
A Hybrid Metaheuristic for the Bus Driver Rostering Problem
Vítor Barbosa
1,2
, Ana Respício
2,3
and Filipe Alvelos
4,5
1
Escola Superior de Ciências Empresariais, Instituto Politécnico de Setúbal, Setúbal, Portugal
2
Centro de Investigação Operacional, Faculdade de Ciências da Universidade de Lisboa, Lisboa, Portugal
3
Departamento de Informática, Faculdade de Ciências da Universidade de Lisboa, Lisboa, Portugal
4
Departamento de Produção e Sistemas, Universidade do Minho, Braga, Portugal
5
Centro Algoritmi, Universidade do Minho, Braga, Portugal
Keywords: Hybrid Metaheuristic, Column Generation, Genetic Algorithms, Rostering.
Abstract: This paper presents a new decomposition model for the Bus Driver Rostering Problem and proposes the
hybridization of column generation and genetic algorithms to achieve good quality rosters in short time. The
decomposition model is based on the definition of a subproblem for each driver, which is responsible for the
creation of valid work-schedules for the rostering period. Column generation is used to obtain an optimal
linear solution. This solution and the subproblems’ solutions obtained during the column generation are then
used by the genetic algorithm to find good quality combinations of drivers’ schedules, i.e. good quality
rosters. Computational tests show the efficiency and effectiveness of the proposed approach.
1 INTRODUCTION
Rostering consists in defining the “work-schedule”
for each of the workers in a company for a given
period. A roster is a plan presenting the work-
schedules for all workers. A work-schedule defines,
for each day, if the worker is assigned to work or has
a day-off and, in the first case, which daily task has
to be performed. The Rostering Problem arises
because the company usually has diverse tasks to
assign on each day, sometimes needing particular
skills, and on the other hand, the labour and
company rules (days-off, rest time, etc.) restricts the
blind assignment of tasks to workers.
Rostering is addressed in many types of business
as surveyed in (Ernst et al., 2004). A particular
attention has been paid to nurse rostering (Burke et
al., 2004); (Moz and Pato, 2007) and airline crew
rostering (Kohl and Karisch, 2004).
In this paper we consider the Bus Driver
Rostering Problem (BDRP). The literature about the
BDRP is short (Moz et al., 2009). In fact, most of
the papers focusing the bus drivers rostering address
both rostering and shift scheduling as in (De Leone
et al., 2010); (Dorne, 2008); (Rodrigues et al., 2006),
where, before the rostering phase, there exists a
phase where the shift/duties are built by defining the
sequence of trips and rest time of each bus and only
after the driver is assigned. In (Wren, 1996) the
distinctions and similarities between scheduling,
timetabling and rostering are discussed.
In this paper we consider the BDRP as described
in (Moz et al., 2009), where it is assumed that the set
of tasks (duties) to assign in each day are already
defined by aggregating sets of consecutive trips and
rest times. For each task, the start time and total
duration should be considered to avoid the
assignment of invalid consecutive tasks (according
to labour rules), respect the maximum work time
allowed and obtain the amount of paid overtime.
The BDRP and most rostering problems are NP-
Hard combinatorial optimization problems (De
Leone et al., 2010); (Dorne, 2008); (Moz et al.,
2009), being computationally hard to obtain optimal
solutions. To avoid the computational burden to
achieve solutions by using exact methods, many
authors approach the problem with heuristic
methods which are usually faster in the achievement
of good solutions. Examples of the use of non-exact
methods can be found in (Burke et al., 2003); (De
Leone et al., 2010); (Lučić and Teodorović, 2007);
(Moz et al., 2009); (Ruibin et al., 2010).
We propose a non-exact method to address the
BDRP where the column generation (CG) method
(Barnhart et al., 1998); (Dantzig and Wolfe, 1960);
(Desaulniers et al., 2005); (Desrosiers et al., 1984)
230
Barbosa V., Respício A. and Alvelos F..
A Hybrid Metaheuristic for the Bus Driver Rostering Problem.
DOI: 10.5220/0004283700320042
In Proceedings of the 2nd International Conference on Operations Research and Enterprise Systems (ICORES-2013), pages 32-42
ISBN: 978-989-8565-40-2
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)

and a genetic algorithm (GA) (Holland, 1992);
(Mitchell, 1996); (Reeves, 1997) are combined to
obtain good quality rosters in short time.
We present an integer programming model
adopted for the BDRP, named compact model
because the growth of the number of constraints and
variables when the size of the problem increases is
bounded by a polynomial. We also present a
decomposition model resulting from grouping
blocks of independent constraints (related to a single
driver) of the compact model into independent
subproblems and connecting them in a restricted
master problem where the variables represent valid
driver work-schedules, obtained by solving the
subproblems. Column generation is used to obtain a
linear combination of solutions where all tasks are
assigned. All the information generated during the
CG process is used as a base for the GA. An
individual (chromosome) represents a roster where
each gene represents a driver according to the locus
and the value of the gene (allele) identifies a
subproblem solution (driver schedule). The linear
solution may also be used to identify the
subproblems’ solutions included in the optimal
linear solution, allowing the inclusion of part of
these solutions in the population used by the GA.
In the first section we present the BDRP, the
compact model as well as the decomposition model
whose linear relaxation will be solved by CG. The
second section presents the solution strategies
focusing in the presentation of the SearchCol
framework (Alvelos et al., 2010); (Alvelos et al.,
2013) which allows the search on the column by
diverse heuristic methods in addition to the GA. The
third section presents details about the
implementation of the decomposition model in the
framework and explains the GA operation. Some
results showing the behaviour of the GA as search
method are presented in section four. The last
section offers some concluding remarks.
2 THE BUS DRIVER ROSTERING
PROBLEM
The Bus Driver Rostering Problem (BDRP) consists
of defining the work-schedule for all drivers for a
rostering period, fulfilling all tasks on each day and
respecting the labour rules.
In this section we present the integer
programming model adopted for the BDRP, the
compact model, and the corresponding decompo-
sition model resulting from the application of the
Dantzig-Wolfe decomposition (Dantzig, 1963);
(Dantzig and Wolfe, 1960). This decomposition
model meets the requirements of SearchCol
framework which combines column generation and
metaheuristic (MH) search, as described in (Alvelos
et al., 2010); (Alvelos et al., 2013).
2.1 Compact Model
The compact model for the BDRP was derived from
the one presented in (Moz et al., 2009). In our case,
we only consider one objective function to minimize
the total cost of the roster, resulting in the removal
of the constraints related with the minimization of
the number of drivers used without complete
schedules.
We consider a rostering horizon of four weeks
(28 days). The parameters and the variables used in
the model are:
– The set of drivers available to perform tasks;
– Cost paid to driver for each time unit
of extra work. This cost allows the distinction of
different salary categories of workers, ;
– Fixed cost paid for using a driver (equal for
all drivers). The cost is not applied if the driver has
no tasks assigned during the rostering period (his
schedule is filled up with consecutive days off);
g – Maximum number of consecutive days
without a day-off;
– Set of tasks on day h that must be assign to
a driver (this set does not include the “special” task
that represents a day-off), h=-g+1,…,0,1,…,28;
– Set of tasks to be assigned on day h
(includes the “special” task that represents the driver
day-off, which is the last one on each subset
corresponding to a day), h=-g+1,…,0,1,…,28;
– Set of tasks which can be assigned to driver
( on day h if he does task i on the previous day
(h-1). Due to minimum rest periods, depending on
the start-time and end-time of the tasks, they are
considered “early tasks” and “late tasks”, and an
early task cannot succeed immediately a late task,
,
, h=1,…,28;
– Duration (in time units) of task i on day h,
, h=1,…,28;
̅
– Contractual daily work time (limit over wich
the work is considered overtime);
′
– Overtime time units of task i on day h,
results from max {0,
̅
},
, h=1,…,28;
– Maximum total assigned work time (in time
units) in each week of the rostering period;
– Maximum total assigned work time (in time
units) in all the rostering period;
AHybridMetaheuristicfortheBusDriverRosteringProblem
231

– Minimum number of Sundays with day-off
assigned to each driver during all the rostering
period;
– Minimum number of days-off assigned to
each driver in each week of the rostering period;
q – Number of work days where work tasks
should be assigned (tasks from
) to get a
complete schedule to the driver. The remaining days
of the rostering period are filled with the mandatory
days-off;
– Assumes value 1 if driver v was assigned
to task i on the last day of the previous rostering
period, otherwise it has value 0, ,
;
– Number of consecutive work days (without
any day-off) the driver v did after the last day-off in
the previous rostering period, ;
– Index of the “special” task which represents
the day-off (always the last task in the sets where the
task appears);
– Binary decision variable representing if the
task i from day h is assigned to driver v, assuming
the value 1 if true, 0 otherwise,,
,
h=1,…,28;
– Binary decision variable representing the
use of the driver v in the rostering. The variable
assumes the value 1 if at least one work task is
assigned to driver v, 0 otherwise,.
Based on these parameters and decision variables
the compact integer programing model is:
∑∑∑
∈
(1)
Subject to:
∑
1
∈
, ∈
, 1, … ,28,
(2)
∑
1
∈
, , 1, … ,28,
(3)
,
∑
1
∈
\
, , ∈
, 2, … ,28,
(4)
∑
1
∈
\
, , ∈
,
(5)
∑∑
,
, , 1, … ,28 ,
∈
(6)
∑∑
∈
,,
(7)
∑
, , 1, … ,4,
(8)
∑
,
,,
(9)
∑∑
∈
, , 1,…,4,
(10)
∑∑
∈
,,
(11)
∑∑
∈
q
0
,,
(12)
∈
0,1
, , ∈
, 1, … ,28.
(13)
∈
0,1
,
(14)
The objective function (1) minimizes the sum of the
overtime costs drivers and the fixed costs by using
drivers. Constraints (2) assure that each task from
each day is assigned to one, and only one, driver
from the set of drivers. Constraints (3) assure that
each driver has one task assigned in each day of the
rostering period (which can be the “special” task
representing the day-off). Constraints (4) and (5)
prevent the assignment of incompatible sequences of
tasks in the schedule of a driver (avoid the
assignment of an early task after a late task).
Constraints (4) consider the first day of the rostering
period, where data from the last day from previous
rostering period are needed. Constraints (5) consider
the following days. Constraints (6) and (7) prevent
the assignment of work tasks in more than g
consecutive days (maximum number of work days
without a day-off). Constraints (7) consider the
initial days of the rostering period where information
from the previous period is considered in the
constraints. Constraints (8) force the assignment of
at least d
w
days-off (“special” task with index in
each week of the rostering period. Constraints (9)
force the assignment of at least d
s
days-off on
Sundays during the rostering period. Constraints
(10) prevent, in each week, the assignment of tasks
with a total duration exceeding b1, the week limit
defined by labour rules. Constraints (11) prevent the
assignment of a complete schedule with a total
duration exceeding b2, the total work time limit
defined contractually for the rostering period.
Constraints (12) force the binary variable
to be
set to 1 if at least one work task is assigned to driver
v in the rostering period, the variable is set to 0 if the
driver schedule is filled with days-off (meaning that
driver v is not used). Constraints (13) and (14)
define the variables
and
, respectively, as
binary variables.
2.2 Decomposition Model
Considering the previously presented compact
model, it is easy to observe that almost all the
constraints make use of variables for a single driver
and only constraints (2) aggregate variables
corresponding to all drivers. Neglecting constraints
(2), we have one independent problem for each
driver. This fact justifies the decomposing of the
compact model “by driver”.
We obtain the following model for the
subproblem of a generic driver v. Note that the
objective function takes into account the dual
variables of the constraints of the master problem –
to be introduced below.
ICORES2013-InternationalConferenceonOperationsResearchandEnterpriseSystems
232

Subproblem formulation for driver v (SP
v
):
∑∑
∈
(15)
Sub
j
ect to:
∑
1
∈
, 1, … ,28,
(16)
,
∑
1
∈
\
, ∈
, 2, … ,28,
(17)
∑
1
∈
\
, ∈
,
(18)
∑∑
,
, 1, … ,28 ,
∈
(19)
∑∑
∈
,
(20)
∑
, 1,…,4,
(21)
∑
,
,
(22)
∑∑
∈
,1,…,4,
(23)
∑∑
∈
,
(24)
∑∑
∈
q0
,
(25)
∈
0,1
, ∈
, 1,…,28,
(26)
∈
0,1
;
(27)
Where:
- Binary variable representing if task i from
day h is assigned to driver associated with this
subproblem, assuming the value 1 if true, 0
otherwise,
, h=1,…,28;
- Binary variable representing the use of the
driver associated with this subproblem. The variable
assumes the value 1 if at least one work task is
assigned to driver, 0 otherwise (schedule full of
days-off);
– Cost paid to driver v for each time unit of
extra work;
– Dual variable associated to the linking
constraint of task i of day h (constraints (29) from
the RMP);
– Dual variable associated to the convexity
constraint (constraint (30) from the RMP) inserted in
the restricted master problem associated with this
subproblem (driver v);
– Subset of
(defined in the compact
model) related to the subproblem driver v;
– Number of consecutive work days (without
day-off) the subproblem driver did after the last day-
off in the previous rostering period;
– Assumes value 1 if subproblem driver was
assigned to task i on the last day of the previous
rostering period, otherwise it has value 0,
;
All other parameters remain the same as in the
compact model.
Considering the subproblem model (SPv), the
compact model can be rewritten considering the
convex combination of the extreme points resulting
from the subproblems’ solutions, leading to a master
problem (MP) that considers all possible columns.
Without loss of generality, we can assume that the
set of columns to be considered is known, thus
resulting in the following restricted master problem
(RMP).
RMP formulation:
∑∑
∈
∑∑
∑
(28)
Sub
j
ect to:
∑∑
1
∈
,
,
1, … ,28,
(29)
∑
1,,
(30)
0,1
,
,,
(31)
0
1,
, 1, … ,28, (32)
0
1,
, 1, … ,28, (33)
0
1,, (34)
0
1, (35)
Where:
– Variable associated to the schedule j of
driver v;
,
– Artificial variables associated to the
linking constraint (for task i on day h) to make the
problem possible until the first convex combination
of extreme points is achieved by the column
generation;
,
– Artificial variables associated to the
convexity constraint (for subproblem/driver v) to
make the problem possible until the first convex
combination of extreme points is achieved by the
column generation;
– Set of schedules for driver v generated by
column generation;
– Cost of the schedule j obtained from the
subproblem of driver v;
– Assumes value 1 if task i of day h is
assigned in the schedule j of driver v;
M – Very big value used to penalize the use of
artificial variables in the solution of the restricted
master problem.
The linking constraints (29) and convexity
constraints (30) have dual variables
and
,
respectively, which are present in the objective
function of the subproblem.
The linking constraints (29), as was the case in
the corresponding constraints from the compact
model (2), assure that all the tasks are assigned.
AHybridMetaheuristicfortheBusDriverRosteringProblem
233

Since the variables on the RMP are linear, the
solution of the RMP can share a task among multiple
drivers, but the sum of the columns including that
task should be 1.
3 SOLUTION STRATEGIES
Given the models presented in the previous section,
we now present methods used to obtain the optimal
integer solution, integer solutions (approximate) and
linear solutions with better lower bounds than the
direct linear solution.
3.1 Optimal Integer Solution
The most direct way to obtain the optimal integer
solution for the BDRP is by solving the compact
model using branch and bound through efficient
software implementation like CPLEX (ILOG, 2009).
As stated in (Moz et al., 2009), the bus rostering
problem is classified as NP hard and computational
tests previously completed by the authors shown that
it takes a considerable amount of time to obtain
optimal solutions. In part of the instances the time
limit (four hours) was achieved without proving the
optimality of the solution found. We also tested to
directly solve some instances and the behaviour was
the same, the solver faced difficulties to prove
optimality before the test time limit defined.
3.2 Hybrid Metaheuristic
The core of our research is to find good solutions
through the hybridization of column generation and
metaheuristics, as proposed in (Alvelos et al., 2010)
using the SearchCol framework. The SearchCol
framework proposes the use of metaheuristics to find
good combinations of the subproblem solutions
(schedules) generated during the column generation
method considering the linear optimal solution of the
restricted master problem as an indicator of the
quality of each column in the search space.
This framework provides the possibility of
running multiple times the CG with new constraints
to force the generation of new schedules with
unassigned tasks.
The framework concept, details about the
implementation, search spaces and solutions
representation after the column generation are
presented in (Alvelos et al., 2013). The overview of
the search for solutions within the framework
follows the high-level algorithm in Figure 1:
1: Column generation
2: Search
3: repeat {
4: Set column generation perturbation
5: Optimize perturbed column generation
6: Search
7: } until Stopping criterion fulfilled
Figure 1: SearchCol general algorithm.
In step 1 of the algorithm (Figure 1), it is
possible to obtain lower bounds to the linear solution
of the problem better than those obtained from the
compact model, which is a well-known
characteristic of the Dantzig-Wolfe decomposition
reformulated models (Lübbecke and Desrosiers,
2005). These lower bounds are important in the
enumeration methods (like branch and bound) used
to obtain optimal integer solutions since they are the
reference to evaluate the need to explore branches of
the search tree (reducing the search) and also the
reference to calculate the gap between the integer
and the linear solutions.
In step 2 of the algorithm, it is possible to obtain
integer solutions by selecting one solution from each
subproblem, satisfying the linking constraints. A
possible strategy is to round up the linear values of
the optimal RMP solution, however that solution
will assign the same task to more than one driver (in
our problem) every time the linking constraint has
more than one variable with nonzero value.
After the column generation, the variables
associated with the columns may be set of type
integer and the resulting MIP can be optimized by
branch and bound in order to obtain the best
available integer solution on the new search space
(the set of columns generated by CG). If this new
search space contains a considerable number of
admissible solutions for each subproblem, this
process is very time consuming.
The idea behind SearchCol is the use of heuristic
search methods to select the columns (solutions of
the subproblems) which should integrate the integer
solution. Currently, the framework has as methods
(metaheuristics), among others, multi-start local
search (MSLS) and variable neighborhood search
(VNS) to improve a single solution. We now
integrate genetic algorithms as the search method,
being the first population based metaheuristic
implemented in the SearchCol framework.
Our contribution is the integration of a new
problem in the SearchCol framework and the
development of a new “Search” phase (steps 2 and
6) which can be used by most of the other problems
solved using this framework. The next section
ICORES2013-InternationalConferenceonOperationsResearchandEnterpriseSystems
234

presents the details on the integration of the new
problem and on the new search method.
4 IMPLEMENTATION
This section presents details about how the
decomposition model presented in section 0 was
implemented in the SearchCol framework and how
the genetic algorithms were used to explore the
search space resulting from the column generation.
4.1 Implementing the Decomposition
Model
To integrate the new problem in the Searchcol
framework we defined a new class (BDRostering)
responsible to store all the parameters used in the
decomposition model and offering methods that
allow for reading the instances from files and
mapping the data to the correct variables in the class.
The BDRostering class is used as base class to
another class (DecBDRostering) which also inherits
from class Decomposition (part of SearchCol
framework) where the methods needed to implement
are defined and given access to internal
implementation of the RMP and subproblems
implementation.
The class DecBDRostering needs to implement a
set of methods used by the framework to:
- define the decomposition, create all the
subproblems, define the linking constraints on the
RMP and the matrix with their coeficients used to
define columns, etc;
- update the subproblems objective function costs
in each CG iteration;
- construct the new column added to the RMP
from the subproblem solution;
- optimize the subproblems.
The methods implemented on the
DecBDRostering are those where knowledge about
the problem/decomposition is needed, all the
algorithm steps were already implemented within
the base class (and other classes) of the framework.
4.2 Search Columns with Genetic
Algorithms
The conclusion of the column generation process
gives us two main sources of useful information to
build valid solutions for the rostering problem:
- The first one is the set of columns added to the
RMP. We know that each one corresponds to a valid
schedule for a given driver;
- The second one is the optimal solution of the
RMP. Even being a fractional solution, the selection
of columns used in that solution can be set as the
primary search space to explore in the search of
good integer solutions. The value of the variable
associated to each column can be seen as an
indicator of the quality of that column, if the
variable is close to one it means the solution
associated to the corresponding driver should be
tried in the rostering. The optimal solution value is
also the lower bound to consider in the search of
valid integer solutions.
Given the set of valid schedules to each driver
(column generated by corresponding subproblem), a
roster consists in the selection of a schedule to all
drivers of the bus company. The only remaining
constraint is the one that forces the accomplishment
of all the tasks, which is not achieved by randomly
selecting a schedule to each driver. The challenge is
to find combinations of schedules that assign all the
tasks while minimizing the total rostering cost.
4.2.1 Genetic Algorithms Integration
The use of Genetic Algorithms (GA) (Holland,
1992); (Mitchell, 1996); (Reeves, 1997) as the
metaheuristic used in the “Search” phase of the
SearchCol global algorithm arises naturally since the
resemblance of the solution representation used and
the chromosomes present in the GA.
C1 C7 C23 … C10
Driver 1 Driver 2 Driver 3 … Driver n
Figure 2: Roster solution representation as a chromosome.
As presented in Figure 2, a roster can be
considered a chromosome with n genes, where each
allele is the identification of a driver schedule
selected from the set of valid schedules (columns
added from the corresponding supbroblem solution)
generated by the column generation iterations. In
order to create a new chromosome representing a
roster each gene must be filled with the
identification of a solution generated by the driver
subproblem corresponding to that gene locus. In the
iterations of the column generation, every time a
subproblem solution is considered attractive to be
added as a new column, the original solution is
saved with data from which subproblem produced
the solution and the column added (column order
number) to the RMP. Keeping this information
updated, at the end of column generation, we may
consider we have virtual pots (as illustrated in
AHybridMetaheuristicfortheBusDriverRosteringProblem
235
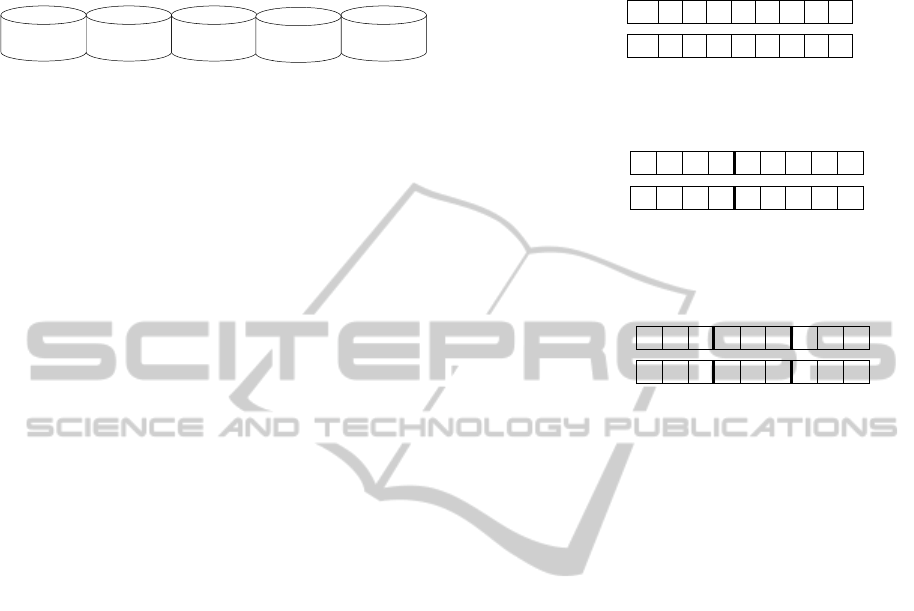
Figure 3) for each driver, with valid solution inside,
from where we can pick a solution with the
guarantee that it is a valid solution for the driver.
Figure 3: Valid schedules pots for each driver.
4.2.2 GA Initial Population Generation
The GA rely on the existence of a population (Pop)
of individuals where the GA operators are applied in
order to evolve through generations.
We need to create populations assuring a good
dispersion of the individuals on the search space. To
reach that target, we cannot focus only in the
solutions that integrate the optimal solution of the
RMP at the end of column generation (assumed of
good quality) but also explore the others solutions.
The SearchCol framework already provides a set
of distinct methods to create global solutions
(individuals) where those different scenarios are
considered. All available methods, detailing the
solutions considered for selection in each one, are
detailed in (Alvelos et al., 2013).
Since those methods are already available and
we need diversity on the individuals integrating the
population, we have created a set of parameters to
define the percentage of individuals generated by
each method in the initial population of the GA,
easily allowing changes/trials at runtime.
4.2.3 GA Operators
The evolution of populations is achieved by
selecting the best individuals to integrate the mating
pool (MP) and applying over those individuals the
variation operators commonly used in the GA, the
crossover operator and the mutation operator.
The method we are using as selection operator is
the tournament. We randomly select pairs of
individuals and compare them using a bi-level
evaluation function (presented below). The one with
lower infeasibility is selected. If both have the same
infeasibility, the evaluation function that calculates
the value of the original objective function is used to
select the best one.
The crossover operator is used to generate
offspring that share characteristics from both
parents. Usually the operator creates the offspring by
selecting subsequences of genes alternatively from
both parents. Our current implementation has two
implementations of commonly used crossovers: the
one point crossover and the two point crossover.
Considering the following parents for an instance
with 9 drivers:
Parent 1: 1 7 23 4 5 9 20 38 10
Parent 2: 11 22 8 26 29 17 13 31 25
Applying the one point crossover, considering
the point between the fourth and the fifth genes,
results in:
Offspring 1: 1 7 23 4 29 17 13 31 25
Offsprin
g
2: 11 22 8 26 5 9 20 38 10
Applying the two point crossover, considering
the first point between the third and the fourth genes
and the second point between the sixth and the
seventh genes, results in:
Offsprin
g
1: 1 7 23 26 29 17 20 38 10
Offspring 2: 11 22 8 4 5 9 13 31 25
The mutation operator is used to change an
individual by randomly modifying one or more
genes. This operator produces a small dispersion on
the search space avoiding the stagnation in local
optimums. Currently, when mutation is applied, each
locus is drawn to be changed and, if selected, the
selected gene is replaced by another allele, chosen
from the pot of solutions of the subproblem
associated to that position/driver.
4.2.4 Evaluation of Individual
One of the important pieces of the GA is the
function used to evaluate an individual in such a way
that the result can be used to compare two or more
individuals and identify which is better and which is
worst. The definition of good evaluation functions is
very important since the result is often used to
decide the inclusion or not in the mating pool,
allowing the persistence of an individual (or
descendants) along generations.
In our problem we consider a bi-level function to
evaluate an individual by its feasibility and
infeasibility values. The feasibility is the value
obtained by applying the objective function (1) from
the original formulation of the BDR problem. The
infeasibility is measured by the number of tasks not
assigned to the group of all drivers. A task is not
assigned if the linking constraint (29) is not satisfied
by having the left hand side smaller than the right
hand side, otherwise it may be considered feasible,
even if a task is assigned to more than one driver,
since the correction is done easily by removing the
duplicated task to one of the drivers.
SP 1
{1,6,11,16}
SP 2
{2,7,12,22}
SP 3
{3,8,18,23}
SP |V|
{10,15,25}
…
ICORES2013-InternationalConferenceonOperationsResearchandEnterpriseSystems
236

When comparing individuals, the infeasibility is the
first level evaluation value. The feasibility value is
only used to compare individuals with the same
value of infeasibility, since it is normal that
individuals with higher infeasibility (more
unassigned tasks) return better feasibility values
(cost), because the tasks not assigned may have costs
not considered.
4.2.5 GA Runs
A GA run consists in constructing an initial
population and letting it evolve through generations
until achieving a stopping criterion. We are
considering as stopping criterion the reaching of a
number (defined by parameter) of consecutive
generations without improving the evaluation value.
Figure 4 describes the most important steps of a
run of the algorithm.
Generate Initial Population
repeat{
Build Mating Pool (MP):
for (population size){
Select a pair of individuals
Apply tournament to select the best
Add best to MP
}
Apply Crossover:
for (population size/2){
Select pair of individuals from MP
If selected to crossover{
Apply crossover operator to pair
Add offspring to next population
}else
Add pair of individuals to next
population
}
Apply Mutation:
for each individual of population
If selected to mutation
Apply mutation operator
Update Best:
for each individual of population{
Evaluate Individual
Update best found
}
}while(iterations without improvement
< limit)
Figure 4: GA pseudocode.
The entire algorithm is parameterized. The
generation of the initial population uses parameters
to decide the percentage of individuals created by
each of the methods already available in the
framework. We also defined parameters to the
population size, number of generations without
improvement (for stopping criterion), probability of
crossover and probability of mutation.
5 RESULTS
To evaluate the effectiveness of the proposed search
method over the search space of schedules (resulting
from solving the decomposition model with column
generation) some tests were made over a subset of
the instances used in (Moz et al., 2009). The
instances tested were the designated as P80 and the
same parameters were used, except for the number
of drivers: we use a pool of 36 drivers. In the
instances, the group of drivers is divided in four
categories of overtime cost, starting from a cost
factor of one and doubling for the next group,
resulting that the last group overtime is 8 times more
expensive.
The results show the effectiveness of the column
generation over the decomposition model to
generate a good search space of schedules where a
complete roster can be obtained and also that the GA
can be a faster option to search for the best roster in
that search space.
All the tests ran on a Dell Optiplex 380 with an
Intel Core 2 Duo CPU E7500, 2,93GHz, 4 Gb of
RAM, operating system Windows Vista 32 bits and
IBM ILOG 12.3 installed.
In this stage we only tested the first search phase,
which means we only used the steps 1 and 2 from
Figure 1.
To test the search space obtained by the column
generation, the step 2 used was the direct
optimization of the resulting RMP, setting the
variables as binary, designated as MipSearch. This
procedure searches for the optimal solution within
the set of schedules available in the search space. In
the tests, the total time was limited to 7200s (2
hours) and the column generation (step1) was
limited to 1800s (1/2 hour).
Table 1 presents the obtained results. The
Feasibility column presents the total cost of the
roster found and the Infeasibility column displays
the number of tasks not assigned.
The first observation from the results presented
in Table 1 is that CPLEX spent all available time
applying branch-and-bound to search for the optimal
solution, indicating that it is time consuming to find
the best available solution. On 3 of the 11 instances,
no feasible solution was found (complete roster with
all tasks assigned).
The previous results also show that this search
method is not a good option if the entire algorithm
AHybridMetaheuristicfortheBusDriverRosteringProblem
237

Table 1: MipSearch Results.
Instance Infeasibility Feasibility Time Search Time CG
P80 0 93 - 5400 1800
P80 1 0 6477 5400 1800
P80 2 0 4628 6815
,
2 384
,
7
P80 3 0 8762 5400 1800
P80 4 0 6809 5400 1800
P80 5 0 6648 5400 1800
P80 6 0 7182 5400 1800
P80 7 0 6819 5400 1800
P80 8 12 - 5400 1800
P80 9 0 5599 5563
,
2 1636
,
4
P80 10 3 - 5400 1800
from Figure 1 is used (with multiple searches in the
cycle – step 6), since it consumes too much time.
To test the GA as search method, two sets of
tests were run, where the difference between them is
in the search space generation. In the first set of tests
(GA1), in each iteration of the column generation a
schedule from each driver is added to the RMP (if
attractive) and in the second one (GA2), only one
schedule is added from a single driver, changing
sequentially the driver through the iterations. Both
options were tried since, though generating columns
for all subproblems in each iteration results in a fast
growth of the number of variables in the RMP,
making it difficult to optimize, it also may result in
similar solutions to all drivers which may be useful
to the GA. The Mip Search was applied over the
search space resulting from the column generation
with one subproblem solved in each iteration.
The following parameters were used in the GA:
Population Size = 200;
Crossover | Mutation Probability = 80% | 15%;
Stopping Criterion = 5000 generations without
improvement.
Each initial population is composed by:
70% of individuals selected randomly from the
pots of schedules available (40% with uniform
distribution for each schedule and 30% with biased
distribution for each schedule according to the
optimal solution of the RMP);
10% of individuals composed by rounding the
linear solution of the RMP;
10% of individuals composed by the first
solution generated by column generation;
10% of individuals composed by the last solution
generated by column generation.
Table
2 shows the results obtained by GA1 and
GA2. In each instance test, after the column
generation (limited to 1800s) 10 runs of the GA
were performed. Columns (1) display the number of
unassigned tasks for the best solution found by each
GA, while columns (2) present the average of this
number for the 10 runs. Columns (3) display the
corresponding cost value, while columns (4) present
the average cost in the 10 runs. The last column of
each group shows the average search time spent by
the GA to find the solutions. When value Best (1) is
zero, the algorithm was able to find a feasible
solution for the global problem. The GA were
clearly more effective in the second scenario
obtaining valid rosters to 7 of the 11 instances, only
one less than the MipSearch. Curiously, in the
harder instances (were the MipSearch did not found
a solution, instances 0, 8 and 10) the GA1 obtained
better results, even better than MipSearch for the
P80_0 (considering only the Infeasibility value).
Since the search space of the GA1 is larger than
GA2, it is natural to have higher average search
time, but in both scenarios, the search time is much
faster than the MipSearch, claiming to be a good
option to be used as the “Search” step in the entire
algorithm from Figure 1 to improve the first solution
obtained getting new schedules after applying
perturbations on the RMP. The GA2 found valid
rosters in almost all instances. The three instances
where the MipSearch was unable to find a solution
have a high number of tasks to assign, making it
difficult to find the exact combination of schedules
where all tasks are assigned.
The results obtained reveal promising to the
entire SearchCol algorithm, since they suggest that
GA are effective and fast as search method. The
resulting Feasibility values obtained by the best GA
configuration are on average 17% higher than the
best found by MipSearch, however the time spent by
the GA in the search is less than 5% (average 1,8%)
of the time spent by MipSearch.
6 CONCLUSIONS
This paper presents a new formulation to the BDRP
and a new hybrid metaheuristic to obtain valid
rosters from the proposed model without large time
consumption. The proposed decomposition model
splits the problem of tasks assignment into multiple
subproblems were the assignment concerns only one
driver, and a restricted master problem where the
variables are associated to work-schedules created
by the subproblems and where the assignment of all
tasks is assured by combining multiple work-
schedules from all the drivers.
The column generation is used to create new
work-schedules by solving one or more subproblems
in each iteration until an optimal linear solution is
obtained.
ICORES2013-InternationalConferenceonOperationsResearchandEnterpriseSystems
238
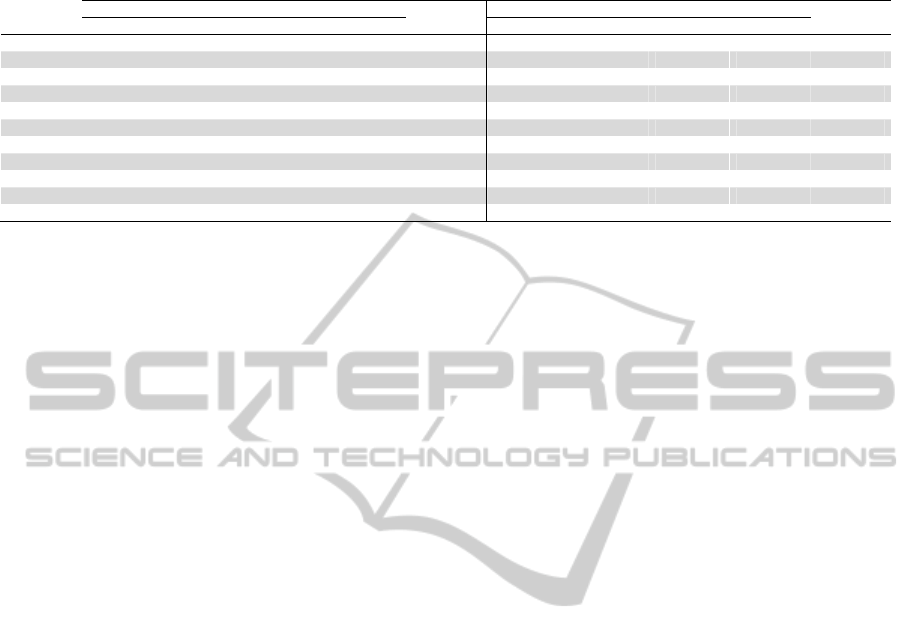
Table 2: GA results.
GA1 GA2
Infeasibility Feasibility Time Infeasibility Feasibility Time
Instance Best(1) Average(2) Best(3) Average(4) (Average) Best(1) Average(2) Best(3) Average(4) (Average)
P80_0 29 83,6 7748 7316,4 223,9 123 134,6 6251 6376,7 117,2
P80_1 0 13,2 7970 7096,2 91,0 0 7,3 8324 8325,1 78,7
P80_2 0 0 5854 6743,9 52,6 0 0 5625 5697,2 31,9
P80_3 9 13,3 8919 9494,1 87,3 0 5,3 9329 10865,4 64,3
P80_4 5 11,1 7107 6798,1 77,4 0 2,2 7986 8583,2 64,7
P80_5 3 7,6 7820 7594,5 84,0 0 4,2 7600 8582,7 61,4
P80_6 2 3,5 8216 8304,9 66,2 0 0 8481 9156,6 38,1
P80_7 13 18 6745 6840,2 96,0 2 5,2 9343 8757,9 45,9
P80_8 31 50,6 7711 6769,4 90,0 32 53,2 8605 6891,7 67,4
P80_9 0 2,9 7017 7344 74,6 0 0,2 6661 7287 56,9
P80_10 12 53,3 6188 6026,4 132,5 43 58 6219 5923,8 99,3
The set of subproblem solutions (driver work-
schedules), added as new columns in the CG,
defines the search space where the genetic
algorithms are used to find the best combination of
solutions that at first assigns the major number of
tasks and after reduces the total cost.
Results of applying the MipSearch (solving the
RMP as a Mip) over the work-schedules generated
by column generation are presented, with the best
values obtained within a given time limit. The
computational tests show that the proposed
metaheuristic is skilled to obtain valid rosters. Two
configurations were run using a genetic algorithm as
“search” method, showing that GA is faster than the
MipSearch.
Future work will include testing different
parameters' configurations for the GAs and
comparing our approach with the existing ones.
ACKNOWLEDGEMENTS
This work was partially funded by projects
PTDC/EIA-EIA/100645/2008 (“SearchCol–Meta-
heuristic Search by column generation” / FEDER
through “COMPETE – Programa Operacional
Factores de Competitividade” and FCT –
Foundation for Science and Technology) and PEst-
OE/MAT/UI0152 (FCT – Foundation for Science
and Technology).
REFERENCES
Alvelos, F., de Sousa, A. and Santos, D. (2010).
SearchCol: Metaheuristic Search by Column
Generation. In M. Blesa, C. Blum, G. Raidl, A. Roli &
M. Sampels (Eds.), Hybrid Metaheuristics (Vol. 6373,
pp. 190-205): Springer Berlin / Heidelberg.
Alvelos, F., Sousa, A. and Santos, D. (2013). Combining
column generation and metaheuristics. In E.-G. Talbi
(Ed.), Hybrid metaheuristics (pp. 285-334): Springer.
Barnhart, C., Johnson, E. L., Nemhauser, G. L.,
Savelsbergh, M. W. P. and Vance, P. H. (1998).
Branch-and-Price: Column Generation For Solving
Huge Integer Programs. Operations Research, 46(3),
316-329.
Burke, E. K., De Causmaecker, P., Berghe, G. and Van
Landeghem, H. (2004). The State of the Art of Nurse
Rostering. Journal of Scheduling, 7(6), 441-499.
Burke, E. K., Kendall, G. and Soubeiga, E. (2003). A
Tabu-Search Hyperheuristic for Timetabling and
Rostering. Journal of Heuristics, 9(6), 451-470.
Dantzig, G. B. (1963). Linear Programming and
Extensions. Princeton, New Jersey: Princeton
University Press.
Dantzig, G. B. and Wolfe, P. (1960). Decomposition
Principle for Linear Programs. Operations Research,
8(1), 101-111.
De Leone, R., Festa, P. and Marchitto, E. (2010). A Bus
Driver Scheduling Problem: a new mathematical
model and a GRASP approximate solution. Journal of
Heuristics, 1-26.
Desaulniers, G., Desrosiers, J. and Solomon, M. M.
(2005). Column Generation. New York: Springer.
Desrosiers, J., Soumis, F. and Desrochers, M. (1984).
Routing with time windows by column generation.
Networks, 14, 545-565.
Dorne, R. (2008). Personnel Shift Scheduling and
Rostering. In C. Voudouris, D. Lesaint & G. Owusu
(Eds.), Service Chain Management (pp. 125-138):
Springer Berlin Heidelberg.
Ernst, A. T., Jiang, H., Krishnamoorthy, M. and Sier, D.
(2004). Staff scheduling and rostering: A review of
applications, methods and models. European Journal
of Operational Research, 153(1), 3-27.
Holland, J. H. (1992). Adaptation in natural and artificial
systems: MIT Press.
ILOG, I. (2009). User's Manual for CPLEX.
Kohl, N. and Karisch, S. E. (2004). Airline Crew
Rostering: Problem Types, Modeling, and
Optimization. Annals of Operations Research, 127(1),
223-257.
Lübbecke, M. E. and Desrosiers, J. (2005). Selected
Topics in Column Generation. Oper. Res., 53(6),
1007-1023.
AHybridMetaheuristicfortheBusDriverRosteringProblem
239

Lučić, P. and Teodorović, D. (2007). Metaheuristics
approach to the aircrew rostering problem. Annals of
Operations Research, 155(1), 311-338.
Mitchell, M. (1996). An introduction to genetic
algorithms: MIT Press.
Moz, M. and Pato, M. (2007). A genetic algorithm
approach to a nurse rerostering problem. Computers &
Operations Research, 34(3), 667-691.
Moz, M., Respício, A. and Pato, M. (2009). Bi-objective
evolutionary heuristics for bus driver rostering. Public
Transport, 1(3), 189-210.
Reeves, C. R. (1997). Genetic Algorithms for the
Operations Researcher. INFORMS Journal on
Computing, 9(3), 231-250.
Rodrigues, M. M., de Souza, C. C. and Moura, A. V.
(2006). Vehicle and crew scheduling for urban bus
lines. European Journal of Operational Research,
170(3), 844-862.
Ruibin, B., Burke, E. K., Kendall, G., Jingpeng, L. and
McCollum, B. (2010). A Hybrid Evolutionary
Approach to the Nurse Rostering Problem.
Evolutionary Computation, IEEE Transactions on,
14(4), 580-590.
Wren, A. (1996). Scheduling, timetabling and rostering —
A special relationship? In E. Burke & P. Ross (Eds.),
Practice and Theory of Automated Timetabling (Vol.
1153, pp. 46-75): Springer Berlin / Heidelberg.
ICORES2013-InternationalConferenceonOperationsResearchandEnterpriseSystems
240
