
Multi-class Image Classification
Sparsity does it Better
Sean Ryan Fanello
1,2
, Nicoletta Noceti
2
, Giorgio Metta
1
and Francesca Odone
2
1
Department of Robotics, Brain and Cognitive Sciences, Istituto Italiano di Tecnologia,
Via Morego 30, 16163, Genova, Italy
2
DIBRIS, Universit
`
a degli Studi di Genova, Via Dodecaneso 35, 16146, Genova, Italy
Keywords:
Sparse Representation, Discriminative Dictionary Learning, Object Recognition and Categorization.
Abstract:
It is well assessed that sparse representations improve the overall accuracy and the systems performances of
many image classification problems. This paper deals with the problem of finding sparse and discriminative
representations of images in multi-class settings. We propose a new regularized functional, which is a modifi-
cation of the standard dictionary learning problem, designed to learn one dictionary per class. With this new
formulation, while positive examples are constrained to have sparse descriptions, we also consider a contribu-
tion from negative examples which are forced to be described in a denser and smoother way. The descriptions
we obtain are meaningful for a given class and highly discriminative with respect to other classes, and at the
same time they guarantee real-time performances. We also propose a new approach to the classification of
single image features which is based on the dictionary response. Thanks to this formulation it is possible
to directly classify local features based on their sparsity factor without losing statistical information or spatial
configuration and being more robust to clutter and occlusions. We validate the proposed approach in two image
classification scenarios, namely single instance object recognition and object categorization. The experiments
show the effectiveness in terms of performances and speak in favor of the generality of our method.
1 INTRODUCTION
The problem of finding good representations of the
data is crucial in many computer science fields. A
specificity of computer vision is that input data – im-
ages or sequences of images – live in high dimen-
sional spaces. In this case the problem of representing
data “appropriately” may be formulated as a dimen-
sionality reduction or sparse coding problem – the
latter particularly important if real-time performances
are required.
Over the years, there have been many attempts to de-
sign and develop compact representations of image
content – mostly based on the extraction of local and
interesting characteristics – to be applied to image
registration, matching or object recognition. Image
patches, corners, SIFT and variants (Lowe, 2004),
SURF (Bay et al., 2008), HOG (Dalal and Triggs,
2005) are just a few examples.
In classification tasks, it has been shown that the
sparsity of the data representations improves the over-
all classification accuracy – see for instance (Viola
and Jones, 2004; Destrero et al., 2009) and references
therein. One of the most used techniques is the so
called sparse coding, first introduced in (Olshausen
and Fieldt, 1997). We refer to adaptive sparse coding
when the coding is guided from data. In this case, we
require an early stage, called dictionary learning. The
goal is to learn a basis – a set of atoms – allowing to
reconstruct the input data with a small reconstruction
error (Olshausen and Fieldt, 1997; Yang et al., 2009;
Yang et al., 2010; Wang et al., 2010).
In this work we propose a regularized framework
for data-driven dictionaries learning based on the use
of a new method for sparse coding, we called Dis-
criminative and Adaptive Sparse Coding (DASC).
We consider a multi-class setting and build a dictio-
nary for each class. More specifically, we propose to
modify the standard dictionary learning functional by
adding a new term that forces the descriptors of nega-
tive examples to be smooth and dense, as opposed to
the positive examples which are constrained to have
a sparser representation. The final dictionary is a col-
lection of all the dictionaries obtained by minimizing
the functionals considering each class separately. In-
deed, with a sparse representation we may employ lin-
ear classifiers instead of non-linear models that usu-
ally conflict with real-time requirements. Fig. 1 gives
800
Fanello S., Noceti N., Metta G. and Odone F..
Multi-class Image Classification - Sparsity does it Better.
DOI: 10.5220/0004295908000807
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 800-807
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

an idea of the pipeline we follow in the case of appli-
cation to an object classification problem.
The properties of the proposed functional not only
ensure good performances with linear classifiers, but
moreover can be used directly in the classification
stage. Indeed, we also propose to exploit the dictio-
nary mechanism for the classification task by classi-
fying each single feature on the basis of the dictionary
response, rather than using the reconstruction error
(Yang et al., 2008; Skretting and Husy, 2006; Peyr
´
e,
2009; Mairal et al., 2008a). The main advantage of
this choice is that the classification of local features
allows us to deal with occlusions and presence of clut-
tered background.
Most of the approaches usually focus on learn-
ing dictionaries based on the reconstruction error
(Yang et al., 2008; Skretting and Husy, 2006; Peyr
´
e,
2009), and do not exploit the prior knowledge of the
classes even in supervised tasks. In (Mairal et al.,
2008a) it has been proposed a discriminative method
to learn dictionaries, i.e. learning one dictionary for
each class. Later in (Mairal et al., 2008b) the au-
thors extend (Mairal et al., 2008a) by learning a sin-
gle shared dictionary and models for different classes
mixing both generative and discriminative methods.
There have been some attempts to learn invariant mid-
dle level representations (Wersing and K
¨
orner, 2003;
Boureau et al., 2010), while some other works use
sparse representation as main ingredient for feed for-
ward architectures (Hasler et al., 2007; Hasler et al.,
2009). Most recent works focus on learning general
task purposes dictionaries (Mairal et al., 2012) or they
look at the pooling stage (Jia et al., 2012) trying to
learn the receptive fields that better catch all the im-
age statistics.
In this work, we exploit the power of low-level
features from a different perspective, i.e. taking ad-
vantage on the sparsity. The main contributions of
our work can thus be summarized as follows
• A new functional for learning discriminative and
sparse image representations, that exploits prior
knowledge on the classes. Unlike other ap-
proaches, when building the dictionary of a given
class, we also consider the contributes of negative
examples. This allows us to obtain more discrim-
inative representations of the image content.
• A new classification scheme based on the dictio-
nary response, as opposed to the reconstruction
error, that allows us to exploit the representative
power of the dictionaries and be robust to oc-
clusions. This solution is naturally applicable to
multi-class scenarios and preserves the local fea-
tures configuration.
We experimentally validate the method we propose
showing its applicability to two different classifica-
tion tasks, namely single instance object recognition
and object categorization. As for the first task, we
use a dataset acquired in-house including 20 objects
of different complexity, characterized by variability
in light conditions, scale, background. In the case of
categorization, instead, we consider a collection of 20
classes from the benchmark Caltech-101 dataset. In
both cases, we will show that the solution we propose
outperforms other approaches from the literature.
2 PRELIMINARIES
In this section we review the traditional approach
to dictionary learning and describe the classification
pipeline commonly used in literature in combination
with such representation scheme. This will set the ba-
sis to discuss the contributions of our approach.
2.1 General Classification Framework
We first briefly introduce the classification pipeline
commonly adopted with the sparse coding. It can be
mainly divided in four main stages.
1. Features Extraction. A set of descriptors
x
1
, . . . , x
m
I
are extracted from a test image I.
Examples of local descriptors are image patches,
SIFT (Lowe, 2004), or SURF (Bay et al., 2008)
(either sparse or dense).
2. Coding Stage. The coding stage maps the in-
put features x
1
, . . . , x
m
I
into a new overcomplete
space u
1
, . . . , u
m
I
.
3. Pooling Stage. The locality of the coded descrip-
tors u
1
, . . . , u
m
I
cannot catch high level statistics
of an image, therefore a pooling step is required.
It can be performed at image level or with a multi-
scale approach (see e.g. (Boureau et al., 2010)). It
has been experimentally shown that the max pool-
ing operator obtains the highest performances in
classification tasks (Boureau et al., 2010). With
this operator an image is encoded with single fea-
ture vector ¯u ∈ R
d
, where each component ¯u
j
is
¯u
j
= max
i
u
ji
∀i = 1, . . . , m
I
(1)
4. Classification The final description is fed to a
classifier such as SVM (Vapnik, 1998). Codes ob-
tained through vector quantization usually require
ad-hoc kernels to obtain good performances, in-
stead, sparse coding approaches have shown to
be effective if combined with linear classifiers,
also ensuring real-time performances (Yang et al.,
2009).
Multi-classImageClassification-SparsitydoesitBetter
801
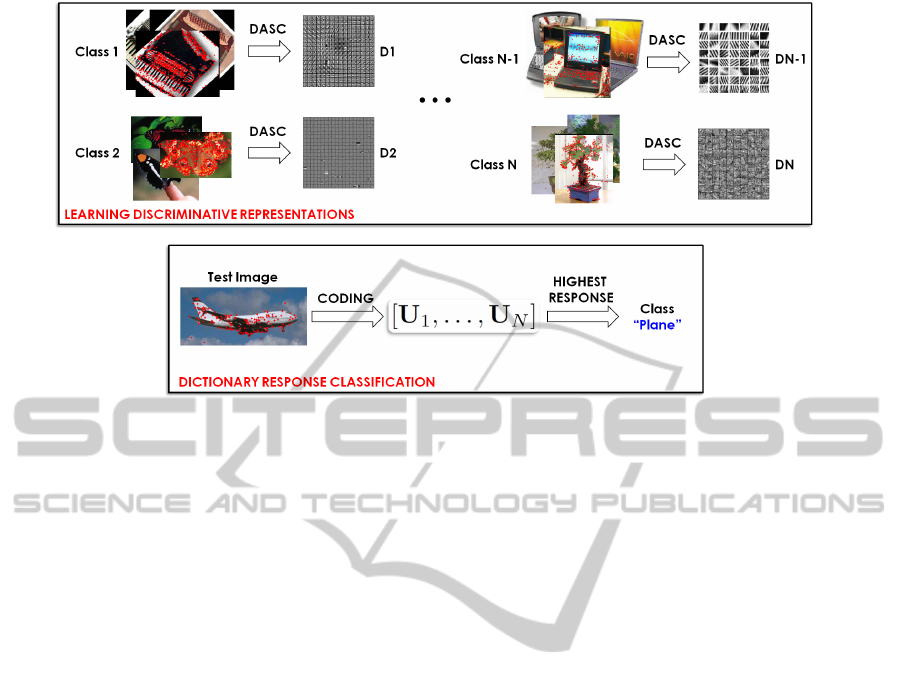
Figure 1: An overview of our framework. We consider a multi-class setting. We build a dictionary for each class proposing a
new method for Discriminative and Adaptive Sparse Coding (DASC). During classification, we exploit the dictionary response
rather than the reconstruction error (see text for details).
2.2 Adaptive Sparse Coding
The goal of sparse coding is to decompose a signal
into a linear combination of a few elements from a
given or learned dictionary. We consider the latter
case where the sparse coding is adaptive, i.e. it is
guided from the available data. In this case, the prob-
lem of dictionary learning may be stated as follows.
Dictionary Learning. Given a training set of im-
ages, let X = [x
1
, . . . , x
m
] ∈ R
n×m
be the matrix
whose m columns x
i
∈ R
n
are the descriptors (fea-
ture vectors) extracted from all the images. The goal
is to learn a dictionary D (a n × d matrix, with d the
dictionary size and n the feature vector size) and a
code U (a d × m matrix) that minimize the recon-
struction error:
min
D,U
kX − DUk
2
F
+ λkUk
1
(2)
where k· k
F
is the Frobenius norm. As for the spar-
sity, it is known that the l
1
norm yields to sparse
results while being robust to signals perturbations.
Other penalties such as the l
0
norm could be em-
ployed, however the problem becomes NP-hard and
there is no guarantee that greedy algorithms could
reach the optimal solution.
Notice that fixing U, the above optimization reduces
to a least square problem, whilst, given D, it is equiv-
alent to a linear regression with the sparsifying norm
l1. The latter problem is referred to as a feature se-
lection problem with a known dictionary (Lee et al.,
2007). One of the most efficient algorithms that con-
verges to the optimal solution of the problem in Eq. 2
is the feature-sign search algorithm (Lee et al., 2007).
2.3 Classification based on the
Reconstruction Error
The general classification approach described in Sec.
2.1, is appropriate for many classification tasks. How-
ever, the pooling stage, that showed to be effective
especially for image categorization problems, usually
loses information about spatial configuration or se-
mantic characteristics of the features. In order to pre-
serve these properties, which are particularly relevant
e.g. for part-based object recognition, a local classi-
fication scheme is desirable. The purpose is to assign
each local feature to the most likely object class. A
common approach (Yang et al., 2008; Skretting and
Husy, 2006; Peyr
´
e, 2009; Mairal et al., 2008a) is
based on the use of the reconstruction error, defined
as:
R(x, D, u
∗
) ≡ ||x − Du
∗
||
2
F
(3)
where x ∈ R
n
is a feature vector, D is the dictionary
(n × d matrix) and u
∗
∈ R
d
is the code computed as:
u
∗
= min
u
||x − Du||
2
F
+ λkuk
1
(4)
In a classification problem with N classes, if each
class i is assigned a dictionary D
i
, the code u
i
is first
computed via Eq. 4 for each dictionary. Then the fea-
ture vector x is assigned to the class i
∗
that minimizes
the reconstruction error R (Yang et al., 2008):
i
∗
= arg min
i
R(x, D
i
, u
i
). (5)
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
802

3 LEARNING DISCRIMINATIVE
REPRESENTATIONS: OUR
METHOD
In this section we discuss the details of our method
to learn sparse image representation and exploit it for
classification tasks. Thus, recalling the general clas-
sification framework described in Sec. 2.1, we con-
tribute to steps 2 and 4 of the pipeline. In what fol-
lows, firstly we propose a modification of the func-
tional of Eq. 2 that also includes a contribution from
the negative examples and leads to more discrimina-
tive descriptors. Then, we show that classifying each
single feature using the dictionary responses rather
than the reconstruction error is more effective.
3.1 Discriminative and Adaptive Sparse
Coding
Unlike previous works – that do not discriminate
among the different classes – our idea is to learn a
suitable representation exploiting the benefit of spar-
sity, and introducing a further constraint on the nega-
tive examples that we force to be more densely rep-
resented. To this end, we propose a new regular-
ized method – we called Discriminative and Adaptive
Sparse Coding (DASC) – that we exploit to build a
dictionary for each class, increasing their discrimina-
tive power.
Let us consider a supervised (classification) prob-
lem with N classes, and let X
i
= [x
1
, . . . , x
m
i
]
be a d × m
i
matrix whose columns are the train-
ing vectors of the i − th class. Also, let X
i
=
[X
1
, X
2
, . . . , X
i−1
, X
i+1
, . . . , X
N
] be the training
examples of the other classes. When learning the dic-
tionary of class i, features belonging to it are con-
strained to be sparse, while features belonging to any
other class j, j 6= i, are forced to be as smoother as
possible. Hence, in order to learn the dictionary D
i
of the i − th class, which is a n × d
i
matrix, where d
i
is the number of atoms and n the length of the feature
vector x
k
, we propose to minimize:
E = ||X
i
− D
i
U
i
||
2
F
+ ||X
i
− D
i
U
i
||
2
F
+
+ λ||U
i
||
1
+ µ||U
i
||
2
(6)
with respect to D
i
, U
i
and U
i
, where U
i
is the codes
matrix of class i, while U
i
are the coefficients of all
classes j 6= i. The l
2
-norm induces the coefficients
U
i
to be smooth (i.e. less sparse). So the learned
dictionary still has low reconstruction error, but in ad-
dition negative examples are less sparse. As a conse-
quence, features belonging to class i have a higher re-
Figure 2: An intuition of the capability of the dictionaries
in characterizing the corresponding class. Left: the affinity
matrix. The diagonal blocks (i.e. codes of a same class)
have higher similarity (blue colors) with respect to the rest
(red colors). Right: a comparison of reconstruction errors
and responses of the dictionaries for a test image. See text
for details. Best viewed in color.
sponse if encoded with dictionary D
i
rather than any
other dictionary D
j
, j 6= i.
An intuition of this property is given in Fig. 2. On
the left, we report the affinity matrix, obtained as the
Euclidean distance among the descriptors in an all-
vs-all fashion. The diagonal blocks show higher sim-
ilarity, as they include codes of the same class. This
speaks in favor of the capability of the dictionary of
characterizing the corresponding class. On the right,
we compare the reconstruction errors of a test image
(in the middle of the figure) with the dictionaries re-
sponse, which represents the weight of each dictio-
nary contribution in the linear combination (see Sec.
3.3 for a formal definition). It can be easily noticed
that while the reconstruction errors are comparable
for all classes (even if the correct one shows a slightly
lower value), the response of the correct dictionary
is apparently superior than the others. This suggests
us to adopt this criteria during classification: we will
discuss our approach on Sec. 3.3.
3.2 Optimization Procedure
To solve Eq. 6, we apply an iterative scheme that is
largely used in the dictionary learning literature. We
first notice that Eq. 6 is convex in each single variable
D
i
, U
i
, U
i
but not convex in all the variables simul-
taneously. The minimization of the above problem is
thus carried out by clock coordinate descent (Luen-
berger, 2008). In particular we initialize D
i
with d
i
random examples, where d
i
is the dictionary size; we
fix D
i
and U
i
, thus we compute the solution of U
i
via the features sign algorithm (Lee et al., 2007). No-
tice that minimizing Eq. 6 with respect to U
i
is the
same that minimizing Eq. 2. Indeed the other terms
of the functional are constant and they do not affect
the optimal solution.
Multi-classImageClassification-SparsitydoesitBetter
803

Figure 3: Examples of single features classification via dictionary response. Features are color-coded with respect to their
class. Biggest circles represent features classified correctly.
Fixing D
i
and U
i
we can compute the solution of
U
i
setting the gradient ∇
U
i
E = 0. For simplicity of
the notation we drop the class index i:
∇
U
E = −2D
T
(X − DU) + 2µU (7)
Setting the derivative to zero we obtain:
∇
U
E = 0 ⇒ U = (D
T
D + µI)
−1
D
T
X (8)
where I is the identity matrix d
i
× d
i
. Finally, fixing
U and U we update the solution of D as:
∇
D
E = −2(X − DU)U
T
− 2(X − DU)U
T
(9)
and setting it to zero ∇
D
E = 0 we obtain:
D = (XU
T
+ XU
T
)(UU
T
+ UU
T
)
−1
(10)
This optimization process is repeated for a fixed num-
ber of iterations.
3.3 Classification based on Dictionary
Response
As discussed on Sec. 3.1, the classification based on
the reconstruction error does not guarantee the cor-
rectness of the results.
In literature several experiments confirmed that the
max pooling operator achieves the best results in
terms of classification (Boureau et al., 2010). This
means that dictionary atoms with higher responses are
more representative of the underlying distribution of
the data. Inspired by this consideration and exper-
imentally observing the higher discriminative power
of dictionary responses, we propose a classification
method based on the intensity of dictionary responses
after the coding stage.
We start by considering the Global Dictionary
D = [D
1
, . . . D
N
], with d =
P
N
i=1
d
i
atoms, as the
concatenation of all the class dictionaries previously
learned. We recall that a signal x ∈ R
n
can be de-
composed into a linear combination of dictionary and
codes, i.e. x = DU, with U a d × 1 column vector.
Therefore we can interpret the code U as the rele-
vance of each dictionary atom in the linear combina-
tion. Assuming to know, as in our framework, which
atoms of the dictionary describe a certain class, U can
be interpreted as a concatenation of blocks, each one
including the responses of a dictionary:
U
T
= [u
1
, . . . , u
N
]; (11)
where u
i
is a vector of size d
i
representing the re-
sponse of the i-th dictionary. We can define the re-
sponse H of the i-th class as:
H(u
i
) =
d
i
X
j=1
u
i
j
(12)
where u
i
is the code corresponding to the i-th block
of the global dictionary D and d
i
is the size of the
class dictionary. At this point we can assign each local
feature x to the class i such that:
i
?
= arg max
i
H(u
i
) (13)
This classification scheme has many advantages: first
it exploits the dictionary learning method previously
described, indeed dictionaries will have higher re-
sponse for features belonging to their class. Secondly
it preserves the local information of the features: in-
fact no pooling stages are required, therefore we do
not lose the spatial configuration of the descriptors.
Finally it is natural its application in a multi-class
classification scenario: indeed an image will be clas-
sified using the highest sum of all the local responses.
Figure 3 shows different examples of features
classification in which higher dictionary responses are
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
804

Figure 4: The dataset we used for experiments on single
instance object recognition. It has been acquired in-house
and includes 20 objects of different complexity.
Figure 5: A selection of 20 classes from the popular
Caltech-101 dataset, that we considered within the object
categorization experiments.
highlighted with bigger circles. It is apparent that al-
though the presence of misclassified elements, clus-
ters of coherent features can be detected which reveal
the presence of known objects.
4 EXPERIMENTS
In this section we experimentally validate the pro-
posed method for application to object classifica-
tion. In particular we consider two different problems,
namely Single Instance Object Recognition and Ob-
ject Categorization. In the first class of problems, we
want to classify a specific instance of an object, while
within categorization tasks many different instances
of an object class must be recognized. To this end,
we consider two different datasets, with characteris-
tics appropriate for the two experimental scenarios.
For the first one, we used a dataset acquired in-house,
composed of 20 objects (see Fig. 4) of different com-
plexities. It includes both planar objects (as books and
boxes) and objects with a more complex 3D struc-
ture (as puppets). It represents an appropriate test-
bed for our purposes thanks to the objects variability
as well as the availability of a significant number of
samples. In fact, for each object a training video of
approximately 300 frames is provided which is ac-
quired with a still camera that observes the objects
as they rotate, thus including images from different
view-points. Also, test videos with different charac-
teristics (as variable background, light, scale) are pro-
vided. Although the availability of video, no temporal
information is exploited in our approach, where im-
ages are processed independently. We used 30 images
per class as training set, while the remaining frames
have been used as test set.
For what concerns object categorization, we con-
sidered a selection of classes from the very popular
Caltech-101 dataset (Fei-fei et al., 2006). In this case,
several instances of an object class are provided. The
complexities of this dataset reside in object variabil-
ity, cluttered background and presence of occlusions.
In our experiments we used a subset of 20 classes (see
Fig. 5) for computational reasons (we recall that we
need to build a unique dictionary matrix, that may
have very high dimensions). For each class we used
30 of the available images as training set, while the
others have been used for the test phase (max 50 per
class).
The structure of our method does not depend on
the type of features extracted from the images. In our
experiments,we first run a corner detector and then
compute SIFT descriptors (Lowe, 2004).
4.1 Analysis of the Dictionaries
We first quantitatively evaluated the learned dictionar-
ies in terms of reconstruction error and nonzero ele-
ments with respect to the level of sparsity of the ob-
tained representation. We extracted the feature vec-
tors from each image, and then we learned the dictio-
nary of each class (object instance in single instance
object recognition, category in object categorization)
accordingly to the procedure described on Sec. 3. Re-
calling the notation of Sec. 3, we used m
i
= 1000
features for each class and fixed the dictionary size to
d
i
= 512.
The parameter µ = 0.15 of Eq. 6 has been se-
lected with a cross-validation procedure on the recon-
struction error. Finally, we coded a test set of descrip-
tors using Eq. 4. The results show that descriptors
belonging to a given class i obtain a lower reconstruc-
tion error when using the dictionary blocks corre-
sponding to D
i
than the others. For what concerns the
percentage of nonzero elements, analogously, those
features obtained the highest response from the corre-
sponding dictionary.
We report in Fig. 6 examples of two classes of
different complexity from the Caltech-101. The plots
show the trends of reconstruction error (first row) and
the percentage of nonzero elements (second row) as
Multi-classImageClassification-SparsitydoesitBetter
805
the parameter lambda (i.e. the one controlling the
sparsity) increases. It is apparent that the best per-
forming dictionary is the correct one.
To measure the goodness of the dictionaries, we
compute average reconstruction error and dictionary
response on the two datasets by selecting the values
corresponding to a reference λ = 0.15. We first eval-
uated the average reconstruction error for all the test
images when using the correct dictionary or another
one, obtaining respectively 6 × 10
−4
and 7 × 10
−3
for the single instance dataset, and about 3 × 10
−3
for both in the case of Caltech-101. Similarly, we
computed the average dictionary responses evaluat-
ing the weight of the correct dictionary as opposed to
the others in the sum in Eq. 12. This measures not
only the number of nonzero elements per dictionary,
but also actual contribution of the codes in the lin-
ear combination. In this case we obtained that the
weight of the codes of the correct dictionary is on
average the 53.41% for the single instance dataset,
and the 26.21% for the Caltech-101. On the contrary,
the weight of the other dictionaries is on average the
2.33% per dictionary in the case of single instance ob-
ject recognition, and the 3.78% per dictionary of the
Caltech-101.
4.2 Classification Results
Again, we conduct this experiment in both single
instance and categorization problems. Following a
common procedure, we use a K-fold validation strat-
egy for parameters tuning. We consider K = 10 dif-
ferent runs and randomly select training and test sets,
to obtain a reliable statistic. The average per-class
recognition rates were stored at each run. We report
as final results the recognition rates averaged over the
runs.
For both single instance object recognition and
object categorization, we compare the performances
of classification based on the reconstruction error
(Sec. 2.3) with the approach we propose (Sec. 3.3),
based on the evaluation of the dictionary responses,
both coupled with our functional (Eq. 6). Also, on
top of the proposed learned coded we consider a linear
classifier comparing the approach described in (Yang
et al., 2009), which does not consider prior informa-
tion on the classes, as opposed to the use of the dic-
tionaries of each class trained as described in Sec. 3.
Table 1 reports the obtained results. The pro-
posed classification scheme based on the dictionary
responses outperforms the one based on the recon-
struction error, but it is still far from comparing the
accuracy obtained by employing a learning algorithm
such as SVM. SVMs with per class dictionaries ob-
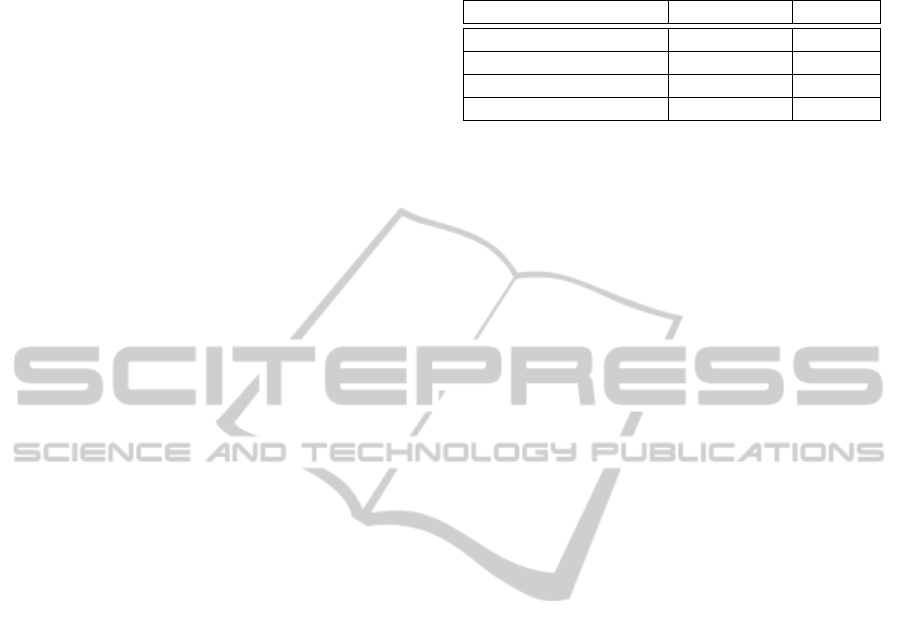
Table 1: Accuracy results for single instance object recog-
nition and object categorization.
Method S. I. Obj. Rec. Obj. Cat.
Reconstruction Error 78.41% 22.23%
Dictionary Response 89.32% 59.68%
SVM + Dictionary 94.12% 76.95%
SVM + Class Dictionary 97.21% 84.43%
tains better results with respect to the traditional ap-
proach (Yang et al., 2009).
5 DISCUSSION
In this work we tackled the problem of finding
compact and discriminative image representations by
means of the sparse coding theory. We considered
a multi-class classification setting typical of object
recognition and image categorization. We proposed
to modify the standard dictionary learning functional
by adding a term accounting for the negative samples
and forcing them to be associated with smoother and
denser descriptors. On the contrary, positive samples
descriptors are constrained to be sparse. We showed
that this approach provides highly discriminative rep-
resentations and is very effective from the computa-
tional standpoint thanks to compactness and usability
with linear kernels.
We also showed that the dictionary responses can be
directly used as a criteria for image feature classifica-
tion in a new scheme we proposed here. Thanks to
this formulation, important features properties, as e.g.
the spatial configurations, can be kept and exploited
for subsequent steps in the analysis (as in part-based
object recognition).
To show the generality of our approach, we con-
sidered object classification from two different per-
spectives. In particular, we faced the problem of sin-
gle instance object recognition and object categoriza-
tion. We used two different dataset that captured the
peculiarities of the two scenarios, namely an in-house
acquired dataset of 20 objects for the first problem,
and a selection of 20 classes from the well-known
Caltech-101 for the latter. The experimental results
spoke in favor of our approach, that performs better
than other commonly adopted solutions and showed
that the classification based on dictionary responses is
more effective than the one based on the reconstruc-
tion error. Also, classifying single features allowed
us to cope with cluttered background and occlusions
among objects. Adding a final classification step, as
an SVM, further improves the recognition rates, even
if the spatial information of objects are lost due to the
pooling operator.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
806
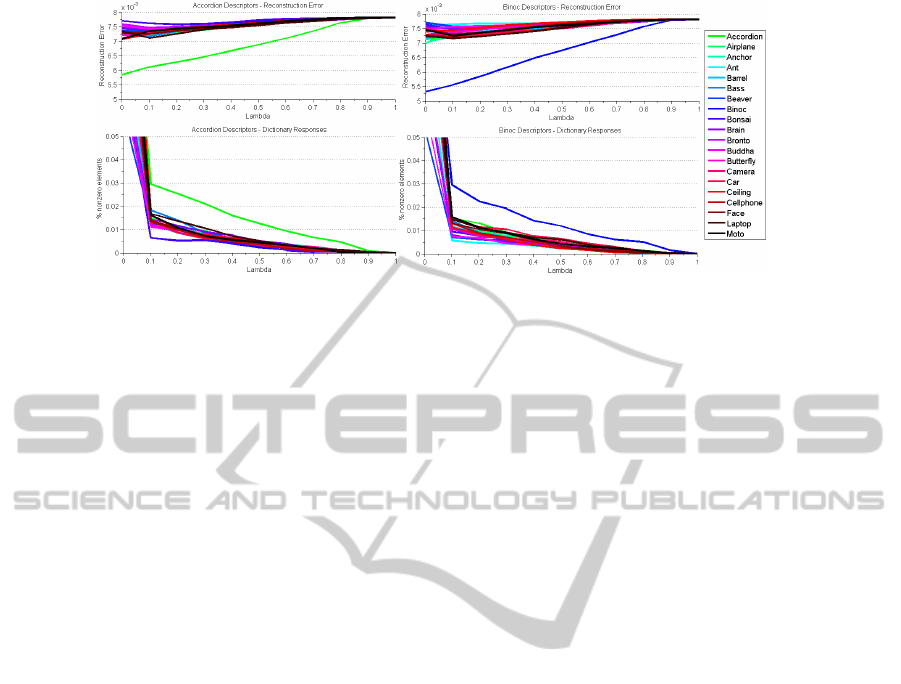
Figure 6: Examples of reconstruction error and percentage of nonzero codes for two objects from the Caltech-101 dataset
(object categorization task). Both the trends of the reconstruction error (above) and of the percentage of nonzero elements
(below) as the sparsity parameter increases show that the best performing alphabet is the correct one.
Future extensions of this work will consider the
design and the development of a method for part-
based object detection and recognition built on top
of our current achievements. The idea we are pur-
suing is based on building part related dictionaries
and exploiting the dictionary response classification
scheme for detection purposes and the temporal in-
formation. Our final goal is to overcome the common
sliding window approach for object localization, with
a more efficient part-based localization method.
REFERENCES
Bay, H., Ess, A., Tuytelaars, T., and Vangool, L. (2008).
Speeded-up robust features. CVIU, 110:346–359.
Boureau, Y.-L., Bach, F., LeCun, Y., and Ponce, J. (2010).
Learning mid-level features for recognition. In CVPR.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR.
Destrero, A., De Mol, C., Odone, F., and A., V. (2009). A
sparsity-enforcing method for learning face features.
IP, 18:188–201.
Fei-fei, L., Fergus, R., and Perona, P. (2006). One-shot
learning of object categories. PAMI, 28:594–611.
Hasler, S., Wersing, H., Kirstein, S., and K
¨
orner, E. (2009).
Large-scale real-time object identification based on
analytic features. In ICANN.
Hasler, S., Wersing, H., and Krner, E. (2007). A compari-
son of features in parts-based object recognition hier-
archies. ICANN.
Jia, Y., Huang, C., and Darrel, T. (2012). Beyond spatial
pyramids: Receptive field learning for pooled image
features. In CVPR.
Lee, H., Battle, A., Raina, R., and Ng, A. Y. (2007). Effi-
cient sparse coding algorithms. In NIPS.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. IJCV, 60:91–110.
Luenberger, D. G. (2008). Linear and Nonlinear Program-
ming. Springer.
Mairal, J., Bach, F., and Ponce, J. (2012). Task-driven dic-
tionary learning. PAMI, 34:791–804.
Mairal, J., Bach, F., Ponce, J., Sapiro, G., and Zisserman, A.
(2008a). Discriminative learned dictionaries for local
image analysis. In CVPR.
Mairal, J., Bach, F., Ponce, J., Sapiro, G., and Zisserman,
A. (2008b). Supervised dictionary learning. In NIPS.
Olshausen, B. A. and Fieldt, D. J. (1997). Sparse coding
with an overcomplete basis set: a strategy employed
by v1. Vision Research.
Peyr
´
e, G. (2009). Sparse modeling of textures. Journal of
Mathematical Imaging and Vision, pages 17–31.
Skretting, K. and Husy, J. (2006). Texture classification
using sparse frame based representation. EURASIP
Journal on Applied Signal Processsing.
Vapnik, V. (1998). Statistical Learning Theory. John Wiley
and Sons, Inc.
Viola, P. and Jones, M. (2004). Robust real-time face detec-
tion. IJCV, 57:137–154.
Wang, J., Yang, J., Yu, K., Lv, F., Huang, T., and Gong, Y.
(2010). Locality-constrained linear coding for image
classification. In CVPR.
Wersing, H. and K
¨
orner, E. (2003). Learning optimized fea-
tures for hierarchical models of invariant object recog-
nition. Neural Computation.
Yang, J., Wright, J., Ma, Y., and Sastry, S. (2008). Feature
selection in face recognition: A sparse representation
perspective. PAMI.
Yang, J., Yu, K., Gong, Y., and Huang, T. (2009). Linear
spatial pyramid matching using sparse coding for im-
age classification. In CVPR.
Yang, J., Yu, K., and Huang, T. (2010). Efficient highly
over-complete sparse coding using a mixture model.
In ECCV.
Multi-classImageClassification-SparsitydoesitBetter
807
