
Unsupervised Feature Learning using Self-organizing Maps
Marco Vanetti, Ignazio Gallo and Angelo Nodari
Dipartimento di Scienze Teoriche e Applicate, Universit
`
a degli Studi dell’Insubria, Varese, Italy
Keywords:
Unsupervised Feature Learning, Self-organizing Map, Natural Images Classification.
Abstract:
In recent years a great amount of research has focused on algorithms that learn features from unlabeled data.
In this work we propose a model based on the Self-Organizing Map (SOM) neural network to learn features
useful for the problem of automatic natural images classification. In particular we use the SOM model to
learn single-layer features from the extremely challenging CIFAR-10 dataset, containing 60.000 tiny labeled
natural images, and subsequently use these features with a pyramidal histogram encoding to train a linear SVM
classifier. Despite the large number of images, the proposed feature learning method requires only few minutes
on an entry-level system, however we show that a supervised classifier trained with learned features provides
significantly better results than using raw pixels values or other handcrafted features designed specifically for
image classification. Moreover, exploiting the topological property of the SOM neural network, it is possible
to reduce the number of features and speed up the supervised training process combining topologically close
neurons, without repeating the feature learning process.
1 INTRODUCTION
For some very complex problems, such as the au-
tomatic categorization of natural images, a common
trend in recent years consists in the use of unsuper-
vised feature learning and deep learning algorithms
to learn a set of features from unlabeled data in an un-
supervised approach. Features learned are typically
used to train a supervised discriminative model, e.g.
a SVM classifier. Feature learning algorithms are op-
posed to methods that use specific handcrafted fea-
tures, chosen by a domain expert. In deep learning lit-
erature many methods such as K-means and Gaussian
Mixtures (Coates et al., 2011), Autoencoder (Hin-
ton and Salakhutdinov, 2006; Bengio et al., 2007),
Restricted Boltzmann Machine (Hinton et al., 2006;
Krizhevsky, 2009) and Sparse Coding (Lee et al.,
2006) have been successfully applied to the problem
of single-layer feature learning and multi-layers deep
learning. Even in the computer vision literature have
been proposed methods that exploit the K-means al-
gorithm to create a dictionary of visual words used
as a feature in many visual class recognition prob-
lems (Lazebnik et al., 2006; Csurka et al., 2004).
In this work we train a Self-Organizing Map
(SOM) neural network to learn single-layer features
from the extremely challenging CIFAR-10 dataset,
containing 60.000 tiny natural images belonging to
10 classes, with 6.000 images per class (Krizhevsky,
2009). In the experimental section we show that a
supervised linear SVM classifier trained with oppor-
tunely encoded learned features provides significantly
better results than using raw pixels values or the Pyra-
mid Histogram of Oriented Gradients (PHOG), a pop-
ular handcrafted feature used in computer vision to
represent the shape of objects and to perform vi-
sual class recognition in natural images (Bosch et al.,
2007b; Bosch et al., 2007a). Contrary to most feature
learning algorithms, the proposed method is fast and
requires just few minutes to train the SOM, despite
the large number of images involved in the process.
The major contribution of this work is the empir-
ical study of the SOM neural network used to learn
features from a very big and challenging datasets,
the CIFAR-10. The unsupervised learning process
is fast and can be controlled by adjusting the size
of the SOM. Moreover our results show that using
the proposed method it is possible to arbitrarily re-
duce the number of features without repeating the
feature learning process by combining topologically
close neurons. This interesting property follows di-
rectly from the topological ordering property of the
SOM neural network.
This work is organized as follow. In Section 2.1
we describe the unsupervised feature learning model,
based on the SOM neural network, while Section 2.2
deals with the encoding of learned features. In Sec-
tion 3 are shown and discussed experimental results
596
Vanetti M., Gallo I. and Nodari A..
Unsupervised Feature Learning using Self-organizing Maps.
DOI: 10.5220/0004210305960601
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2013), pages 596-601
ISBN: 978-989-8565-47-1
Copyright
c
2013 SCITEPRESS (Science and Technology Publications, Lda.)
...
Input layer
Neurons
Weighted link
w
i
=[w
i1
, … ,
w
in
]
T
1 2 3 i m
... ...
b
1
b
n
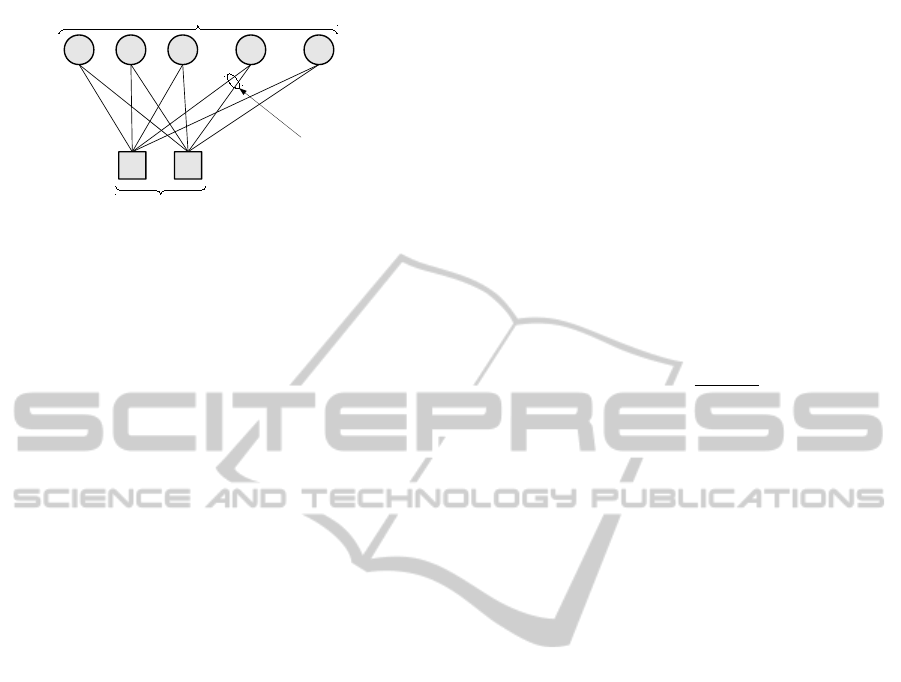
Figure 1: One-dimensional SOM.
obtained on the CIFAR-10 dataset. Finally, Section 4
gives the conclusions.
2 THE PROPOSED METHOD
This section describes the feature learning phase, per-
formed by the SOM on a large set of images, and the
encoding that exploits these learned features to de-
scribe a new image.
2.1 Unsupervised Feature Learning
As discussed in Section 1, the proposed method is
based on the SOM, an artificial neural network first
proposed by Teuvo Kohonen in early 1981. This neu-
ral network is able to produce, without supervision,
a spatially organized internal representation of vari-
ous features of input signals (Kohonen, 1990). As
depicted in Figure 1 we employ a one-dimensional
SOM, composed of a 1D grid of neurons, each of
which is fully connected to the input layer through
a series of weighted links w
i
= [w
i1
,w
i2
,...,w
in
]
T
where 0 ≤ w
i j
≤ 1, i is the index of a single neuron
and n is the dimension of the input data.
The proposed method involves an initial unsu-
pervised training phase, where a large number of
vectors are presented to the network and the neural
weights are updated according to a particular rule.
The training vectors are extracted from the input im-
ages using an overlapping sliding window, in liter-
ature this approach is known as receptive field (Ol-
shausen and Field, 1996) and is widely used (Le
et al., 2012; Coates et al., 2011; Raina et al., 2009).
No handcrafted features are extracted from the im-
age: the training vector is composed of the inten-
sity/brightness values of pixels within the receptive
field and denoted by b = [b
1
,b
2
,...,b
n
]
T
where 0 ≤
b
j
≤ 1 and n is the total number of pixels.
Let us describe now how the unsupervised learn-
ing happens. At each iteration, a new input vector is
presented to the SOM and a single neuron k is acti-
vated in a particular location of the network. We call
this neuron the winner. The winner selection occurs
by satisfying the following identity:
k
b − w
k
k
= min
i
{k
b − w
i
k}
(1)
The step previously described is followed by the
update of the weights in the neighborhood of the win-
ner. The update is described by the following equa-
tion:
w
i
(t +1) = w
i
(t)+ α(t)h
ik
(t)[b(t) − w
i
(t)] (2)
Referring to the previous Equation 2, α is called
adaptation gain or learning rate and the function
h
ik
(t) is a bell curve kernel function defined as:
h
ik
(t) = exp
−
k
i − k
k
2
2σ
2
(t)
!
(3)
where k represent the index of the winner and i the
index of the neuron to be updated. σ
2
and α are time-
variable functions and decrease linearly with the iter-
ations. Details on how to configure these functions
and how many iterations are required are discussed in
Section 3.2.
At the end of the training phase each neuron in
the network corresponds to a particular domain or fea-
ture of input signal patterns (Kohonen, 1990) and the
weights of each neuron contain a good prototype of
the input patches used to train the SOM (Gersho and
Gray, 1992).
2.2 Image Representation
Once the SOM is trained, its neural weights w can be
treated as constant values and, given a new input, ac-
cording to Equation 1, a single neuron is selected as
the winner and is therefore activated. To represent
an image we can slide the receptive field, pixel by
pixel, over the whole image obtaining a distribution
of neurons activations. These activations are then en-
coded using a histogram representation, where each
bin i = 1, 2, . . . , m in the histogram f
i
represents the
activation count for a single neuron.
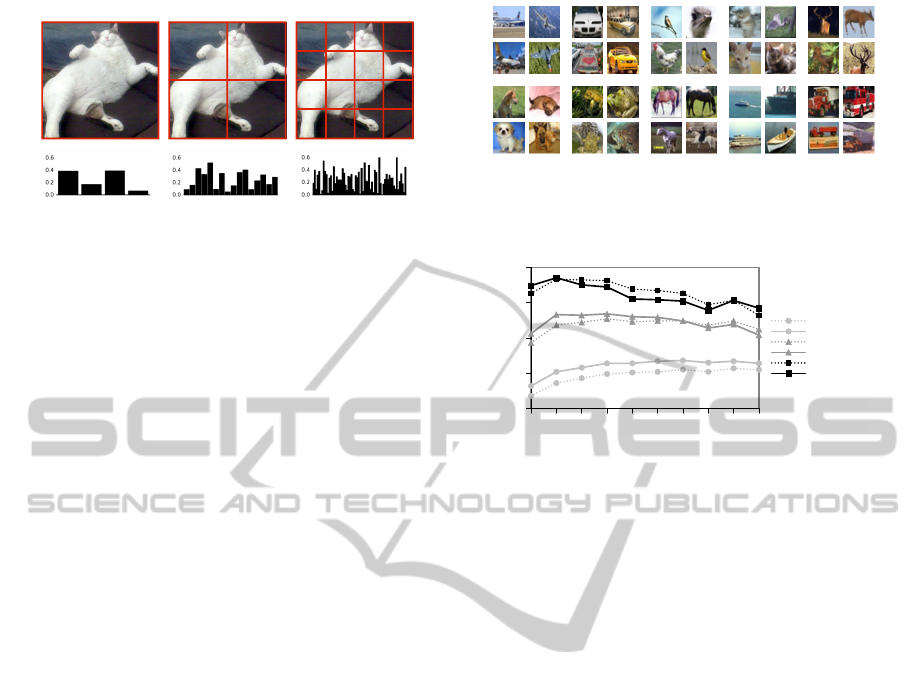
Following the spatial pyramid scheme proposed
in (Lazebnik et al., 2006), we compute more local his-
tograms on the same image, starting from a single his-
togram at the first level and quadrupling the number of
histograms for each new level of the pyramid. Con-
sidering only the histograms on a single level: they
are computed in order to cover non-overlapping re-
gions of the image, have always a rectangular shapes
and all have the same area. To form the final feature
that describes the image, the histograms from all lev-
els and all regions are concatenated as can be seen
UnsupervisedFeatureLearningusingSelf-organizingMaps
597
+=
feature
+
level 1 level 2 level 3
Figure 2: Encoding of a pyramidal histogram feature with 3
levels using a 4-neurons SOM.
in Figure 2, showing an example of a pyramidal his-
togram with 3 levels.
The final feature is a vector with dimensionality
∑
L
l=1
m · 4
l−1
, where L is the number of levels and m
is the number of neurons in the SOM. Each histogram
in the pyramid is individually normalized in order to
satisfy the identity
∑
m
i=1
f
i
= 1.
This encoding is similar to the PHOG feature,
where each bin in the histogram represents the num-
ber of edges having orientations within a certain an-
gular range (Bosch et al., 2007b).
3 EXPERIMENTS AND ANALYSIS
In this section we conduct several experiments us-
ing features extracted from images with the SOM-
based method just described and a linear Support
Vector Machine (SVM) as supervised training clas-
sifier (Cortes and Vapnik, 1995).
As specified in Section 1, the dataset used for the
experiments is the CIFAR-10, a very challenging im-
age classification dataset that contains 60.000 tiny an-
notated natural images divided into 10 classes, with
6.000 images for each class (Krizhevsky, 2009). The
images, each with a resolution of 32x32 pixels, con-
tain different classes of objects, in particular animals
and vehicles. Figure 3 shows some example images
taken from the CIFAR-10 dataset. In all experiments
we used the training set, composed by 50.000 images,
to learn features and to train the SVM and the test set,
composed by 10.000 images, to test the overall clas-
sification accuracy. As evaluation metric we used the
percentage overall accuracy (OA), which represents
the number of images correctly classified on the total
number of images of the test set.
In order to improve the statistical reliability of ac-
curacy values, for each experiment we trained 5 SVM
using 5 disjoint sets of training images and we have
averaged the test results, obtained each one on the
whole test set. We found experimentally that a third
level in the pyramidal histogram increases too much
Figure 3: Four images extracted from each class of the
CIFAR-10 dataset. The classes, from the top-left to the
bottom-right, are: airplane, automobile, bird, cat, deer, dog,
frog, horse, ship and truck.
5 10 15 20 25 30 35 40 45 50
Histogram bins
20%
25%
30%
35%
40%
Overall Accuracy
1 Level (Gray)
1 Level (Color)
2 Levels (Gray)
2 Levels (Color)
3 Levels (Gray)
3 Levels (Color)
Figure 4: Overall accuracy obtained using the PHOG based
classifier, with and without colors.
the size of the training vectors reducing the OA in all
experiments, for this reason we reported results only
for the first two levels. All tests reported in the fol-
lowing sections, except those in Section 3.4, were per-
formed using ”grayscale” pixel intensities within re-
ceptive field of 6 × 6 pixels with no local brightness
and contrast normalization.
3.1 Standard Classification Methods
We now describe the results obtained on the CIFAR-
10 dataset using three standard image classification
methods. The first method, which we call icon classi-
fier, represents each image as the concatenation of the
intensity values of the pixels. For the color version
of the icon classifier, the feature is formed by con-
catenating for each pixel the value of the three RGB
channels. To control the size of the feature vector
we scaled the image to different sizes, from 1 to 32
pixel square using linear interpolation. The best re-
sult was an OA of 39.5%, obtained using colors and
a 8 pixel squared scaling. Yes, the color is very im-
portant for the classification process, giving an im-
provement to the accuracy from 8 to 11%. We then
tested the PHOG method proposed in (Bosch et al.,
2007b), results are shown in Figure 4. We trained the
SVM using a pyramidal histogram of the gradients
computed on both the intensities of the pixels and the
RGB channels. With the PHOG feature the perfor-
mance is always acceptable and grows increasing the
levels of the pyramid. Due to the small size of the
images we could not test the PHOG with 4 levels.
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
598

To exclude that the contribution of the features
learned by the SOM can be due only to the pyramidal
encoding, we performed a test using a pyramidal his-
togram of RGB pixel values. To form the histogram
feature, the RGB space is linear quantized over the
bins of the histograms. Using the aforementioned
method a maximum OA of 38.8% was obtained with
4 bins and a 2 levels histogram. Therefore the pyrami-
dal coding with intensity/RGB feature is not sufficient
to outperform the results obtained with the previously
analyzed icon classifier. The last experiment confirms
that the CIFAR-10 dataset is very hard and we need to
learn ad-hoc features from the dataset itself in order to
achieve results that exceed the 40% accuracy.
3.2 SOM Configuration
In all experiments presented in this work we used
SOM configured according to the following specifi-
cations. The learning rate α decreases linearly with
the first 1000 iterations from 0.1 to 0.01 and for the
next 500 · m iterations from 0.01 to 0.001. These two
learning phases are known in literature as the order-
ing and tuning phases. The parameter σ decreases
linearly from m/2 to 1 during the ordering phase and
from 1 to 0 during the tuning phase. This parame-
ter configuration is widely used and documented in
many works using the SOM model (Kohonen, 1990;
Haykin, 1999). We tried to double, triple and quadru-
ple ordering and tuning iterations, but this did not lead
to any change of more than 0.5% in the classifica-
tion accuracy. Since the number of ordering and tun-
ing iterations corresponds with the number of patches
that the SOM processes and since the total number
of training patches in the CIFAR-10 dataset is much
larger than the number of iterations, it’s important to
present patches to the SOM using a random order.
We conducted first experiments using SOMs with
64 to 1024 neurons, doubling at each experiment the
number of neurons. The receptive field was set to
6 × 6 pixels. Figure 5 shows overall accuracies in
function of the size of the SOM and the number of
levels in the pyramid. In accordance with the liter-
ature on feature learning, increasing the number of
features leads to improved results, in particular in our
case there is a linear relationship between the square
of the number of neurons involved in the unsuper-
vised learning and the overall classification accuracy.
Using the second level of the pyramid, the accuracy
increases from 2.3% to 2.7%. The computational
time required to train a SOM with 512 neurons, us-
ing 4 × 4 pixel patches, was about 20 minutes, or 10
minutes using a 256-neurons SOM. Our implemen-
tation is a single threaded C# code on an Intel(R)
64 128 256 512 1024
SOM size (neurons)
38%
40%
42%
44%
46%
48%
50%
Overall Accuracy
1 Level
2 Levels
Figure 5: Overall accuracy obtained varying the number of
neurons in the SOM and the pyramidal histogram levels.
Xeon(TM) @ 2.66GHz CPU.
3.3 Reducing the Size of the Features
An important property of the SOM model is that
the weights of spatially close neurons correspond to
similar features (Kohonen, 1990). This property is
called topological ordering and is a consequence of
the Equation 2 that forces the weight vector of the
winning neuron and its neighborhood to move toward
the input vector. Exploiting this property we can ar-
bitrarily reduce the number of features used to de-
scribe an image by grouping neighboring neurons in
the same histogram bin. For example, by grouping all
pairs of neighboring neurons it is possible to halve
the size of the final feature. Grouping more close
neurons, we can further reduce the size of the fea-
ture and significantly speedup the supervised learning
performed by the SVM
1
.
We performed some experiments grouping neu-
rons from SOMs with different sizes in order to obtain
several description of images involving histograms
with different number of bins. For example, the rep-
resentation obtained by a 256-neurons SOM was re-
duced in size obtaining histograms with 128, 64 and
32 bins. We also performed a test with a 1024-
neurons SOM where, at the end of the unsupervised
learning process, the neurons were randomly ordered
in order to nullify the effect of the topological order-
ing.
Results reported in Figure 6 clearly shows that the
topological ordering of the SOM allows to efficiently
reduce the size of the features without having to re-
train the unsupervised model and without sacrificing
the classification quality for more than 1 − 2% accu-
racy. The procedure described above can not be car-
ried out in such a simple way using other not super-
vised methods that do not have the topological order-
ing property, such as the K-means clustering.
1
In our tests we noticed a 40 − 50% speedup every time
we halved the size of the features used to train the SVM.
UnsupervisedFeatureLearningusingSelf-organizingMaps
599

16 32 64 128 256 512 1024
Number of bins
20%
25%
30%
35%
40%
45%
50%
Overall Accuracy
64 neurons
128 neurons
256 neurons
512 neurons
1024 neurons
1024 neurons (no topology)
Figure 6: Overall accuracy obtained using applying the
topological grouping to reduce the number of bins in the
histogram. In this test we used a 1 Level pyramidal his-
togram.
Gray Color Gray+Norm Color+Norm
Configuration
39%
40%
41%
42%
43%
44%
45%
46%
47%
48%
Overall Accuracy
1 Level
2 Levels
Figure 7: Effect of color, local brightness and contrast nor-
malization for a 64-neurons SOM.
3.4 Improve the Quality of the Features
In this section we report the results obtained using
different receptive field sizes, adding the RGB color
information and applying a local brightness and con-
trast normalization to the patches extracted from the
image. Let’s assume that the intensity value of the
pixels varies between 0 and 1, we employed on every
patch extracted from the image a simple normaliza-
tion, subtracting the mean intensity value, dividing
by the standard deviation of its elements and sum-
ming 0.5. Pixel intensities that fall outside the 0 to
1 range after the process are clipped to lie within this
range. Local brightness and contrast normalization
is one of many methods used in feature learning al-
gorithms to improve the quality of the classification
results (Coates et al., 2011).
Figure 7 shows the effects of the introduction of
color and local brightness and contrast normalization,
while in Figure 8 we have shown how the classifica-
tion accuracy varies in function of the receptive field
size. It is interesting to notice that the use of local
normalization makes the contribution of the color less
important, this fact can be seen also in Figure 9, where
the weights of a 64-neurons SOM, trained with and
without the local normalization are shown.
An OA of 54% was obtained using a 128-neurons
SOM, 4 × 4 pixels receptive field, color and local
brightness and contrast normalization, and is compa-
rable with results obtained by (Coates et al., 2011) us-
ing a K-means with a hard pooling feature encoding
2x2 4x4 6x6 8x8
Receptive field size (pixels)
40%
42%
44%
46%
48%
50%
52%
54%
56%
Overall Accuracy
64 neur. (1 level)
128 neur. (1 level)
64 neur. (2 levels)
128 neur. (2 levels)
Figure 8: Effect of receptive field size in a 64 and 128-
neurons SOMs, varying the number of pyramid levels. In
this test we used color and local brightness and contrast nor-
malization.
(a)
(b)
Figure 9: Weights plot obtained from a 64-neurons SOM
trained with color 6 × 6 receptive fields. Effects of training
with (a) and without (b) local contrast and brightness nor-
malization of patches. Notice that the features extracted are
topologically ordered.
Overall Accuracy: 54,14%
1
2
3
4
5
6
7
8
9
10
0%
100%
20%
40%
60%
80%
(airplane) 1
(automobile) 2
(bird) 3
(cat) 4
(deer) 5
(dog) 6
(frog) 7
(horse) 8
(ship) 9
(truck) 10
Figure 10: Confusion matrix obtained with a 128-neurons
SOM, color, local contrast/brightness normalization and a
4 × 4 pixels receptive field.
and a number K of centroids similar to the number of
neurons in our SOM. Figure 10 shows the confusion
matrix for this last experiment.
3.5 Other Datasets
To test the applicability of our method to other
classes of images, we performed a further test on
the very common image classification dataset Caltech
101
2
, containing about 9000 images belonging to 101
classes. The dataset has been split into two sets, 2/3
of the images for training purposes and 1/3 for test-
2
http://www.vision.caltech.edu/Image Datasets/
Caltech101/
VISAPP2013-InternationalConferenceonComputerVisionTheoryandApplications
600

ing. In order to be processed efficiently, each image in
the dataset has been scaled to fit inside a 64 × 64 pix-
els square. We obtained a test accuracy of 87.5% us-
ing a SOM with 1024 neurons, 4 × 4 pixels receptive
field, 2 pyramid levels and colors. The same dataset
was processed using the color PHOG feature with 10
bins and 3 levels, obtaining an OA of 74.0%.
4 CONCLUSIONS
In this paper we presented a model that exploits the
Self-Organizing Map (SOM) neural network to learn
features from images without requiring any supervi-
sion. Our experiments performed on the very chal-
lenging CIFAR-10 and on the Caltech 101 datasets
show that the features learned by the SOM and en-
coded using a pyramidal histogram approach signi-
ficatively outperform the classification methods based
on raw pixels values and the PHOG feature designed
specifically for image classification. Despite the large
number of images processed in the datasets, the pro-
posed feature learning process is fast and requires few
minutes also using SOMs with hundreds of neurons.
Moreover, employing the presented model it is possi-
ble to control the size of the features used to train the
supervised classifier by grouping close neurons in the
histogram encoding scheme. This property allows to
speed up the learning process without having to repeat
the unsupervised feature learning. Experiments show
that the accuracy of the classification can be improved
by applying appropriate normalization and fine tuning
to the receptive field. Other normalization methods,
such as whitening (Hyvarinen and Oja, 2000), and
feature encoding schemes, such as hard or soft pool-
ing (Lazebnik et al., 2006; Jarrett et al., 2009), can be
applied to improve the results and will be considered
in future work. An other interesting future develop-
ment is the use of multiple levels of SOM networks
to learn more complex features that can better charac-
terize visual patterns within the images, this approach
has been successfully applied in our previous work
(Vanetti et al., 2012) for the segmentation of complex
textures.
REFERENCES
Bengio, Y., Lamblin, P., Popovici, D., and Larochelle, H.
(2007). Greedy Layer-Wise Training of Deep Net-
works. In Neural Information Processing Systems,
pages 153–160.
Bosch, A., Zisserman, A., and Muoz, X. (2007a). Image
Classification using Random Forests and Ferns. In In-
ternational Conference on Computer Vision, pages 1–
8.
Bosch, A., Zisserman, A., and Muoz, X. (2007b). Repre-
senting shape with a spatial pyramid kernel. In Con-
ference on Image and Video Retrieval, pages 401–408.
Coates, A., Lee, H., and Ng, A. Y. (2011). An analysis of
single-layer networks in unsupervised feature learn-
ing. In AISTATS.
Cortes, C. and Vapnik, V. (1995). Support-vector networks.
Machine Learning, 20:273–297.
Csurka, G., Dance, C. R., Fan, L., Willamowski, J., and
Bray, C. (2004). Visual Categorization with Bags of
Keypoints. In European Conference on Computer Vi-
sion.
Gersho, A. and Gray, R. M. (1992). Vector quantization and
signal compression.
Haykin, S. (1999). Neural networks a comprehensive foun-
dation.
Hinton, G. E., Osindero, S., and Teh, Y.-W. (2006). A
Fast Learning Algorithm for Deep Belief Nets. Neural
Computation, 18:1527–1554.
Hinton, G. E. and Salakhutdinov, R. R. (2006). Reduc-
ing the Dimensionality of Data with Neural Networks.
Science, 313:504–507.
Hyvarinen, A. and Oja, E. (2000). Independent component
analysis: algorithms and applications. Neural Net-
works, 13:411–430.
Jarrett, K., Kavukcuoglu, K., Ranzato, M., and LeCun, Y.
(2009). What is the best multi-stage architecture for
object recognition? In International Conference on
Computer Vision, pages 2146–2153.
Kohonen, T. (1990). The self-organizing map. Proceedings
of the IEEE, 78:1464–1480.
Krizhevsky, A. (2009). Learning multiple layers of features
from tiny images. Technical report.
Lazebnik, S., Schmid, C., and Ponce, J. (2006). Beyond
Bags of Features: Spatial Pyramid Matching for Rec-
ognizing Natural Scene Categories. In Computer Vi-
sion and Pattern Recognition, volume 2, pages 2169–
2178.
Le, Q., Ranzato, M., Monga, R., Devin, M., Chen, K., Cor-
rado, G., Dean, J., and Ng, A. (2012). Building high-
level features using large scale unsupervised learning.
In International Conference on Machine Learning.
Lee, H., Battle, A., Raina, R., and Ng, A. Y. (2006). Effi-
cient sparse coding algorithms. In Neural Information
Processing Systems, pages 801–808.
Olshausen, B. A. and Field, D. J. (1996). Emergence of
simple-cell receptive field properties by learning a
sparse code for natural images. Nature, 381:607–609.
Raina, R., Madhavan, A., and Ng, A. Y. (2009). Large-scale
deep unsupervised learning using graphics processors.
In International Conference on Machine Learning,
pages 110–880.
Vanetti, M., Gallo, I., and Nodari, A. (2012). Unsuper-
vised self-organizing texture descriptor. In Images:
Fundamentals, Methods and Applications (CompIM-
AGE2012).
UnsupervisedFeatureLearningusingSelf-organizingMaps
601
