
Adaptive Agents for Cyber-Physical Systems
Ichiro Satoh
National Institute of Informatics, 2-1-2 Hitotsubashi Chiyoda-ku, Tokyo, 101-8430, Japan
Keywords:
Self-adaptation, Bio-inspired Approach, Cyber-Physical Systems, Agent.
Abstract:
This paper proposes a bio-inspired approach to adapting software components in CPSs. It introduces the
notions of differentiation and dedifferentiation in cellular slime molds. When a software component delegates
a function to another component coordinating with it, if the former has thefunction, thisfunction becomes less-
developed and the latter’s function becomes well-developed like that in cellular differentiation. The approach
enables software components on CPSs to be naturally adapted to changes in the cyber and physical world in a
self-organizing manner. It is constructed as a middleware system to execute general purpose applications on a
CPS. We present several evaluations of the approach in CPSs.
1 INTRODUCTION
Cyber-physical systems (CPSs) are complicated and
dynamic by nature. They must adapt themselves to
changes in the physical world. For example, the
sensing systems for catastrophes, e.g., earthquakes,
deluges, radiation, and forest fires, have been de-
signed extensivelyagainst disasters. CPSs must be re-
silient. In fact, even when most sensor nodes are dam-
aged, remaining nodes should organize themselves
and achieve their goals as much as possible. CPSs
should also adapt themselves to the requirements of
multiple applications. Nodes in CPSs may be het-
erogenous and do not need to provide the same tasks
unlike those in peer-to-peer computing systems and
sensor networks. They should delegate some tasks to
other nodes to save their resources.
The complexity and dynamism of CPSs are be-
yond our ability to build and manage systems through
traditional approaches, such as those that are central-
ized and top-down. Instead, we propose an evolution-
ary approach to manage CPSs with small and sim-
ple rules for adaptation. It introduces the notion of
(de)differentiation into CPSs. When similar functions
are running on different nodes connected through a
network, one of them should automatically be placed
by the other. Remaining nodes should provide those
functions that were provided by disconnected nodes
as much as possible, when the network is partitioned.
Differentiation is the mechanism by which cells in
a multicellular organism become specialized to per-
form specific functions in a variety of tissues and or-
gans. Different kinds of cell behaviors can be ob-
served during embryogenesis: cells double, change
in shape, and attach at and migrate to various sites
within the embryo without any obvious signs of dif-
ferentiation. A CPS is a system featuring a tight com-
bination of computational and physical components.
The former consists of hardware and software compo-
nents. Our approach offers a mechanism for adapting
software components, which may be running on com-
puters connected through a network. The approach
involves treating the undertaking/delegation of func-
tions in software components from/to other compo-
nents, including physical and hardware components,
as their differentiation factors. When a software com-
ponent delegates a function to another component,
if the former has the function, its function becomes
less-developed. The latter’s function becomes well-
developed if the latter is a software component. The
proposed system also should be reasonable and avail-
able in real systems instead of in simulation-based
systems.
2 RELATED WORK
The notion of self-organization is rapidly gaining im-
portance in the area of CPSs. We discuss several re-
lated studies on software adaptation in distributed and
ubiquitous computing systems in addition to CPSs.
Several researchers have explored adaptive ap-
proaches to managing CPSs, but most of them have
aimed at managing networks rather than functions
in CPSs. In fact, they were constructed based on
257
Satoh I..
Adaptive Agents for Cyber-Physical Systems.
DOI: 10.5220/0004244402570262
In Proceedings of the 5th International Conference on Agents and Artificial Intelligence (ICAART-2013), pages 257-262
ISBN: 978-989-8565-39-6
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
wireless sensor networks. One of the most typical
self-organization approaches to distributed systems is
swarm intelligence (Bonabeau et al., 1999; Dorigo
and Stutzle, 2004). Although there is no central-
ized control structure dictating how individual agents
should behave, interactions between simple agents
with static rules often lead to the emergence of in-
telligent global behavior. Most existing approaches
have only focused on their target problems or ap-
plications but they are not general purpose, whereas
CPSs are general purpose. Our software adaptation
approach should be independent of applications. Fur-
thermore, most existing self-organization approaches
explicitly or implicitly assume a large population of
agents or boids. However, real CPSs have no room
to execute such large numbers of agents. In fact, a
CPS consists of embedded computers, whose com-
putational resources are limited. Consequently, our
software adaptation mechanism for CPSs must spend
little computational resources of the systems for soft-
ware adaptation as possible.
Georgiadis et al. (Georgiadis et al., 2003)
presented connection-based architecture for self-
organizing software components on a distributed sys-
tem. Like other software component architectures,
they intended to customize their systems by chang-
ing the connections between components instead of
the internal behaviors inside them. Like ours, Cheng
at al. (Cheng et al., 2006) presented an adaptive se-
lection mechanism for servers by enabling selection
policies, but they did not customize the servers them-
selves. They also needed to execute different servers
simultaneously. Herrman et al. proposed the bio-
inspired deployment of services on sensor networks
(Herrman, 2008). Unlike ours, their work focused on
the deployment and coordination of services, instead
of the adaptation of software itself to provide services.
We proposed a nature-inspired approach to dy-
namically deploying agents at computers in our previ-
ous paper (Satoh, 2007). The approach enabled each
agent to describe its own deployment as a relation-
ship between its location and another agent’s location.
However, the approach had no mechanism for dif-
ferentiating or adapting agents themselves. We also
presented an early prototype of this approach (Satoh,
2011) and its extension for sensor networks (Satoh,
2012). The former aimed at an adaptive mechanism
in application-specific services and the latter was an
early implementation of the approach.
3 APPROACH
Traditional management approaches may not be able
to support complications or dynamism in CPSs. In-
stead, we introduce a bio-inspired approach to CPSs.
The basic inspiration for our approach lies in cellular
differentiation, which is the process by which a less
specialized cell develops or matures to possess a more
distinct form and function in developmental biology.
When a parent cell divides into two or more daugh-
ter cells, the latter may be differentiated from the for-
mer. For example, cellular slime molds, e.g., dic-
tyostelium discoideum, are eukaryotic microorgan-
isms in the soil. Once food becomes scarce, dic-
tyostelium discoideum cells start to aggregate and dif-
ferentiate themselves. They can also be differentiated
into two types: prespore cells and prestalk cells. Each
cell tries to become a prespore cell and periodically
secretes cyclic-adenosine-monophosphate (cAMP) to
other cells. If a cell can receive more than a specified
amount of cAMP from other cells, it can become a
prespore cell. There are three rules. 1) cAMP chemo-
tactically leads other cells to prestalk cells. 2) A cell
that is becoming a prespore cell can secrete a large
amount of cAMP to other cells. 3) When a cell re-
ceives more cAMP from other cells, it can secrete less
cAMP to other cells.
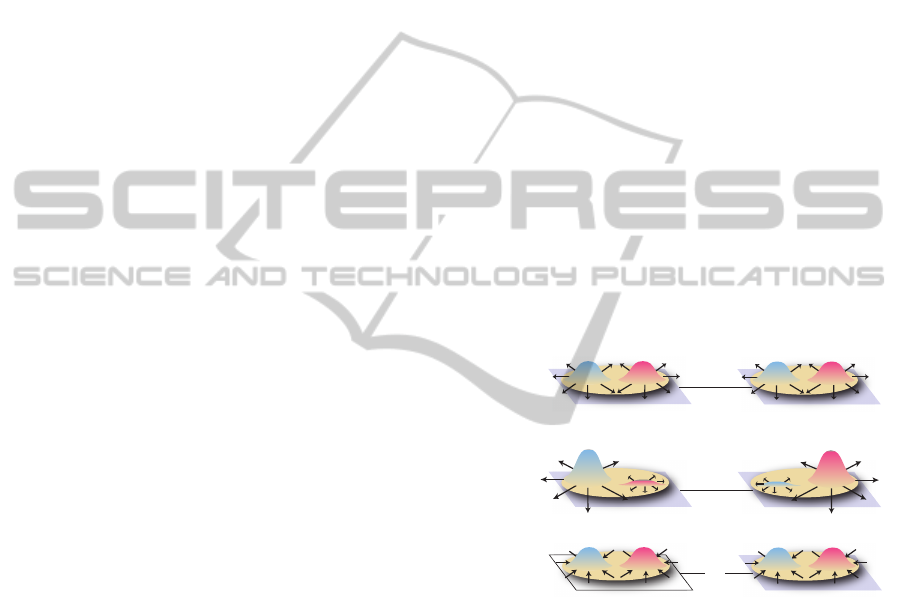
Computer 1
Behavior A
Initial phase
Differentiation
phase
Behavior B Behavior A Behavior B
Computer 2
Computer 1
Computer 2
Network
Agent 1
Agent 2
Network
Computer 1
Dedifferentiation
phase
Computer 2
Network
partioning
Behavior B
(progression)
Behavior A
(regression)
Behavior A
(progression)
Behavior B
(regression)
Behavior A Behavior B Behavior A Behavior B
Figure 1: Differentiation mechanism for software adapta-
tion.
Our approach introduces the notion of
(de)differentiation into software components,
called agents that is like a cell, where each agent is
defined as autonomous software consisting of one or
more functions. We provide hardware or physical
components in CPSs with proxies that can interact
with agents. The approach involves treating the
undertaking/delegation of functions in agents from/to
other agents as their differentiation factors. Each
function is a programmable entity and has its own
weight corresponding to the amount of cAMP and
this indicates its superiority. When an agent delegates
a function to another agent, if the former has the
function, its function becomes less-developed and
the latter’s function becomes well-developed. Agents
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
258
may lose their functions due to differentiation as well
as being busy, partitioned, or having failed. The ap-
proach also offers a mechanism for recovering from
such problems based on dedifferentiation, which is a
mechanism for regressing specialized cells to simpler,
more embryonic, unspecialized forms. As happens
in the dedifferentiation process, if there are no other
agents that are sending restraining messages to an
agent, the agent can perform its dedifferentiation
process and strengthen its less-developed or inactive
functions again.
4 SELF-ADAPTATION
MECHANISM
Our approach is maintained through two parts: run-
time systems and agents. The former is a middleware
system for running on computers in CPSs and the lat-
ter is a self-contained and autonomous software en-
tity. It has three protocols for (de)differentiation and
delegation.
4.1 Software Component
Software components in CPSs are implemented
as agents, where each agent consists of one or
more functions, called the behavior parts, and its
state, called the body part, with information for
(de)differentiation, called the attribute part. The body
part maintains program variables shared by its behav-
iors parts like instance variables in object orientation.
The behavior part defines more than one application-
specific behavior. It corresponds to a method in ob-
ject orientation. The attribute part maintains descrip-
tive information with regard to the agent, including its
own identifier.
The agent has behaviors b
k
1
, . . . , b
k
n
and w
k
i
is the
weight of behavior b
k
i
. Each agent (k-th) assigns its
own maximum to the total of the weights of all its
behaviors. The W
k
i
is the maximum of the weight of
behavior b
k
i
. The maximum total of the weights of
its behaviors in the k-th agent must be less than W
k
.
(W
k
≥
∑
n
i=1
w
k
i
), where w
k
j
− 1 is 0 if w
k
j
is 0. The W
k
may depend on agents. In fact, W
k
corresponds to the
upper limit of the ability of each agent and may de-
pend on the performance of the underlyingsystem, in-
cluding the processor. Note that we never expect that
the latter will be complete, since agents periodically
exchange their information with neighboring agents.
Furthermore, when agents receive no retraining mes-
sages from others for longer than a certain duration,
they remove information about them.
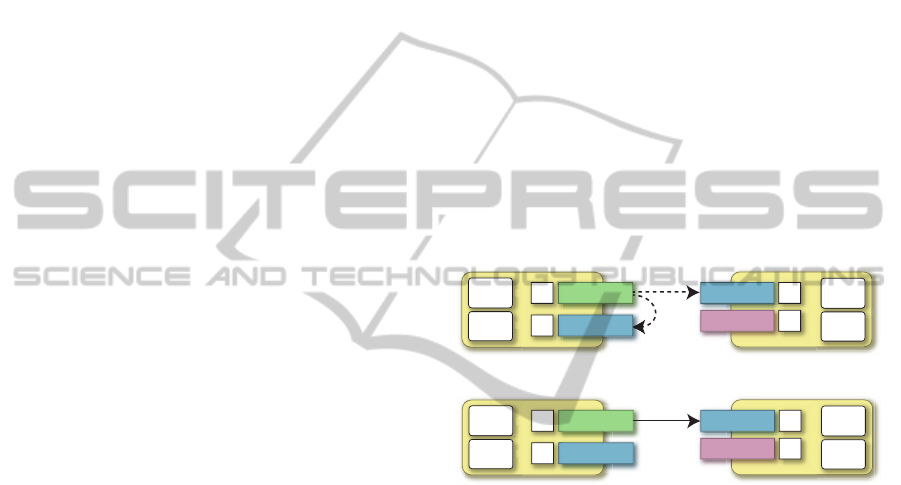
4.2 Protocol for Function Invocation
When an agent wants to execute a behavior, it needs
to select one of the available behaviors (b
j
i
, . . . , b
m
i
),
even if it has the behavior, according to the values of
their weights. This involves three steps.
i) When an agent (k-th agent) wants to execute be-
havior b
i
, it looks up the weight (w
k
i
) of the
same or a compatible behavior from its database
and the weights (w
j
i
, . . . , w
m
i
) of such behaviors
(b
j
i
, . . . , b
m
i
) from the database (Figure 2 (a))
ii) If multiple agents, includingitself, can provide the
wanted behavior, the k-th agent selects one of the
agents according to selection function φ
k
, which
maps from w
k
i
and w
j
i
, . . . , w
m
i
to b
l
i
, where l is k or
j, . . . , m.
iii) The k-th agent delegates the selected agent to ex-
ecute the behavior b
l
i
and waits for the result from
the l-th agent (Figure 2 (b)).
Body
part
Attribute
part
Agent B
Agent A
(b) Behavior selection according to weights
w
1
5
Behavior 1
w
2
5
Behavior 2
w
1
6
Behavior 2
w
2
4
Behavior 3
w
Body
part
w
Attribute
part
Body
part
Attribute
part
Agent B
Agent A
Agent B
(a) Invocation request
w
1
5
Behavior 1
w
2
5
Behavior 2
w
1
6
Behavior 2
w
2
4
Behavior 3
w
Body
part
w
Attribute
part
Figure 2: Selective invocation.
There is no universal selection function, φ, for map-
ping from the weights of behaviors to at most one ap-
propriate behavior like that in a variety of creatures.
Instead, the approach permits agents to use their own
evaluation functions, because the selection of behav-
iors often depends on their applications. For exam-
ple, one of the simplest evaluation functions makes
the agent that wants to execute a behavior select one
whose weight has the highest value and whose signa-
ture matches the wanted behavior if its database rec-
ognizes one or more agents that provide the same be-
havior, including itself.
4.3 Protocol for Adaptation
The approach introduces the undertaking/delegation
of behaviors in agents from other agents as a differen-
tiation factor. Behaviors in an agent, which are del-
egated from other agents more frequently, are well
developed, whereas other behaviors, which are dele-
gated from other agents less frequently, in the cell are
AdaptiveAgentsforCyber-PhysicalSystems
259
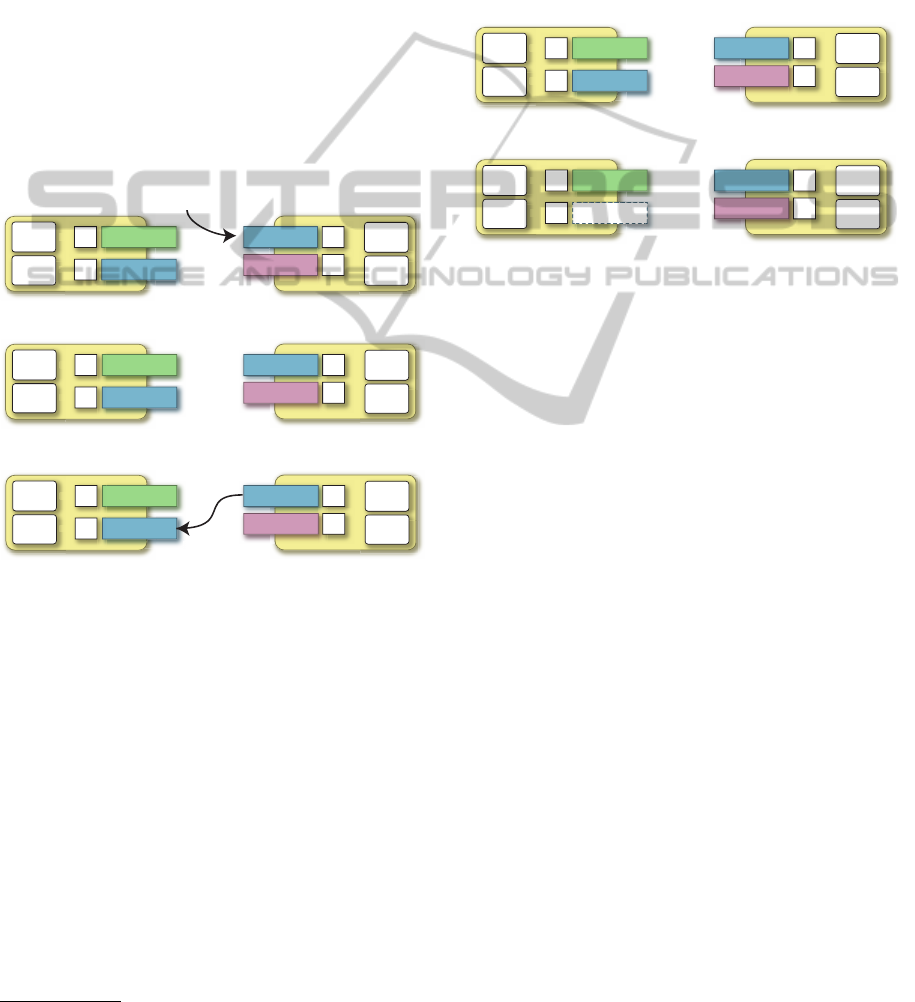
less developed. Finally, the agent only provides the
former behaviors and delegates the latter behaviors to
other agents. Our differentiation mechanism consists
of two phases. The first involves the progression of
behaviors in three steps.
i) When an agent (k-th agent) receives a request
message from another agent, it selects the behav-
ior (b
k
i
) specified in the message from its behavior
part and dispatches the message to the selected be-
havior (Figure 3 (a)). It executes the b
k
i
behavior
and returns the result.
ii) The k-th agent increases weight w
k
i
of the b
k
i
be-
havior (Figure 3 (b)).
iii) The k-th agent multicasts a restraining message
with the signature of the behavior, its identifier
(k), and the behavior’s weight (w
k
i
) to other agents
(Figure 3 (c)).
Body
part
Attribute
part
Agent B
Restraining
message
Agent A
(c) Restriction
Request message
w
1
5
Behavior 1
R
w
2
5
Behavior 2
w
1
7
Behavior 2
g
w
2
3
Behavior 3
w
Body
part
w
Attribute
part
Body
part
Attribute
part
Agent B
Agent A
(b) Progression
w
1
5
Behavior 1
w
2
5
Behavior 2
w
1
7
Behavior 2
w
2
3
Behavior 3
w
Body
part
w
Attribute
part
Body
part
Attribute
part
Agent B
Agent A
Agent B
(a) Behavior execution
w
1
5
Behavior 1
w
2
5
Behavior 2
w
1
6
Behavior 2
w
2
4
Behavior 3
w
Body
part
w
Attribute
part
Incremental of weight
Well-developed
Figure 3: Differentiation-based adaptation on called side.
When behaviors are internally invoked by their
agents, their weights are not increased. If the total
weights of the agent’s behaviors,
∑
w
k
i
, is equal to
their maximal total weight W
k
, it decreases one of
the minimal (and positive) weights (w
k
j
is replaced
by w
k
j
− 1 where w
k
j
= min(w
k
1
, . . . , w
k
n
) and w
k
j
≥ 0).
1
Although restraining messages correspond to the dif-
fusion of cAMP in differentiation, they can explic-
itly carry the weights of the agents that send them to
reduce the number of restraining messages, because
they can be substituted for more than one retaining
message without weights. The second phase supports
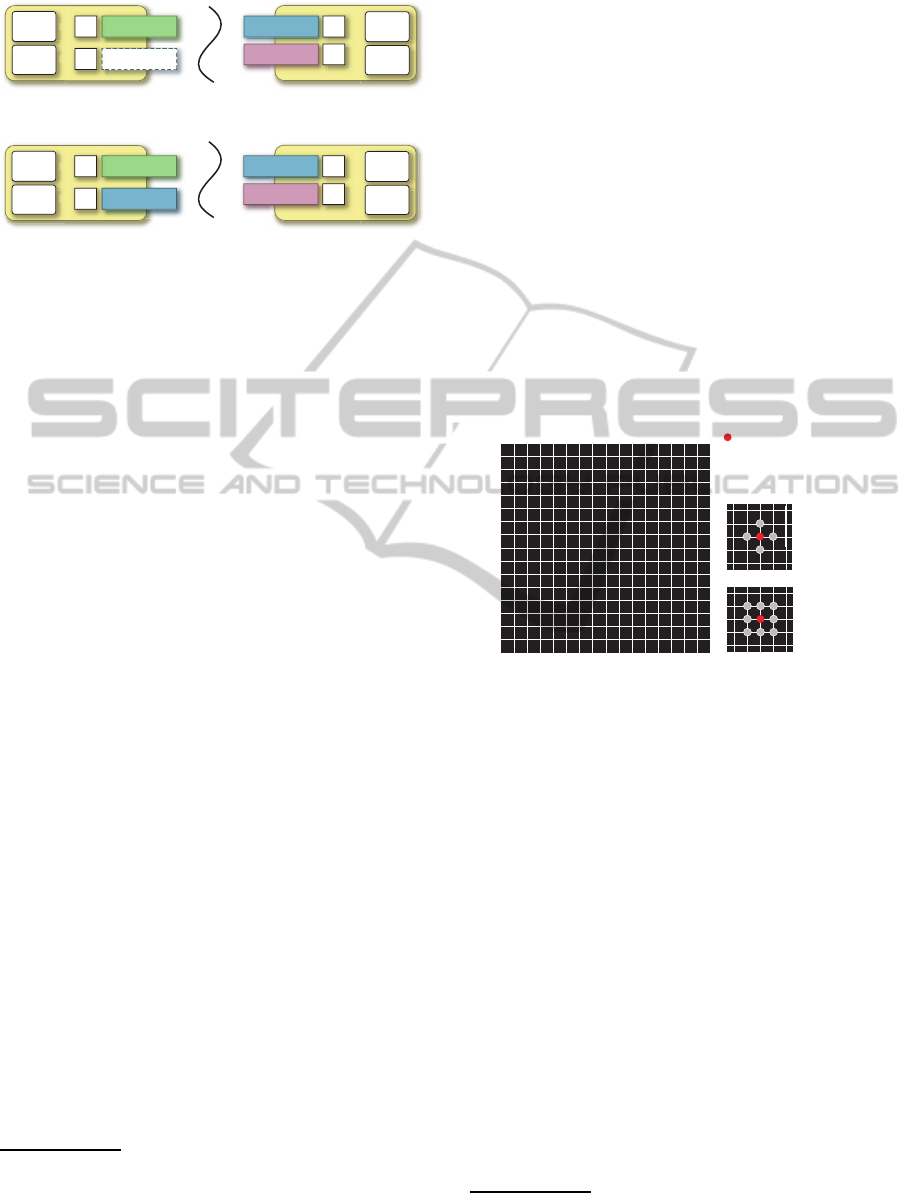
the retrogression of behaviors in three steps.
i) When an agent (k-th agent) receives a restraining
message with regard to b
j
i
from another agent (j-
1
Figures 2, 3, and 4 assume W
A
and W
B
to be ten.
th), it looks for the behaviors (b
k
m
, . . . b
k
l
) that can
have the signature specified in the received mes-
sage (Figure 3 (c)).
ii) If it has such behaviors, it decreases their weights
(w
k
m
, . . . w
k
l
) in its database and updates the weight
(w
j
i
) in its database (Figure 4 (a)).
iii) If the weights (w
k
m
, . . . , w
k
l
) are under a specified
value, e.g., 0, the behaviors (b
k
m
, . . . b
k
l
) are inacti-
vated (Figure 4 (b)).
Body
part
Attribute
part
Agent B
Agent A
w
1
5
Behavior 1
w
2
4
Behavior 2
w
1
7
Behavior 2
w
2
3
Behavior 3
w
Body
part
w
Attribute
part
(b) Regression
(a) Regression
Body
part
Attribute
part
Agent B
Agent A
w
1
5
Behavior 1
w
2
0
Behavior 2
w
1
7
Behavior 2
w
2
3
Behavior 3
w
Body
part
w
Attribute
part
Less-developed
Dismission
Figure 4: Differentiation-based adaptation on other sides.
CPSs may be damaged or stop due to disasters and
problems. We need a mechanism for detecting and
remedying failures in networking, computers, agents,
remote computers, and other agents. To do this, each
agent (j-th) periodically multicasts messages, called
heartbeat messages, for behavior (b
j
i
), which is still
activated with its identifier (j). This involves two
cases.
i) When an agent (k-th) receivesa heartbeat message
with regard to behavior (b
j
i
) from another agent
(j-th), it retains the weight (w
j
i
) of the behavior
(b
j
i
) in its second database.
ii) When an agent (k-th) does not receive any heart-
beat messages with regard to behavior (b
j
i
) from
another agent (j-th) for a specified time, it au-
tomatically decreases the weight (w
j
i
) of the be-
havior (b
j
i
) in its second database, and resets the
weight (w
k
i
) of the behavior (b
k
i
) to the initial value
or increases the weight (w
k
i
) in its first database
(Figure 5).
Note that behavior b
k
i
is provided by the k-th agent
and behavior b
j
i
is provided by the j-th agent. The
weights of behaviors provided by other agents au-
tomatically decrease without any heartbeat messages
from the agents. Therefore, when an agent terminates
or fails, other agents decrease the weights of the be-
haviors provided by the agent. If they have the same
or compatible behaviors, they can then activate the be-
haviors, which may be inactivated. After a request
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
260
Body
part
Attribute
part
Agent B
Agent A
w
1
5
Behavior 1
w
2
5
Behavior 2
w
1
7
Behavior 2
w
2
3
Behavior 3
w
Body
part
w
Attribute
part
(a) Isolation
(b) Dedifferentiated phase
Body
part
Attribute
part
Agent BAgent A
w
1
5
Behavior 1
w
2
0
Behavior 2
w
1
7
Behavior 2
w
2
3
Behavior 3
w
Body
part
w
Attribute
part
Partitioning
Partitioning
Figure 5: Differentiation-based adaptation on other sides.
message is sent to another agent, if the agent waits for
the result to arrive for longer than a specified time,
it selects one of the agents that can handle the mes-
sage from its database and requests the selected agent.
If there are no agents that can provide the behavior
that can handle the behavior quickly, it promotes other
agents that have the behavior in less-developed form.
5 EVALUATION
In the current implementation, each runtime system
is constructed as a middleware system with Java. It
is responsible for executing agents and for exchang-
ing messages in runtime systems on other comput-
ers through a network. When a runtime system is
(re)connected to a network, it multicasts heartbeat
messages to other runtime systems to advertise it-
self, including its network address in a plug-and-play
protocol manner. Adaptation messages, i.e., restrain-
ing and heartbeat messages, are transmitted as multi-
cast UDP packets, which are unreliable. Application-
specific messages, i.e., request and reply, are imple-
mented through TCP sessions as reliable communica-
tions.
Let us suppose that a sensor-network system con-
sisting of 15 × 15 nodes is connected through a
grid network, as shown in Figure 6. Each node
can communicate with its four neighboring nodes
and the diameter of a circle in each node represents
the weight of a behavior. The system consists of
225 runtime systems running on twenty-five PCs (In-
tel Core 2 Duo 1.8 GHz, MacOS X 10.6, and Java
Runtime Environment ver.6) connected via a 1-GbE
switch, where each PC executes nine runtime sys-
tems.
2
Each runtime provided nine runtime systems
2
In this experiment, there were no serious differences
between this system and 225 servers, because our approach
was not processor- or memory- intensive. Since the loss
rate of UDP packets was less than 5%, we could ignore col-
running on different Java VMs. These runtime sys-
tems, called nodes in this section, were connected
according to the topology of the target grid network
and could multicast to four neighboring runtime sys-
tems through the grid network (Figure 6 (i)). We
also assumed that each node had two photosensors
for two different wavelengths, called lights A and B.
Each agent had two behaviors, called behaviors A
and B, where the first responded to light in wave-
length A and the second to light in wavelength B.
Agents were distributed at all nodes. To emulate pho-
tosensors, we also deployed two (non-differentiated)
agents as pseudo-sensors agents at each node, where
such agents periodically notified their runtime sys-
tems of events every second. Some of the following
experiments explicitly limited the reachability of mes-
sages for differentiation-based adaptation, e.g., re-
straining and heartbeat messages within UDP multi-
cast domains.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
15
14
13
12
11
10
9
8
7
6
5
4
3
2
1
behavior in agent
15×15 grid network
i) 4-neighboring nodes
ii) 8-neighboring nodes
Message reachability from
center agent:
Figure 6: Visualization of Behavior weights in agents on
grid network.
We assumed light was irradiated in one wave-
length to all nodes in the first experiment and each
node could only receive messages from at most four-
neighboring nodes (Figure 6 (i)). Two behaviors of
every agent were initially inactive because there was
no light. When we started pseudo-photosensor agents
for light A to emulate the irradiation of light A, all
agents activated behavior A (Figure 7 (i)). After five
seconds, some agents were more developed and the
others were less developed (Figure 7 (ii)). As a re-
sult, the weights of behavior-A in agents were speck-
led and unstable at nodes. Ten seconds after this, the
weights of the behaviors converged and stabilized in
a grill shape (Figure 7 (iii)). When we stopped irra-
diating light A, agents diverged and then inactivated.
This experiment proved that our approach enabled
software-level adaptations to converge on their proper
differentiated states.
We changed the reachability of messages to eight
lisions on the grid network in our performance evaluation in
the experiment.
AdaptiveAgentsforCyber-PhysicalSystems
261
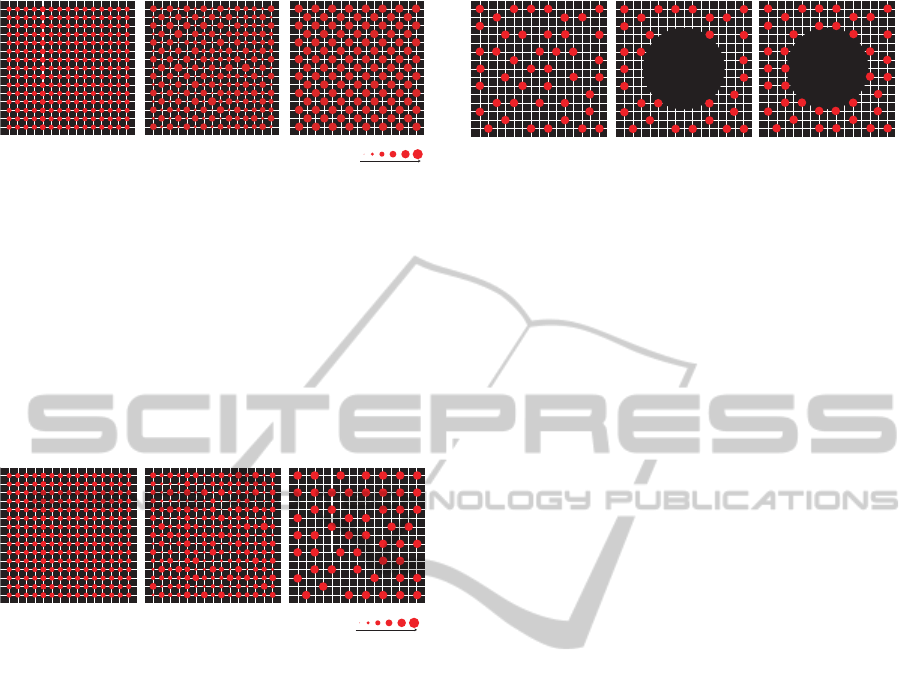
ii) Weights (5 second later)
i) Initial weights
iii) Weights (10 second later)
Diameter is propostional to weight
Weight
0
10
Figure 7: Behavior weights in agents with the whole stimu-
lus on grid network.
neighboring nodes (Figure 6 (ii)). Like the first ex-
periment, we irradiated light in one wavelength to
all nodes. Figure 8 (i) and (ii) show the weights
of behaviors in agents ten and twenty seconds later.
Even though differentiated behaviors were uneven,
they could be placed within certain intervals, i.s., two
edges on the grid network. This proved that our ap-
proach was useful in developing particular functions
of software components at nodes.
ii) Weights (10 second later)i) Initial weights iii) Weights (20 second later)
Diameter is propostional to weight
Weight
0
10
Figure 8: Behavior weights in agents with different message
reachability.
We still assumed the reachability of messages
eight neighboring nodes (Figure 6 (ii)). Figure 9 (i)
was the initial weights of agents on the network. We
explicitly made a flawed part in the network (Figure 9
(ii)). Some agents dedifferentiate themselves in nodes
when a flawed part made in the network. In the exper-
iment agents around the hole started to activate them-
selves through dedifferentiation. The weights of their
behaviors converged according to the weights of their
behaviors to the behaviors of other newly activated
agents in addition to existing agents. Finally, some
agents around the hole could support the behaviors
on behalf of the dismissed agents with the flawed part.
This result provethat our approach could remedy such
a damage appropriatively in a self-organized manner.
This is useful managing CPSs for sensing catastro-
phes, e.g., earthquakes and deluges.
6 CONCLUSIONS
This paper proposed an approach to adapting soft-
ware components on CPSs. It is unique to other
ii) Partial destructioni) Initial weights iii) 20 second later
Figure 9: Adaption to flawed part in network.
existing software adaptations in introducing the no-
tions of (de)differentiation and cellular division in
cellular slime molds, e.g., dictyostelium discoideum,
into software components. When a software com-
ponent delegates a function to another component,
if the former has the function, its function becomes
less-developedand the latter’s function becomes well-
developed. The approach was constructed as a mid-
dleware system on CPSs instead of any simulation-
based systems. Components can be composed from
Java objects written in JavaBean. We described sev-
eral evaluations of the approach with a practical ap-
plication.
REFERENCES
Bonabeau, E., Dorigo, M., and Theraulaz, G. (1999).
Swarm Intelligence: From Natural to Artificial Sys-
tems. Oxford University Press.
Cheng, S., Garlan, D., and Schmerl, B. (2006).
Architecture-based self-adaptation in the presence of
multiple objectives. In Proceedings of International
Workshop on Self-adaptation and Self-managing Sys-
tems (SEAMS’2006), pages 2–8. ACM Press.
Dorigo, M. and Stutzle, T. (2004). Ant Colony Optimiza-
tion. MIT Press.
Georgiadis, I., Magee, J., and Kramer, J. (2003). Self-
organising software architectures for distributed sys-
tems. In Proceedings of 1st Workshop on Self-healing
systems (WOSS’2002), pages 33–38. ACM Press.
Herrman, K. (2008). Self-organizing Ambient Intelligence.
VDM.
Satoh, I. (2007). Self-organizing software components in
distributed systems. In Proceedings of 20th Interna-
tional Conference on Architecture of Computing Sys-
tems (ARCS’2007), volume 4415 of Lecture Notes in
Computer Science (LNCS), pages 185–198. Springer.
Satoh, I. (2011). Cellular differentiation-based service
adaptation. In Proceedings of International Confer-
ence on Service Oriented Computing. Springer.
Satoh, I. (2012). Resilient architecture for sensor networks.
In Proceedings of 9th International Conference on
Networked Sensing Systems (INSS’2012). IEEE Com-
puter Society.
ICAART2013-InternationalConferenceonAgentsandArtificialIntelligence
262
