
Validation of a Cognitive Map
Definition of Quality Criteria to Detect Contradictions in a Cognitive Map
Aymeric Le Dorze, Laurent Garcia, David Genest and Stéphane Loiseau
Laboratoire d’Étude et de Recherche en Informatique d’Angers, Université d’Angers,
2 Boulevard Lavoisier, 49045, Angers Cedex 01, France
Keywords:
Cognitive Map, Validation, Quality Criterion, Verification, Test.
Abstract:
A cognitive map is a knowledge representation model. Knowledge is represented as a graph where nodes
represent concepts and arcs represent influences between these concepts. Each influence has a value that
quantifies it. Despite the fact that a cognitive map is quite simple to build, some influence values may contra-
dict each other. This paper provides some quality criteria in order to validate a cognitive map. There are two
kinds of quality criteria. The verification validates a cognitive map by computing its internal coherency. The
test validates a map from a set of constraints provided by the designer. These criteria indicate if a map does or
does not contain contradictions. We also propose a way to adapt these criteria according to the possible values
that an influence can take.
1 INTRODUCTION
Cognitive maps (Tolman, 1948) are popular models to
help people to make a decision. They provide an easy
visual communication medium for humans to perform
an analysis of a complex system. They have been used
in many fields, such as biology (Tolman, 1948), soci-
ology (Poignonec, 2006), ecology (Celik et al., 2005)
or politics (Levi and Tetlock, 1980). They are also
studied in the field of Artificial Intelligence (Well-
man, 1994), in order to improve the model. Cognitive
maps represent an influence network as a graph where
a concept labels a node with a text and an influence
labels an arc with an influence value that qualifies this
influence. This influence value belongs to a prede-
fined set called the value set which can be composed
of symbolic values, such as {+, −} (Axelrod, 1976),
{none, some, much,a lot} (Dickerson and Bart, 1994;
Zhou et al., 2003), or an interval of numeric values,
such as [−1, 1] (Kosko, 1986; Satur and Liu, 1999).
Thanks to these values, the global influence of any
concept of the map on any other one can be evaluated
by computing the propagated influence. To do so, we
compute, the propagated influence on each path be-
tween the two concepts by combining the values of
the influences. Then, we aggregate the propagated in-
fluences on every path between the two concepts.
A cognitive map is generally built by one designer
or by a group of designers during a brainstorming ses-
sion. It is often difficult for a designer to build a cog-
nitive map and to ensure its quality. Indeed, the com-
putation of the propagated influence of a concept on
an other one may sometimes give an ambiguous value
that represents a contradiction. With some value sets,
such a value does not exist. However, a concept may
still influence another concept in some way on one
path and in another way on a different path. A de-
signer may want to know if the map he is building
contains such contradictions. The validation of a cog-
nitive map helps to detect these contradictions.
There exist several kinks of works that study the
validation of knowledge bases. Most of these works
such as (Ginsberg, 1988) and (Dibie-Barthélemy
et al., 2001) define some properties, called quality cri-
teria, that the knowledge base system should respect
in order to preserve its quality and reliability. Vali-
dation is often split into two different areas: verifica-
tion and test (Ayel and Laurent, 1991). Verification is
based on a quality criterion that does not require exter-
nal information: it is based on the internal coherency
of the knowledge base only. Test is based on a qual-
ity criterion that requires external information, often
called constraints, integrity constraints, test case, or,
more generally, specification.
This paper proposes different kinds of quality cri-
teria in order to validate a cognitive map. To our
knowledge, no paper has been published on the sub-
ject. There exist some works (Christiansen, 2011) that
320
Le Dorze A., Garcia L., Genest D. and Loiseau S..
Validation of a Cognitive Map - Definition of Quality Criteria to Detect Contradictions in a Cognitive Map.
DOI: 10.5220/0004757103200327
In Proceedings of the 6th International Conference on Agents and Artificial Intelligence (ICAART-2014), pages 320-327
ISBN: 978-989-758-015-4
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)
tried to detect contradictions in a cognitive map, but
they were not formally defined and were not based
on the notion of quality criterion. The contradictions
detected by the quality criteria have two different pur-
poses. On the one hand, they tell the designers of a
map that this map contains an error that should be cor-
rected and which part of the map contains that error.
One the other hand, they provide to the potential users
of the map the parts of the map that are controversial.
These parts of the map might be typically discussed
in a brainstorming session.
In order to verify a cognitive map, this paper intro-
duces the non-ambiguity criterion. A cognitive map
is non-ambiguous if, for any pair of concepts of the
map, the propagated influence on every path between
the two concepts equals the propagated influence be-
tween the two concepts.
In order to test a cognitive map, this paper intro-
duces the coherency criterion. To test if a cognitive
map is coherent, a specification that the map has to
check is introduced. A specification is a set of con-
straints. A constraint is a triple made of a source
concept, a target concept and a value that represents
an expected influence value between the two con-
cepts. However, some constraints may be applicable
to many concepts at once and defining a constraint
for each pair of these concepts may be tedious. To
avoid such an operation, the idea is to use a taxonomy
of concepts that regroups some concepts into bigger
ones such that the most specific concepts of the tax-
onomy are the concepts of the cognitive map. Thus,
the concepts of the constraints belong to the taxon-
omy. Thanks to this taxonomy and the cognitive map,
we are able to compute the taxonomic influence be-
tween two concepts of the taxonomy according to the
propagated influences between the concepts that spe-
cializes these two concepts. The idea of the coherency
criterion is then to check if the taxonomic influence
between the two concepts of a constraint equals the
value provided by the same constraint.
In this article, we present in section 2 the classical
cognitive map model and how to compute the prop-
agated influence of a concept on another one for the
value set {+,−}. In section 3, we define some verifi-
cation criteria, including non-ambiguity. In section 4,
we define some test criteria, including coherency. We
also define the notions of specification and taxonomic
influence. To explain intuitively what represent these
quality criteria, first we limit ourselves to cognitive
maps defined on the value set {+, −} since this is the
simplest value set. Then, we show how to adapt these
criteria to other value sets in section 5 and especially
the value set [−1;1].
2 COGNITIVE MAPS
Cognitive maps are a knowledge representation
model that represents as a graph influences between
concepts. An influence is a causal relation between
two concepts labelled with a value. It expresses how
a concept influences another one regardless of the
other concepts. This value belongs to a predefined
set, called the value set.
Fog
+
--
Bad visibility
+
&&
Rain
+
11
+
--
Slippery road
+
//
Accident
Highway
−
--
Sinuous road
+
88
Secondary road
+
11
Figure 1: CM1, a cognitive map defined on the value set
{+, −}.
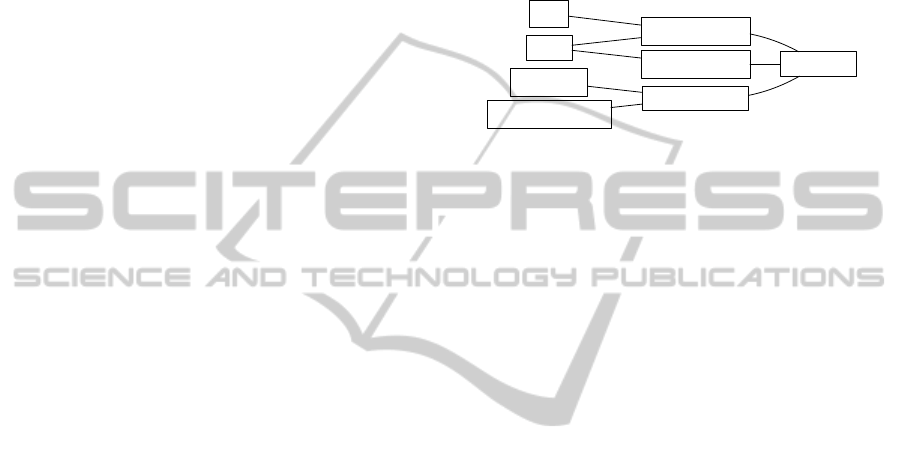
Example 1. The cognitive map shown on figure 1 rep-
resents influences between concepts tied to the road
traffic. This map is defined on the value set {+, −}. If
we consider the influence between Rain and Bad visi-
bility, it means that the fact that it rains positively in-
fluences the fact that the visibility is bad. On the con-
trary, if we consider the influence between Highway
and Sinuous road, the fact that we are on a highway
negatively influences the fact that the road is sinuous.
Thanks to the influence values, the global influ-
ence of a concept on another one can be computed.
For the moment, we focus only on the value set
{+, −} and we present thus the propagated influence
defined by R. Axelrod (Axelrod, 1976). It is com-
posed of three steps.
The first step is to list the different paths that link
the first concept to the second one. Since a cogni-
tive map may be cyclic, there is potentially an infinite
number of paths between the two concepts. There-
fore, the computation is limited to the most meaning-
ful paths only, which are the paths that does not con-
tain any cycle. We call such a path a minimal path.
The second step is to compute the influence value
that any of these minimal paths brings to the second
concept. This influence value is called the propagated
influence on a path and is denoted by I P . To do that,
we use the operator ∧ defined by Axelrod. This oper-
ator is close to a multiplication, but for the values +
and −. That means that the propagated influence on
a path is + if the number of negative influence values
on this path is even or − otherwise.
Finally, the third step is to aggregate the propa-
gated influences on every minimal path that links the
first concept to the second one with an average. To
do that, the propagated influence I is defined by Ax-
elrod with the operator ∨. If the propagated influence
ValidationofaCognitiveMap-DefinitionofQualityCriteriatoDetectContradictionsinaCognitiveMap
321

on every path is + (resp. −), then the propagated in-
fluence is also + (resp. −). If at least one path has
not the same value as the other paths, then the propa-
gated influence is ambiguous, denoted by the value ?.
If there is no path between the two concepts, then the
propagated influence is 0.
Example 2. In CM1, we want to compute the propa-
gated influence of Rain on Accident.
1. there are two minimal paths between Rain and
Accident: p
1
= {Rain → Bad visibility → Ac-
cident } and p
2
= {Rain → Slippery road →
Accident};
2. the propagated influences on p
1
and p
2
are:
I P (p
1
) = + ∧ + = + and I P (p
2
) = + ∧ + = +;
3. the propagated influence of Rain on Accident is
so: I (Rain, Accident) = I P (p
1
) ∨ I P (p
2
) = + ∨
+ = +.
We can conclude that the rain positively influences the
risk of an accident.
3 VERIFICATION
To verify a cognitive map, two quality criteria are pro-
posed. The first one, the cleanliness, can be seen as
a sub-case of the non-ambiguity and is presented in
section 3.1. The second one, the non-ambiguity, is
presented in section 3.2.
3.1 Cleanliness
For this criterion, we only consider the pairs of con-
cepts that are linked by a direct influence in a cog-
nitive map. A pair of concepts is said clean iff the
propagated influence of the first concept of the pair
on the second one equals the value labelling the in-
fluence between the two concepts. Such a criterion
means that a direct influence between two concepts is
supposed to represent the propagated influence of a
concept on the other one.
Atmospheric
pressure
−
..
+
//
Camping
Heat
+
22
Figure 2: An unclean pair of concepts.
Example 3. On the simple cognitive map of figure 2,
the atmospheric pressure is avoided by campers.
However, the atmospheric pressure generates heat,
and heat pleases campers.
Let us consider the pair of concepts
(Atmospheric pressure, Camping). We compute
I (Atmospheric pressure, Camping) = − ∨ (+ ∧ +) =
?. This value is different from the value of the
influence between Atmospheric pressure and Camp-
ing, which is −. Therefore, the pair of concepts
(Atmospheric pressure, Camping) is not clean.
More generally, a cognitive map is clean iff every
pair of concepts of the map linked by an influence is
clean.
Storm
+
//
+
))
Lightning
+
""
Atmospheric
pressure
−
))
+
Rain
−
//
−
Wildfire
Heat
+
//
Camping
+
<<
Figure 3: The cognitive map CM2.
Example 4. The cognitive map CM2 (figure 3) rep-
resents the influences of many concepts on the risk
that a wildfire occurs. On this map, the pair (Rain,
Wildfire) is clean. However, as already shown in ex-
ample 3, the pair (Atmospheric pressure, Camping)
is not clean. Therefore, the map CM2 is not clean.
Note that we cannot apply the cleanliness crite-
rion on the pair (Storm, Wildfire) as these concepts
are not directly linked by an influence. Therefore, this
pair is neither clean nor unclean.
3.2 Non-ambiguity
The cleanliness criterion only focuses on the concepts
that are directly linked by an influence. The non-
ambiguity criterion is based on the cleanliness but is
focused on any pair of concepts of the map.
A pair of concepts is said non-ambiguous iff the
propagated influence on every minimal path that links
the first concept of the pair to the second one equals
the propagated influence of the first concept on the
second one. Such a criterion means that this influence
must be in agreement with the propagated influence
regardless of how the first concept influences the sec-
ond one.
Lightning
+
,,
Storm
+
00
+
//
Wildfire
Rain
−
22
Figure 4: An ambiguous pair of concepts.
Example 5. On the simple cognitive map of figure 4,
on the one hand, a storm lights wildfires by generating
lightnings. On the other hand, a storm extinguishes
wildfires by triggering rain.
Let us consider the pair of concepts (Storm,
Wildfire). We compute:
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
322
I P (Storm → Lightning → Wildfire) = +
I P (Storm → Rain → Wildfire) = −
This gives us a propagated influence of
I (Storm, Wildfire) = ?. Since this value is dif-
ferent from the propagated influences on the two
paths linking the two concepts, we conclude that the
pair of concepts (Storm, Wildfire) is ambiguous.
Given these definitions of the cleanliness and the
non-ambiguity criteria, it is easy to show that any non-
ambiguous pair of concepts linked by an influence is
also clean. More generally, a cognitive map is non-
ambiguous iff every pair of concepts of the map is
non-ambiguous. It is also easy to show that a non-
ambiguous cognitive map is also clean.
Example 6. On the map CM2 (figure 3), we have
already shown in example 5 that the pair (Storm,
Wildfire) is ambiguous. Moreover, as we already
know that the pair (Atmospheric pressure, Camping)
is unclean, we can conclude that it is also ambiguous.
Therefore, the map CM2 is ambiguous.
4 TEST
A test criterion needs external information to validate
a model. In our case, this external information is a
set of constraints called a specification. A constraint
is an expected influence value between two concepts.
We explain what is a specification and a constraint in
section 4.1. Then, we define two test criteria. First,
in section 4.2, the coherency checks that the influence
value computed in the map equals the value specified
by the constraint. Then, in section 4.3, the compati-
bility adds some flexibility to the coherency criterion.
4.1 Specification
A constraint is a triple made of two concepts and one
value. A constraint expresses an expected influence
value between two concepts. Thus, the first concept
of the constraint is the cause of the influence and the
second one is the effect. We use a taxonomy to ex-
press constraints applicable to many concepts. A tax-
onomy of concepts associates as set of concepts to a
simple inheritance partial order <. Thus, a taxonomy
can be represented as a set of rooted trees.
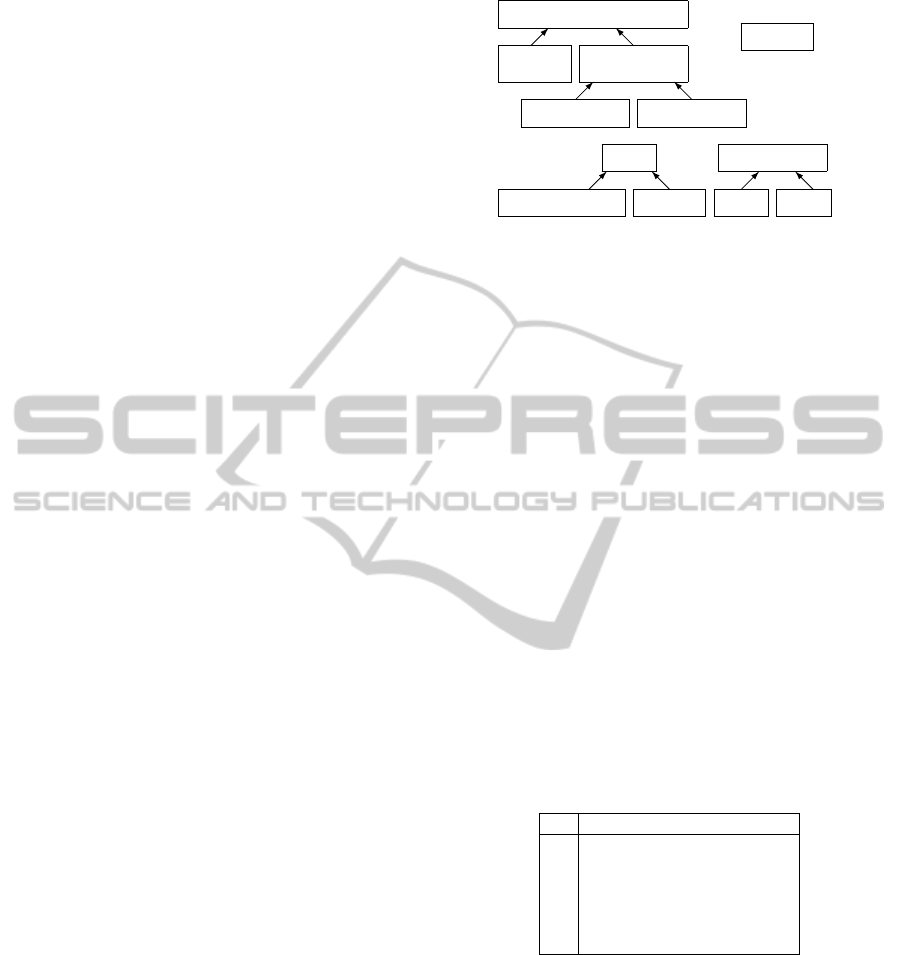
Example 7. The taxonomy of concepts T1 (figure 5)
orders some concepts.
With the ontological cognitive map model (Chau-
vin et al., 2009), a cognitive map is associated to an
ontology in order to compute the ontological influ-
ence between two concepts. As this notion of ontol-
ogy is equivalent to our notion of taxonomy, we reuse
Bad traffic condition
Bad
visibility
Road in
bad shape
Slippery road Sinuous road
Road
Secondary road Highway
Bad weather
Rain
Fog
Accident
Figure 5: A taxonomy of concepts T1.
the ontological influence to define our taxonomic in-
fluence. To do so, the concepts of the map need to be
the least concepts of the taxonomy. Thus, each con-
cept of the taxonomy represents one or many concepts
of the map. We call the set of concepts that a concept
of the taxonomy represents its elementary concepts.
Example 8. The taxonomy T1 (example 7) gener-
alises the concepts of the cognitive map CM1 (exam-
ple 1). Thus, the concepts of CM1 are the least con-
cepts of T1. We can associate T1 to CM1 in order to
compute a taxonomic influence. The elementary con-
cepts of Bad traffic condition are Bad visibility, Sinu-
ous road and Slippery road. The elementary concept
of Rain is just Rain itself.
The taxonomic influence I
T
between two concepts
is computed by aggregating the propagated influences
between every pair made of an elementary concept of
the first concept and an elementary concept of the sec-
ond one. To aggregate these propagated influences,
we use the operator presented in figure 6. The value
⊕ means "positive or null". The value means "neg-
ative or null".
+ ⊕ 0 − ?
+ + ⊕ ⊕ ? ? ?
⊕ ⊕ ⊕ ⊕ ? ? ?
0 ⊕ ⊕ 0 ?
? ? ?
− ? ? − ?
? ? ? ? ? ? ?
Figure 6: The operator.
Example 9. We consider the concepts Bad weather
and Bad traffic condition of T1. The taxonomic in-
fluence of Bad weather on Bad traffic condition rela-
tively to CM1 is:
I
T
(Bad weather, Bad traffic condition) =
I (Fog, Bad visibility)
I (Fog, Slippery road)
I (Fog, Sinuous road)
I (Rain, Bad visibility)
I (Rain, Slippery road)
I (Rain, Sinuous road)
=
+
0
0
+
+
0
= ⊕
ValidationofaCognitiveMap-DefinitionofQualityCriteriatoDetectContradictionsinaCognitiveMap
323
The idea of the constraint is to verify that the tax-
onomic influence between the concepts of the con-
straint is in agreement with the value of the constraint.
Thus, this value must belong to {+, ⊕, 0, , −, ?}.
A specification of constraints is a set of constraints
defined on a taxonomy such that the concepts of any
constraint belongs to the taxonomy.
Example 10. Let us consider the following three con-
straints:
s
1
= hBad traffic condition, Accident, +i
s
2
= hBad weather, Bad traffic condition, +i
s
3
= hRoad, Sinuous road, −i
Their concepts all belong to T1 and their values
to {+, ⊕, 0, , −, ?}. Thus, we can build the specifi-
cations S
1
= {s
1
}, S
2
= {s
1
, s
2
} and S
3
= {s
1
, s
2
, s
3
}.
4.2 Coherency
A cognitive map is coherent with a constraint accord-
ing to a taxonomy iff the taxonomic influence between
the two concepts of the constraint equals the value of
the constraint.
Example 11. We test the coherency of CM1 with the
constraints from example 10 according to T1.
CM1 is coherent with s
1
= hBad traffic condi-
tion, Accident, +i according to T1. Indeed,
I
T
(Bad traffic condition, Accident) = + and + is the
value of s
1
.
However, CM1 is not coherent with s
2
= hBad
weather, Bad traffic condition, +i according to T1 be-
cause I
T
(Bad weather, Bad traffic condition) = ⊕ 6=
+.
CM1 is not coherent with s
3
= hRoad, Sinu-
ous road, −i according to T1 either because
I
T
(Road, Sinuous road) = ? 6= −.
More generally, a cognitive map is coherent with a
specification according to a taxonomy if it is coherent
with every constraint of the specification according to
this taxonomy.
Example 12. We consider the specifications of the ex-
ample 10.
CM1 is coherent with S
1
= {s
1
} according to T1 be-
cause CM1 is coherent with s
1
according to T1.
However, CM1 is not coherent with either S
2
=
{s
1
, s
2
} nor S
3
= {s
1
, s
2
, s
3
} according to T1 because
CM1 is not coherent with s
2
according to T1.
4.3 Compatibility
The coherency criterion is based on a strict equality
between two values. The equality may be too strict
for some designers. Indeed, if we consider the con-
straint s
2
from the example 11, the computed taxo-
nomic influence is ⊕ whereas the value in the con-
straint is +. Hence, the coherency criterion is not
validated. However, as ⊕ means "positive or null",
one could consider that this value is globally positive.
Therefore, since the expected value is positive, one
could argue that the criterion should be validated. To
do so, we need to extend the coherency criterion by
adding some flexibility to it.
That is why we define the compatibility criterion.
The idea is to replace the equality by a more flexible
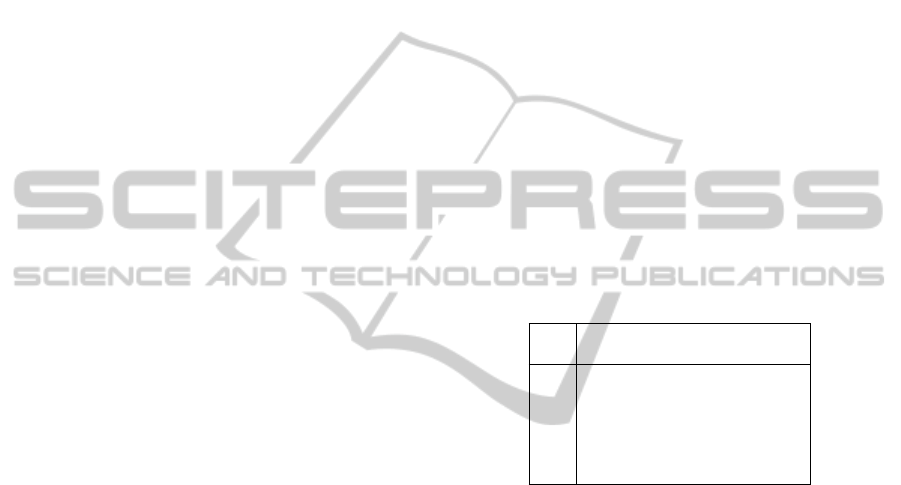
relation between two values. We define the notion of
compatible values. The idea is to list, for any value of
{+, ⊕, 0, , −, ?}, the set of values that are close to it.
Each value is trivially compatible with itself. We
consider also that each value is compatible with the
values that are really close to it. This means that +
is compatible with ⊕, ⊕ is compatible with + and 0,
0 is compatible with ⊕ and and so on. . . However,
the only value compatible with ? is itself. Note that
? is compatible with 0 as ? represents a mix of pos-
itive and negative values, and thus includes 0. This
notion is represented on figure 7 where a value α
1
is
compatible with another value α
2
iff α
1
J α
2
.
J
α
2
+ ⊕ 0 − ?
α
1
+ X X × × × ×
⊕ X X X × × ×
0 × X X X × ×
× × X X X ×
− × × × X X ×
? × × X × × X
Figure 7: Compatible values.
We define now the compatibility criterion. A cog-
nitive map is compatible with a constraint according
to a taxonomy iff the taxonomic influence between the
two concepts of the constraint is compatible with the
value of this constraint.
Example 13. We test the compatibility of CM1 with
the constraints from example 10 according to T1.
CM1 is compatible with s
1
= hBad traffic con-
dition, Accident, +i according to T1 because
I
T
(Bad traffic condition, Accident) = + J +.
CM1 is now compatible with s
2
= hBad weather,
Bad traffic condition, +i according to T1 because
I
T
(Bad weather, Bad traffic condition) = ⊕ J +.
However, CM1 is still not compatible with s
3
=
hRoad, Sinuous road, −i according to T1 because
I
T
(Road, Sinuous road) = ? 6J −.
Like the coherency criterion, more generally, a
cognitive map is compatible with a specification ac-
cording to a taxonomy if it is compatible with every
constraint of the specification according to this taxon-
omy.
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
324

Example 14. We consider the specifications of the ex-
ample 10.
CM1 is now compatible with S
1
= {s
1
} and S
2
=
{s
1
, s
2
} according to T1 because CM1 is compatible
with s
1
and s
2
according to T1.
However, CM1 is still not compatible with S
3
=
{s
1
, s
2
, s
3
} according to T1 because CM1 is still not
compatible with s
3
according to T1.
5 SETTINGS
The quality criteria previously defined are only ap-
plicable to cognitive maps defined on {+, −}. As
explained earlier, a cognitive map can be defined on
other value sets, such as [−1;1] or {none < few <
much < a lot}. Every quality criterion except the
compatibility checks the equality of two values. Thus,
technically, they can be applied to a cognitive map de-
fined on any other value set than {+, −}. However, as
already explained in the previous section, sometimes
an equality may be too strict for a designer. The no-
tion of compatible values is defined to add some flex-
ibility to the coherency criterion. Therefore, the idea
is to redefine the notion of compatible values for these
other value sets and thus to define new quality criteria
that add some flexibility to the already existing crite-
ria, using the notion of compatible values.
Note that we will not redefine the coherency crite-
rion for numeric values as the idea of this criterion is
to check that two values are strictly equal. Moreover,
adding flexibility to this criterion leads to redefine the
compatibility criterion.
In this section, we propose a method to adapt our
criteria to the value set [−1;1]. We define first how
to compute the propagated influence associated to the
value set [−1;1] in section 5.1. We define then how to
adapt first the cleanliness and the non-ambiguity cri-
teria in section 5.2 and second the compatibility cri-
terion in section 5.3. Finally, we explain briefly how
to adapt these criteria to the value set {none < few <
much < a lot} in section 5.4.
5.1 Propagated Influence for [−1; 1]
We present in this section the propagated influence
defined in (Chauvin et al., 2009) for the value set
[−1;1]. The idea for the computation is very simi-
lar to the one for {+, −}. The only change is how the
values are aggregated. The propagated influence on
a minimal path is defined as the multiplication of the
values of the influences that compose this path. Then,
the propagated influence of a concept on another one
is defined as the average of the propagated influences
on the minimal paths between the two concepts.
Fog
0.9
--
Bad visibility
0.7
&&
Rain
0.5
11
0.2
--
Slippery road
0.8
//
Accident
Highway
−0.9
--
Sinuous road
0.2
88
Secondary road
0.7
11
Figure 8: CM1b, a cognitive map defined on the value set
[−1;1].
Example 15. The cognitive map CM1b (figure 8) is
the cognitive map CM1 (example 1) defined on the
value set [−1;1]. This value set allows to be more
expressive on the influence values.
The propagated influence of Rain on Accident is
this time I (Rain, Accident) =
0.5×0.7+0.2×0.8
2
= 0.255.
5.2 Cleanliness and Non-ambiguity for
[−1;1]
To adapt our criteria for the value set [−1;1], we need
to redefine the notion of compatible values. The idea
is to use a threshold that specifies a granted margin
of error. This positive numeric value is used to define
an interval around a specific value to specify which
values are granted. Therefore, we define a tolerance
threshold: the higher the threshold, the higher the
number of granted values. If the threshold is 0, we
find back a strict equality. Thus, a value is said com-
patible according to a threshold with an other one iff
their absolute difference is lesser than or equal to this
threshold.
Thanks to the notion of compatible values accord-
ing to a threshold, we are able to define new quality
criteria that add flexibility to the old ones. To do that,
we simply replace the relation of equality in the old
criteria by the notion of compatible values according
to a threshold in the new ones.
We say that a pair of concepts is clean according
to a threshold if the propagated influence of the first
concept of the pair on the second is compatible with
the value labelling the influence between the two con-
cepts, according to this threshold. We say also that
a pair of concepts is non-ambiguous according to a
threshold if the propagated influence on every mini-
mal path that links the first concept of the pair to the
second one is compatible with the propagated influ-
ence of the first concept on the second one, according
to this threshold. With these definitions, we define
trivially what is a clean cognitive map according to
a threshold and a non-ambiguous cognitive map ac-
cording to a threshold. Note that the cleanliness is
still a sub-case of the non-ambiguity.
ValidationofaCognitiveMap-DefinitionofQualityCriteriatoDetectContradictionsinaCognitiveMap
325

Storm
0.9
//
0.8
))
Lightning
0.2
""
Atmospheric
pressure
−0.1
))
0.3
Rain
−0.7
//
−0.4
Wildfire
Heat
0.6
//
Camping
0.2
<<
Figure 9: The cognitive map CM2b, defined on the value
value set [−1;1].
Example 16. We consider the cognitive map
CM2b (figure 9). This map is a more expressive ver-
sion of CM2 (example 6) defined on the value set
[−1;1].
We consider a threshold of 0.3. The pair (Rain,
Wildfire) is unclean according to this threshold.
Indeed, I (Rain, Wildfire) = −0.39 and |−0.39 −
(−0.7)| = 0.31, which is greater than 0.3.
Note that this time, the pair (Atmospheric pres-
sure, Camping) is clean according to this thresh-
old. Indeed, I (Atmospheric pressure, Camping) =
|0.04 − (−0.1)| = 0.14 and 0.14 ≤ 0.3. How-
ever, in example 4, (Rain, Wildfire) was clean and
(Atmospheric pressure, Camping) was unclean. This
is due to the fact that in example 4, two opposite
values (+ and −) necessarily invalidate the criterion
whereas with these criteria, only the gap between two
values matters.
With a threshold of 0.3, the pair (Storm,
Wildfire) is ambiguous according to this thresh-
old. Indeed, I P (Storm → Rain → Wildfire) =
−0.56, I (Storm, Wildfire) = −0.148 and |−0.56 −
(−0.148)| = 0.412 > 0.3.
5.3 Compatibility for [−1;1]
Now, we would like the compatibility criterion for the
value set [−1; 1]. Before defining this criterion, we
need first to define the taxonomic influence for the
value set [−1; 1]. Again, we base ourselves on the def-
inition of the ontological influence for [−1;1] (Chau-
vin et al., 2009). To compute this influence, we need
first to compute the propagated influences between
every pair made of an elementary concept of the first
concept and an elementary concept of the second one.
The taxonomic influence is then defined as an inter-
val between the minimal and the maximal propagated
influences.
Example 17. We consider the concepts Bad weather
and Bad traffic condition of T1 (example 7). The tax-
onomic influence of Bad weather on Bad traffic con-
dition relatively to CM1b (example 15) is:
I (Fog, Bad visibility) = 0.9 I (Rain, Bad visibility) = 0.5
I (Fog, Slippery road) = 0 I (Rain, Slippery road) = 0.2
I (Fog, Sinuous road) = 0 I (Rain, Sinuous road) = 0
I
T
(Bad weather, Bad traffic condition) = [0; 0.9]
Given this definition of the taxonomic influence,
we cannot use the threshold method for the compati-
bility criterion. Indeed, this criterion compares a tax-
onomic influence to a specified value. The value of a
taxonomic influence is an interval, which is not a nu-
meric value. Therefore, the threshold method cannot
work with such values as it only works with numeric
values.
We have thus to define the notion of compatible
intervals. To do so, we distinguish the interval that
represents the taxonomic influence and the interval
that represents the value of the constraint. We con-
sider that the interval of the constraint describes all
the values accepted for the taxonomic influence to
validate the said constraint. The interval of the taxo-
nomic influence describes the possible values for this
influence. Thus, we say that the interval of the taxo-
nomic influence and the interval of the constraint are
compatible iff the interval of the taxonomic influence
is included into the interval of the constraint. There-
fore, a cognitive map is compatible with a constraint
according to a taxonomy iff the taxonomic influence
between the two concepts of the constraint is included
into the value of the constraint.
Given the notion of compatibility with a constraint
for the value set [−1; 1], the definition of the compat-
ibility with a specification for [−1;1] is trivial.
Example 18. We test the compatibility of CM1b (ex-
ample 15) according to T1 (example 7). We define the
3 following constraints, based on the ones from the
example 10, defined on the taxonomy T1:
s
0
1
= hBad traffic condition, Accident, [0; 1]i
s
0
2
= hBad weather, Bad traffic condition, [0.5; 1]i
s
0
3
= hRoad, Sinuous road, [−1; −0.5]i
The constraint s
0
1
means that a positive influence is
expected. The constraint s
0
2
means that a strong pos-
itive influence is expected. The constraint s
0
3
means
that a strong negative influence is expected.
CM1b is compatible with s
0
1
according to T1 be-
cause I
T
(Bad traffic condition, Accident) = [0.2;0.8]
and [0.2;0.8] ⊆ [0; 1].
However, CM1b is not compati-
ble with s
0
2
according to T1 because
I
T
(Bad weather, Bad traffic condition) = [0;0.9]
and [0;0.9] 6⊆ [0.5; 1].
CM1b is not compatible with s
0
3
according to T1
either because I
T
(Road, Sinuous road) = [−0.9; 0.7]
and [−0.9;0.7] 6⊆ [−1; −0.5].
ICAART2014-InternationalConferenceonAgentsandArtificialIntelligence
326

5.4 Quality Criteria for
{none < few < much < a lot}
The value set {none < few < much < a lot} is a to-
tally ordered set of values. With such a value set, the
propagated influence on a path is usually defined as a
min and the propagated influence as a max. Since this
value set contains very few values, the notion of com-
patible values may not be as useful for this value set
as for the value set [−1; 1]. However, we can still list
the values that are compatible with a specific value,
as we did for the set {+, ⊕, 0, , −, ?}. One easy way
to do this is to use the total order between the values.
This order can indeed by used to define a distance be-
tween the values. We can then use again a threshold
such that, if the distance between two values is lesser
than or equal to this threshold, then these two values
are compatible according to this threshold.
6 CONCLUSIONS
We have presented a way to validate cognitive maps
by introducing four different kinds of quality criteria
for cognitive maps defined on the value set {+, −}.
We have so introduced two kinds of verification cri-
teria, the cleanliness and the non-ambiguity and two
kinds of test criteria, the coherency and the compat-
ibility. We have also proposed a way to adapt these
criteria to other value sets such as [−1; 1].
We have tested our criteria on cognitive maps rel-
ative to fishing (Christiansen, 2011). Our criteria de-
tect the contradictions spotted by the authors as well
as others contradictions that may be interesting to
study. To do so, we developed a software that im-
plements the quality criteria in order to automatically
validate a cognitive map (Le Dorze, 2013).
As for now, our approach can only inform a de-
signer that its map does or does not validate a specific
quality criterion. It does not tell the user where are
the contradictions spotted by the criterion and how to
correct them. Our current research are leading on this
point.
REFERENCES
Axelrod, R. M. (1976). Structure of decision: the cognitive
maps of political elites. Princeton, NJ, USA.
Ayel, M. and Laurent, J.-P. (1991). Validation, verification
and test of knowledge-based systems. John Wiley &
Sons, Inc., New York, NY, USA.
Celik, F. D., Ozesmi, U., and Akdogan, A. (2005). Par-
ticipatory Ecosystem Management Planning at Tu-
zla Lake (Turkey) Using Fuzzy Cognitive Mapping.
eprint arXiv:q-bio/0510015.
Chauvin, L., Genest, D., and Loiseau, S. (2009). Ontologi-
cal Cognitive Map. International Journal on Artificial
Intelligence Tools, 18(5):697–716.
Christiansen, G. (2011). Modélisation du savoir portée par
les acteurs d’un système : application aux pêcheurs à
la coquille en rade de Brest. Master’s thesis, Agro-
campus Ouest, Saint-Brieuc, France.
Dibie-Barthélemy, J., Haemmerlé, O., and Loiseau, S.
(2001). Refinement of Conceptual Graphs. In Del-
ugach, H. S. and Stumme, G., editors, ICCS 2001,
volume 2120 of Lecture Notes in Computer Science,
pages 216–230. Springer.
Dickerson, J. A. and Bart, K. (1994). Virtual Worlds as
Fuzzy Cognitive Maps. Presence, 3(2):73–89.
Ginsberg, A. (1988). Knowledge-Base Reduction: A New
Approach to Checking knowledge Bases for Inconsis-
tency and Redundancy. In Shrobe, H. E., Mitchell,
T. M., and Smith, R. G., editors, AAAI 1988, pages
585–589. AAAI Press / The MIT Press.
Kosko, B. (1986). Fuzzy cognitive maps. International
Journal of Man-Machines Studies, 24:65–75.
Le Dorze, A. (2013). Validation, synthèse et paramétrage
des cartes cognitives. PhD thesis, LERIA, Université
d’Angers, France.
Levi, A. and Tetlock, P. E. (1980). A Cognitive Analysis of
Japan’s 1941 Decision for War. The Journal of Con-
flict Resolution, 24(2):195–211.
Poignonec, D. (2006). Apport de la combinaison cartogra-
phie cognitive/ontologie dans la compréhension de la
perception du fonctionnement d’un écosystème récifo-
lagonaire de Nouvelle-Calédonie par les acteurs lo-
caux. PhD thesis, ENSA Rennes, France.
Satur, R. and Liu, Z.-Q. (1999). A Contextual Fuzzy Cogni-
tive Map Framework for Geographic Information Sys-
tems. IEEE Transactions on Fuzzy Systems, 7(5):481–
494.
Tolman, E. C. (1948). Cognitive maps in rats and men. The
Psychological Review, 55(4):189–208.
Wellman, M. P. (1994). Inference in cognitive maps. Math-
ematics and Computers in Simulation, 36(2):137–148.
Zhou, S., Zhang, J. Y., and Liu, Z.-Q. (2003). Quotient
FCMs – A Decomposition Theory for Fuzzy Cog-
nitive Maps. IEEE Transactions on Fuzzy Systems,
11(5):593–604.
ValidationofaCognitiveMap-DefinitionofQualityCriteriatoDetectContradictionsinaCognitiveMap
327
