
One-Step or Two-Step Optimization and the Overfitting Phenomenon
A Case Study on Time Series Classification
Muhammad Marwan Muhammad Fuad
Forskningsparken 3, Institutt for kjemi, NorStruct
The University of Tromsø - The Arctic University of Norway, NO-9037 Tromsø, Norway
Keywords: Bio-inspired Optimization, Differential Evolution, Overfitting, Time Series Classification.
Abstract: For the last few decades, optimization has been developing at a fast rate. Bio-inspired optimization
algorithms are metaheuristics inspired by nature. These algorithms have been applied to solve different
problems in engineering, economics, and other domains. Bio-inspired algorithms have also been applied in
different branches of information technology such as networking and software engineering. Time series data
mining is a field of information technology that has its share of these applications too. In previous works we
showed how bio-inspired algorithms such as the genetic algorithms and differential evolution can be used to
find the locations of the breakpoints used in the symbolic aggregate approximation of time series
representation, and in another work we showed how we can utilize the particle swarm optimization, one of
the famous bio-inspired algorithms, to set weights to the different segments in the symbolic aggregate
approximation representation. In this paper we present, in two different approaches, a new meta
optimization process that produces optimal locations of the breakpoints in addition to optimal weights of the
segments. The experiments of time series classification task that we conducted show an interesting example
of how the overfitting phenomenon, a frequently encountered problem in data mining which happens when
the model overfits the training set, can interfere in the optimization process and hide the superior
performance of an optimization algorithm.
1 INTRODUCTION
For the last few decades, optimization has been
developing at a fast rate. Novel algorithms appear
and new applications emerge in different fields of
engineering, economics, and science. The purpose of
an optimization process is to find the best-suited
solution of a problem subject to given constraints.
These constraints can be in the boundaries of the
parameters controlling the optimization problem, or
in the function to be optimized. This can be
expressed mathematically as follows: Let
nbp21
x,...,x,xX
be the candidate solution to the
problem for which we are searching an optimal
solution. Given a function
RR
nbp
U:f (nbp
is the number of parameters), find the solution
*
nbp
*
2
*
1
*
x,...,x,xX
which satisfies:
UX,XfXf
*
.
The function f is called
the
fitness function, or the objective function (These
Figure 1: Some of the main bio-inspired metaheuristics.
two concepts are not really identical, but in this
paper we will use them interchangeably).
Metaheuristics
are probabilistic optimization
Bio-inspired Optimization
Swarm Intelligence
Evolutionary Algorithms
Genetic Algorithms
Differential Evolution
Genetic Programming
Evolution Strategies
Particle Swarm Optimization
Artificial Ant Colony
Artificial Bee Colony
645
Muhammad Fuad M..
One-Step or Two-Step Optimization and the Overfitting Phenomenon - A Case Study on Time Series Classification.
DOI: 10.5220/0004916706450650
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 645-650
ISBN: 978-989-758-015-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

algorithms which are applicable to a large variety of
optimization problems. Metaheuristics can be
divided into
single solution –based metaheuristics
and population-based metaheuristics. Many of these
metaheuristics are inspired by natural processes,
natural phenomena, or by the collective intelligence
of natural agents, hence the term
bio-inspired, also
called nature-inspired, optimization algorithms.
Figure 1 shows the main bio-inspired metaheuristics.
One of the main bio-inspired optimization
families is
Evolutionary Algorithms (EA). EA are
population-based metaheuristics that use the
mechanisms of Darwinian evolution. The
Genetic
Algorithm
(GA) is the main member of EA. GA is
an optimization and search technique based on the
principles of genetics and natural selection (Haupt
and Haupt, 2004). GA has the following elements: a
population of individuals, selection according to
fitness, crossover to produce new offspring, and
random mutation of new offspring (Mitchell, 1996).
Differential Evolution (DE) is an optimization
method which is mainly effective to solve
continuous problems. DE is also based on the
principles of genetics and natural selection.
DE has the same elements as a standard
evolutionary algorithm; i.e. a population of
individuals, selection according to fitness, crossover,
and random mutation. DE starts with a collection of
randomly chosen individuals constituting a
population whose size is
popsize. Each of these
solutions is a vector of
nbp dimensions and it
represents a possible solution to the problem at hand.
The fitness function of each individual is evaluated.
The next step is optimization. In this step for each
individual, which we call the
target vector
i
T
, of the
population three mutually distinct individuals
1r
V
,
2r
V
,
3r
V
, and different from
i
T
, are chosen at
random from the population. The
donor vector D
is
formed as a weighted difference of two of
1r
V
,
2r
V
,
3r
V
added to the third; i.e.
321 rrr
VVFVD
.
F
is called the mutation
factor
or the differentiation constant and it is one of
the control parameters of DE.
The
trial vector R
is formed from elements of
the target vector
i
T
and elements of the donor
vector
D
. In the following we present the crossover
scheme presented in (Feoktistov, 2006) which we
adopt in this paper; an integer
Rnd is randomly
chosen among the dimensions
nbp,1 . Then the trial
vector
R
is formed as follows:
otherwise
t
iRndC1,0randif
ttFt
t
j,i
rj,i
3r,i2r,i1r,i
i
(1)
where
nbp,...,i 1
.
r
C is the crossover constant,
which is another control parameter.
The next step of DE is selection. This step
decides which of the trial vector and the target
vector will survive in the next generation and which
will die out. The selection is based on which of the
two vectors; trial and target, yields a better value of
the fitness function. Crossover and selection repeat
for a certain number of generations.
□
Data mining is a field of computer science which
handles several tasks such as classification,
clustering, anomaly detection, and others.
Processing these tasks usually requires extensive
computing. As with other fields of computer science,
different papers have proposed applying bio-inspired
optimization to data mining tasks (Muhammad Fuad,
2012a, 2012b, 2012c, 2012d).
Data mining models may suffer from what is
called
overfitting. A classification algorithm is said
to
overfit to the training data if it generates a
representation of the data that depends too much on
irrelevant features of the training instances, with the
result that it performs well on the training data but
relatively poorly on unseen instances (Bramer,
2007). In overfitting the algorithm memorizes the
training set at the expense of generalizability to the
validation set (Larose, 2005).
We will show in this paper a generalization of
the optimization methods that we presented in
(Muhammad Fuad, 2012b, 2012c, 2012d) and how
the overfitting phenomenon can interfere to alter the
outcome of the optimization process. In Section 2
we present the problem and our previous work on it
and the new generalization, in two different
approaches, of this previous work. We compare
these two approaches in Section 3 and we discuss
the results of the experiments in Section 4. We
conclude the paper in Section 5.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
646

2 ONE-STEP OR TWO-STEP
OPTIMIZATION OF THE
SYMBOLIC AGGREGATE
APPROXIMATION
A time series S is an ordered collection:
nn2211
v,t,...,v,t,v,tS
(2)
where
n21
t...tt , and where
i
v are the values
of the observed phenomenon at time points
i
t .
Time series data mining handles several tasks
such as classification, clustering, similarity search,
motif discovery, anomaly detection, and others.
Time series are high-dimensional data so they
are usually processed by using representation
methods that are used to extract features from these
data and project them on lower-dimensional spaces.
The
Symbolic Aggregate approXimation method
(SAX) (Lin et. al., 2003) is one of the most
important representation methods of time series. The
main advantage of SAX is that the similarity
measure it uses, called MINDIST, uses statistical
lookup tables, which makes it easy to compute with
an overall complexity of
NO . SAX is based on
the assumption that normalized time series have
Gaussian distribution, so by determining the
breakpoints that correspond to a particular alphabet
size, one can obtain equal-sized areas under the
Gaussian curve. SAX is applied as follows:
1-The time series are normalized.
2-The dimensionality of the time series is reduced
using PAA (Keogh
et. al., 2000), (Yi and Faloutsos,
2000).
3-The PAA representation of the time series is
discretized by determining the number and location
of the breakpoints (The number of the breakpoints is
chosen by the user). Their locations are determined,
as mentioned above, using Gaussian lookup tables.
The interval between two successive breakpoints is
assigned to a symbol of the alphabet, and each
segment of PAA that lies within that interval is
discretized by that symbol.
The last step of SAX is using the following
similarity measure:
N
i
ii
r
ˆ
,s
ˆ
dist
N
n
R
ˆ
,S
ˆ
MINDIST
1
2
(3)
Where
n
is the length of the original time series,
N is the length of the strings (the number of the
segments),
S
ˆ
and R
ˆ
are the symbolic representations
of the two time series
S
and
R
, respectively, and
where the function
)(dist is implemented by using
the appropriate lookup table. It is proven that the
similarity measure in (3) produces no false
dismissals.
In (Muhammad Fuad, 2012b), (Muhammad
Fuad, 2012c), we showed that this assumption of
Gaussianity oversimplifies the problem and can
result in very large errors in time series mining
tasks, and we presented alternatives to SAX; one
which is based on the genetic algorithms (GASAX),
and another which is based on the differential
evolution (DESAX), to determine the locations of
the breakpoints. We showed that these two
optimized alternatives clearly outperform the
original SAX.
In (Muhammad Fuad, 2012d), we used
Particle
Swarm Optimization
(PSO), well-known
metaheuristics, to optimize SAX using a different
approach; to propose a new minimum distance
WMD that can better recover the information loss
resulting from SAX. The method we introduced,
(PSOWSAX), gives different weights to different
segments of the times series in the lower-
dimensional space. These weights are proportional
to the information contents of the different
segments. In (PSOWSAX) PSO is utilized to set
these weights.
□
A logical extension, which we present in this
work, of the above optimized alternatives to SAX is
one meta optimization process that can find optimal
locations of the breakpoints and optimal weights of
the segments corresponding to these breakpoints.
Such an optimization process can actually be
handled in two different ways; the first, which we
call
Two-Step OSAX constitutes of two steps, as the
name implies. In the first step the optimization
searches for the optimal locations of the breakpoints
assuming that all segments have the same weight
w
i
= 1
, and then in the next step another optimization
process sets optimal weights based on the optimal
locations of the breakpoints, which are the outcome
of step one. Since the weights are related to the
locations of the breakpoints, it is logical that step
one should start by optimizing the locations of the
breakpoints. The other way, which we call
One-Step
OSAX
uses one step to find the optimal locations of
the breakpoints and the weights corresponding to
those breakpoints.
We tended to think before conducting the
experiments that
Two-Step OSAX will give better
results than
One-Step OSAX since it seemed more
intuitive. We will see in the experimental section if
this intuition is founded.
One-SteporTwo-StepOptimizationandtheOverfittingPhenomenon-ACaseStudyonTimeSeriesClassification
647
3 EXPERIMENTS
We conducted the same experiments that we used to
validate (GESAX), (DESAX), and (PSOWSAX),
which are
1-NN classification task experiments. The
goal of classification, one of the main tasks of data
mining, is to assign an unknown object to one out of
a given number of classes, or categories (Last,
Kandel, and Bunke , 2004). In
k-NN each time
series is assigned a class label. Then a “leave one
out” prediction mechanism is applied to each time
series in turn; i.e. the class label of the chosen time
series is predicted to be the class label of its nearest
neighbor, defined based on the tested distance
function. If the prediction is correct, then it is a hit;
otherwise, it is a miss.
The classification error rate is defined as the ratio
of the number of misses to the total number of time
series (Chen and Ng, 2004).
1-NN is a special case
of
k-NN, where k=1.
We conducted experiments using datasets of
different sizes and dimensions available at UCR
(Keogh
et. al., 2011).
The values of the alphabet size we tested in the
experiments were 3, 10, and 20. We chose these
values because the first version of SAX used
alphabet size that varied between 3 and 10. Then in a
later version the alphabet size varied between 3 and
20. So these values are benchmark values.
As for the control parameters of DE that we
used, the population size
popsize was 12. The
differentiation constant F
r
was set to 0.9, and the
crossover constant C
r
was set to 0.5. The dimension
of the problem
nbp is breakpoints + weights in One-
Step OSAX
, and it is breakpoints and weights, in the
first step of
Two-Step OSAX and the second step of
Two-Step OSAX, respectively. As for the number of
generations NrGen, it is 100 for One-Step OSAX and
50 for each step of
Two-Step OSAX. Since the fitness
function is the same (the classification error) this
configuration guarantees that the complexities of
One-Step OSAX and that of Two-Step OSAX are
almost the same.
The training phase for
Two-Step OSAX is as
follows; for each value of the alphabet size, we run
the optimization process for 50 generations to get
the optimal locations of the breakpoints. This
corresponds to the first step of
Two-Step OSAX, then
we use these optimal locations of the breakpoints to
run the optimization process for 50 generations to
obtain the optimal weights. Later we use these
optimal weights and locations of the breakpoints on
the testing datasets to obtain the minimal
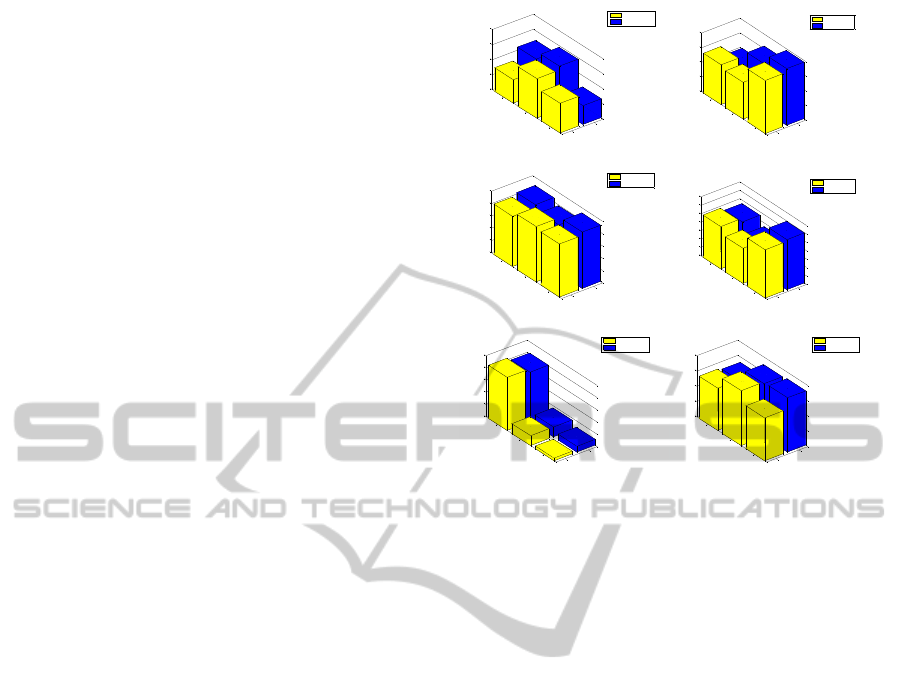
classification error (which we show in Figure 2 for
OneStepSA X
TwoStepSAX
3
10
20
0
0.05
0.1
0.15
0.2
DiatomSizeReduction
alphabet-size
Classification Error
OneStepSAX
TwoStepSAX
OneStepS AX
TwoStepSAX
3
10
20
0
0.05
0.1
0.15
0.2
FaceFour
alphabet-size
Classification Error
OneStepSAX
TwoStepSAX
OneStepSA X
TwoStepSAX
3
10
20
0
0.05
0.1
0.15
0.2
0.25
MoteStrain
alphabet-size
Classification Error
OneStepSAX
TwoStepSAX
OneStepS AX
TwoS te pS AX
3
10
20
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
SonyAIBORobotSurfaceII
alphabet-size
Classification Error
OneStepSAX
TwoStepSAX
OneStepSA X
TwoStepSAX
3
10
20
0
0.05
0.1
0.15
0.2
0.25
SyntheticControl
alphabet-size
Classification Error
OneStepSAX
TwoStepSAX
OneStepSA X
TwoStepSAX
3
10
20
0
0.1
0.2
0.3
0.4
TwoLeadECG
alphabet-size
Classification Error
OneStepSAX
TwoStepSAX
Figure 2: Comparison of the classification errors between
One-Step OSAX and Two-Step OSAX on different testing
datasets.
some of the different datasets that we tested in our
experiments). As for the experimental protocol for
One-Step OSAX, it is the same as that for Two-Step
OSAX
, except that we optimize in one step for the
locations of the breakpoints and for the weights, also
NrGen in the case is equal to 100.
The results shown in Figure 2 do not show, in
general, a difference in performance between
One-
Step OSAX
and Two-Step OSAX. We will discuss
these results more thoroughly in the next section.
4 DISCUSSION
At first glance the results we obtained in Section 3
suggest that there is no real difference between the
performance of
One-Step OSAX and that of Two-
Step OSAX
. We have to admit that these results were
a bit surprising to us as we expected, before
conducting the experiments, that
Two-Step OSAX
would give better results than those obtained by
applying
One-Step OSAX for reasons we mentioned
in Section 2. However, a deeper examination of the
results may yet reveal more surprising results.
If we remember from the experimental protocol
illustrated in the previous section, the two
optimization processes:
One-Step OSAX and Two-
Step OSAX
are applied to the training datasets to find
the optimal locations of the breakpoints and the
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
648

Table 1: Comparison of the classification errors between One-Step OSAX and Two-Step OSAX on the training datasets
presented in Figure 2.
Dataset Method
Classification Error
α
*
=3 α=10 α=20
DiatomSizeReduction
One-Step OSAX
0.062 0.062 0.062
Two-Step OSAX
0.687 0.125 0.062
FaceFour
One-Step OSAX
0.042 0.042 0.167
Two-Step OSAX
0.292 0.167 0.167
MoteStrain
One-Step OSAX
0.150 0.050 0.050
Two-Step OSAX
0.700 0.150 0.100
SonyAIBORobotSurfaceII
One-Step OSAX
0.148 0.111 0.074
Two-Step OSAX
0.444 0.185 0.148
synthetic_control
One-Step OSAX
0.170 0.003 0.000
Two-Step OSAX
0.833 0.020 0.003
TwoLeadECG
One-Step OSAX
0.130 0.087 0.043
Two-Step OSAX
0.652 0.260 0.087
α
*
is the alphabet size
optimal weights, and then these optimal values are
applied to the testing datasets, so the real
comparison between the efficiency of
One-Step
OSAX
and Two-Step OSAX, as optimization
processes, should in fact compare their performances
on the training datasets. Table 1 shows the
classification error; the fitness function in our
optimization problem, obtained by applying
One-
Step OSAX
and Two-Step OSAX to the datasets
presented in Figure 2. The results presented in Table
1 show that
One-Step OSAX clearly outperforms
Two-Step OSAX. These results raise two questions;
the first is why these results did not appear in Figure
2, which represents the final outcome of the whole
process, and the second question is why
One-Step
OSAX
outperformed Two-Step OSAX. As for the first
and the most interesting question which is why the
superior performance of
One-Step OSAX did not
show in the final results presented in Figure 2, the
reason for this is that the optimal solutions obtained
by
One-Step OSAX on the training datasets
overfitted the data; they were “too good” that when
they were used on the testing datasets the
performance dropped. This was not the case with
Two-Step OSAX. This interesting finding may
establish a new strategy to applying optimization in
data mining that “less optimal” solutions obtained by
applying the optimization algorithm to the training
datasets may finally turn out to be better than “more
optimal” solutions which may overfit the training
data.
As for the other question of why
One-Step OSAX
outperformed Two-Step OSAX, we believe the
reason for this could be that finally the locations of
the breakpoints play a more important role in the
optimization process than the weights, so in
One-
Step OSAX
the optimization process kept improving
the locations of the breakpoints until the final stages
of the optimization process while
Two-Step OSAX
interrupted this optimization after the first step.
5 CONCLUSIONS
In this paper we presented two approaches of an
optimization algorithm that handles a certain
problem of time series classification. These time
series are represented using a symbolic
representation method, SAX, of time series data.
Our optimized versions produce optimal versions, in
terms of classification task accuracy, of the original
SAX in that they spot optimal locations of the
breakpoints and optimal weights compared with the
original SAX. The first of the two approaches we
presented,
One-Step OSAX, consists of one step to
perform the optimization process, while the second
one,
Two-Step OSAX, applies the optimization
process in two steps. The experiments we conducted
show that
One-Step OSAX outperforms Two-Step
OSAX
. The interesting finding of our experiments is
that the superior performance of One-Step OSAX
was actually “hidden” because of the overfitting
phenomenon.
We believe the results we obtained shed new
light on the application of optimization algorithms,
mainly stochastic and bio-inspired ones, in data
mining, where the risk of overfitting is frequently
present. We think that an optimization algorithm,
applied to the training data, should avoid searching
for very close-to-optimal solutions, which highly fit
the training data and thus may not give optimal
One-SteporTwo-StepOptimizationandtheOverfittingPhenomenon-ACaseStudyonTimeSeriesClassification
649

solutions when deployed to testing data. A possible
strategy that we suggest is to terminate the
optimization process, on the training sets,
prematurely. However, the output of our
experiments applies to times series only, and to the
classification task in particular, so we do not have
enough evidence that our remarks are generalizable.
REFERENCES
Bramer, M., 2007. Principles of Data Mining,
Undergraduate Topics in Computer Science, Springer.
Chen, L., Ng, R., 2004. On the Marriage of Lp-Norm and
Edit Distance, In Proceedings of 30th International
Conference on Very Large Data Base, Toronto,
Canada, August, 2004.
Feoktistov, V., 2006. Differential Evolution: “In Search of
Solutions” (Springer Optimization and Its
Applications)”. Secaucus, NJ, USA: Springer- Verlag
New York, Inc..
Haupt, R.L., Haupt, S. E., 2004. Practical Genetic
Algorithms with CD-ROM. Wiley-Interscience.
Keogh, E., Chakrabarti, K., Pazzani, M., and Mehrotra ,
2000. Dimensionality reduction for fast similarity
search in large time series databases. J. of Know. and
Inform. Sys.
Keogh, E., Zhu, Q., Hu, B., Hao. Y., Xi, X., Wei, L. &
Ratanamahatana, C.A., 2011. The UCR Time Series
Classification/Clustering Homepage: www.cs.ucr.edu/
~eamonn/time_series_data/
Larose, D., 2005. Discovering Knowledge in Data: An
Introduction to Data Mining, Wiley, Hoboken, NJ.
Last, M., Kandel, A., and Bunke, H., editors. 2004. Data
Mining in Time Series Databases. World Scientific.
Lin, J., Keogh, E., Lonardi, S., Chiu, B. Y., 2003. A
symbolic representation of time series, with
implications for streaming algorithms. DMKD 2003:
2-11.
Mitchell, M., 1996. An Introduction to Genetic
Algorithms, MIT Press, Cambridge, MA.
Muhammad Fuad, M.M., 2012a. ABC-SG: A New
Artificial Bee Colony Algorithm-Based Distance of
Sequential Data Using Sigma Grams. The Tenth
Australasian Data Mining Conference - AusDM 2012,
Sydney, Australia, 5-7 December, 2012. Published in
the CRPIT Series-Volume 134, pp 85-92.
Muhammad Fuad, M.M. , 2012b. Differential Evolution
versus Genetic Algorithms: Towards Symbolic
Aggregate Approximation of Non-normalized Time
Series. Sixteenth International Database Engineering
& Applications Symposium– IDEAS’12 , Prague,
Czech Republic,8-10 August, 2012 . Published by
BytePress/ACM.
Muhammad Fuad, M.M. , 2012c. Genetic Algorithms-
Based Symbolic Aggregate Approximation. 14th
International Conference on Data Warehousing and
Knowledge Discovery - DaWaK 2012 – Vienna,
Austria, September 3 – 7.
Muhammad Fuad, M.M. , 2012d. Particle Swarm
Optimization of Information-Content Weighting of
Symbolic Aggregate Approximation. The 8th
International Conference on Advanced Data Mining
and Applications -ADMA2012, 15-18 December 2012,
Nanjing, China . Published by Springer-Verlag in
Lecture Notes in Computer Science/Lecture Notes in
Artificial Intelligence, Volume 7713, pp 443-455.
Yi, B. K., and Faloutsos, C., 2000. Fast time sequence
indexing for arbitrary Lp norms. Proceedings of the
26th International Conference on Very Large
Databases, Cairo, Egypt.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
650
