
Improved Boosting Performance by Exclusion
of Ambiguous Positive Examples
Miroslav Kobetski and Josephine Sullivan
Computer Vision and Active Perception, KTH, Stockholm 10800, Sweden
Keywords:
Boosting, Image Classification, Algorithm Evaluation, Dataset Pruning, VOC2007.
Abstract:
In visual object class recognition it is difficult to densely sample the set of positive examples. Therefore,
frequently there will be areas of the feature space that are sparsely populated, in which uncommon examples
are hard to disambiguate from surrounding negatives without overfitting. Boosting in particular struggles to
learn optimal decision boundaries in the presence of such hard and ambiguous examples. We propose a two-
pass dataset pruning method for identifying ambiguous examples and subjecting them to an exclusion function,
in order to obtain more optimal decision boundaries for existing boosting algorithms. We also provide an
experimental comparison of different boosting algorithms on the VOC2007 dataset, training them with and
without our proposed extension. Using our exclusion extension improves the performance of all the tested
boosting algorithms except TangentBoost, without adding any additional test-time cost. In our experiments
LogitBoost performs best overall and is also significantly improved by our extension. Our results also suggest
that outlier exclusion is complementary to positive jittering and hard negative mining.
1 INTRODUCTION
Recent efforts to improve image classification perfor-
mance have focused on designing new discrimina-
tive features and machine learning methods. How-
ever, some of the performance gains of many well-
established methods are due to dataset augmentation
such as hard negative mining, positive mirroring and
jittering (Felzenszwalb et al., 2010; Dalal and Triggs,
2005; Laptev, 2009; Kumar et al., 2009). These data-
bootstrapping techniques aim at augmenting sparsely
populated regions of the dataset to allow any learn-
ing method to describe the class distributions more
accurately, and they have become standard tools for
achieving state-of-the-art performance for classifica-
tion and detection tasks. In this paper we revisit the
dataset augmentation idea, arguing and showing that
pruning the positive training set by excluding hard-to-
learn examples can improve performance for outlier-
sensitive algorithms such as boosting.
We focus on the boosting framework and propose
a method to identify and exclude positive examples
that a classifier is unable to learn, to make better use
of the available training data rather than expanding it.
We refer to the non-learnable examples as outliers and
we wish to be clear that these examples are not label
noise (such as has been studied in (Long and Serve-
dio, 2008; Masnadi-shirazi and Vasconcelos, 2008;
Leistner et al., 2009)), but rather examples that with a
given feature and learner combination are ambiguous
and too difficult to learn.
One of the main problems with most boosting
methods is their sensitivity to outliers such as atypical
examples and label noise (Bauer and Kohavi, 1999;
Dietterich, 2000; Freund and Science, 2009; Long
and Servedio, 2008). Some algorithms have tried to
deal with this problem explicitly (Freund, 1999; Fre-
und and Science, 2009; Masnadi-Shirazi et al., 2010;
Grove and Schuurmans, 1998; Warmuth et al., 2008;
Masnadi-shirazi and Vasconcelos, 2008), while oth-
ers, such as LogitBoost (Friedman et al., 2000) are
less sensitive due to their softer loss function.
The boosting methods with aggressive loss func-
tions give outliers high weight when fitting the weak
learner, and therefore potentially work poorly in the
presence of outliers. Softer loss function as seen in the
robust algorithms can on the other hand result in low
weights for all examples far from the margin, regard-
less if they are noisy outliers or just data to which the
current classifier has not yet been able to fit. This can
be counter-productive in cases of hard inliers, which
is illustrated in figure 2(a). Another problem that soft
loss functions are not able to solve is that outliers are
still able to affect the weak learners during the early
11
Kobetski M. and Sullivan J. (2013).
Improved Boosting Performance by Exclusion of Ambiguous Positive Examples.
In Proceedings of the 2nd International Conference on Pattern Recognition Applications and Methods, pages 11-21
DOI: 10.5220/0004204400110021
Copyright
c
SciTePress

(a) Chair class
(b) Bottle class
Figure 1: Examples of outliers and inliers. The top rows
of (a) and (b) show outliers while the bottom rows show
inliers. We focus on how to detect the outliers and how their
omission from training improves test results. The images
are from the VOC2007 dataset.
stages of the training, which due to the greedy nature
of boosting can only be undone later on by increasing
the complexity of the final classifier.
In this paper we provide an explicit analysis on
how various boosting methods relate to examples via
their weight functions and we argue that a distinct
separation in the handling of inliers and outliers can
help solve these problems that current robust boosting
algorithms are facing.
Following this analysis we propose our two pass
boosting algorithm extension, that explicitly handles
learnable and non-learnable examples differently. We
define outliers as examples that are too hard-to-learn
for a given feature and weak learner set, and identify
them based on their classification score after a first
training round. A second round of training is per-
formed, where the outliers are subjected to a much
softer loss function and are therefore not allowed to
interfere with the learning of the easier examples, in
order to find a better optimum. This boosting algo-
rithm extension consistently gives better test perfor-
mance, with zero extra test-time costs at the expense
of increased training time. Some examples of found
inliers and outliers can be seen in figure 1.
1.1 Relation to Bootstrapping Methods
To further motivate our data-centric approach to
learning, we illustrate the problems that different
dataset augmentation techniques address. In regions
where the positive training examples are dense and
the negatives are existent but sparse, hard negative
mining might improve the chances of finding the op-
timal decision boundary. In regions where positives
are sparse and negatives existent, jittering and mirror-
ing might have some effect, but the proper analogue
to hard negative mining is practically much harder,
since positive examples need to be labelled. At some
scale this can be done by active learning (Vijaya-
narasimhan, 2011), where labelling is done iteratively
on selected examples. Our approach tries to handle
the regions where positives are sparse but additional
hard positive mining is not possible, either due to lim-
ited resources or because all possible positive min-
ing has already been done. We address this problem
by restricting hard-to-learn positives from dominat-
ing the training with their increasingly high weights
by excluding them from the training.
Our algorithm can be considered as dataset prun-
ing and makes us face the philosophical question of
more data vs. better data. It has been shown that in
cases where huge labelled datasets are available, even
simple learning methods perform very well (Shotton
et al., 2011; Torralba et al., 2008; Hays and Efros,
2007). We address the opposite case, where a huge
accurately labelled data set cannot be obtained - a
common scenario both in academic and industrial
computer vision.
1.2 Contributions
We propose a two-pass boosting extension algorithm,
suggested by a weight-centric theoretical analysis of
how different boosting algorithms respond to outliers.
We also demonstrate that it is important to distin-
guish between ”hard-to-learn” examples and ”non-
learnable” outliers in vision as examples easily iden-
tified as positive by humans could be non-learnable
given a feature and weak-learner set, and demonstrate
that the different classes in VOC2007 dataset indeed
have different fractions of hard-to-learn examples us-
ing HOG as base feature. Finally we provide exten-
sive experimental comparison of different boosting al-
gorithms on real computer vision data and perform
experiments using dataset augmentation techniques,
showing that our method is complementary to jitter-
ing and hard negative mining.
2 RELATION TO PREVIOUS
WORK
As previously mentioned AdaBoost has been shown
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
12
to be sensitive to noise (Bauer and Kohavi, 1999; Di-
etterich, 2000). Other popular boosting algorithms
such as LogitBoost or GentleBoost (Friedman et al.,
2000) have softer loss functions or optimization meth-
ods and can perform better in the presence of noise in
the training data, but they have not been specifically
designed to handle this problem. It has been argued
that no convex-loss boosting algorithm is able to cope
with random label noise (Long and Servedio, 2008).
This is however not the problem we want to address,
as we focus on naturally occurring outliers and am-
biguous examples, which is a significant and interest-
ing problem in object detection today.
BrownBoost (Freund, 1999) and RobustBoost
(Freund and Science, 2009) are adaptive extensions of
the Boost-By-Majority Algorithm (Freund, 1995) and
have non-convex loss functions. Intuitively these al-
gorithms “give up” on hard examples and this allows
them to be less affected by erroneous examples.
Regularized LPBoost, SoftBoost and regularized
AdaBoost (Warmuth et al., 2008; R
¨
atsch et al., 2001)
regularize boosting to avoid overfitting to highly
noisy data. These methods add the concept of soft
margin to boosting by adding slack variables in a sim-
ilar fashion to soft-margin SVMs, and this decreases
the influence of outliers. Conceptually these methods
bear some similarity to ours as the slack variables re-
duce the influence of examples on the wrong side of
the margin, and they define an upper bound on the
fraction ν of misclassified examples, which is com-
parable to the fraction of the dataset excluded in the
second phase of training.
There is recent work on robust boosting where
new semi-convex loss functions are derived based on
probability elicitation (Masnadi-Shirazi et al., 2010;
Masnadi-shirazi and Vasconcelos, 2008; Leistner
et al., 2009). These methods have shown potential for
high-noise problems such as tracking, scene recog-
nition and artificial label noise. But they have not
been extensively compared to the common outlier-
sensitive algorithms on low-noise problems, such as
object classification, where the existing outliers are
ambiguous or uncommon examples, rather than ac-
tual label errors.
In all the mentioned robust boosting algorithms
the outliers are estimated and excluded on the fly and
these outliers are therefore able to affect the training
in the early rounds. Also, as can be seen in figure 2,
these algorithms can treat uncommon non-outliers as
conservatively as actual outliers, resulting in subopti-
mal decision boundaries.
Reducing overfitting by pruning the training set
has been studied previously (Vezhnevets and Bari-
nova, 2007; Angelova et al., 2005) but improved re-
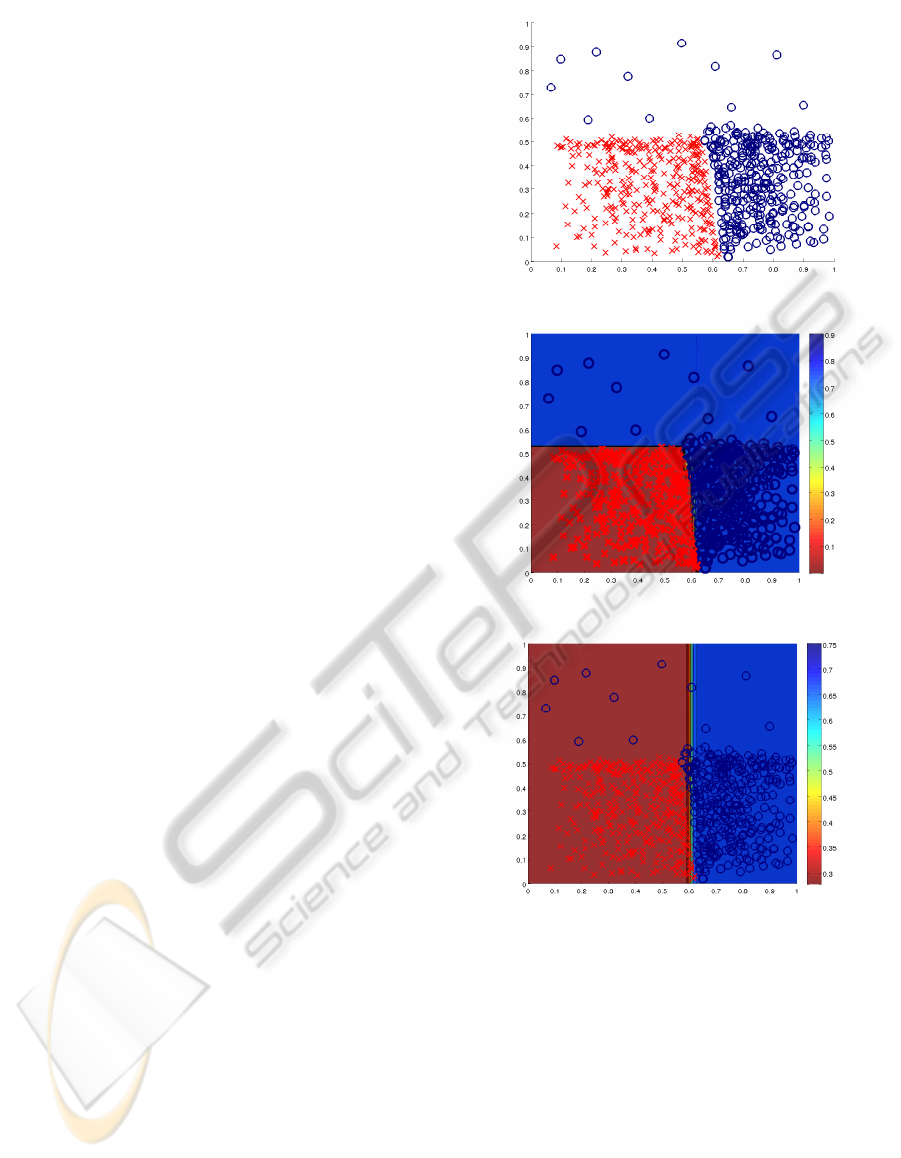
(a) Toy example without outliers
(b) Learnt AdaBoost classifier
(c) Learnt RobustBoost classifier
Figure 2: Example with hard inliers. This toy problem
shows how less dense, but learnable examples do not con-
tribute to the decision boundary when learned using Robust-
Boost. The colour coding represents estimated probability
p(y = 1|x). (Best viewed in colour.)
sults have mostly been seen in experiments where
training sets include artificial label noise. (Vezhn-
evets and Barinova, 2007) is the only method that we
have found where pruning improves performance on a
“clean” dataset. (Vezhnevets and Barinova, 2007) use
an approach very similar to ours, detecting hard-to-
learn examples, then removing those examples from
training. The base algorithm to which (Vezhnevets
and Barinova, 2007) apply dataset pruning is Ad-
ImprovedBoostingPerformancebyExclusionofAmbiguousPositiveExamples
13

aBoost, which we show is the most noise-sensitive
boosting algorithm and not the one that should be
used for image classification. When comparing to a
more robust boosting algorithm the robust non-pruned
algorithm (MadaBoost) that they use and the pruned
AdaBoost turn out to be roughly equivalent. The re-
sults show 5-4 in wins and 15.109% vs. 15.044%
in average test error when using 100 weak learn-
ers. To get an improvement using their method they
have to push the learning beyond the limit of over-
fitting by training a huge number of weak learners
(13-300 weak learners per available data dimension).
We propose a similar but more direct approach that
improves results for both robust and non-robust algo-
rithms, while still using a reasonable number of weak
learners.
Also it is important to note that vision data is typ-
ically very high-dimensional and boosting therefore
also acts as feature selection - learning much fewer
weak learners than available dimensions. Due to the
mentioned differences between vision and machine
learning datasets, it is not easy to directly transfer
the results from (Vezhnevets and Barinova, 2007) to
vision without experimental validation. Our experi-
ments on the VOC2007 dataset verify that exclusion
of ambiguous examples, as seen in our paper and
in (Vezhnevets and Barinova, 2007), translates well
to the high-dimensional problems found in computer
vision. We also compare a number of well-known
boosting algorithms using typical vision data, some-
thing that we have not seen previously.
A different but related topic that deals with label
ambiguity is Multiple Instance Learning (MIL). Viola
et al. (Viola and Platt, 2006) suggest a boosting ap-
proach to the MIL problem, applying their solution to
train an object detector with highly unaligned training
data.
Our idea is also conceptually similar to a sim-
plified version of self-paced learning (Kumar and
Packer, 2010). We treat the hard and easy positives
separately and do not let the hard examples dominate
the easy ones in the search for the optimal decision
boundary. This can seen as a heavily quantized ver-
sion of presenting the examples to the learning algo-
rithm in the order of their difficulty.
3 BOOSTING THEORY
Boosted strong classifiers have the form H
m
(x) =
∑
m
i
α
i
h(x;β
i
), where h(x) is a weak learner, with
multiplier α
i
and parameters β
i
. To learn such a
classifier one wishes to minimize the average loss
1
N
∑
N
j=1
L(H(x
j
),y
j
) over the N input data points
(x
j
,y
j
) where each data label y
j
∈ {−1, 1}. Learn-
ing the classifier that minimizes the average loss by
an exhaustive search is infeasible, so boosting al-
gorithms do this in a greedy stepwise fashion. At
each iteration the strong classifier is extended with the
weak learner that minimizes the loss given the already
learned strong classifier
α
∗
,β
∗
= argmin
α,β
1
N
N
∑
j=1
L(H
m
(x
j
) + αh(x
j
;β),y
j
).
(1)
Equation 1 is solved by weighting the importance
of the input data by a weight function w(x, y) when
learning α and β. This w(x
j
,y
j
) represents how
poorly the current classifier H
m
(x
j
) is able to classify
example j.
Different boosting algorithms have different
losses and optimizations procedures, but the key
mechanism to their behaviour and handling of outliers
is the weight function w(x, y). For this reason we be-
lieve that analyzing the weight functions of different
losses give an insight to how different boosting algo-
rithms behave in the presence of hard and ambigu-
ous examples. So in order to compare a number of
boosting algorithms in a consistent framework we re-
derive w(x, y) for each of the algorithms by following
the GradientBoost approach (Friedman, 2001; Mason
et al., 1999).
The GradientBoost approach view boosting as a
gradient based optimization of the loss in function
space. According to the GradientBoost framework a
boosting algorithm can be constructed from any dif-
ferentiable loss function, where each iteration is a
combination of a least squares fitting of a weak re-
gressor h(x) to a target w(x,y)
β
∗
= argmin
β
∑
j
(w(x
j
,y
j
) − h(x
j
;β))
2
!
, (2)
and a line search α = argmin
α
(L(H(x) + αh(x;β))) to
obtain α. The loss function is derived with respect to
the current margin v(x, y) = yH(x) to obtain the neg-
ative target function
w(x,y) = −
∂L(x,y)
∂v(x,y)
. (3)
Equation 2 can then be interpreted as finding the weak
learner that points in the direction of the steepest gra-
dient of the loss, given the data.
3.1 Convex-loss Boosting Algorithms
3.1.1 Exponential Loss Boosting
AdaBoost and GentleBoost (Freund and Schapire,
1995; Friedman et al., 2000) are the most notable al-
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
14
gorithms with the exponential loss
L
e
(x,y) = exp(−v(x, y)). (4)
AdaBoost uses weak classifiers for h(x) rather
than regressors and directly solves for α, while Gen-
tleBoost employs Newton-step optimization for the
expected loss. In the original algorithms w(x,y) is
exponential and comes in via the weighted fitting of
h(x), but we obtain
w
e
(x,y) = exp(−v(x, y)), (5)
from the GradientBoost approach to align all ana-
lyzed loss functions in the same framework. w
e
(x,y)
has a slightly different meaning than the weight func-
tion of the original algorithms since it is the tar-
get of a non-weighted fit, rather than the weight of
a weighted fit. However, its interpretation is the
same - the importance function by which an exam-
ple is weighted for the training of the weak learner
h(x). Also, it should be noted that we have omit-
ted implementation-dependent normalization of the
weight function.
3.1.2 Binomial Log-likelihood Boosting
LogitBoost is a boosting algorithm that uses Newton
stepping to minimize the expected value of the nega-
tive binomial log-likelihood
L
l
(x,y) = log(1 + exp(−2v(x,y))). (6)
This is potentially more resistant to outliers than Ad-
aBoost or GentleBoost as the binomial log-likelihood
is a much softer loss function than the exponential one
(Friedman et al., 2000).
Since the original LogitBoost optimizes this loss
with a series of Newton steps, the actual importance
of an example is distributed between a weight func-
tion for the weighted regression and a target for the
regression - both varying with the margin of the exam-
ple. We derive w(x,y) by applying the GradientBoost
approach to the binomial log-likelihood loss function
to collect the example weight in one function
w
l
(x,y) =
1
1 + exp (v(x,y))
. (7)
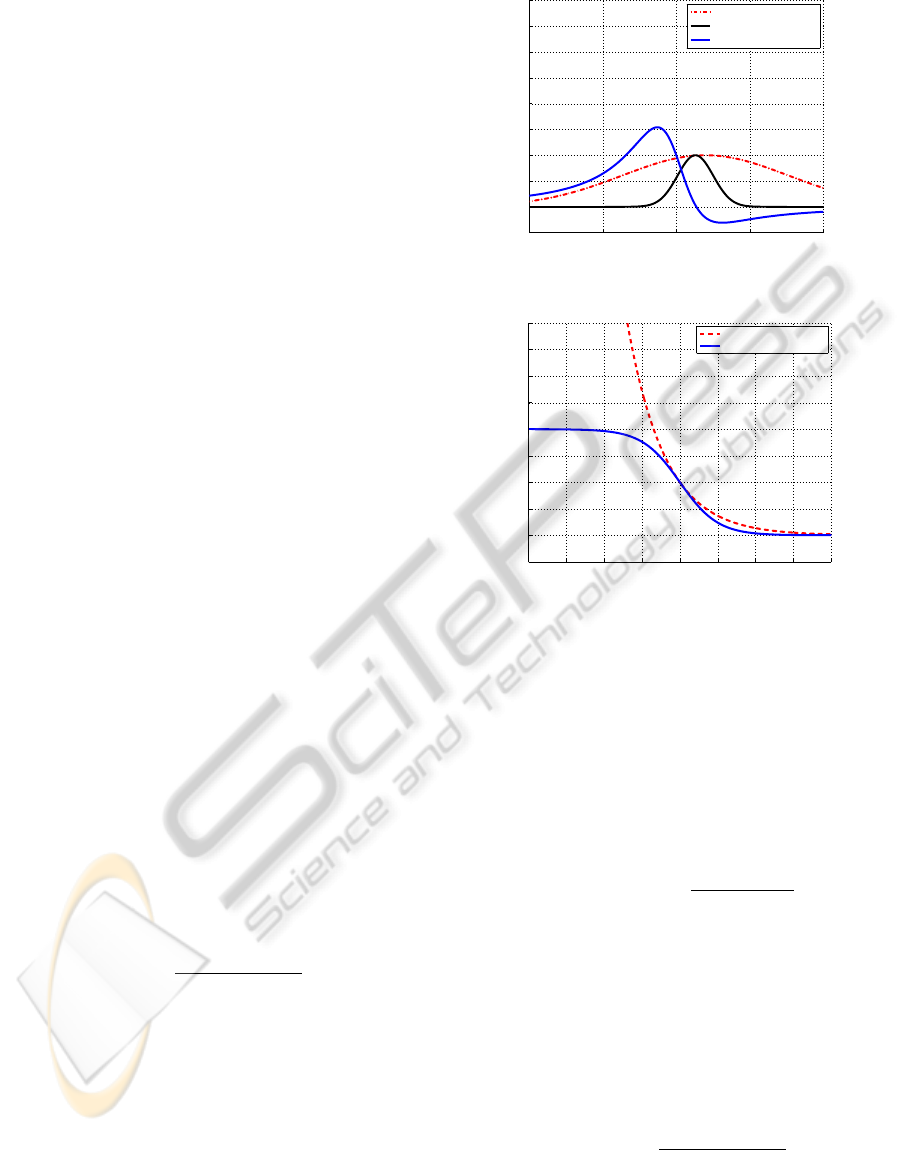
Figure 3(b) shows the different weight functions
and suggests that LogitBoost should be affected less
by examples far on the negative margin than the
exponential-loss algorithms.
3.2 Robust Boosting Algorithms
3.2.1 RobustBoost
RobustBoost is specifically designed to handle out-
liers (Freund and Science, 2009). RobustBoost, a
−4 −2 0 2 4
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Margin (yH)
Weight
RobustBoost (t=0.1)
RobustBoost (t=0.9)
TangentBoost
(a) Robust weight function
−4 −3 −2 −1 0 1 2 3 4
−0.5
0
0.5
1
1.5
2
2.5
3
3.5
4
Margin (yH)
Weight
AdaBoost/GentleBoost
LogitBoost
(b) Weight functions
Figure 3: Weight functions with respect to the margin.
This illustrates how much examples at different distances
from the margin are able to affect the decision boundary for
the different algorithms. In the GradientBoost formulation,
TangentBoost’s penalty for too correct examples results in
negative weights.
variation of BrownBoost, is based on the Boost-by-
Majority algorithm and has a very soft and non-
convex loss function
L
r
(x,y,t) = 1 − erf
v(x,y) − µ(t)
σ(t)
, (8)
where erf(·) is the error function, t ∈ [0,1] is a time
variable and µ(t) and σ(t) are functions
σ
2
(t) = (σ
2
f
+ 1) exp (2(1 −t)) − 1 (9)
µ(t) = (θ − 2ρ)exp(1 − t) + 2ρ, (10)
with parameters θ, σ
f
and ρ. Equation 8 is differ-
entiated with respect to the margin to get the weight
function
w
r
(x,y,t) = exp
−
(v(x,y) − µ(t))
2
2σ(t)
2
. (11)
Figure 3(a) shows equation 11 for some values of t.
From these we can see the RobustBoost weight func-
tion changes over time. It is more aggressive in the
ImprovedBoostingPerformancebyExclusionofAmbiguousPositiveExamples
15

beginning and as t → 1, it focuses less and less on ex-
amples far away from the target margin θ. One inter-
pretation is that the algorithm focuses on all examples
early in the training stage, and as the algorithm pro-
gresses it starts ignoring examples that it has not been
able to push close to the target margin.
RobustBoost is self-terminating in that it finishes
when t ≥ 1. In our experiments we follow Freund’s
example and set σ
f
= 0.1 to avoid numerical instabil-
ity for t close to 1 and we obtain the parameters θ and
ρ by cross-validation.
3.2.2 TangentBoost
TangentBoost was designed to have a positive
bounded loss function for both positive and nega-
tive large margins, where the maximum loss for large
positive margins is smaller than for large negative
margins (Masnadi-Shirazi et al., 2010). To satisfy
these properties the method of probability elicitation
(Masnadi-shirazi and Vasconcelos, 2008) is followed
to define TangentBoost having a tangent link function
f (x) = tan (p(x) − 0.5), (12)
and a quadratic minimum conditional risk
C
∗
L
(x) = 4p(x)(1 − p(x)), (13)
where p(x) = arctan(H(x)) + 0.5. is the intermediate
probability estimate. Combining the above equations
results in the Tangent loss
L
t
(x,y) = (2arctan(v(x,y))− 1)
2
. (14)
We immediately see that the theoretical derivation
of TangentBoost and its implementation may have to
differ as the probability estimates p(x) ∈ [−π/2 +
0.5,π/2 + 0.5] are not proper, so that we only have
proper probabilities p(x) ∈ [0,1] for
|
H(x)
|
< 0.546.
This means that
|
H(x)
|
> 0.546 has to be handled
according to some heuristic, which is not presented
in the original paper (Masnadi-Shirazi et al., 2010).
In the original paper the Tangent loss is optimized
through Gauss steps, which similarly to LogitBoost
divides the importance of examples into two func-
tions. So as with the other algorithms we re-derive
w
t
(x,y) by using the GradientBoost method, and ob-
tain
w
t
(x,y) = −
4(2arctan(v(x,y)) − 1)
1 + (v(x,y))
2
. (15)
As seen in figure 3(a) this weight function gives
low weights for examples with large negative margin,
but it also penalizes large positive margins by assign-
ing negative weight to very confident examples. Since
w
t
(x,y) is actually the regression target this means
that the weak learner tries to fit very correct exam-
ples to an incorrect label. It should be noted that
the Tangent loss is not optimized through the Gra-
dientBoost method in the original paper, but through
Gauss-Newton stepping and that the region of nega-
tive weights actually results in intermediate probabil-
ity estimates above 1.
4 A TWO-PASS EXCLUSION
EXTENSION
Our main point is that some fraction of the data, that
is easy to learn with a given feature and weak-learner
set, defines the core shape of the class - we call these
examples inliers. Then there are examples that are
ambiguous or uncommon so that they cannot be prop-
erly learned given the same representation, and trying
to do so might lead to overfitting, creating artefacts
or forcing a poorer definition of the shape of the core
of the class. We call these examples non-learnable or
outliers and illustrate their effect on training in figure
4. It is important to note that there might be hard ex-
amples with large negative margin during some parts
of training, but that eventually get learned without
overfitting. We refer to these examples as hard inliers,
and believe they are important for learning a well per-
forming classifier.
Figure 4 illustrates that even if robust algorithms
are better at coping with outliers, they are still nega-
tively affected by them in two ways; The outliers still
have an effect on the decision boundary learnt, even
if their effect is reduced. Hard inliers are also subject
to the robust losses, thus having less influence over
the decision boundary than for non-robust losses, il-
lustrated in figure 2.
We propose that outliers and inliers should be
identified and handled separately so that the outliers
are only allowed to influence the training when al-
ready close to the decision boundary and therefore
can be considered as part of the core shape of the
class. This can be achieved with a very soft loss
function, such as the logistic loss or the Bayes con-
sistent Savage loss (Masnadi-shirazi and Vasconcelos,
2008). We use the logistic loss, since the Savage loss
gives more importance to slightly misclassified exam-
ples, rather than being symmetric around the margin.
Differentiating the logistic loss
L
s
(x,y) =
1
1 + exp (−ηv(x,y))
, (16)
with respect to the margin results in the weight func-
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
16
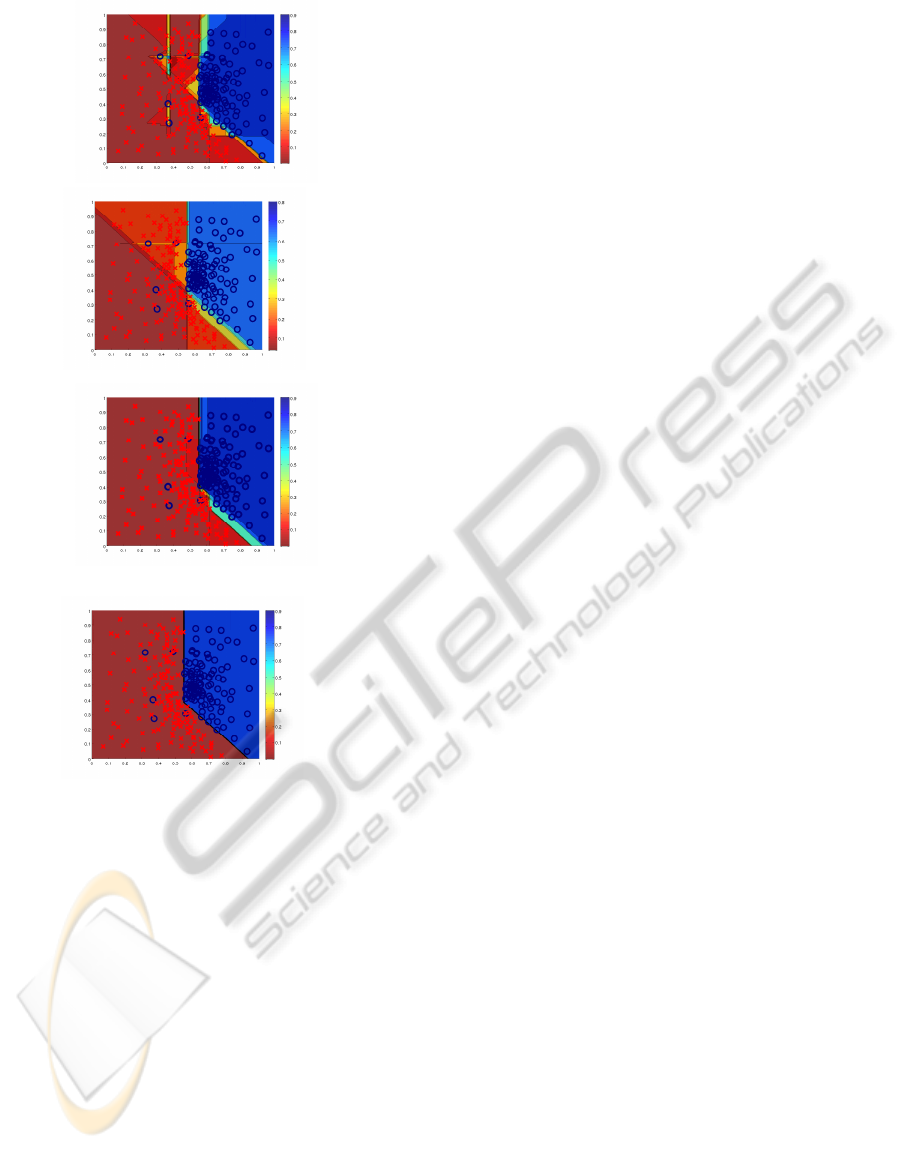
(a) AdaBoost
(b) TangentBoost
(c) RobustBoost
(d) AdaBoost with two-pass method
Figure 4: Example with five outliers. The decision bound-
aries the different algorithms produce in the presence of a
few outliers. The colour coding represents estimated prob-
ability p(y = 1|x). We can see how AdaBoost overfits to
the outliers, TangentBoost overfits slightly less and Robust-
Boost is able to handle the problem, even if it is less certain
around the boundary. Applying the two-pass method to this
problem results in a decision boundary that completely ig-
nores the outliers. (Best viewed in colour.)
tion
w
excl
(x,y) = ησ(−ηv(x,y))σ(η v(x, y)) (17)
where σ(·) is the sigmoid function. This weight func-
tion can be made arbitrarily thin by increasing the η
parameter. We call this function the exclusion func-
tion, as its purpose is to exclude outliers from train-
ing.
Since the inlier examples are considered learnable
we want the difficult examples in the inlier set to have
high weight, according to the original idea of boost-
ing. For this reason all inliers should be subjected to
a more aggressive loss such as the exponential loss or
the binomial log-likelihood loss.
The main challenge is to identify the outliers in a
dataset. To do this we follow our definition of outliers
as non-learnable and say that they are the examples
with the lowest confidence after completed training.
We therefore define the steady-state difficulty d(x
j
)
of the examples as their negative margin −v(x
j
,y
j
)
after a fully completed training round, and normalize
to get non-zero values.
d(x
j
) =
(
max(H(x)) − H(x
j
) if y
j
= 1
H(x
j
) − min(H(x)) if y
j
= −1,
(18)
where H(x
j
) is the classification score of example j.
This is referred to as the first pass.
We order the positive examples according to their
difficulty d(x
j
) and re-train the classifier, assigning a
fraction δ of the most difficult examples to the out-
lier set and subjecting them to the logistic loss func-
tion. This second iteration of training is what we call
the second pass. Figure 1 shows some inlier and out-
lier examples for the bottle and chair classes. As we
have mentioned, what will be considered an outlier
depends on the features used. We use HOG in our ex-
periments (Dalal and Triggs, 2005), so it is expected
that the tilted bottles and the occluded ones are con-
sidered outliers, since HOG cannot capture such vari-
ation well.
As previously mentioned, our model for outlier
exclusion has two parameters: δ and η, where δ con-
trols how many examples will be considered as out-
liers and η controls how aggressively the outlier ex-
amples will be down-weighted. In our experiments
we choose a large value for η - effectively ignoring
outliers completely in the second round. The actual
fraction of outliers is both class and feature depen-
dent, so δ needs to be properly tuned. We tune δ
by cross-validation, yet we have noticed that sim-
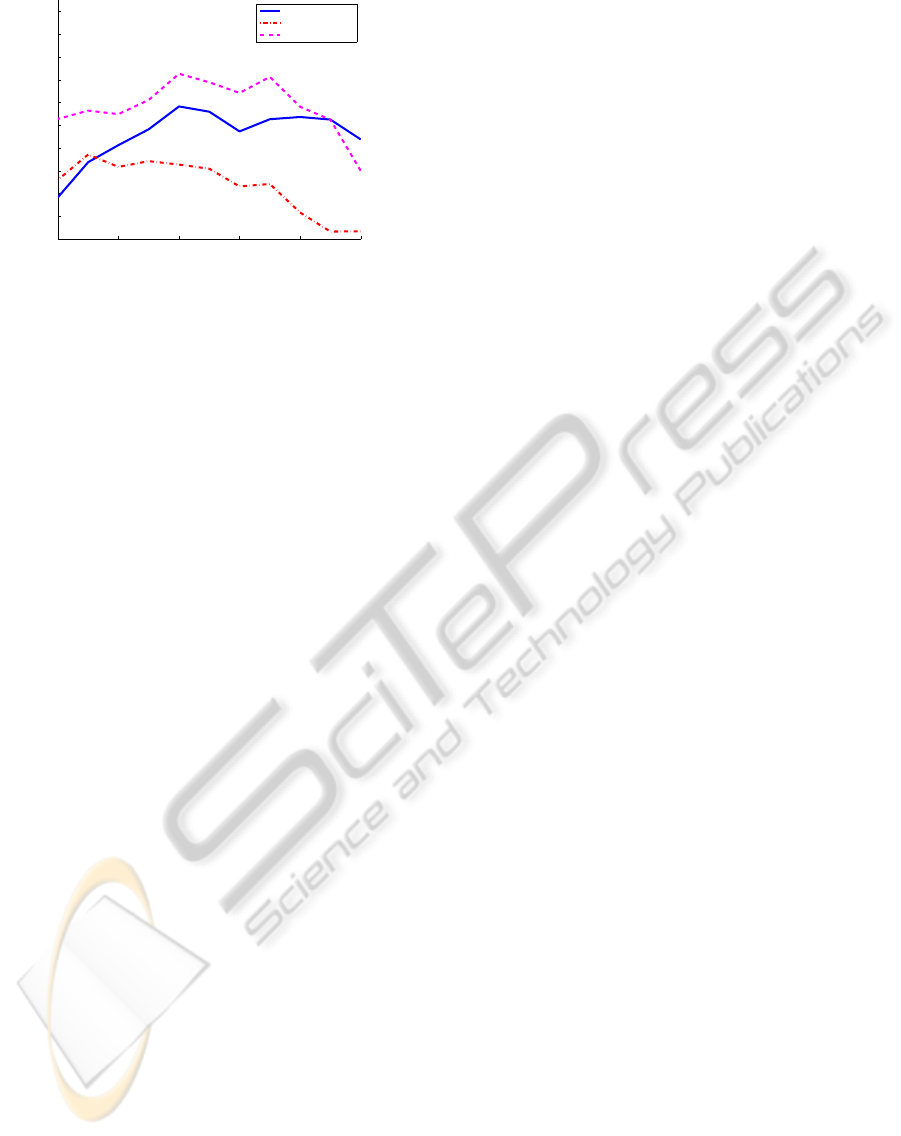
ple heuristics seem to work quite well too. Figure
5 shows how the performance is affected by δ for
three different classes. We can clearly see that differ-
ent classes have different optimal values for δ, which
is related to the number of outliers in their datasets,
given the used features and learners.
5 EXPERIMENTS
We perform experiments on a large number of classes
to reduce the influence of random performance fluc-
tuations. For this reason, and due to the availabil-
ity of a test set we select the VOC2007 dataset for
ImprovedBoostingPerformancebyExclusionofAmbiguousPositiveExamples
17
0 0.1 0.2 0.3 0.4 0.5
0.73
0.74
0.75
0.76
0.77
0.78
0.79
0.8
0.81
0.82
0.83
Exclusion fraction (δ)
Average precision
Motorbike class
Aeroplane class
Bottle class
Figure 5: Performance for different exclusion fractions
δ. Average precision on the test set, using the two-pass ex-
tension with LogitBoost for different exclusion fractions δ
and different classes. This figure illustrates that different
classes have different optimal exclusion fractions δ.
our experiments. Positive examples have bounding-
box annotations, so we crop and resize all positive
examples to have the same patch size. Since our
main focus is to investigate how our two-pass exclu-
sion method improves learning, we want to minimize
variance or tweaking in the areas not related to learn-
ing, and therefore choose a static non-deformable fea-
ture. We use the HOG descriptor (Dalal and Triggs,
2005) to describe the patches, since it has shown good
performance in the past, is popular within the vision
community, and its best parameter settings have been
well established.
To get the bounding boxes for the negative ex-
amples, we generate random positions, widths and
heights. We make sure that box sizes and aspect ra-
tios are restricted to values that are reasonable for the
positive class. Image patches are then cropped from
the negative training set according to the generated
bounding boxes. The patches are also resized to have
the same size as the positive patches, after which the
HOG features are computed. We then apply our two-
pass training procedure described in section 4 to train
a boosted stump classifier.
We train boosted stumps using four different
boosting algorithms: AdaBoost, LogitBoost, Robust-
Boost and TangentBoost. AdaBoost and LogitBoost
are chosen for their popularity and proliferation in the
field, and RobustBoost and TangentBoost are chosen
as they explicitly handle outliers. We also train an
SVM classifier to use as reference.
For LogitBoost, AdaBoost and TangentBoost
there are no parameters to be set. For RobustBoost
two parameters have to be tuned: the error goal ρ
and the target margin θ. We tune them by holdout
cross-validation on the training set. With Tangent-
Boost we encountered an implementation issue, due
to the possibility of negative weights and improper
probability estimates. After input from the author of
(Masnadi-Shirazi et al., 2010) we manually truncate
the probability estimates to make them proper. Unfor-
tunately this forces example weights to zero for mar-
gins
|
v(x,y)
|
> 0.546, which gives poor results as this
quickly discards a large portion of the training set. To
cope with this and to obtain reasonable performance
we lower the learn rate of the algorithm. The linear
SVM is trained with liblinear (Fan et al., 2008), with
normalized features and using 5-fold cross-validation
to tune the regularization term C.
Jittering the positive examples is a popular way
of bootstrapping the positive dataset, but we believe
that this can also generate examples that are not rep-
resentative of that class. For this reason our two-
pass approach should respond well to jittered datasets.
We therefore redo the same experiments for the best
performing classifier, augmenting the positive sets by
randomly generating 2 positive examples per labelled
positive example, with small random offsets in posi-
tions of the bounding box. We also mine for hard
negatives to get a complete picture of how the out-
lier exclusion extension interacts with bootstrapping
methods.
6 RESULTS
A summary of our results is that all boosting al-
gorithms except TangentBoost show consistent im-
provements for the experiments using our two-pass
extension, which can be seen in table 1. Before em-
ploying our two-pass extension LogitBoost performs
best with 11 wins over the other algorithms. After
the two-pass outlier exclusion LogitBoost dominates
even more with 15 wins over other outlier-excluded
algorithms and 13 wins over all other algorithms, in-
cluding LogitBoost without outlier exclusion.
6.1 Comparison of Boosting Algorithms
Table 1 also includes a comparison of the perfor-
mance between algorithms, showing performance
differences with and without the outlier exclusion.
Among the convex-loss algorithms LogitBoost per-
forms better than AdaBoost. The difference in per-
formance shrinks when our two-pass method is ap-
plied, which suggests that naturally occurring outliers
in real-world vision data affects the performance of
boosting algorithms and that those better able to cope
with such outliers have a greater potential for good
performance.
Even so, the robust algorithms perform worse than
LogitBoost. One reason for this could be that the ro-
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
18

Table 1: Performance of our experiments. Average Precisions of different classifiers, when applied to the VOC2007 test
set. The red box on each row indicates the best performing classifier for the object class. Boldface numbers indicate best
within-algorithm-performance for excluding outliers or not. Red cells indicate total best performance for a given class. Wins
within algorithm (WWA) summarizes how often a learning method is improved by our extension, and Wins between algorithms
(WBA) summarizes how often an algorithm outperforms the others when having the same strategy for handling outliers. Note
that these results cannot be directly compared to results from the original VOC2007 challenge since we are performing image
patch classification, using the annotated bounding boxes to obtain positive object positions.
mean Average Precision for each Algorithm
Adaboost LogitBoost RobustBoost TangentBoost Linear SVM
Class Use all Exclude Diff Use all Exclude Diff Use all Exclude Diff Use all Exclude Diff Use all Exclude Diff
plane 74.27 73.87 −0.40 73.13 74.09 0.97 72.49 72.23 −0.27 73.86 72.88 −0.98 74.04 72.01 −2.03
bike 87.59 88.24 0.66 87.85 88.43 0.58 86.86 87.98 1.12 86.81 86.80 −0.01 85.12 84.47 −0.66
bird 46.69 48.14 1.45 48.08 49.87 1.79 46.66 48.69 2.03 46.97 49.45 2.48 46.67 46.32 −0.34
boat 57.33 58.96 1.63 59.01 60.81 1.80 57.92 58.31 0.39 58.61 58.02 −0.59 57.00 56.94 −0.06
bottle 74.57 78.56 3.99 76.02 80.00 3.98 72.74 78.94 6.20 76.79 78.32 1.53 76.22 76.97 0.75
bus 86.79 86.18 −0.62 86.54 86.96 0.42 83.86 86.82 2.96 85.97 86.26 0.29 82.07 81.85 −0.22
car 87.05 87.73 0.68 88.32 88.32 0.00 88.26 88.14 −0.11 88.34 88.30 −0.04 86.22 85.93 −0.29
cat 49.45 49.18 −0.27 50.15 52.44 2.29 48.30 52.21 3.91 45.93 50.90 4.97 45.45 45.48 0.02
chair 67.68 69.36 1.68 68.26 69.93 1.66 66.06 68.91 2.85 67.42 68.09 0.67 64.08 63.94 −0.14
cow 81.90 83.25 1.35 81.99 83.85 1.87 81.83 82.71 0.87 81.50 80.63 −0.87 82.01 82.44 0.43
table 40.89 44.50 3.61 43.68 47.91 4.24 39.89 46.26 6.37 47.52 36.34 −11.18 28.35 28.09 −0.26
dog 47.83 51.56 3.73 51.27 51.68 0.41 47.66 52.24 4.58 51.25 50.21 −1.04 46.16 46.94 0.78
horse 76.09 76.10 0.01 78.83 78.84 0.01 77.72 78.28 0.56 75.20 76.20 1.00 75.55 75.77 0.21
motorbike 74.15 77.15 3.00 77.39 78.33 0.94 76.75 79.20 2.45 75.16 75.46 0.30 73.31 72.56 −0.76
person 58.56 63.64 5.08 65.16 67.03 1.87 60.17 65.09 4.92 66.04 67.02 0.98 60.86 61.84 0.98
plant 58.08 57.60 −0.48 60.46 60.51 0.04 56.87 59.62 2.75 59.28 58.23 −1.05 58.42 58.90 0.48
sheep 80.60 84.41 3.81 81.59 83.11 1.53 80.78 80.11 −0.66 84.38 82.01 −2.37 80.07 80.17 0.10
sofa 61.83 66.28 4.44 62.35 66.66 4.31 63.92 67.81 3.89 56.73 63.06 6.33 62.33 62.18 −0.15
train 73.18 76.91 3.74 73.98 76.74 2.75 73.13 77.26 4.13 73.87 74.74 0.87 71.82 72.10 0.28
tv 92.11 92.11 0.00 92.57 92.57 0.00 91.97 91.97 0.00 91.69 91.69 0.00 91.28 91.28 0.00
mean 68.83 70.69 1.85 70.33 71.90 1.57 68.69 71.14 2.45 69.67 69.73 0.06 67.35 67.31 −0.04
WWA 4 15 - 0 18 - 3 16 - 9 10 - 10 9 -
WBA 2 1 - 11 15 - 1 4 - 5 0 - 1 0 -
Table 2: Outlier exclusion with other dataset augmentation techniques. Positive jittering (J) and hard negative mining
(HN) improves performance even more in combination with outlier exclusion (OE).
mean Average Precision for each Object Class
Method plane bike bird boat bottle bus car cat chair cow table dog horse motor-
bike
person plant sheep sofa train tv mean
Default 73.13 87.85 48.08 59.01 76.02 86.54 88.32 50.15 68.26 81.99 43.68 51.27 78.83 77.39 65.16 60.46 81.59 62.35 73.98 92.57 70.33
J 75.64 87.33 49.34 57.59 76.68 88.69 88.29 49.95 68.28 83.63 48.25 51.87 79.78 77.83 66.17 63.59 82.86 64.51 78.08 92.55 71.55
J+OE 77.18 87.56 50.30 60.32 79.54 89.73 89.62 50.64 68.75 84.73 50.39 55.09 79.33 79.68 67.73 62.83 83.71 67.65 75.79 92.55 72.66
J+HN 76.31 87.35 50.85 61.10 80.08 89.41 89.62 51.23 68.93 84.88 49.35 53.08 80.90 79.67 65.78 61.98 81.39 64.07 76.18 92.98 72.26
J+HN+OE 77.73 87.46 48.60 59.76 80.67 89.37 90.07 53.76 70.11 86.55 51.24 53.99 80.92 77.78 67.54 62.39 85.60 66.83 77.38 92.98 73.04
bust algorithms make no distinction between outliers
and hard inliers, as previously discussed. Our two-
pass algorithm only treats ”non-learnable” examples
differently, not penalizing learnable examples for be-
ing difficult in the early stages of learning.
Although RobustBoost has inherent robustness, it
is improved the most by our extension. One expla-
nation is its variable target error rate ρ, which af-
ter the exclusion of outliers obtains a lower value
through cross-validation. RobustBoost with a small
value ρ is more similar to a non-robust algorithm,
and should not suffer as much from the hard-inlier-
problem demonstrated in figure 2(c).
The SVM classifier is provided as a reference
and sanity check, and we see that the boosting algo-
rithms give superior results even though only decision
stumps are used.
The higher performance of the boosted classifier
is likely due to that combination of decision stumps
can produce more complex decision boundaries than
the hyperplane of a linear SVM. It is not surprising
that the linear SVM is not improved by the outlier
exclusion as it has a relatively soft hinge loss, tuned
soft margins, and lacks the iterative reweighting of ex-
amples and greedy strategy, that our argumentation is
based on.
ImprovedBoostingPerformancebyExclusionofAmbiguousPositiveExamples
19

6.2 Bootstrapping Methods in Relation
to Outlier Exclusion
We can see in table 2 that jittering has a positive effect
on classifier performance and that our outlier exclu-
sion method improves that performance even more.
This shows that our two-pass outlier exclusion is com-
plementary to hard negative mining and positive jitter-
ing and could be considered as a viable data augmen-
tation technique when using boosting algorithms.
7 DISCUSSION AND FUTURE
WORK
We show that all boosting methods, except Tangent-
Boost, perform better when handling outliers sepa-
rately during training. As neither TangentBoost nor
RobustBoost reach the performance of LogitBoost
without outlier exclusion they might be too aggressive
in reducing the importance of hard inliers and not ag-
gressive enough for outliers. We must remember that
the problem addressed by the VOC2007 dataset does
not include label noise, but does definitely have hard
and ambiguous examples that might interfere with
learning the optimal decision boundary. Both Tan-
gentBoost and RobustBoost have previously shown
good results on artificially flipped labels, but we be-
lieve that a more common problem in object classifi-
cation is naturally occurring ambiguous examples and
have therefore not focused on artificial experiments
where labels are changed at random.
We notice that the improved performance from
excluding hard and ambiguous examples is corre-
lated with the severity of the loss function of the
method. AdaBoost, with its exponential loss func-
tion, shows large improvement down to TangentBoost
having almost no improvement at all. LogitBoost has
less average gain from the exclusion of outliers than
AdaBoost, but still achieves the best overall perfor-
mance when combined with the two-pass approach.
More surprising is that RobustBoost is improved the
most, in spite of its soft loss function. One explana-
tion is that there is an additional mechanism at work
in improving the performance of RobustBoost. Ro-
bustBoost is self-terminating, stopping when it has
reached its target error. When training on a dataset
with a smaller fraction non-learnable examples, it is
more likely to end up at a much lower target error,
which makes it more similar to other boosting algo-
rithms and lets it add more weak learners before ter-
minating.
We have seen that pruning of the hard-to-learn ex-
amples in a dataset without label noise can lead to
improved performance, contrary to the “more data is
better” philosophy. Our belief is that our method re-
moves bad data, but also that it reduces the impor-
tance of examples that make the learning more dif-
ficult, in this way allowing the boosting algorithms
to find better local minima. We still believe that more
data is better if properly handled, so this first approach
of selective example exclusion should be extended in
the future, and might potentially combine well with
positive example mining, especially in cases where
the quality of the positives cannot be guaranteed.
8 CONCLUSIONS
We provide an analysis of several boosting algorithms
and their sensitivity to outlier data. Following this
analysis we propose a two-pass training extension that
can be applied to boosting algorithms to improve their
tolerance to naturally occurring outliers. We show ex-
perimentally that excluding the hardest positives from
training by subjecting them to an exclusive weight
function is beneficial for classification performance.
We also show that this effect is complementary to jit-
tering and hard negative mining, which are common
bootstrapping techniques.
The main strength of our approach is that clas-
sification performance is improved without any ex-
tra test-time cost, only at the expense of training-
time cost. We believe that handling the normal and
hard examples separately might allow bootstrapping
of training sets with less accurate training data.
We also present results on the VOC2007 dataset,
comparing the performance of different boosting al-
gorithms on real world vision data, concluding that
LogitBoost performs the best and that some of this
difference in performance can be due to its ability to
better cope with naturally occurring outlier examples.
ACKNOWLEDGEMENTS
This work has been funded by the Swedish Founda-
tion for Strategic Research (SSF); within the project
VINST
REFERENCES
Angelova, A., Abu-Mostafam, Y., and Perona, P. (2005).
Pruning training sets for learning of object categories.
In CVPR.
ICPRAM2013-InternationalConferenceonPatternRecognitionApplicationsandMethods
20

Bauer, E. and Kohavi, R. (1999). An empirical comparison
of voting classification algorithms: Bagging, boost-
ing, and variants. MLJ.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In CVPR.
Dietterich, T. (2000). An experimental comparison of three
methods for constructing ensembles of decision trees:
Bagging, boosting, and randomization. MLJ.
Fan, R., Chang, K., Hsieh, C., Wang, X., and Lin, C. (2008).
LIBLINEAR: A library for large linear classification.
JMLR.
Felzenszwalb, P., Girshick, R. B., McAllester, D., and Ra-
manan, D. (2010). Object detection with discrimina-
tively trained part-based models. PAMI.
Freund, Y. (1995). Boosting a weak learning algorithm by
majority. IANDC.
Freund, Y. (1999). An adaptive version of the boost by ma-
jority algorithm. In COLT.
Freund, Y. and Schapire, R. (1995). A decision-theoretic
generalization of on-line learning and an application
to boosting. In COLT.
Freund, Y. and Science, C. (2009). A more robust boosting
algorithm. arXiv:0905.2138.
Friedman, J. (2001). Greedy function approximation: a gra-
dient machine. AOS.
Friedman, J., Hastie, T., and Tibshirani, R. (2000). Additive
logistic regression: a statistical view of boosting. AOS.
Grove, A. and Schuurmans, D. (1998). Boosting in the
limit: Maximizing the margin of learned ensembles.
In AAAI.
Hays, J. and Efros, A. (2007). Scene completion using mil-
lions of photographs. TOG.
Kumar, M. P. and Packer, B. (2010). Self-paced learning for
latent variable models. In NIPS.
Kumar, M. P., Zisserman, A., and Torr, P. H. S. (2009). Ef-
ficient discriminative learning of parts-based models.
In ICCV.
Laptev, I. (2009). Improving object detection with boosted
histograms. IVC.
Leistner, C., Saffari, A., Roth, P. M., and Bischof, H.
(2009). On robustness of on-line boosting - a com-
petitive study. In ICCV Workshops.
Long, P. M. and Servedio, R. A. (2008). Random classifi-
cation noise defeats all convex potential boosters. In
ICML.
Masnadi-Shirazi, H., Mahadevan, V., and Vasconcelos, N.
(2010). On the design of robust classifiers for com-
puter vision. In CVPR.
Masnadi-shirazi, H. and Vasconcelos, N. (2008). On the
design of loss functions for classification: theory, ro-
bustness to outliers, and savageboost. In NIPS.
Mason, L., Baxter, J., Bartlett, P., and Frean, M. (1999).
Boosting algorithms as gradient descent in function
space. In NIPS.
R
¨
atsch, G., Onoda, T., and M
¨
uller, K. (2001). Soft margins
for AdaBoost. MLJ.
Shotton, J., Fitzgibbon, A., Cook, M., Sharp, T., Finocchio,
M., Moore, R., Kipman, A., and Blake, A. (2011).
Real-time human pose recognition in parts from single
depth images. In CVPR.
Torralba, A., Fergus, R., and Freeman, W. T. (2008). 80
Million Tiny Images: a Large Data Set for Nonpara-
metric Object and Scene Recognition. PAMI.
Vezhnevets, A. and Barinova, O. (2007). Avoiding boosting
overfitting by removing confusing samples. In ECML.
Vijayanarasimhan, S. (2011). Large-scale live active learn-
ing: Training object detectors with crawled data and
crowds. In CVPR.
Viola, P. and Platt, J. (2006). Multiple instance boosting for
object detection. In NIPS.
Warmuth, M., Glocer, K., and R
¨
atsch, G. (2008). Boosting
algorithms for maximizing the soft margin. In NIPS.
ImprovedBoostingPerformancebyExclusionofAmbiguousPositiveExamples
21
