
Paris-rue-Madame Database
A 3D Mobile Laser Scanner Dataset for Benchmarking Urban Detection,
Segmentation and Classification Methods
Andr´es Serna
1
, Beatriz Marcotegui
1
, Franc¸ois Goulette
2
and Jean-Emmanuel Deschaud
2
1
MINES ParisTech, CMM-Center for Mathematical Morphology, 35 rue St Honor´e, 77305 Fontainebleau, France
2
MINES ParisTech, CAOR-Center for Robotics, 60 boulevard Saint-Michel, 75272 Paris, France
Keywords:
3D Database, Mobile Laser Scanner, Urban Analysis, Segmentation, Classification, Point-wise Evaluation.
Abstract:
This paper describes a publicly available 3D database from the rue Madame, a street in the 6
th
Parisian district.
Data have been acquired by the Mobile Laser Scanning (MLS) system L3D2 and correspond to a 160 m long
street section. Annotation has been carried out in a manually assisted way. An initial annotation is obtained
using an automatic segmentation algorithm. Then, a manual refinement is done and a label is assigned to
each segmented object. Finally, a class is also manually assigned to each object. Available classes include
facades, ground, cars, motorcycles, pedestrians, traffic signs, among others. The result is a list of (X, Y, Z,
reflectance, label, class) points. Our aim is to offer, to the scientific community, a 3D manually labeled dataset
for detection, segmentation and classification benchmarking. With respect to other databases available in the
state of the art, this dataset has been exhaustively annotated in order to include all available objects and to
allow point-wise comparison.
1 INTRODUCTION
Nowadays, LiDAR technology (“light detection and
ranging”) has been prospering in the remote sensing
community thanks to developments such as: Aerial
Laser Scanning (ALS), useful for large scale build-
ings survey, roads and forests; Terrestrial Laser Scan-
ning (TLS), for more detailed but slower urban sur-
veys in outdoor and indoor environments; Mobile
Laser Scanning (MLS), less precise than TLS but
much more productive since the sensors are mounted
on a vehicle; and more recently, “stop and go” sys-
tems, easy transportable TLS systems making a trade
off between precision and productivity.
Thanks to all these technologies, the amount of
available 3D geographical data and processing tech-
niques has bloomed in recent years. Many semi-
automatic and automatic methods aiming at analyzing
3D urban point clouds can be found in the literature. It
is an active research area. However, there is not a gen-
eral consensus about the best detection, segmentation
and classification methods. This choice is application
dependent. One of the main drawbacks is the lack of
publicly available databases allowing benchmarking.
In the literature, most available urban data consist
in close-range images, aerial images, satellite images
but a few laser datasets (ISPRS, 2013; IGN, 2013).
Moreover, manual annotations and algorithm outputs
are rarely found in available 3D repositories (N¨uchter
and Lingemann, 2011; CoE LaSR, 2013).
Some available data include Oakland dataset
(Munoz et al., 2009), which contains 1.6 million
points collected around Carnegie Mellon University
campus in Oakland, Pittsburgh, USA. Data are pro-
vided in ASCII format: (X, Y, Z, label, confidence)
one point per line, vrml files and label counts. The
training/validation and testing data contains 5 labels
(scatter misc, default wires, utility poles, load bear-
ing and facades). Ohio database (Golovinskiy et al.,
2009) is a combination of ALS and TLS data in Ot-
tawa city (Ohio, USA). It contains 26 tiles 100 ×
100 meters each with several objects such as build-
ings, trees, cars and lampposts. However, ground
truth annotations only consists in a 2D labeled point
in the center of each object. In that sense, segmenta-
tions results cannot be evaluated point by point. En-
schede database (Zhou and Vosselman, 2012) con-
tains residential streets approximatively 1 km long in
the Enschede city (The Netherlands). Ground truth
annotation consists in 2D geo-referenced lines mark-
ing curbstones. A well- defined evaluation method
is available using buffers around each 2D line. The
819
Serna A., Marcotegui B., Goulette F. and Deschaud J..
Paris-rue-Madame Database - A 3D Mobile Laser Scanner Dataset for Benchmarking Urban Detection, Segmentation and Classification Methods.
DOI: 10.5220/0004934808190824
In Proceedings of the 3rd International Conference on Pattern Recognition Applications and Methods (USA-2014), pages 819-824
ISBN: 978-989-758-018-5
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

drawback of this dataset is that no other objects are
annotated. Paris-rue-Soufflot database (Hern´andez
and Marcotegui, 2009) contains MLS data from a
street 500 m long in the 5
th
Parisian district. Six
classes have been annotated: facades, ground, cars,
lampposts, pedestrians and others.
In this paper, we present a 3D MLS database for
benchmarking detection, segmentation and classifica-
tion methods. Each point in the 3D point cloud has
been segmented and classified, allowing point-wise
evaluations. Additionally, our annotation includes all
available objects in the urban scene. Data have been
acquired and processed in the framework of TerraMo-
bilita project (http://cmm.ensmp.fr/TerraMobilita/).
Paper organization is as follows. Section 2 re-
minds some basic definitions. Section 3 describes
Paris-rue-Madame database. Section 4 explains the
MLS system and acquisition details. Section 5 briefly
presents our manually assisted annotation protocol.
Finally, Section 7 concludes the work.
2 BACKGROUND
A typical 3D urban analysis method includes 5 main
steps: i) data filtering/down-sampling in order to re-
duce outliers and redundant data; ii) Digital Terrain
Model (DTM) generation; iii) object detection in or-
der to define object hypotheses and regions of interest;
iv) object segmentation in order to extract each indi-
vidual object; and v) object classification in order to
assign a semantic category to each object. In the sci-
entific community several definitions can be found for
detection, segmentation and classification steps. For
clarity, let us define these concepts in the way we in-
tend they should be understood with this dataset:
Detection: An object is considered detected if it is
included in the list of object hypotheses, i.e. it
has not been suppressed by any filtering/down-
sampling method and it has not been included as
part of the DTM. Note that an object hypothe-
sis may contain several connected objects or even
contain only a part of an object. In the detection
step, we are only interested in keeping all pos-
sible objects. This is important because in most
works reported in the literature, non-detected ob-
jects cannot be recovered in subsequent algorithm
steps.
Segmentation: An object is considered segmented if
it is correctly isolated as a single object, i.e. con-
nected objects are correctly separated (there is no
sub-segmentation) and each individual object is
entirely inside of only one connected component
(there is no over-segmentation). This is important
because many algorithms based on clustering and
connected components can wrongly gather ob-
jects touching each other, e.g. motorcycles parked
next to the facade, pedestrians walking together,
cars closely parked to others, among others.
Classification: In the classification step, a category
is assigned to each segmented object. Each class
represents an urban semantic entity. Depending
on the application, several classes can be defined:
facade, ground, curbstone, pedestrian, car, lamp-
post, etc.
3 DATA DESCRIPTION
Paris-rue-Madame dataset contains 3D MLS data
from rue Madame, a street in the 6
th
Parisian district
(France). Figure 1 shows an orthophoto from the test
zone, approximatively a 160 m long street section be-
tween rue M´ezi`eres and rue Vaugirard. The acquisi-
tion was made on February 8, 2013 at 13:30 Universal
Time (UT).
Figure 1: Rue Madame, Paris (France). Orthophoto from
IGN-Google Maps.
The dataset contains two PLY files with 10
million points each. Each file contains a list of
(X, Y, Z, reflectance, label, class) points, where
XYZ correspond to geo-referenced (E,N,U) coordi-
nates in Lambert 93 and altitude IGN1969 (grid
RAF09) reference system, reflectance is the laser in-
tensity, label is the object identifier obtained after
segmentation and class determines the object cate-
gory. An offset has been subtracted from XY co-
ordinates with the aim of increasing data precision:
X
0
= 650976 m and Y
0
= 6861466 m, respectively.
The available files are “GT
Madame1 2.ply” and
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
820
“GT Madame1 3.ply”, both of them coded as binary
big endian version 1.
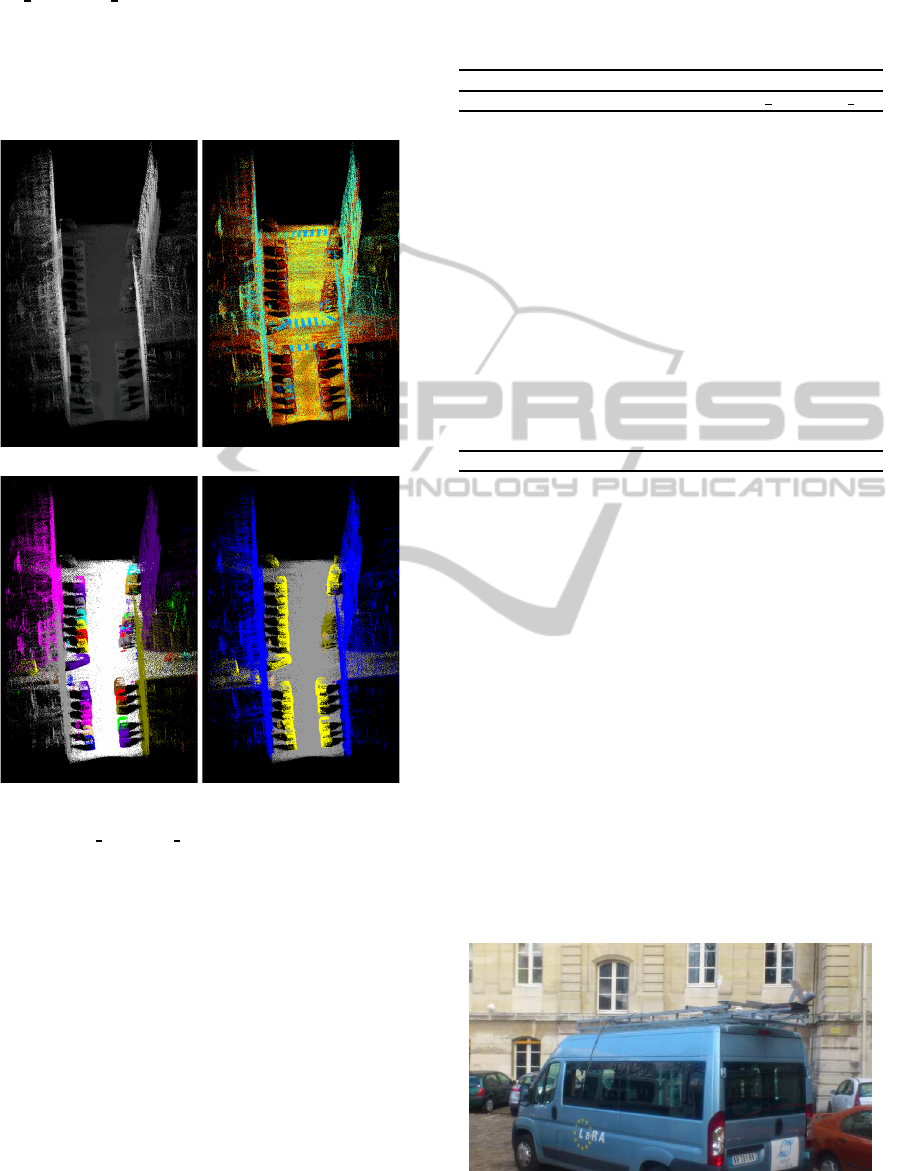
Figure 2 presents one of the 3D point clouds of
this database colored by the point height (Z coordi-
nate), the reflectance, the object label and the object
class.
(a) Height (Z coordinate). (b) Laser reflectance.
(c) Object label. (d) Object class.
Figure 2: “GT
Madame1 2.ply” file: 3D point cloud col-
ored by its available fields. For the object label, each color
represents a different object (only for visualization pur-
poses, some colors have been repeated). For object class
visualization: facades (blue), ground (gray), cars (yellow),
motorcycles (olive), traffic signs (goldenrod), pedestrians
(pink).
This database contains 642 objects categorized in
26 classes, as shown in Table 1. It is noteworthy that
several objects inside buildings have been acquired
through windows and open doors, these objects have
been annotated as facades. Other several “special”
classes have been added because they are too different
to be mixed with others. For instance, fast pedestrians
and pedestrians+something have different geometri-
cal features than a simple pedestrian. The idea of this
annotation is including as much classes as possible,
then each user may gather or exclude classes depend-
ing on the application.
Table 1: Available classes and number of objects in the
Paris-Rue Madame dataset.
Number of objects
Class Class name file 1 2 file 1 3
0 Background 7 35
1 Facade 181 117
2 Ground 4 23
4 Cars 39 31
7 Light poles 0 1
9 Pedestrians 3 7
10 Motorcycles 23 9
14 Traffic signs 5 1
15 Trash can 2 1
19 Wall Light 6 1
20 Balcony Plant 3 2
21 Parking meter 1 1
22 Fast pedestrian 2 2
23 Wall Sign 1 3
24 Pedestrian + something 1 0
25 Noise 46 80
26 Pot plant 0 4
Total 324 318
It is noteworthy that this database is different from
others available in the state of the art since the entire
3D point cloud has been segmented and classified, i.e.
each point contains a label and a class. Thus, point-
wise evaluation of detection, segmentation and classi-
fication methods is possible.
4 ACQUISITION
The acquisition has been carried out by the MLS
system L3D2 from the robotics laboratory CAOR-
MINES ParisTech (Goulette et al., 2006). This sys-
tem is equipped with a Velodyne HDL32, as shown in
Figure 3. In this system, several lasers are mounted on
upper and lower blocks of 32 lasers each and the en-
tire unit spins, giving much denser point clouds than
classic Riegl sensors (Velodyne, 2012).
Figure 3: MLS system L3D2 from CAOR-MINES Paris-
Tech
Paris-rue-MadameDatabase-A3DMobileLaserScannerDatasetforBenchmarkingUrbanDetection,Segmentationand
ClassificationMethods
821
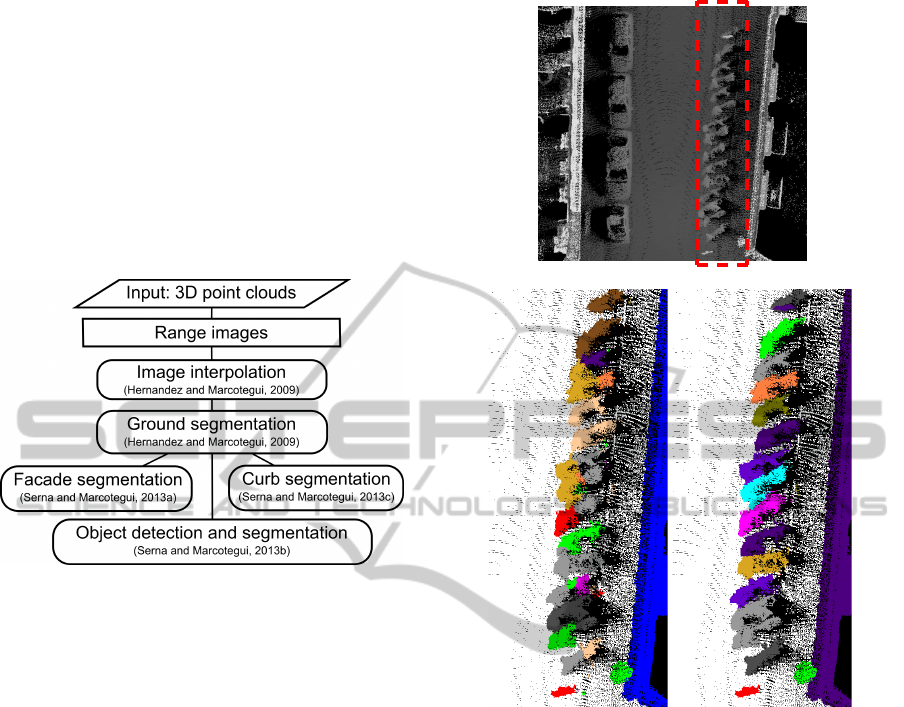
5 ANNOTATION
Annotation has been carried out in a manually as-
sisted way. An initial segmentation is obtained us-
ing an automatic method based on elevation im-
ages (Serna and Marcotegui, 2013b). The work-flow
is shown in Figure 4. For further details and complete
analyses in each step, the reader is also encouraged
to review the following three works (Hern´andez and
Marcotegui, 2009) (Serna and Marcotegui, 2013a)
(Serna and Marcotegui, 2013c).
Figure 4: Work-flow of our automatic segmentation
methodology.
After this automatic method, a manual refinement
is carried out in order to correct possible errors in
detection and segmentation steps. Then, a label is
assigned to each segmented object. Finally, a class
is also manually assigned in order to categorize each
segmented object.
During manual refinement, three typical segmen-
tation errors are both found and corrected: i) bad seg-
mentation of some connected objects, e.g. motorcy-
cles parked close to each other are not correctly sep-
arated, as shown in Figure 5; ii) over-segmentation of
some objects due to artifacts or noise, i.e. some cars
are over-segmented on their roof, as shown in Fig-
ure 6; iii) sub-segmentation of some objects, i.e. some
objects touching the facades are not well separated, as
shown in Figure 7.
6 DOWNLOAD & LICENSE
Paris-rue-Madame database is available at:
http://cmm.ensmp.fr/ serna/rueMadameDataset.html
and it is made available under the Creative Commons
Attribution Non-Commercial No Derivatives (CC-
BY-NC-ND-3.0) Licence.
(Cette œuvre est mise `a disposition selon les termes
de la Licence Creative Commons Attribution - Pas
(a) Height
(b) Automatic segmen-
tation (zoomed)
(c) Manual refinement
(zoomed)
Figure 5: Manual refinement of connected motorcycles.
d’Utilisation Commerciale - Pas de Modification 3.0
France http://creativecommons.org/licenses/by-nc-
nd/3.0/fr/.
7 CONCLUSIONS
We have presented a 3D MLS database manually an-
notated from rue Madame, a street in the 6
th
Parisian
district. Each 3D point has been labeled and classi-
fied, resulting in a list of (X, Y, Z, reflectance, label,
class) points.
The database has been acquired by the L3D2 ve-
hicle, a MLS system from the Robotics laboratory
(CAOR) at MINES ParisTech. A distinctive feature
of this system is that it uses a Velodyne sensor aligned
in a similar way to a Riegl sensor but providing much
denser 3D point clouds.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
822
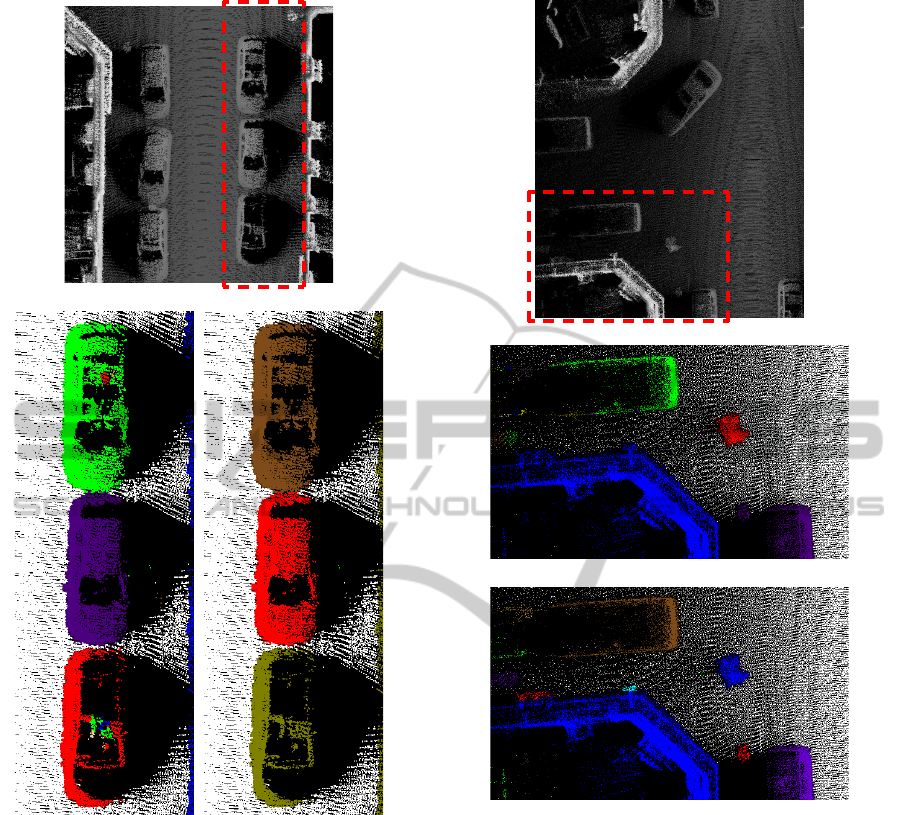
(a) Height
(b) Automatic segmenta-
tion (zoomed)
(c) Manual refinement
(zoomed)
Figure 6: Manual refinement of over-segmented cars.
Annotation has been carried out in a manual as-
sisted way by the Center for mathematical morphol-
ogy (CMM) at MINES ParisTech. First, an automatic
segmentation method is applied. Then, manual refine-
ment and classification are done. This approach is
faster than a completely manual approach and it pro-
vides accurate results. This dataset is different from
others available in the state of the art since each point
has been segmented and classified, allowing point-
wise benchmarking.
In future works, other datasets acquired in the
framework of TerraMobilita project will be annotated
and made available to the scientific community.
(a) Height
(b) Automatic segmentation (zoomed)
(c) Manual refinement (zoomed)
Figure 7: Manual refinement of sub-segmented objects
touching the facade.
ACKNOWLEDGEMENTS
The work reported in this paper has been performed
as part of Cap Digital Business Cluster TerraMobilita
Project.
REFERENCES
CoE LaSR (2013). Centre of Excellence in Laser
Scanning Research. Finnish Geodetic Institut.
http://www.fgi.fi/coelasr/ (Last accessed: December
16, 2013).
Paris-rue-MadameDatabase-A3DMobileLaserScannerDatasetforBenchmarkingUrbanDetection,Segmentationand
ClassificationMethods
823

Golovinskiy, A., Kim, V., and Funkhouser, T. (2009).
Shape-based recognition of 3D point clouds in urban
environments. In IEEE International Conference on
Computer Vision, pages 2154–2161. Kyoto, Japan.
Goulette, F., Nashashibi, F., Ammoun, S., and Laurgeau,
C. (2006). An integrated on-board laser range sens-
ing system for On-the-Way City and Road Modelling.
The ISPRS International Archives of Photogramme-
try, Remote Sensing and Spatial Information Sciences,
XXXVI-1:1–6.
Hern´andez, J. and Marcotegui, B. (2009). Filtering of ar-
tifacts and pavement segmentation from mobile Li-
DAR data. The ISPRS International Archives of the
Photogrammetry, Remote Sensing and Spatial Infor-
mation Sciences, XXXVIII-3/W8:329–333.
IGN (2013). IGN - Geospatial and Terrestrial Im-
agery. IGN French National Mapping Agency.
http://isprs.ign.fr/home
en.htm (Last accessed: Octo-
ber 28, 2013).
ISPRS (2013). The ISPRS data set collection. ISPRS In-
ternational Society for Photogrammetry and Remote
Sensing. http://www.isprs.org/data/ (Last accessed:
October 28, 2013).
Munoz, D., Bagnell, J. A., Vandapel, N., and Herbert,
M. (2009). Contextual Classification with Functional
Max-Margin Markov Networks. In IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR).
N¨uchter, A. and Lingemann, K. (2011). Robotic 3D Scan
Repository. Jacobs University Bremen gGmbH and
University of Osnabr¨uck. http://kos.informatik.uni-
osnabrueck.de/3Dscans/ (Last accessed: December
16, 2013).
Serna, A. and Marcotegui, B. (2013a). Attribute controlled
reconstruction and adaptive mathematical morphol-
ogy. In 2013 International Symposium on Mathemat-
ical Morphology (ISMM), pages 207–218, Uppsala,
Sweden.
Serna, A. and Marcotegui, B. (2013b). Detection, seg-
mentation and classification of 3D urban objects us-
ing mathematical morphology and supervised learn-
ing. {ISPRS} Journal of Photogrammetry and Remote
Sensing, 0(0):1–. (Accepted).
Serna, A. and Marcotegui, B. (2013c). Urban accessibil-
ity diagnosis from mobile laser scanning data. ISPRS
Journal of Photogrammetry Remote Sensing, 84:23–
32.
Velodyne (2012). The HDL-32E Velodyne
LiDAR sensor. Velodyne Lidar 2012.
http://velodynelidar.com/lidar/hdlproducts/hdl32e.aspx
(Last accessed: December 16, 2013).
Zhou, L. and Vosselman, G. (2012). Mapping curbstones in
airborne and mobile laser scanning data. International
Journal of Applied Earth Observation and Geoinfor-
mation, 18(1):293–304.
ICPRAM2014-InternationalConferenceonPatternRecognitionApplicationsandMethods
824
