
Feasibility of Hybrid Gait Training with Kinesis Overground Robot for
Persons with incomplete Spinal Cord Injury
Antonio J. del-Ama
1,2
,
´
Angel Gil-Agudo
1
, Jos
´
e L. Pons
2
and Juan C. Moreno
2
1
Biomechanics and Technical Aids Department, National Hospital for Spinal Cord Injury, Toledo, Spain
2
Bioengineering Group of the Spanish National Research Council, Madrid, Spain
Keywords:
Spinal Cord Injury, FES, Exoskeleton, Gait Training.
Abstract:
Hybrid actuation and control have a considerable potential for walking rehabilitation but there is a need of
novel hybrid control strategies that adequately manage the balance between FES and robotic controllers. A
hybrid co-operative control strategy for overground gait training with a wearable robotic exoskeleton for per-
sons with incomplete spinal cord injury (SCI) is presented. The feasibility of the control strategy to overcome
muscular stimulation electro-mechanical delay, deterioration of muscle performance over time, and to balance
muscular and robotic actuation cyclic overground walking is tested in one subject with incomplete spinal cord
injury (L4, ASIA grade D). The results demonstrate that the proposed hybrid cooperative control in Kinesis
overground robot is able to autonomously compensate a bilateral pathologic walking pattern and the suitability
of Kinesis hybrid gait training robot for conducting clinical experimentation.
1 BACKGROUND
Most therapies for rehabilitation of walking rely on
the assumption that task-oriented practice promotes
mechanisms of neural plasticity, muscle strength
and learning of compensation strategies that increase
walking ability of the person with SCI. Robotic tech-
nology holds a considerable potential to drive such
interventions. Ambulatory robots, that have been de-
veloped mainly for functional compensation of walk-
ing, can offer a challenging and rich walking ther-
apy. Furthermore, functional electrical stimulation
can drive rehabilitation interventions of SCI provid-
ing several physiological and psychological benefits
to the user through artificial activation of paralyzed
muscles. On the other hand, robotic exoskeletons can
be used to manage the unavoidable loss of perfor-
mance of FES-driven muscles. Hybrid exoskeletons
are then regarded as a promising approach that blends
complementary robotic and neuroprosthetic technolo-
gies. The overview of the state of the art on hybrid
gait systems has demonstrated that such redundant
actuated solutions can produce feasible systems for
accurate control of joint movement (Del-Ama et al.,
2012a). Also, it has shown that diverse muscle fa-
tigue management strategies could be applied for an
effective closed-loop control of FES.
Under this hybrid scenario, the assist-as-needed
control strategy has been proposed as a new redun-
dant neuroprosthetic and robotic system that cooper-
ates to optimize the outcome of the active control of
the motion of the knee joint while providing assis-
tance (Del-Ama et al., 2013). While various wearable
exoskeletons were successful in achieving gait in sub-
jects with incomplete SCI (Dollar and Herr, 2007),
(Dollar A.M.; Herr, 2008), (Hesse et al., 2010) this
has generally been proposed as a functional substitu-
tion. In this case study, we tested the feasibility of
a novel hybrid gait training approach with an over-
ground robot on a person with an incomplete SCI.
2 MATERIAL AND METHODS
2.1 Subject
Target population of Kinesis is comprised by patients
whose SCI is located under the second lumbar ver-
tebrae. The subject was a 43-year old male (75 kg.
and 1.77 m. height). The subject suffered a trau-
matic lesion at L4 (ASIA grade D). The subject met
the criteria of the target population of Kinesis, cate-
gorized as Conus Medularis (Hayes et al., 2000). The
prognosis of functional recovery of walking is that the
subject could walk short distances but depending on
190
del-Ama A., Gil-Agudo Á., Pons J. and Moreno J..
Feasibility of Hybrid Gait Training with Kinesis Overground Robot for Persons with incomplete Spinal Cord Injury.
DOI: 10.5220/0004659701900193
In Proceedings of the International Congress on Neurotechnology, Electronics and Informatics (RoboAssist-2013), pages 190-193
ISBN: 978-989-8565-80-8
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

the wheelchair for community ambulation, therefore a
successful hybrid walking therapy could provide ben-
efits to this population. The subject has a preserved
hip flexion ability, partial ability to generate volun-
tary knee extension and is in presence of mild spastic-
ity. The subject provided written informed consent by
signing a form that was approved by the Spinal Cord
National Hospital Review Board. As consequence of
the accident, the patient had a limited articular range
at both knees, which led to adaptation of the kine-
matic pattern of the left leg to meet these physical
constraints. The modification consisted on increasing
the stance angle to met the maximum extension an-
gle for the left leg, and to scale the flexion-extension
pattern from stance angle to 60 degrees.
2.2 Protocol
The subject participated in the hybrid gait training
testing session (HGTT) to determine the feasibility of
overground control of walking with Kinesis. Prior to
the HGTT, the patient underwent a stimulation test
and a training session. The stimulation test was em-
ployed to quantify the muscular response to the mus-
cle stimulation and also to get the patient used to the
stimulation. Within this stimulation test, both flexor
and extensor knee muscle groups of both legs were
stimulated for 15 minutes. Then, a training session
took place in which the subject carried out learning
exercises with the Kinesis system. In this training ses-
sion the basic walking technique was explained to the
user (bend to the side to lift the heel prior to initiate a
step and then pressing a manual button). Kinesis was
adjusted to the patient anthropometry within this ses-
sion. Total time walking in this training session did
not exceed from 10 minutes. During HGTT kinesis
hybrid-cooperative controller modulated both stimu-
lation and robotic assistance during walking.
2.3 Hybrid Cooperative Control in
Kinesis
Kinesis is a hybrid robotic device that has been devel-
oped for overground gait training in incomplete spinal
cord injuries. The Kinesis system is a bilateral wear-
able knee-ankle-foot orthosis, equipped with active
actuators at the knee hinges (Maxon DC flat motor,
90W with Harmonic-Drive 100:1 gear) and a passive
elastic actuator at the ankle. Force sensing resistors
are employed for monitoring floor contact and cus-
tom force sensors are available to measure interac-
tion torques. Kinesis has a PC-controlled stimulator
(Rehastim, Hasomed GmbH) which delivers biphasic
current-controlled rectangular pulses. Rehastim can
be pulse width and current controlled in real time.
The high-level control approach to achieve a coop-
erative behavior comprises four main components: 1)
robotic or joint controller, 2) FES controller, 3) mus-
cle fatigue estimator (MFE), and 4) a finite-state ma-
chine (FSM) that orchestrates the FES and joint con-
trollers. Further details on the implementation of the
high-level control can be found in (Del-Ama et al.,
2012b) and (Del-Ama et al., 2013). The cooperative
behavior of Kinesis allows obtaining adequate and
personalized stimulation patterns, estimating muscle
fatigue and reducing robotic assistance during ambu-
latory walking. The ultimate goal is to give priority to
the muscle-generated torque during gait training. A
finite-state machine is employed to iteratively control
the FES of knee muscles in a learning scheme dur-
ing for each leg while adapting torque field stiffness
for a reference kinematic pattern. In this scheme, the
resulting interaction torque (with added mass and in-
ertia of the leg) is monitored and used towards con-
vergence of stimulation parameters. The robot mod-
ulates its assistance by reducing joint stiffness and
ensuring the target flexion angle for effective swing
of the leg. A muscle fatigue estimator is employed
(based on the measurement of interaction torque) to
trigger a fatigue compensation strategy (change stim-
ulation firing rate). More detailed descriptions of the
technique for hybrid cooperative control of Kinesis
are discussed in (Del-Ama et al., 2013) and (Del-Ama
et al., 2012b).
2.4 Robot Stiffness Modulation Strategy
The strategy to modulate the exoskeletal knee stiff-
ness during cyclic walking is described in this sec-
tion. The efficacy of the FES controller to gener-
ate the knee movement is inherently limited, due to
the low efficiency of the force generated by the stim-
ulated muscles and the electromechanical delay be-
tween the stimulus and the onset of joint movement.
The goal of the hybrid control strategy was therefore
to exploit the joint movement generated by the NP
while supporting the movement through the NR. A
controller was employed to provide compliant assis-
tance to the knee, depending upon the parameter K
k
,
the stiffness of the force field applied around the tra-
jectory. Modulation of K
k
was executed depending
on the gait phase and the contribution of the FES to
the knee trajectory. Thus, gait phase and muscle con-
tribution were managed within a finite state machine
(FSM), comprised of two FSMs operating in parallel:
one FSM runs in the time domain (t-FSM) while the
other operates in the cycle domain (c-FSM). The t-
FSM detected the main walking states and the transi-
FeasibilityofHybridGaitTrainingwithKinesisOvergroundRobotforPersonswithincompleteSpinalCordInjury
191
tions among them. The c-FSM operated with discrete
values, during each swing phase, that are related to
performance of the stimulated muscle. This allows to
uncouple the closed-loop control of stimulation from
the muscle fatigue monitoring and management.
Muscle fatigue results in a decrease of muscle per-
formance thus increasing the interaction torque. This
increase can be automatically compensated with the
closed-loop FES controller reducing the interaction
torque.
The t-FSM modulated the force field stiffness K
k
and set the kinematic pattern, depending on the walk-
ing state. The compliant behavior of the exoskeleton
was achieved by controlling knee trajectory through a
first order torque field imposed around the joint trajec-
tory. As a result, the joint torque imposed by the robot
depended on the deviation of the knee trajectory from
the kinematic pattern and the stiffness of the torque
field K
k
. The width of a virtual tunnel where the knee
can actually move could be adjusted along time. Dur-
ing stance, a high stiffness torque field was imposed
to provide sufficient support and avoid knee collapse.
Conversely, the supportive actions of the exoskeleton
must be reduced during the swing phase to allow for
the contribution of stimulated muscles and passive dy-
namics. The former requirement was achieved by re-
ducing the support of the robot through a wider vir-
tual tunnel. At the end of each swing phase, prior to
contacting the floor, the robot gradually increased its
support to ensure full knee extension, through a pro-
gressive increment in the force field stiffness. How-
ever, this late stiffness for foot contact is insufficient
for weight support and therefore, a quick transition to
high stiffness required for stance was implemented.
2.5 Biomechanical Evaluation
The analysis of feasibility was performed at the
biomechanical level. We assessed the actual knee
joint kinematics and stiffness during overground hy-
brid control of gait.
3 RESULTS
We describe the observed performance of the over-
ground hybrid control during the first and last steps of
the HGTT followed by the observed evolution in the
automatic control of the stimulation of the quadriceps
muscles.
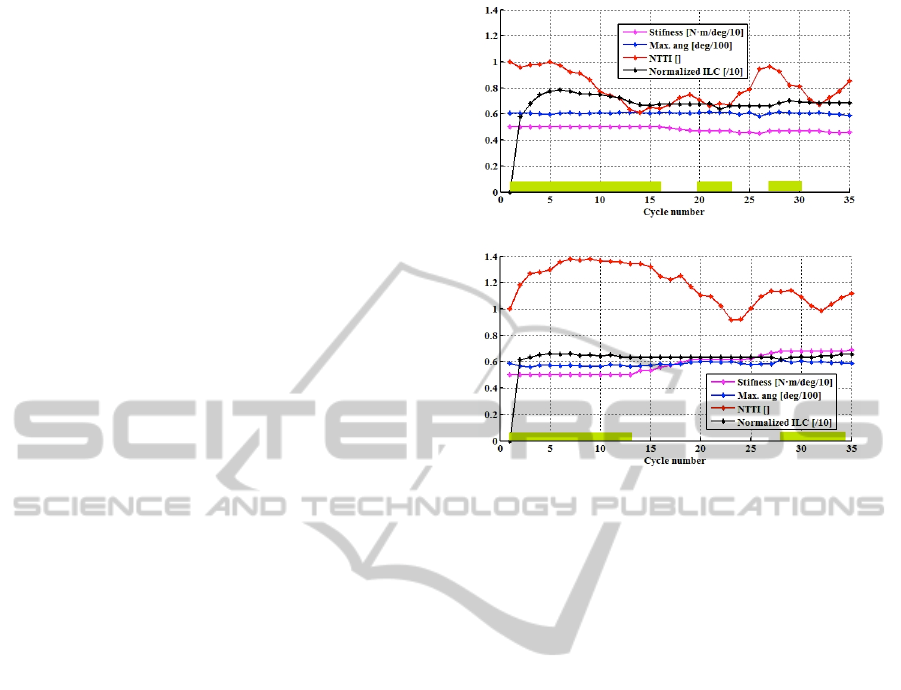
Figure 1: Results of HGTT session (cycle domain) for left
(top) and right (bottom) legs. Controller stiffness (magenta
curve), normalized torque-time integral (NTTI, red curve),
maximum angle achieved during flexion (blue curve) and
normalized stimulation intensity for knee flexor muscles
(NILC, black curve) of both legs. Active learning state
is represented by green boxes, otherwise monitoring state.
Controller stiffness, maximum angle and normalized stim-
ulation curves are scaled.
3.1 Stiffness Modulation Performance
and FES Management
The stimulation pattern of both legs is represented in
the cycle-domain (Figure 1). The NILC of the right
leg reached a 60% of the maximum stimulation in-
tensity achievable for the swing phase in the first it-
eration, thus reacting to the voluntary knee extension
exerted by the patient. The active contribution of the
patient had also an impact on the interaction forces, as
shown in the Figure 1, in particular in the progressive
increase on NTTI (normalized time torque integral)
values along the first 7 steps.
These can be explained as a particular strategy
adopted by the patient towards the robotic and neu-
roprosthetic assistance. After the first swing cycle,
the patient reacted by increasing the active knee ex-
tension during consecutive cycles, and thus, increas-
ing the NTTI. It is noticeable that after the learning
period (cycle 14), the stiffness was automatically in-
creased as a response to the augmented active exten-
sion, targeting 60 degrees of knee flexion (Figure 1b).
After the first learning period, a decrease on NTTI
is observed, explained by the stimulation effect and
NEUROTECHNIX2013-InternationalCongressonNeurotechnology,ElectronicsandInformatics
192
patient learning. Then, until cycle 27, fatigue was-
detected and a new learning period took place. Con-
versely, the increase on the stimulation intensity for
the left leg muscle was significantly slow. After the
learning period was completed for this muscle, the
stiffness could not be significantly reduced to accom-
plish the kinematic pattern.
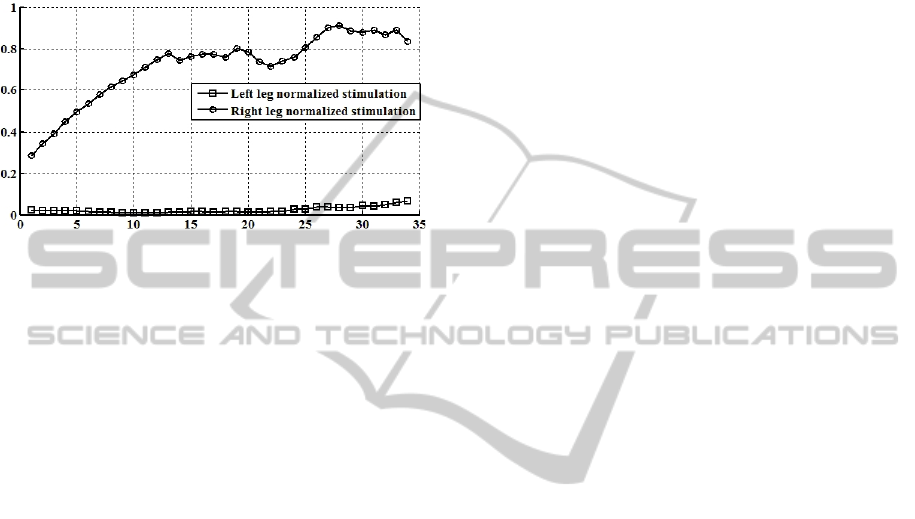
Figure 2: Normalized stimulation of the right and left
quadriceps muscles during stance with hybrid cooperative
control (x axis: number of steps).
Figure 2 depicts the averaged quadriceps stimula-
tion intensity for the stance phases for both legs dur-
ing the HGTT. It is noticeable the high stimulation in-
tensity applied to the left leg, in response to a flexion
posture exhibited by the patient during stance phases.
Furthermore, as the experiment progressed and more
steps were taken, the stimulation intensity progres-
sively augmented until reaching a plateau (step 13).
4 DISCUSSION
The specific functional deficit of the subject lead to
a limitation on the maximum (left) knee extension,
which caused the patient to exert compensating ac-
tions. These compensations were effectively counter-
acted by the hybrid gait control. The compensating
actions differed for both side and stance and swing
phases of gait. During stance, on average, the pa-
tient flexed the right knee in an attempt to compen-
sate for the flexion angle of the left knee. The robotic
actuation compensated the stimulation as needed: the
displayed stiffness was sufficient to provide compli-
ant but adequate support during stance phases. We
also noticed that during pre-swing phases, the subject
consistently changed from flexion to extension, prob-
ably as a response to the limited range of movement
of the right knee. We concluded that the hybrid co-
operative control in Kinesis is able to compensate a
bilateral pathologic walking pattern by autonomously
increasing the stimulation of the flexor muscles and
increasing the displayed stiffness of the robotic actu-
ator.
REFERENCES
Del-Ama, A. J., Gil-Agudo, A., Pons, J. L., and Moreno,
J. C. (2013). Hybrid FES-robot cooperative control of
ambulatory gait rehabilitation exoskeleton for spinal
cord injured users. Manuscript submitted for publica-
tion (Mar 2013).
Del-Ama, A. J., Koutsou, A. D., and Moreno, J. C. (2012a).
Review of hybrid exoskeletons to restore gait follow-
ing spinal cord injury. Journal of Rehabilitation Re-
search and Development, 49(4):497–514.
Del-Ama, A. J., Moreno, J. C., Gil-agudo, A., and Pons,
J. L. (2012b). Hybrid FES-robot cooperative con-
trol of ambulatory gait rehabilitation exoskeleton for
spinal cord injured users. In Pons, J. L., Torricelli, D.,
and Pajaro, M., editors, 2012 International Confer-
ence on Neurorehabilitation (ICNR2012): Converg-
ing Clinical and Engineering Research on Neuroreha-
bilitation, Toledo (Spain). Springer Heidelberg New
York.
Dollar, A. M. and Herr, H. (2007). Active Orthoses for the
Lower-Limbs: Challenges and State of the Art. IEEE
International Conference on Rehabilitation Robotics,
1:968–977.
Dollar A.M.; Herr, H. (2008). Lower Extremity Exoskele-
tons and Active Orthoses: Challenges and State-of-
the-Art. IEEE Transactions on Robotics, 24(1):144–
158.
Hayes, K., Hsieh, J., Wolfe, D., Potter, P., and Delaney, G.
(2000). Classifying incomplete spinal cord injury syn-
dromes: Algorithms based on the international stan-
dards for neurological and functional classification
of spinal cord injury patients. Archives of physical
medicine and rehabilitation, 81(5):644–652.
Hesse, S., Waldner, A., and Tomelleri, C. (2010). Inno-
vative gait robot for the repetitive practice of floor
walking and stair climbing up and down in stroke pa-
tients. Journal of NeuroEngineering and Rehabilita-
tion, 7:30.
FeasibilityofHybridGaitTrainingwithKinesisOvergroundRobotforPersonswithincompleteSpinalCordInjury
193
