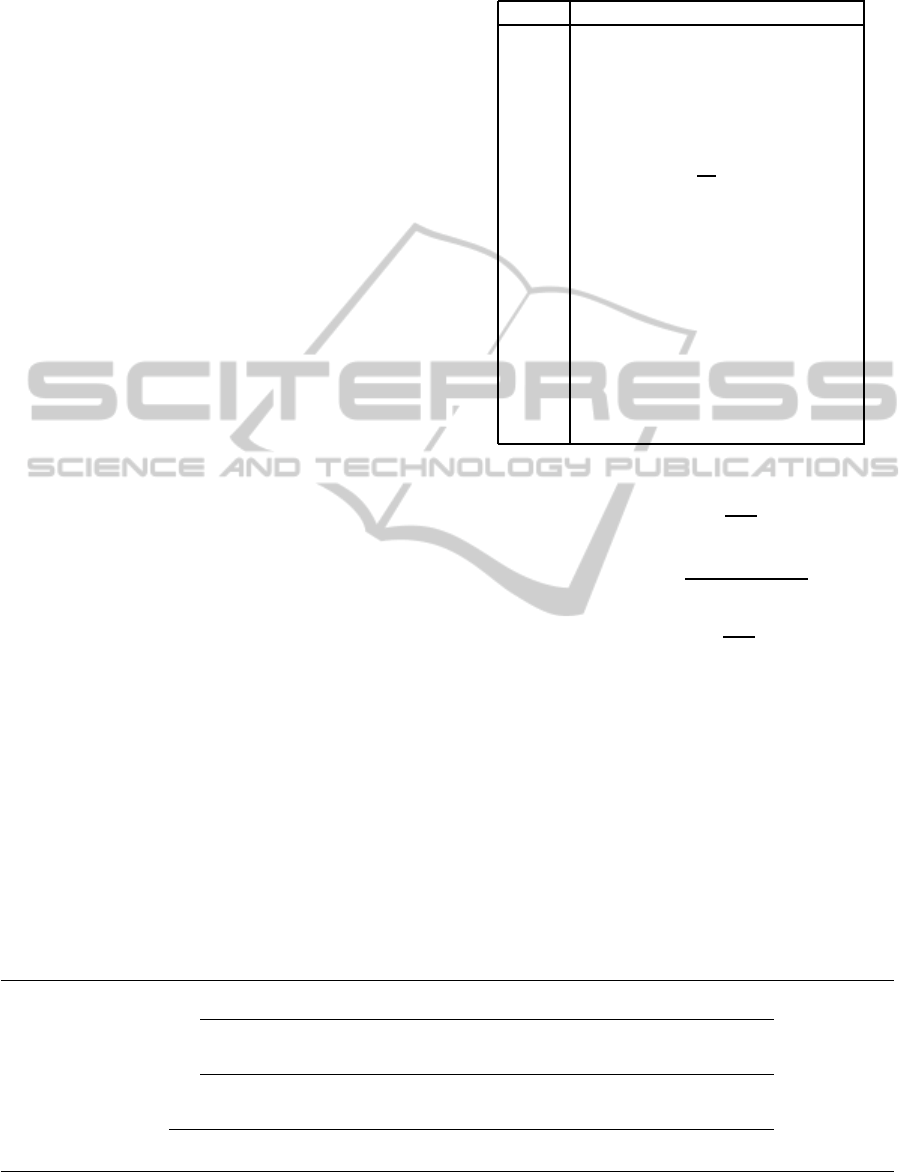
APPENDIX
In this appendix we summarize the main symbols
and formulae useful for understanding the one-diode
model and its reduced form. In particular table 3 re-
ports the nomenclature used and the definition of pa-
rameters. With the aim to simplify the notation and
the expressions, the shunt conductance G
SH
= R
−1
SH
will be used instead of R
SH
, and the following quanti-
=
(
− )[ ( + − − ) + ]
[( + − ) − ]
(8)
0
=
( − 2 )
( − )[ ( + − − ) + ]
(9)
=
[ ( − + ) + (2 (1 − ) − )]
( − )[ ( + − − ) + ]
(10)
Table 3: List of the technical parameters used in this work.
Name Value or Description
S Irradiance
T Cell temperature
n Ideality factor
a N
S
n
N
s
Number of series modules/cells
T
ref
25
◦
C at SRC
S
ref
1000
W
m
2
at SRC
R
S
Series resistance at SRC
I
Irr
Photocurrent at SRC
I
0
Reverse saturation current at SRC
R
SH
Shunt resistance at SRC
G
SH
R
−1
SH
V
OC
Open circuit voltage at SRC
I
SC
Short circuit current at SRC
V
MPP
Maximum power voltage at SRC
I
MPP
Maximum power current at SRC
α
T
Temperature coeff. for I
SC
β
T
Temperature coeff. for V
OC
ties are defined:
EXP
OC
= exp
V
OC
aV
T
(5)
EXP
MPP
= exp
V
MPP
+ R
S
I
MPP
aV
T
(6)
EXP
SC
= exp
I
SC
aV
T
(7)
The formulae (2),(3) and (4), which express R
SH
, I
0
and I
irr
as function of R
S
and modified ideality factor
a are respectively (8), (9) and (10).
ModelIdentificationforPhotovoltaicPanelsUsingNeuralNetworks
137
