
Non-linear System Identification by a Fuzzy Takagi-Sugeno
System Approach based on Reusable Fuzzified Inputs
Cristian Guarnizo Lemus
1
and Alejandro Restrepo Martinez
2
1
Research Center, Metropolitan Institute of Technology, Medell´ın, Colombia
2
Faculty of Engineering, Pascual Bravo University Institute, Medell´ın, Colombia
Keywords:
Takagi-Sugeno Fuzzy Models, System Identification.
Abstract:
An approach to fuzzy identification of discrete time nonlinear dynamical systems based on the Takagi-Sugeno
(TS) model with a economical computation formulation is proposed. Number of rules and membership func-
tions positions are fixed for all inputs. This allows to avoid the fuzzification proccess of delayed inputs.
Rule base evaluation is avoided for delayed inputs by the Reusable Fuzzified Inputs approach. Consequent
parameters are trained or estaimated using least squares approach. This method is intended to be trained in
an off-line manner and used in programmable devices. Finally, simulations are performed on two diffrerent
problems, the approach shows consistency, tracking of the output that vary with time and a high accuracy of
the output estimate, properties requiered in control design applications.
1 INTRODUCTION
One of the many advantages of Fuzzy Inference Sys-
tems (FIS) is that they can be used to approximate
closely any nonlinear input-output mapping by means
of a series of IF-THEN rules (Rong et al., 2006).
One of the major tasks in the design of FIS is the
structure identification. Structure identification deter-
mines the input-outputspace partition, antecedentand
consequent variables of IF-THEN rules, number of
such rules, and initial positions of membership func-
tions (Rong et al., 2006). The input-output space
partition and initial positions of membership func-
tions has been optimized using genetic algorithms
(Surmann and Maniadakis, 2001), clustering tech-
niques(Serra, 2010) and adaptive procedures (Bot-
tura and de Oliveira Serra, 2004). The adjustment
of consequent parameters and rules generation are
based on adaptive techniques, such as (Nounou and
Nounou, 2005), (Rong et al., 2006), (Rezaee and
Zarandi, 2010) and (Abdelazim and Malik, 2005).
Most of these approaches require a learning rule to
adjust the parameters, increasing the calculation ef-
fort for the identification task. Some devices, such as,
programmable logic controllers and microcontrollers
are not enough fast and memory availableto run adap-
tive Takagi-Sugeno systems for the identification of
nonlinear systems.
This paper proposes an approach to fuzzy identifi-
cation of discrete-time nonlinear dynamical systems.
Based on the Takagi-Sugeno model, with a suitable
formulation for off-line scheme identification. Con-
sequent parameters are estimated by the least square
method. Computational load is reduced by fixing
the number of rules and the positions of membership
functions at delayed version of inputs. The concept of
reusable fuzzified inputs is introduced for the reduc-
tion of fuzzification calculations. Finally an approach
that can be easily implemented on programmablecon-
trollers is presented.
2 TAKAGI-SUGENO SYSTEM
The Fuzzy Takagi-Sugeno (TS) model, was first intro-
duced in (Takagi and Sugeno, 1985), this method has
been successfully applied to the problem of non-linear
identification (Abdelazim and Malik, 2005). Assume
a sequence of input-output {x[k],y[k]}, k = 1,...,K
data is collected, the output y ∈ R and the vector of
inputs x ∈ R
q
which contains the premises variables.
Each input q is distributed over the interval [a
q
,b
q
]
and partitioned by N
q
membership functions F
k
q
, for
k = 1,... ,N
q
. The TS model is composed of a fuzzy
IF-THEN rule base generated by using all possible
combinations among the antecedents and the AND
operator. The l-th TS rule has the following form:
424
Guarnizo Lemus C. and Restrepo Martinez A..
Non-linear System Identification by a Fuzzy Takagi-Sugeno System Approach based on Reusable Fuzzified Inputs.
DOI: 10.5220/0004157904240428
In Proceedings of the 4th International Joint Conference on Computational Intelligence (FCTA-2012), pages 424-428
ISBN: 978-989-8565-33-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

R
l
: IF x
1
is F
l
1
AND .. . AND x
q
is F
l
q
THEN y
l
= f
l
(x), l = 1,2, ...,L (1)
where L is the total number of rules. Additionally,
each premise variable x
j
generates a truth value given
by a membership function µ
l
j
. Thus, the truth value µ
l
for the complete rule l is computed as:
µ
l
(x) =
q
∏
j=1
µ
l
j
(x
j
) (2)
the normalized degree of activation for rule l is
w
l
(x) =
µ
l
(x)
L
∑
l=1
µ
l
(x)
the general expression for the output of the fuzzy TS
system with L rules is given by
f(x) =
L
∑
l=1
w
l
(x)y
l
(3)
this output can be seen as a linear parameter varying
(LPV) system (Bottura and de Oliveira Serra, 2004).
Also, the consequent part is an affine dynamic model,
which has several advantages (Johansen et al., 2000).
This two properties makes TS models in a robust li-
near system framework ideal for identification tasks.
A general schematic representation of the process ex-
plained before is summarized in figure 1.
µ
l
j
(x)
Inference
Fuzzy Rule Base
w
l
(x)
x
f(x)
Figure 1: General schematic representation of TS fuzzy in-
ference system.
2.1 Fuzzy Structure Model Approach
Most of fuzzy models for identification of discrete-
time nonlinear systems are based on nonlinear au-
toregressive with exogenous input (NARX) structure
model (Bottura and de Oliveira Serra, 2004). The
NARX model establishes a relation between past
input-output data and the predicted output
ˆy[k+ 1] =H (y[k], .. . ,y[k− n
y
+ 1],u[k],.. .
.. ., u[k − n
u
+ 1])
(4)
where H() is a nonlinear function, k denotes the cur-
rent discrete time sample, n
y
and n
u
are integers re-
lated to the delay order of output and input samples,
respectively. In terms of rules, the function f
l
(x)
given in equation 1 is
f
l
(x) =
n
y
∑
j=1
α
l
j
y[k− j] +
n
u
∑
j=1
β
l
j
u[k− j] + c
l
(5)
where α
l
j
and β
l
are the consequent parameters at
fuzzy output for each rule l. In this sense, x =
[y[k−1],..., y[k− n
y
],u[k−1],. ..,u[k−n
u
]], with q =
n
y
+ n
u
. The nonlinear system presented in equation
4 can be approximated by the linear combination de-
fined in equation 3, as follows
ˆy[k+ 1] =
L
∑
l=1
w
l
(x) f
l
(x) (6)
this equation is the standard form to represent TS
fuzzy system for the approximation of discrete-time
nonlinear systems. Here we propose a different
method. First we assume that equation 4 has the fo-
llowing form
ˆy[k] =H
1
(y[k− 1]) + . .. + H
n
y
(y[k− n
y
])+
G
1
(u[k− 1]) + . ..+ G
n
u
(u[k− n
u
])
(7)
where H
k
y
() and G
k
u
() are nonlinear functions, with
k
y
= 1,... , n
y
and k
u
= 1,... ,n
u
. Thus, each nonlinear
function can be approximated by its input variable,
for example, H
1
(y[k]) can be approximated by a TS
fuzzy system with input y[k]. Managing one input to
approximate an output reduce the complexity of the
rule base. Each rule l per input has the form
R
l
: IF x
1
is F
l
1
THEN y
l
= f
l
(x), l = 1,2, ...,L
in this case, L equals the number of member-
ship functions that partition the input space. More-
over, each rule has only one antecedent, then, the
calculation required in equation 2 is avoided, be-
cause there are no AND connectors. Furthermore,
to reduce more computations, we assume that in-
put variables u[k − 1],. .. ,u[k − n
u
] are equally parti-
tioned with N
u
membership functions over the inter-
val [a
u
,b
u
]. The latter is also extended to output vari-
ables y[k− 1],... ,y[k− n
y
], but they are equally parti-
tioned with N
y
membership functions overthe interval
[a
y
,b
y
]. If u[k] and u[k − 1] has the same member-
ship functions configuration, then a delayed version
of µ
l
(u[k]) will serve to evaluate the rule base system
of u[k− 1], and the process goes on and on. The last
relation can be expressed as
µ
l
(u[k− 1]) = z
−1
µ
l
(u[k])
where z
−1
is the unit delay operator. This allows to
overcome the calculation of truth values µ
l
() for de-
layed versions of input and output variables. The lat-
ter concept, we name it, reusable fuzzified inputs, be-
cause we re-use the fuzzified input values. A system-
atic view of our approach is shown in 2.
Non-linearSystemIdentificationbyaFuzzyTakagi-SugenoSystemApproachbasedonReusableFuzzifiedInputs
425

µ
l
(u[k− 1])
I. Engine
Fuzzy Rule Base
w
l
(u[k− 1])
z
−1
I. Engine
µ
l
(y[k− 1])
I. Engine
w
l
(u[k− 2])
z
−1
I. Engine
w
l
(y[k− 1])
w
l
(y[k− 2])
u[k− 1]
y[k− 1]
ˆ
H
1
(u([k− 1]))
ˆ
H
2
(u([k− 2]))
ˆ
G
1
(y([k− 1]))
ˆ
G
2
(y([k− 2]))
Figure 2: Schematic view of TS fuzzy approach.
2.2 Consequent Parameters Estimation
with Least Squares
In this paper, we assume a fixed number of rules L for
each input. Thus, combining equations 6, 5 and 7, the
problem estimation can be expressed as
ˆy[k] =
L
∑
l=1
n
y
∑
i=1
w
l
i
y[k− i]α
l
i
+
n
u
∑
i=1
w
l
n
y
+i
u[k− i]β
l
i
!
= w
k
Θ
(8)
where w
k
, is the row k of matrix W, and is defined as
w
k
=[w
1
1
y[k− 1],. ..,w
L
1
y[k− 1],w
1
2
y[k− 2],. ..,
w
L
n
y
y[k− n
y
],w
1
n
y
+1
u[k− 1],...,w
L
n
y
+n
u
u[k− n
u
]]
and
Θ = [α
1
1
,. .. , α
L
1
,α
1
2
,. .. , α
L
n
y
,β
1
1
,. .. , β
L
n
u
]
T
The whole set of output Y can be calculated
Y = WΘ + E
where vector E is the approximation error. Using
least squares, the vector parameter Θ that minimize
the norm of vector E is calculated by the following
expression (Espinosa et al., 2004)
Θ =
W
T
W
−1
Y
T
W
3 RESULTS
In this section, some simulations will be presented in
order to illustrate the advantages of the proposed ap-
proach in identification for control applications. The
criterion of mean square error (MSE) is used to mea-
sure the performance of our approach for fuzzy mod-
elling. MSE is defined as
MSE =
1
K
K
∑
k=1
(y[k] − ˆy[k])
2
Two different experiments are performed to eval-
uate this approach. For both experiments, the number
of rules L is changed, and a summary performance
from results is shown and analysed. Membership
functions are configured as triangular form and po-
sitioned in a way that the whole discourse universe of
each input variable is covered. Procedures were im-
plemented and tested in Matlab using Fuzzy Toolbox.
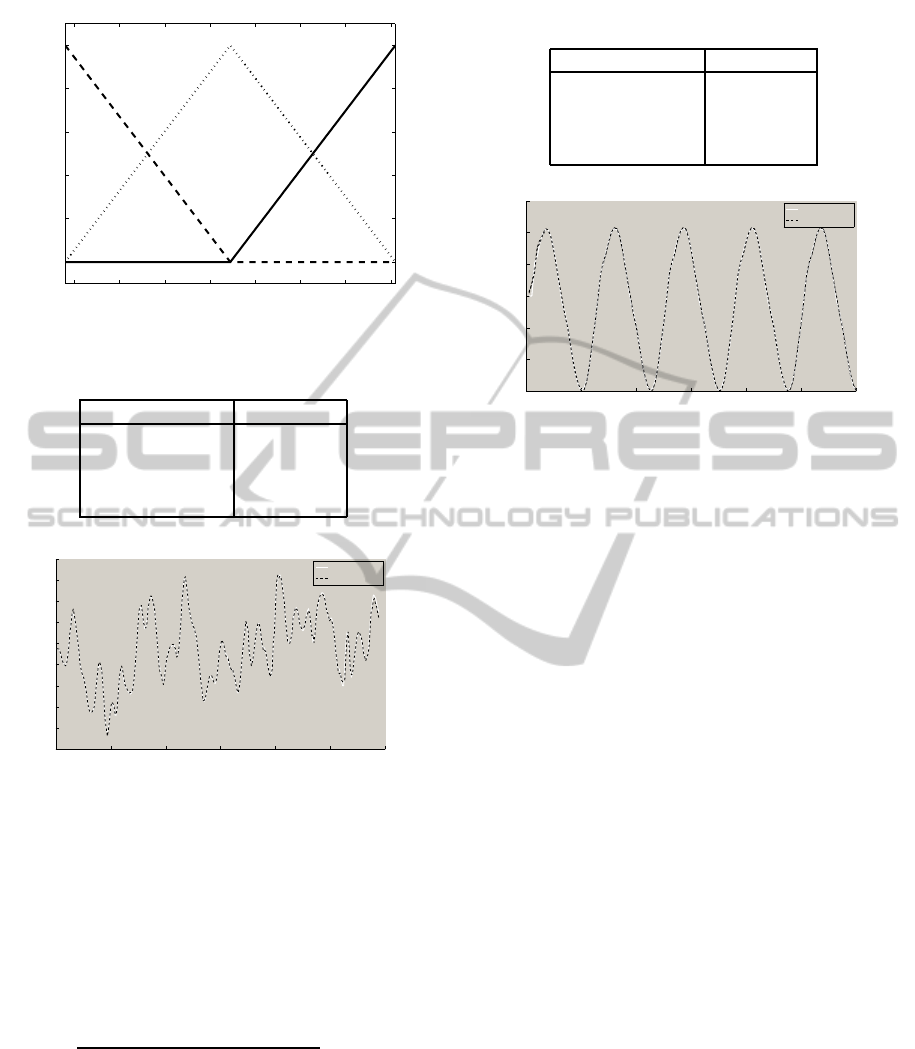
3.1 Identification Problem I
Four different simulations were performed on the Box
and Jenkin’s gas furnace data which is a common
benchmark (Surmann and Maniadakis, 2001). Mem-
bership functions configuration is fixed over the uni-
verse of discourse of each input. For example in Fig-
ure 3 is shown the disposition of membership func-
tions for input u[k− 1] while, the disposition of mem-
bership functions for input y[k− 1] is shown in Fig-
ure 4. The input set is composed by u[k − 1],u[k −
2],y[k− 1] and u[k− 2] for the prediction of y[k]. MSE
values are calculated for the prediction obtained by
the trained of consequents using 294 samples (whole
dataset samples).
−2 −1 0 1 2
0
0.2
0.4
0.6
0.8
1
Input u[k]
Degree of membership
U1 U2 U3
Figure 3: Membership functions for input u[k] with 3 rules.
MSE values for different number of rules in sys-
tem identificacion performance are shown in Table 1.
There is no a significant improvement in the MSE
value for a number of rules higher than 2. The iden-
tification approach presents a good performance fol-
lowing the real output of the gas furnace dataset as
shown in Figure 5.
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
426
46 48 50 52 54 56 58 60
0
0.2
0.4
0.6
0.8
1
Input y[k]
Degree of membership
U1 U2 U3
Figure 4: Membership functions for input y[k] with 3 rules.
Table 1: MSE for Gas Furnace experiment performance.
Number of rules MSE value
2 0.2612
3 0.2505
4 0.2459
5 0.2461
0 50 100 150 200 250 300
44
46
48
50
52
54
56
58
60
62
Number of samples
Output
Plant output
Fuzzy model
Figure 5: Gas furnace identification performance, with 3
rules per input.
3.2 Identification Problem II
The second nonlinear dynamic system to be identi-
fied has been used in (Rong et al., 2006) and (Bot-
tura and de Oliveira Serra, 2004), for testing of their
approaches. The nonlinear modelling problem is de-
fined as
y[k] =
y[k− 1]y[k− 2](y[k − 1] − 0.5)
1+ y
2
[k− 1] + y
2
[k− 2]
+ u[k− 1]
The input set is composed by u[k− 1],y[k− 1] and
y[k− 2]. In the training stage the input u[k] is given by
u[k] = sin(2k/25). The total number of samples gen-
erated is 120. The disposition of each membership
function is equally distributed between input limits,
in a similar manner to the previous experiment. MSE
values for different number of rules in system identi-
fication performance are shown in Table 2.
Table 2: MSE for Gas Furnace experiment performance.
Number of rules MSE value
2 0.1027
3 0.0738
4 0.0663
5 0.0571
0 20 40 60 80 100 120
−3
−2
−1
0
1
2
3
Number of samples
Output
Plant output
Fuzzy model
Figure 6: Nonlinear problem II performance obtained with
3 rules per input.
In this case, a big improvementis obtained when pass-
ing from two number of rules to three. This indicates
that the new added membership function helps to fit
better with the data inputs distribution, allowing a bet-
ter estimation of the real output.
4 CONCLUSIONS
In this paper, a fuzzy inference system is developed
based on the reuse of fuzzified inputs. In this method,
the fuzzy membership functions are fixed for each
input, this allows to even save lots of computation.
The performance of the presented approach has been
tested on two nonlinear systems identification bench-
mark problems. Results indicate that this approach is
easy to implement, has less computation load and is
accurate for a low number of rules per input.
The performance of the approach is sensible to mem-
bership functions location. An optimization of the
location of membership function would improve the
performance and obtain a higher suited model for the
input data.
ACKNOWLEDGEMENTS
This research was supported by Automatic and
Electronic Research Group and the project “Maxi-
mizaci´on de extracci´on de energ´ıa en aerogeneradores
para cogeneraci´on urbana en el Valle de Aburr´a” code
P10-233 from Metropolitan Institute of Technology.
Non-linearSystemIdentificationbyaFuzzyTakagi-SugenoSystemApproachbasedonReusableFuzzifiedInputs
427

REFERENCES
Abdelazim, T. and Malik, O. (2005). Identification of non-
linear systems by takagi-sugeno fuzzy logic grey box
modeling for real-time control. Control Engineering
Practice, 13:1489–1498.
Bottura, C. P. and de Oliveira Serra, G. L. (2004). An al-
gorithm for fuzzy identification of nonlinear discrete-
time systems. In 43rd IEEE Conference on Decision
and Control.
Espinosa, J., Vandewalle, J., and Wertz, V. (2004). Fuzzy
Logic, Identification, And Predictive Control. Ad-
vances in Industrial Control. Springer.
Johansen, T. A., Shorten, R., and Murray-Smith, R. (2000).
On the interpretation and identification of dynamic
takagi-sugeno fuzzy models. IEEE Transactions on
Fuzzy Systems, 8(3):297–313.
Nounou, M. N. and Nounou, H. N. (2005). Multiscale
fuzzy system identification. Journal of Process Con-
trol, 15:763–770.
Rezaee, B. and Zarandi, M. F. (2010). Data-driven fuzzy
modeling for takagi-sugeno-kang fuzzy system. In-
formation Sciences, 180:241–255.
Rong, H.-J., Sundararajan, N., Huang, G.-B., and
Saratchandran, P. (2006). Sequential adaptive fuzzy
inference system (safis) for nonlinear system iden-
tification and prediction. Fuzzy Sets and Systems,
157:1260–1275.
Serra, G. L. O. (2010). Stochastic Control, chapter Fuzzy
identification of Discrete Time Nonlinear Stochastic
Systems, pages 195–216. Sciyo.
Surmann, H. and Maniadakis, M. (2001). Learning feed-
forward and recurrent fuzzy systems: A genetic ap-
proach. Journal of Systems Architecture, 47:649–662.
Takagi, T. and Sugeno, M. (1985). Fuzzy identification of
systems and its aplication to modeling and control.
IEEE Transations on Systems, Man, and Cybernetics,
15(1):116–132.
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
428
