
Fast Optimum-Path Forest Classification on Graphics Processors
Marcos V. T. Romero
1
, Adriana S. Iwashita
1
, Luciene P. Papa
2
, Andr´e N. Souza
3
and Jo˜ao P. Papa
1
1
Department of Computing, S˜ao Paulo State University, Bauru, S˜ao Paulo, Brazil
2
Southwest Paulista College, Avar´e, S˜ao Paulo, Brazil
3
Department of Electrical Engineering, S˜ao Paulo State University, Bauru, S˜ao Paulo, Brazil
Keywords:
Optimum-Path Forest, Graphics Processing Unit.
Abstract:
Some pattern recognition techniques may present a high computational cost for learning samples’ behaviour.
The Optimum-Path Forest (OPF) classifier has been recently developed in order to overcome such drawbacks.
Although it can achieve faster training steps when compared to some state-of-art techniques, OPF can be
slower for testing in some situations. Therefore, we propose in this paper an implementation in graphics cards
of the OPF classification, which showed to be more efficient than traditional OPF with similar accuracies.
1 INTRODUCTION
Pattern recognition techniques have as main goal to
classify a dataset based on a previous learning over
some predefined samples, which are described by
a set of features extracted from an observation set,
defining points on a multidimensional space. De-
pending on the information we have about the dataset,
we can face unsupervised and supervised techniques,
where a fully labeled dataset can enhance the effec-
tiveness of such approaches (Duda et al., 2000).
Supervised learning approaches allow the classi-
fier to learn the behaviour of the dataset from a train-
ing set, and then evaluate this learning applying the
knowledge over an unseen test set. Recently, a graph-
based framework for supervised pattern recognition
techniques was proposed by Papa et al. (Papa et al.,
2009; Papa et al., 2012). The Optimum-Path Forest
(OPF) classifier models pattern recognition as an opti-
mum graph partition problem, in which a competition
process among some samples generates a collection
of optimum-path trees (OPTs) rooted at them. Each
class can be represented by just one or several OPTs,
which encode the power of connectivitybetween sam-
ples.
Even though OPF has obtained results compara-
ble to the ones given by some state-of-the-art pat-
tern recognition techniques, such as Support Vector
Machines (SVM) and Neural Networks (NN), being
also faster than them for training, the OPF classifica-
tion has a considerable computational burden. While
SVM testing phase uses only the support vectors com-
puted in the training phase, and for NN we need only
the neurons’ weights, in regard to OPF it is required
to compute the distance for all training set to classify
just one test sample. Although Papa et al. (Papa et al.,
2012) have proposed an optimization of this step, the
OPF test phase may be still time consuming.
Aiming to achieve even faster classification
phases, some works have presented implementations
of pattern recognition techniques in CUDA (Compute
Unified Device Architecture) environment, which
makes use of the high number of cores embedded
on the Graphic Processing Unit (GPU) of some re-
cent graphics cads. Catanzaro et al. (Catanzaro et al.,
2008), for instance, proposed a GPU-based imple-
mentation of SVM which is around 9 −−35× faster
than traditional implementation on CPU (Central Pro-
cessing Unit). Oh and Jung (Oh and Jung, 2004) have
introduced neural networks in the context of GPU-
based programming.
Further, Jang et al. (Jang et al., 2008) proposed
a NN implementation combining CUDA e OpenMP
(Open Multi-Processing). In this work, the authors
argued about the massive parallel programming in
GPUs, in which we need to take care about the gran-
ularity of the problem. Therefore, the amount of
source code which can be parallelized must counter-
balance the system’s throughput. Recently, Gainaru
et al. (Gainaru et al., 2011) presented a study about
some data mining algorithms implemented on GPU
devices.
In this work, we present a CUDA-based OPF test-
ing phase, as well as some experiments which shown
627
V. T. Romero M., S. Iwashita A., P. Papa L., N. Souza A. and P. Papa J..
Fast Optimum-Path Forest Classification on Graphics Processors.
DOI: 10.5220/0004740406270631
In Proceedings of the 9th International Conference on Computer Vision Theory and Applications (VISAPP-2014), pages 627-631
ISBN: 978-989-758-004-8
Copyright
c
2014 SCITEPRESS (Science and Technology Publications, Lda.)

the gain on efficiency keeping similar recognition
rates when compared with traditional OPF. As far as
we know, this is the first proposal of one GPU-based
implementation of OPF up to date. The remainder of
this paper is organized as follows. Section 2 and 3
present OPF background and the approach approach
to boost OPF testing step. Section 4 discusses the ex-
perimental results and Section 5 states conclusions.
2 OPTIMUM-PATH FOREST
Let X and Y be a set of samples and their correspond-
ing labels, respectively, where Y ⊆ M , being M the
set of all possible labels. Given a labeled dataset
D = (X , Y ) , the idea behind OPF is to model D as
a graph G = (V , A) whose nodes are the samples in
V = X , and the arcs are defined by an adjacency re-
lation A between nodes in the feature space. The arcs
are weighted by a distance function between the fea-
ture vectors of the corresponding nodes.
As a community ordered formation process,
where groups of individuals are obtained based on
optimum connectivity relations to their leaders, OPF
employs a competition process among some key
nodes (prototypes) in order to partition the graph into
an optimum-path forest according to some path-cost
function. By analogy, the population is divided into
communities, where each individual belongs to the
group which offered to it the highest reward. In ad-
dition, the dataset D is divided in two subsets D =
D
1
∪D
2
, standing for the training and test sets, re-
spectively. Now, we have the following graphs: G
1
=
(V
1
, A
1
) and G
2
= (V
2
, A
2
), V
1
∪V
2
= X , which
model D
1
and D
2
, respectively.
Now assume π
s
be a path in the graph with termi-
nus at sample s ∈ D
1
, and hπ
s
·(s, t)i a concatenation
between π
s
and the arc (s, t). Let S ⊂ D
1
be a set
of prototypes from all classes. Roughly speaking, the
main idea of the Optimum-Path Forest algorithm is to
minimize a cost map O(t) = min
∀t∈V
1
{Ψ(π
t
)}, where
Ψ is a path-cost function defined as:
Ψ(hsi) =
0 if s ∈S
+∞ otherwise,
Ψ(π
s
·hs, ti) = max{Ψ(π
s
), d(s, t)}, (1)
in which d(s, t) stands for the distance between nodes
s and t.
Particularly, an optimalset of prototypes S
∗
can be
found by exploiting the theoretical relation between
the minimum-spanning tree (MST) (Cormen et al.,
2001) and optimum-path tree for Ψ (All`ene et al.,
2007). By computing a MST in the complete graph
G
1
, we obtain a connected acyclic graph whose nodes
are all samples in V
1
. This spanning tree is optimum
in the sense that the sum of its arc weights is mini-
mum as compared to any other spanning tree in the
complete graph. In addition, every pair of samples
is connected by a single path, which is optimum ac-
cording to Ψ. Therefore, the optimum prototypes are
defined as the nodes from distinct classes that share
an arc in the MST.
In the classification phase, for any sample t ∈ V
2
,
we consider all arcs connectingt with samples s ∈V
1
,
as though t were part of the graph. Considering all
possible paths from S
∗
to t, we find the optimum path
P
∗
(t) from S
∗
and label t with the class λ(R (t)) of
its most strongly connected prototype R (t) ∈ S
∗
, be-
ing λ(·) a function that returns the true label of some
sample. This path can be identified by evaluating the
optimum cost O(t) as:
O(t) = min{max{O(s), d(s, t)}}, ∀s ∈ V
1
. (2)
Suppose the node s
∗
∈ G
1
is the one which satis-
fies (Equation 2). Given that label θ(s
∗
) = λ(R (t)),
the classification simply assigns θ(s
∗
) as the class of
t. Clearly, an error occurs when θ(s
∗
) 6= λ(t), where
θ(·) stands for the predicted label for some sample.
3 PROPOSED ARCHITECTURE
FOR GPU-BASED OPF
In this section, we present the GPU-based implemen-
tation for OPF testing phase, as well as some defi-
nitions employed in this work, which have been also
proposed to fulfill the development of the parallel ver-
sion of OPF.
3.1 Matrix Association
Let T be a matrix association operation between two
matrices A and B with dimensions n
1
×m and m×n
2
,
respectively. As a result of T, we can obtain a matrix
C with dimensions n
1
×n
2
, as follows:
C = T(A, B, f(x, y)), (3)
in which f(x, y) stands for a generic function, being
each element c
ij
from C defined as
c
ij
=
m
∑
k=1
f(a
ik
, b
kj
), (4)
where a
ik
and b
kj
stand for elements from A and B,
respectively.
In order to make it clear, a matrix multiplication,
for instance, can be written as C = T(A, B, f(x, y)),
where f(x, y) is defined as follows:
f(x, y) = x∗y. (5)
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
628

3.2 Parallel OPF Classification on GPU
Devices
The main performance issue of the OPF testing phase
concerns with the distance calculation between all
training nodes and the testing sample. Such process is
used to find the lowest path-cost given by some train-
ing node. Therefore, we propose here to parallelize
two steps of the OPF testing phase : (i) distance cal-
culation between training and testing nodes, and (ii)
finding the lowest path-cost given by some training
node to each testing sample.
In regard to the former step, suppose the testing set
can be modeled by a matrix M
1
with dimensions n
1
×
n
f
, in which n
1
and n
f
stand for the testing set size
and the number of features, respectively. Thus, each
rowi of M
1
represents the features from testing node i.
Similarly, the training set is then modeled by a matrix
M
2
with dimensions n
f
×n
2
, in which n
2
denotes the
training set size.
Assuming the Euclidean distance as the similarity
function (as employed the default distance by OPF),
the distance calculation step can be modeled as a ma-
trix association between M
1
(test set) and M
2
(training
set), being f(x, y) in Equation 3 given by:
f(x,y) = (x−y)
2
. (6)
Therefore, Equation 3 can be rewritten as follows:
C = T(M
1
, M
2
, f(x, y)). (7)
After that, a square root must be applied to each ele-
ment c
ij
of the resulting matrix C in order to complete
the Euclidean distance computation:
c
ij
←
√
c
ij
. (8)
In order to address the second step of OPF classi-
fication phase, i.e., to find the lowest path-cost given
by some training node to each test sample, it is first
necessary to compute equation below:
c
ij
← max{c
ij
, cost
j
}, (9)
where cost
j
contains the optimum cost of the train-
ing node j, which is computed in the training step via
traditional OPF. Finally, c
ij
contains all path-costs of-
fered to test sample i by training node j.
In order to solve Equation 2 for testing node i, we
just need to find the lowest value in line i of matrix
C, which can be done in parallel with a reduction op-
eration. For such purpose, we have used a tree-based
parallel reduction operation (Harris, 2010).
4 EXPERIMENTAL RESULTS
In this section we present the experimental results
conducted to show the robustness of the proposed ap-
proach. We have designed two different scenarios for
performance comparisons using computers with dis-
tinct configurations: GPU 1 and GPU 2. The former
is equipped with an Intel Core 2 Quad Q9300 pro-
cessor with 3.24GHz, 4GB DDR3 1333MHz RAM
and an EVGA GeForce GTX 550 Ti 1GB GDDR5
video card with 192 CUDA cores. GPU 2 is equipped
with an Intel Core i7 3770 processor with 3.4GHz,
8GB DDR3 1600MHz RAM and a Gigabyte Geforce
GTX 680 2GB GDDR5 with 1536 CUDA cores. Ba-
sically, the first configuration is a low-cost computer
equipped with a not too old video card. On the other
hand, GPU 2 has been equipped with one of the best
Intel processors available on the market for domestic
users, and also one of the best single GPU video card
for domestic use.
Additionally, two distinct CPU-based equipments
have been used: CPU 1 and CPU 2, which have the
same configurations of GPU 1 and GPU 2, respec-
tively. The difference is that we did not employ the
graphics cards, since they have ran traditional OPF.
In regard to the operational system, we have used
Ubuntu Linux 12.04.1 x86
64 LTS for both scenarios.
We have used datasets with different number of
samples and features in order to evaluate the robust-
ness of GPU-based OPF classification step. Database
1 and 2 refer to non-technical losses identification
in power distribution systems and automatic Ptery-
gium recognition tasks, respectively, being private
datasets. Databases 3 and 4 concern with two pub-
lic available hyperspectral remote sensing images: In-
dian Pines (Landgrebe, 2005) and Salinas (Kaewpijit
et al., 2003). In this case, each pixel is described by
the brightness of each spectral band. Table 1 shows
the information about datasets.
Table 1: Description of the datasets.
Database
# of nodes # of features
Database 1 4952 8
Database 2 15302 89
Database 3 21025 220
Database 4
111104 204
In regard to the experiments, the datasets were
partitioned in two parts: one for training and another
one for testing phase. We used different set sizes in
order to plot a curve of performance, starting from a
training set with 10% of the original dataset and in-
creasing it until 90% with a 10% step. The remaining
dataset on each step has been used as the testing set.
For each step size, the experiments were executed 10
FastOptimum-PathForestClassificationonGraphicsProcessors
629
(a) (b)
(a) (b)
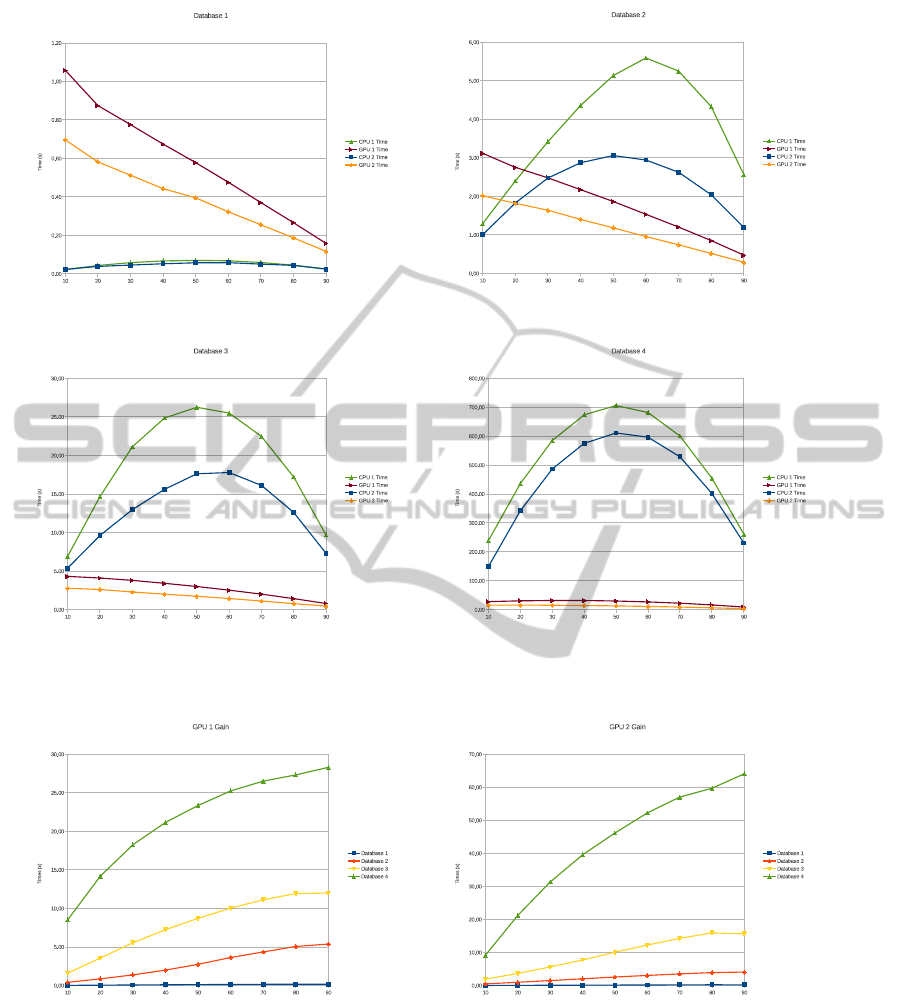
Figure 1: Performance curve for (a) Database 1, (b) Database 2, (c) Database 3 and (d) Database 4.
(a) (b)
Figure 2: Performance gain for (a) GPU 1 and (b) GPU 2.
times with training and testing sets randomly gener-
ated (cross-validation). Figure 1 displays the perfor-
mance curve for all datasets. Tables 2 and 3 display
the mean accuracy and execution times (seconds) for
Computer 1 and 2, respectively.
The reader can note GPU 2 has outperformed
GPU 1 and both CPUs for Databases 2, 3 and 4.
For Database 1, the trade-off between GPU gain and
throughput makes it inviable to the proposed algo-
rithm, since Database 1 is not large enough. In regard
to Database 2, the GPU gain can be observed at 20%
of training set size. Figure 2 presents the gain results
of the proposedapproach for both scenarios, i.e., GPU
1 and GPU 2. One can see it is possible to achieve
VISAPP2014-InternationalConferenceonComputerVisionTheoryandApplications
630

Table 2: Mean accuracy and execution times (s) for Com-
puter 1.
Data
Database 1 Database 2 Database 3
CPU Time 5.79 ± 0.29 26.13 ± 0.61 715.63 ± 4.31
CPU Acc. 56.07 ± 0.65 70.91 ± 0.73 90.98 ± 0.12
GPU Time
1.91 ± 0.05 3.05 ± 0.04 30.56 ± 0.33
GPU Acc. 55.97 ± 0.63 70.91 ± 0.73 90.99 ± 0.12
GPU Gain 3.03x 8.57x 23.42x
Table 3: Mean accuracy and execution times (s) for Com-
puter 2.
Data
Database 1 Database 2 Database 3
CPU Time 3.03 ± 0.03 17.46 ± 0.12 613.30 ± 2.74
CPU Acc. 56.02 ± 0.77 70.92 ± 0.62 91.08 ± 0.10
GPU Time
1.18 ± 0.01 1.75 ± 0.01 13.19 ± 0.04
GPU Acc. 56.00 ± 0.79 70.92 ± 0.62 91.08 ± 0.10
GPU Gain 2.57x 9.98x 46.50x
very interesting results with the proposed approach,
which can be better observed in large datasets.
5 CONCLUSIONS
This work presented a massive parallel approach for
OPF testing phase, A parallel operation called ma-
trix association, which can be seen as a generalization
of a matrix multiplication procedure, has been pro-
posed to consider this kind of data structure in order
to maximize the gain of GPUs. Experimental results
have shown the performance gain of the proposed ap-
proach in 3 out 4 databases, being the worst result in
the smaller database, which highlights the main usage
of GPU-based algorithms in applications that require
a large volume data.
It is worthy noting that GPU 1 configuration can
be found at $130 by the time this article was submit-
ted, meaning that to develop parallel pattern recogni-
tion application is not exclusive only for those with
expensive equipments, even with large datasets.
ACKNOWLEDGEMENTS
The authors are grateful to FAPESP grants
#2009/16206-1, #2010/12697-8 and #2011/08348-
0, and CNPq grants #470571/2013-6 and
#303182/2011-3.
REFERENCES
All`ene, C., Audibert, J. Y., Couprie, M., Cousty, J., and
Keriven, R. (2007). Some links between min-cuts,
optimal spanning forests and watersheds. In Proceed-
ings of the International Symposium on Mathematical
Morphology, pages 253–264. MCT/INPE.
Catanzaro, B., Sundaram, N., and Keutzer, K. (2008). Fast
support vector machine training and classification on
graphics processors. In Proceedings of the 25th inter-
national conference on Machine learning, pages 104–
111, New York, NY, USA. ACM.
Cormen, T. H., Leiserson, C. E., Rivest, R. L., and Stein, C.
(2001). Introduction to Algorithms. The MIT Press, 2
edition.
Duda, R. O., Hart, P. E., and Stork, D. G. (2000). Pattern
Classification (2nd Edition). Wiley-Interscience.
Gainaru, A., Slusanschi, E., and Trausan-Matu, S. (2011).
Mapping data mining algorithms on a GPU architec-
ture: a study. In Proceedings of the 19th interna-
tional conference on Foundations of intelligent sys-
tems, ISMIS’11, pages 102–112, Berlin, Heidelberg.
Springer-Verlag.
Harris, M. (2010). Optimizing parallel reduction in CUDA.
Jang, H., Park, A., and Jung, K. (2008). Neural network im-
plementation using CUDA and OpenMP. In DICTA
’08: Proceedings of the 2008 Digital Image Com-
puting: Techniques and Applications, pages 155–161,
Washington, DC, USA. IEEE Computer Society.
Kaewpijit, S., Moigne, J., and El-Ghazawi, T. (2003).
Automatic reduction of hyperspectral imagery using
wavelet spectral analysis. IEEE Transactions on Geo-
science and Remote Sensing, 41(4):863–871.
Landgrebe, D. (2005). Signal Theory Methods in Multi-
spectral Remote Sensing. Wiley, Newark, NJ.
Oh, K. and Jung, K. (2004). GPU implementation of neural
networks. Pattern Recognition, 37(6):1311–1314.
Papa, J. P., Falc˜ao, A. X., Albuquerque, V. H. C., and
Tavares, J. M. R. S. (2012). Efficient supervised
optimum-path forest classification for large datasets.
Pattern Recognition, 45(1):512–520.
Papa, J. P., Falc˜ao, A. X., and Suzuki, C. T. N. (2009). Su-
pervised pattern classification based on optimum-path
forest. International Journal of Imaging Systems and
Technology, 19(2):120–131.
FastOptimum-PathForestClassificationonGraphicsProcessors
631
