
A Robust 3D Shape Descriptor based on the Electrical Charge
Distribution
Fattah Alizadeh and Alistair Sutherland
School of Computing, Dublin City University, Dublin, Ireland
Keywords: 3D Model Retrieval, Charge Density Distribution, Shape Descriptor, Non-rigid Objects.
Abstract: Defining a robust shape descriptor is an enormous challenge in the 3D model retrieval domain. Therefore,
great deals of research have been conducted to propose new shape descriptors which meet the retrieving
criteria. This paper proposes a new shape descriptor based on the distribution of electrical charge which
holds valuable characteristics such as insensitivity to translation, sale and rotation, robustness to noise as
well as simplification operation. After extracting the canonical form representation of the models, they are
treated as surfaces placed in a free space and charge Q is distributed over them. Following to calculating the
amount of charge on each face of the model, a set of concentric spheres enclose the model and the total
amount of distributed charge between the adjacent spheres on the model’s surface generates the Charge
Distribution Descriptor (CDD). A beneficial two-phase description using the number of Charged-Dense
Patches for each model is utilized to boost the discrimination power of the system. The strength of our
approach is verified using experiments on the McGill dataset. The results demonstrate higher ability of our
system compared to other well-known approaches.
1 INTRODUCTION
Recent growth in the computer technology has
resulted in an increasing number of 3D models. 3D
scanners and cameras, 3D modelling software,
mobile phones and etc. are among the new
technologies which speed up the creation of these
models. Nowadays, thousands of models are
available in the domain-specific datasets. In
addition, the rapid developments of the internet have
hooked more attractions for retrieving 3D models
based on their contents. On the other hand, due to
the higher complexity of the models, annotating and
retrieving these models using text-based retrieving
systems is a non-trivial task. Consequently,
researches have drawn a particular attention to the
proposing new shape descriptors by which the
models can be searched, indexed and retrieved in a
beneficial manner.
During last decade, several shape descriptors for
model retrieval have been introduced and some of
them have a good retrieval quality (Kazhdan et al.,
2003); (Chen et al., 2003); (Lian et al., 2010). But
defining a robust shape descriptor to enhance the
retrieval quality especially for non-rigid objects and
partial matching is still a challenging area. A typical
constructive shape descriptor should be invariant to
the linear transformations such as the translation,
scale and rotation. Moreover, robustness to noise,
model deformations and simplifications are some
other characteristics which result in boosting the
retrieval ability.
In this paper, we propose a histogram-based
shape descriptor based on the distribution of
electrical charge which describes non-rigid objects
effectively. It is insensitive to the linear
transformations and some other modifications such
as noise and simplification. A two-phase describing
framework is utilized in order to defining models in
a more distinguishable manner.
We organize the rest of the paper as follows:
section 2 mainly dedicated to give a brief summary
of the related works. The proposed approach is
mainly discussed in the chapter 3. Experimental
results are presented in section 4 and finally in
section 5 we discuss our conclusion and the future
works.
2 RELATED WORKS
Research on the 3D model retrieval started less than
213
Alizadeh F. and Sutherland A..
A Robust 3D Shape Descriptor based on the Electrical Charge Distribution.
DOI: 10.5220/0004295502130218
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 213-218
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

2 decades ago. Since then, dozens of techniques
have been proposed most of which use shape
descriptors to represent the models in an informative
way. Based on the information used, they can be
classified into 4 main categories namely statistic-
based (Histogram-Based), Transform-based, Graph
based and view-based approaches. A beneficial
survey about the aforementioned approaches can be
found in the works by Bustos et al and Tangelder
and Veltkamp (Bustos et al., 2005); (Tangelder et
al., 2008).
Since our proposed descriptor lies in the first
category, in the sequel we provide a brief review of
available methods of statistic-base category.
2.1 Histogram-based Descriptors
In these approaches, a histogram which accumulates
the numerical values of a specific property is used to
represent the model features. Shape Distribution,
Shape Histogram, Extended Gaussian Images (EGI)
and Electrostatic Fields are only to name a few of
these techniques.
The Shape Distribution descriptor (Osada et al.,
2001) contains a set of functions based on geometric
measurements (e.g., angles, distances, areas, and
volumes) using some random points on the surface
of the 3D model. The accuracy of the appropriate
histograms could be altered by changing the number
of random points. Even though D2, one of their
functions, had better retrieval quality than the other
functions, generally speaking, none of the functions
have enough ability for describing 3D models. This
work was extended later by Ohbuchi et al (Ohbuchi
et al., 2003) by using quasi-random sequence of
numbers instead of pseudo-random sequences.
The shape histogram proposed by Ankerst et al
(Ankerst et al., 1999) has been evaluated in the
context of molecular biology and reached good
accuracy and performance. They decomposed the
3D models using one of these three techniques: Shell
model, Bin model and spider-web or combined
model. Their technique is not invariant to rigid
transforms and so they had to do pose-normalization
as a pre-processing step. Also, since the approach
proceeds with voxel data, 3D objects represented by
polygonal meshes need to be voxelised prior to
descriptor extraction.
The Extended Gaussian Image (EGI) is a
spherical histogram in which bins accumulate the
count of the spherical angles of the surface normal
per triangle, usually weighted by triangle area
(Zhang, et al., 2006). It is a histogram that records
the variation of surface area with surface orientation.
Later some extensions of the original EGI;
Complex-EGI and Volumetric-EGI were introduced
to enhance the original EGI especially for
differentiate between convex and non-convex shapes
without any pose normalization (Kang and Ikeuchi,
1997); (Horn, 1984).
Paquet et al (Paquet and Rioux, 1997); (Paquet et
al., 2000) exploited both the geometric features and
photometric properties such as cord, angle, colour,
reflection and texture. Their techniques are easy to
implement but since they only consider the global
property of the model, their proposed approach is
not very discriminative about objects details.
Recently, Mademlis et al employed electrostatic
fields to 3D model retrieval (Mademlis et al., 2008).
They considered the complete voxelised 3D model
as a distribution of electric charge. Changing control
parameters of descriptors enabled them to extract 24
histograms for each 3D model. Despite of robustness
with respect to object’s degeneracies and native
invariance under rotation and translation, their
descriptor is sensitive to non-rigid transforms.
Some other techniques have been proposed to
use histograms for 3D model retrieval such as
utilizing the Probability Distance Function (Akgul et
al., 2009) and distance function by the 3D Poisson
equation (Pan et al., 2011) which in addition to good
retrieval ability, they are robust to shape
perturbation and noise.
The main advantage of histogram-based
approach is their simplicity of implementation.
Almost all of the aforementioned methods are very
straightforward to implement and understand. And if
they are combined with the other methods as a pre-
processing step or active filter they can improve
their retrieval performance.
3 PROPOSED APPROACH
Our motivation for proposing the Charge
Distribution Descriptor (CDD) comes from a famous
fact in physics-electricity which says: “the electric
charges on the surface of conductor tend to
accumulate at the sharp convex areas and disappear
at the sharp concavity areas”.
We treat the 3D model as a conductor placed in a
free space (the space with no electric charge). Then,
a predefined electrical charge Q is distributed on the
surface of the 3D models. The amount of distributed
charges over each face of the model becomes the
descriptor of that face. Figure 1 illustrates the 6 steps
of our proposed approach.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
214

Figure 1: The proposed retrieval system.
To computing the charge distribution on the
triangular faces of 3D models we employed the
Finite Element Method (FEM) technique proposed
by Wu and Levin (Wu and Levin, 1997). Using the
Gauss’s law and conservation-of-charge fact, they
were able to calculate the charge distribution density
on the any arbitrary surface.
Since the charge distribution is calculated
regardless of coordinate systems, it is invariant to
the translation and rotation transformations but it is
not constant during resizing the models. So, we use
the amount of distributed charge (instead of charge
density) on the surface of each triangle. It is
insensitive to scale transformation and simply is
calculated via the underneath formula:
Chrgamnt
i
=chrgDns
i
*TriArea
i
, i=1,...,m (1)
where TriArea
i
and ChrgDns
i
are the area and
charge density of face i respectively and m is the
number of faces on the surface of each model.
Figure 2 shows four different coloured models
based on their charge distribution; the redder areas
indicate the surfaces holding more electrical charge.
As displayed in this figure, the sharper points
located in the convex areas have more electrical
charge than the other parts and vice versa.
Figure 2: Four coloured models from the McGill dataset;
the redder parts specify the denser faces.
3.1 Concentric CDD
In order to describe each model j, the N
s
concentric
spheres are drawn on the centre-of-mass of the
model. The radii of the spheres monotonically
increase to enclose the model entirely. The range of
radii should meet the following criteria:
min(d
j
) < R
k
< max(d
j
) , j=1,2,...,m (2)
Here d
j
is the distance of face from center-of-mass
and m is the number of faces on each model. The
sum of charge amount in each layer between two
adjacent spheres is assigned to each layer and the
N
s
-1 dimensional feature vector describes the whole
3D model. Figure 3 shows three different sample
models and their corresponding concentric spheres.
(Here Ns=4).
Figure 3: Three different models and their corresponding
concentric spheres.
It is important to note that the deformation of models
has significant effect on the amount of charge
distributed on the model surface located between
two adjacent spheres. To overcome this problem, we
use the canonical form
1
representation by which
non-rigid shape similarity problem can be mapped
into an easier problem of rigid similarity. To this
end, we utilize the Least-Square technique with the
CAMCOF algorithm. Since both of SAMCOF
algorithm and the geodesic distance extraction are
time consuming tasks, we first simplify all of the
models so that they have 2000 faces using the
MeshLab (MeshLab1.1.0, 2008). Later on in this
paper we show that the proposed descriptor is robust
to model simplification (see figure 6).
After simplification, geodesic distance extraction
and canonical form computation, the amount of
charge on each face of the simplified models is
computed. Figure 4 displays the results for three
different poses of a spectacles model; although the
poses are deferent but their canonical form
presentations and distribution of charge are quite
similar.
1
The canonical form is a bending-invariant representation in
which the geodesic distances are approximated by the Euclidian
ones (Elad-Elbaz and Kimmel, 2003).
OriginalModels
ModelSimplification
Canonical
Form
Extraction
ChargeDistribution
(DescriptionPhase1)
Concentric
Spheres
DensePatch
Extraction
(DescriptionPhase2)
Histogram
Generationand
Comparison
RetrievedModels
ARobust3DShapeDescriptorbasedontheElectricalChargeDistribution
215
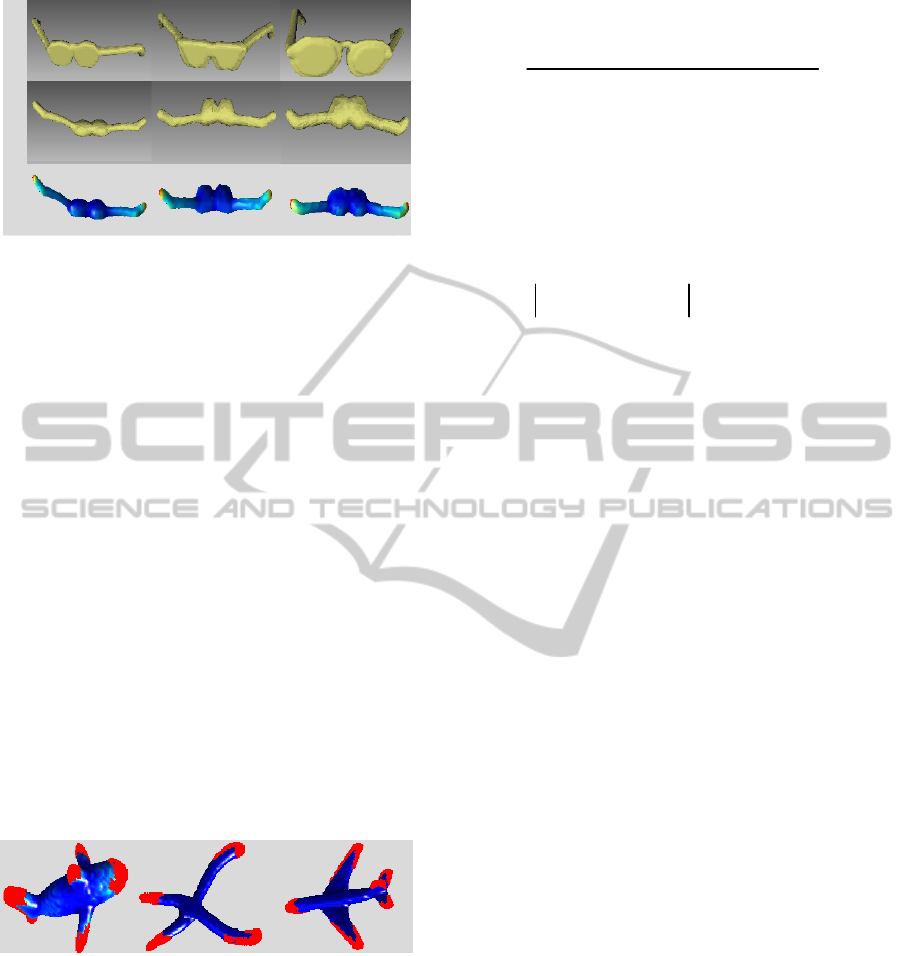
Figure 4: (a): Three different poses of a spectacle models,
(b): corresponding canonical forms and (c): distribution of
electrical charge.
3.2 Two-Phase Descriptor
In order to boost the retrieval quality, a two-phase
shape description framework is leveraged. To this
end, we extract the number of High-Density-Patches
(HDP) on the surface of each charged model and
utilize them to calculate the final dissimilarity
between the pairs of models. Each HDP includes a
local maxima point (a surface with higher electrical
charge than its neighbours) and a set of adjacent
faces on the model surface which have the charge
density more than a pre-defined threshold
τ. The
threshold τ is experimentally selected as shown in
Equation (3). Figure 5 shows some extracted dense
patches on the models based on the density
distribution:
τ = 0.3*max(ChrgDns
i
) , i=1,2,…,m (3)
Here m is the number of faces for each model and
chrgDns
i
is the charge density for face i.
Figure 5: Extracted dense patches on the surface of three
different models.
Testing our retrieval ability using the effect of the
HDP numbers for each model, we concluded that,
since the numbers of HDPs for most of the
articulated models are not constant, retrieving the
similar models based on the number of HDPs leads
to the lower ability of finding the similar models. To
solve this problem and balance the effect of HDP
numbers during the matching phase we assigned a
weight λ to each HDP which is defined using the
formula (4):
max( ) min( )
max(# ) min(# )
ChrgDis ChrgDis
HDP HDP
(4)
After calculating the dissimilarity measure between
each pair of models using the original CDD
descriptor, the weight factor λ is applied to extract
the final dissimilarity between two models i and j as
follows:
(, ) (, )
##*
ij
Dis i
j
chr
g
Dis i
j
HDP HDP
(5)
Where ChrgDis(.,.) is the dissimilarity measure
based on original CDD and #HDP
i
is the number of
High-Density-Patches on the model i.
4 EXPERIMENTAL RESULTS
We have tested our approach on the McGill dataset,
which is publicly available on the internet. It
consists of 458 models classified into 19 different
classes. (256 articulated models in 10 classes and
202 non-articulated models in 9 classes). Beside of
the retrieval quality of our descriptor, the robustness
to the simplification and noise are studied.
4.1 Robustness against Simplification
and Noise
As mentioned before, the introduced shape
descriptor is invariant to the linear transformations.
But we verify the robustness of it against some
geometry operations. We use the pictorial
presentation of models to show the effect of
transformations in the distribution of electrical
charge on the surface of the models. Figure 6
illustrates that the CDD descriptor proposed in this
paper is remains stable after the simplification and
noise; The original models in figure 6-(a) are
simplified from 20K faces into 3K in 6-(b). In
addition, a random noise is applied to the boundary
of original models in figures 6-(c).
Comparing the distribution of the electrical
charge for all of these modified models in figures 6
and 7 supports our claim that the CDD descriptor is
invariant to the aforementioned transformations; the
CDD descriptor’s histogram of these modified
models has small variations but they are still quite
similar. The reason for insensitivity to noise and
simplification can be explained as follows: as Wu
a)
b)
c)
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
216
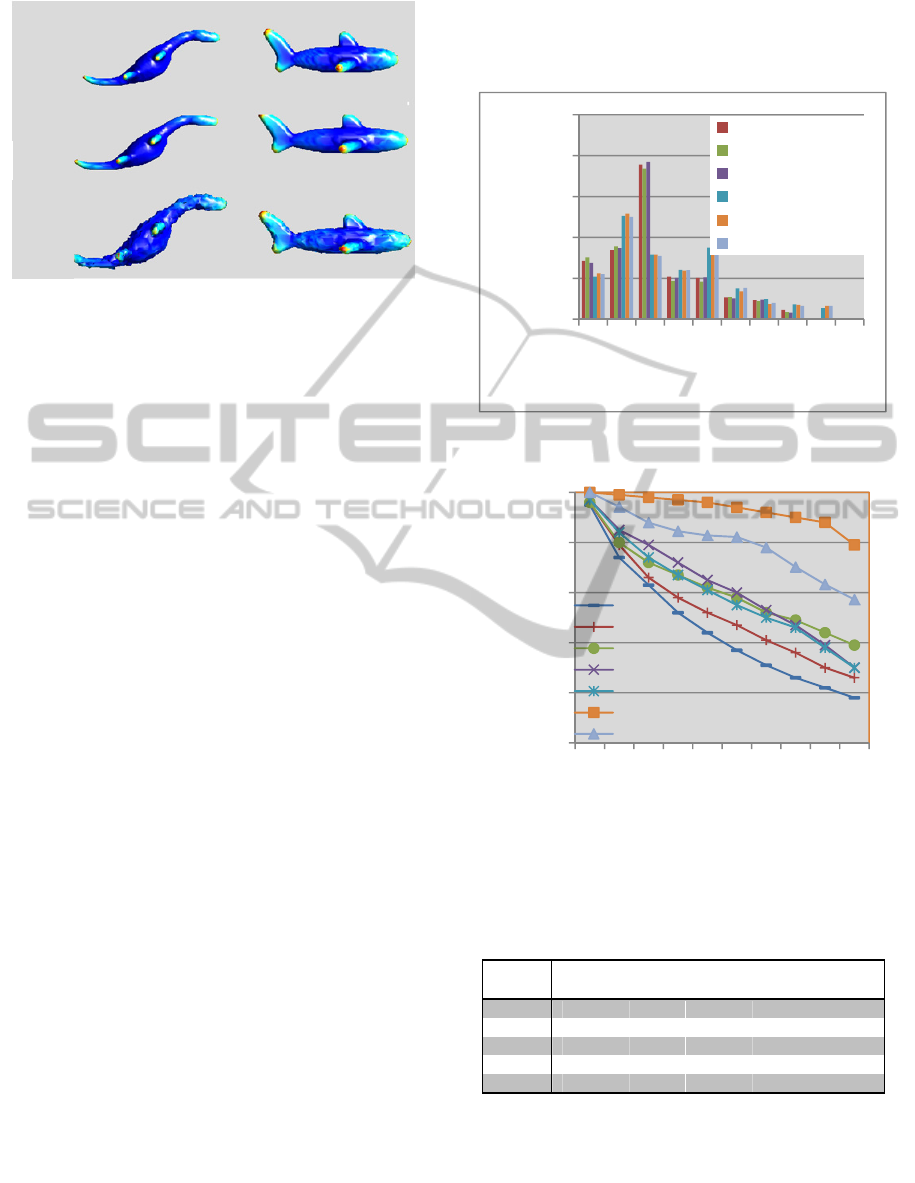
Figure 6: The original models and some modifications.
(a): original models, (b): simplified models, and (c): noisy
models.
and Levin charge on each face is contributed to by
all other faces. So, the small boundary changes
which are caused by noise and simplification have
almost no meaningful effects on the density. It is a
great advantage of our approach compared to the
curvature-based approaches (e.g. mean-curvature
and curvature-index); they are considerably affected
by any surface perturbations.
4.2 Algorithm Parameters
We tested several different options for number of
concentric spheres to enclose and describe the
models and observed some evaluation factors for
each one. The evaluation factors such as Nearest
Neighbour (NN), First Tier (FT), Second Tier (ST),
E-Measure, and Discounted Cumulative Gain
(DCG) in the following table shows that 20 spheres
is the best choice for the sphere counts.
4.3 Retrieval Ability
In order to verify the ability of our shape descriptor
the Precision-Recall plot is employed to compare
our system with 6 other well-known approaches.
These approaches are MDS-CM-BOF (Lian et al.,
2010), D2 (Osada et al., 2001), G2 (Mahmoudi and
Sapiro 2009), GSMD (Papadakis et al., 2007), SHD
(Kazhdan et al., 2003) and LFD (Chen et al. 2003).
As mentioned in (Lian et al., 2011), the MDS-CM-
BOF descriptor is one the state-of-the-art approaches
which showed the great ability in the SHREC’11
contest. Furthermore, The LFD had the best quality
comparing to the other 12 descriptors in (Shilane et
al., 2004).
As depicted in figure 8, thanks to specific
matching scheme (the Clock Matching scheme), the
MDS-CM-BOF descriptor is the best one, and our
approach ranked second. The figure shows that our
approach provides the higher retrieving quality than
other 5 approaches by far.
Figure 7: The CDD histograms of models in figure 6.
Figure 8: The Precision-Recall plot for our and 6 different
other methods.
Table 1: Evaluation factors for different number of
concentric spheres in the Concentric-CDD method.
Sphere
Count
NN FT ST E DCG
5
0.7212 0.3414 0.4710 0.4012 0.6337
10
0.8563 0.4940 0.6359 0.4719 0.8172
20
0.8812 0.6052 0.7744 0.5019 0.8461
50
0.7375 0.4803 0.6433 0.4735 0.7968
200
0.4063 0.2641 0.3805 0.2879 0.5868
5 CONCLUSIONS
A robust shape descriptor introduced in this paper
describes the 3D models based on the distributions
0
0,1
0,2
0,3
0,4
0,5
12345678910
OccurrenceProbability
BinNumber
NormalDolphin
NoisyDolphin
SimplifiedDolphin
NormalFourleg
NoisyFourleg
SimplifiedFourleg
0
0,2
0,4
0,6
0,8
1
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1
Precision
Recall
D2
SHD
G2
LFD
GSMD
MDS‐CM‐BF
Concentric‐CCD
a)
b)
c)
ARobust3DShapeDescriptorbasedontheElectricalChargeDistribution
217

of electrical charge over the triangular faces of each
model. In addition to the distribution of charge, a
beneficial two-phase description mechanism is also
utilized in order to describe models in a more
distinguishing manner; the number of High-Density-
Patches on each model enabled us to boost the
retrieval quality. Experimental results show that the
proposed descriptor is invariant to the linear
transformations as well as some geometry
operations. In the next step of our work, we try to
adjust our descriptor to support partial matching.
REFERENCES
R. Osada, T. Funkhouser, B. Chazelle and D. Dobkin.,
2001. “Matching 3D Models with Shape
Distribution”. Proc. Shape Modeling Int’l.
Ohbuchi R, Minamitani T, Takei T., 2003. “Shape
similarity search of 3D models by using enhanced
shape functions”. Proceedings of Theory and Practice
in Computer Graphics 2003, Birmingham, UK.
Ankerst, M., kastenmuller , G., kriegel, H.-P., and Seidl,
T., 1999. “3D shape histograms for similarity search
and classification in spatial databases”. In Proceedings
of SSD.
Jiqi Zhang, Hau-San Wong and Zhiwen Yu., 2006. “3D
model retrieval based on volumetric extended
Gaussian image and hierarchical self organizing map”.
MM'06, Santa Barbara, California, USA, pp. 121-124.
S. Kang and K. Ikeuchi, 1997. "The Complex EGI: New
Representation for 3-D Pose Determination," IEEE
Trans. Pattern Analysis and Machine Intelligence, vol.
15, no. 7, pp. 707-721.
B. K. P. Horn, 1984. "Extended Gaussian images," Proc.
IEEE, vol. 72, no. 12, pp. 1656-1678.
E. Paquet , M. Rioux, 1997. Nefertiti: a query by content
software for three-dimensional models databases
management, Proceedings of the International
Conference on Recent Advances in 3-D Digital
Imaging and Modeling, p.345, May 12-15.
E. Paquet, M. Rioux, A. Murching, T. Naveen and A.
Tabatabai, 2000. “Description of Shape Information
for 2-D and 3-D Objects”, Signal Processing: Image
Communication, 16: 103–122.
A. Mademlis P. Daras D. Tzovaras2 M.G. Strintzis, 2008.
“3D object retrieval based on resulting fields”,
Eurographic workshop on 3D model Rertrieval.
Akgul CB, et al. 2009. “3D model retrieval using
probability density-based shape descriptors”. IEEE
Trans Pattern Anal Machine Intelligence 31(6):1117–
1133.
Pan X, You Q, Liu Z, Liu Z, Chen Q, 2011. “3D shape
retrieval by Poisson histogram”, pattern recognition
letters, 32(3): 787-794.
M. Kazhdan, T. Funkhouser, S. Rusinkiewicz, 2003.
“Rotation invariant spherical harmonic representation
of 3D shape descriptors” In: Proceedings of the
ACM/Eurographics Symposium on Geometry
Processing p. 167–75.
Chen, D.-Y., ouhyoung, M., Tian, X.-P., and Shen, Y.-t.,
2003. ”On visual similarity based 3D model retrieval”.
Computer Graphics Forum, 223—232.
Shilane, P., Min, P., Kazhdan, M., and Funkhouser, T.,
2004. “The princeton shape benchmark”. In Shape
Modeling International.
Zhouhui Lian , Afzal Godil , Xianfang Sun, 2010. “Visual
Similarity Based 3D Shape Retrieval Using Bag-of-
Features”, Proceedings of the 2010 Shape Modeling
International Conference, p.25-36, June 21-23.
Z. Lian, et al., 2011. “Shape Retrieval on Non-rigid 3D
Watertight Meshes”, Proc. Eurographics/ACM
SIGGRAPH Symp. on 3D Object Retrieval.
S. P. P. Papadakis, I. Pratikakis and T. Theoharis, 2007.
“Efficient 3D Shape Matching and Retrieval Using a
Concrete Radialized Spherical Projection
Representation”, Pattern Recognition, vol. 40, no. 9,
pp.2437-2452.
Wu K., Levine M., 1997. “3D part segmentation using
simulated electrical charge distributions”. IEEE
transactions on pattern analysis and machine
intelligence 19, 11 , 1223–1235.
A. Elad-Elbaz and R. Kimmel, 2003. “On Bending
Invariant Signatures for Surfaces,” IEEE Trans.
Pattern Analysis and Machine Intelligence, vol. 25, no.
10, pp. 1285-1295.
MeshLab1.1.0, meshlab.sourceforge.net 2008.
M. Mahmoudi and G. Sapiro, 2009. “Three-dimensional
Point cloud Recognition via Distributions of
Geometric Distances”. Graphical Model Vol.71, pp
22-31.
Bustos B, Keim D. A, Saupe D, Shrec T, Vranic D. V,
2005. Feature-based similarity search in 3D object
databases. ACM Comput Surv 37:345–387.
Johan W. Tangelder , Remco C. Veltkamp, 2008. A
survey of content based 3D shape retrieval methods,
Multimedia Tools and Applications, v.39 n.3, p.441-
471.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
218
