
A New Stopping Criterion for Genetic Algorithms
Christelle Reynes and Robert Sabatier
Laboratoire de Physique Industrielle et Traitement de l’Information, EA 2415, Universit´e Montpellier 1,
15 Avenue Charles Flahault, 34070 Montpellier, France
Keywords:
Genetic Algorithm, Convergence, Stopping Criterion, Markov Chains, Simulation.
Abstract:
Obtaining theoretically legitimate stopping criteria is a difficult task. Being able to use such criteria, especially
in real-encoding context, remains an open problem. The proposed criterion is based on a Markov chain
modelling and on the distribution of the number of occurrences of the locally best solution during several
generations under the assumption of non-convergence. The algorithm stops when the probability of obtaining
the observed number of occurrences is too small. The obtained criterion is able to fit very different solution
spaces and fitness functions (within studied limitations) without any required user intervention.
1 INTRODUCTION
In a theoretical point of view, a Genetic Algorithm
(GA) can be considered to have converged as soon
as the global optimum is found. But in practical is-
sues, convergence can only be detected by a persis-
tence of an optimum for several generations and is
rarely soundly adressed. In the proposedcriterion, the
number of generations without change of the current
local optimum as well as the proportion of the popu-
lation formed by the solution having the best fitness
value will be taken into account.
Many studies arose about the design of a theoret-
ical framework to assess GA convergence. The most
important approach to model GAs is probably the use
of Markov chains (Davis and Principe, 1993).
The scope of the proposed criterion could be
linked to approaches such as takeover time and run-
time modelling. However, the former is based on
what happens without crossover and our objective is
to model the whole behaviour of the GA. The lat-
ter concerns a much more theoretical framework than
what is proposed here. Several studies have been pro-
posed such as (Storch, 2008) but their main goal is to
increase knowledge about algorithms behaviour and
performances and not really practical applications.
Some stopping criteria have been proposed but
most are based on binary encoding with rare exten-
sions to alphabets whose cardinality is restricted to
2
k
like in (Aytug and Koehler, 2000). The criterion
proposed in this paper follows the lead of those re-
searches as it also uses the Markov Chain formalism
to derive its results by studying the expected be-
haviour of GAs.
The proposed criterion acknowledges a less
rigourous theoretical framework but seeks for appli-
cability to as many cases as possible regarding en-
coding strategies, operator use, fitness landscapes,...
Of course, there are limitations which are clearly ex-
plained in the following sections. It is important to
notice that this criterion does not claim to guarantee
that the optimal solution has been found, that is why
it will be called pseudo-convergence criterion. Ob-
viously, for real optimization issues, it is impossible
to ensure reaching the global optimum with heuris-
tic methods but it is of big interest to have criteria to
assess a good quality of the final solution. Here, ev-
erything will be done to calibrate the criterion so that
it detects the convergence as quickly as possible but
finding a good quality solution with more confidence
will be favoured with regards to speed.
2 A NEW CRITERION FOR
PSEUDO-CONVERGENCE
2.1 Overview of the Stopping Criterion
Our starting point is the following observation: a so-
lution with a good fitness (locally or globally optimal)
is likely to gradually overrun the population. This is
due to selection, which favours survival of the best
solutions, and is likely to be strengthened by elitism.
202
Reynes C. and Sabatier R..
A New Stopping Criterion for Genetic Algorithms.
DOI: 10.5220/0004154202020207
In Proceedings of the 4th International Joint Conference on Computational Intelligence (ECTA-2012), pages 202-207
ISBN: 978-989-8565-33-4
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
Our stopping criterion is based on the number of oc-
currences of the locally best solution (denoted LBS,
that is to say the best one found so far) in the last pop-
ulations. One occurrence is defined as one copy of
the solution which currently achieves the best fitness
value. As elitism is to be used, the LBS is obviously
the best solution found so far.
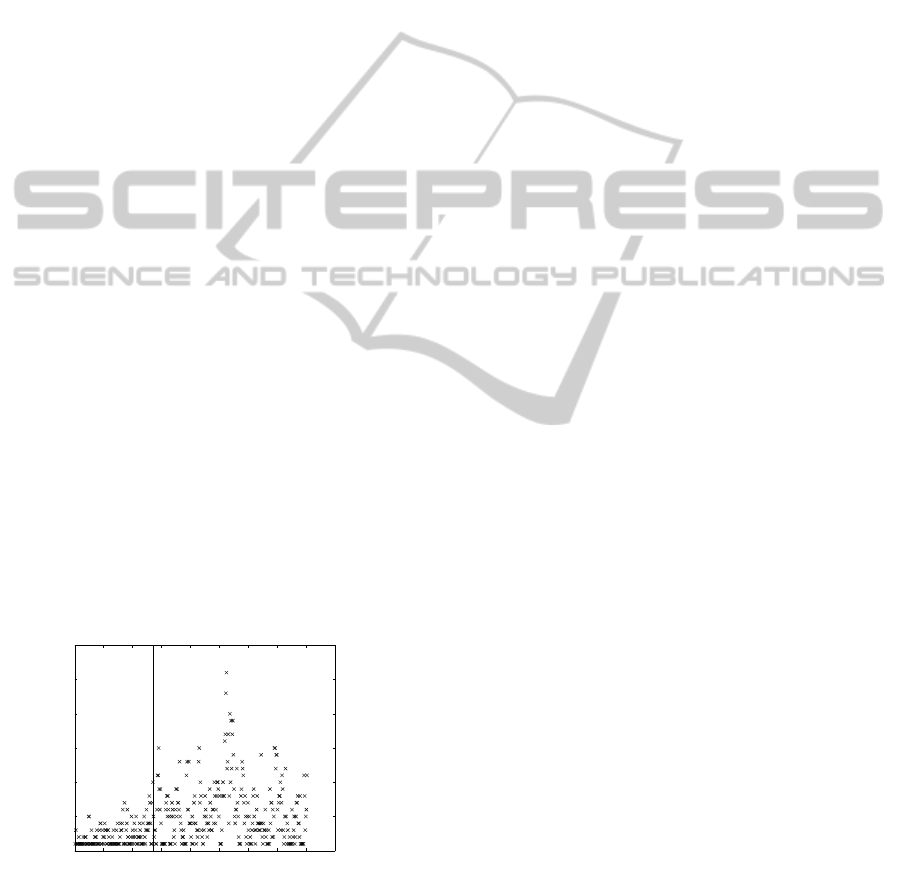
The principle can be illustrated through a small
simulated example (described in section 3.1). Fig.
1 shows the evolution of the number of occurrences
of the LBS for 400 successive generations. After the
line, the number of occurences of the LBS count oc-
currences of the global optimum whereas before the
line, local optima were counted. It can be easily seen
that the number of LBS significantly increases after
this appearance.
However, the algorithm convergence cannot be
questioned by considering only one generation. In-
deed, the stochastic aspect of the algorithm involves
constant fluctuations. Hence, the sum of the results of
several successive generations will be used.
Conceptually, the criterion can be described as fol-
lows. The number of LBS occurences will be mod-
eled for one generation (denoted S
1
) and for the sum
of w successive generations (denoted S
w
, w > 1) un-
der the hypothesis that the global optimum has not
yet been found. After this modelling, it will be possi-
ble to associate a probabilityof obtainingan empirical
value s
obs
, P(S
w
= s
obs
), under this hypothesis. Thus,
as the GA comes to convergence, the probability for
S
w
to take the observed value will become very small
(let say less than p
th
). Then, we will be able to con-
sider that the underlying non convergence hypothesis
is no more true and we will decide to stop the algo-
rithm. Eventually, the criterion will be:
IF P(S
w
= s
obs
) < p
th
THEN stop the algorithm.
0 50 100 150 200 250 300 350 400 450
0
5
10
15
20
25
30
generations
occurences number
Figure 1: Evolution of the number of occurrences of the
LBS for the 400 first generations for simulated data. The
vertical line indicates the first appearance of the globally
best solution in the population.
2.2 Definition of the GA Used
Real encoding will be used. Concerning selection,
the fitness of the new solutions is computed and the
solutions are ranked according to their fitness val-
ues (ties are averaged). Then, the selection prob-
ability for the r-th ranked individual is defined as
P[select r-th ranked individual ] = α × r+ β.
where α and β are defined so that the sum over all the
individuals of the selection probabilities is one and
so that the probability to select the best individual is
twice as high as the median ranked individual. More-
over, elitism is used: the best solution of the current
population is automatically selected for the next gen-
eration.
In order to ease the modelling of the GA, muta-
tion and crossover rates will be applied to individual
solutions, and not on each encoding position.
2.3 Computation of P(S
w
= s
obs
)
2.3.1 Modelling of the Number of LBS
Occurrences for One Generation
Let {Z
n
} denote the process counting the number
of occurrences of the LBS in generation n. Unfor-
tunately, {Z
n
} does not only depend on {Z
n−1
} but
also on the quality of other solutions constituting the
previous population. Hence, in order to make it easier
to use theoretical results, two hypotheses have to be
assumed to consider {Z
n
} as a Markov chain.
Let {T
n
} denote a random variable which takes
value 0 if the LBS has changed between generations
n− 1 and n (denoting that the GA has not converged)
and value 1 if the same LBS has been kept. Then the
first hypothesis required is the following one:
Hypothesis 1:
∀n ∈ N, P(T
n
= 1) = ϕ and P(T
n
= 0) = 1 − ϕ, for
some real constant ϕ ∈ [0, 1].
This hypothesis indicates that the probability of a lo-
cal optimum change cannot be null (the global op-
timum has not been reached) and does NOT evolve
along generations. In practice, this probability obvi-
ously changes. However, the most important is to ob-
tain a modelling which is especially precise just be-
fore convergence. When the process is far from con-
vergence, the model will over estimate the distance
to convergence but the model will fit the process be-
haviour when the situation is decisive. That is why
we will choose a value for ϕ which is close to 1 (see
section 3.2 for more details).
ANewStoppingCriterionforGeneticAlgorithms
203

Hypothesis 2: The probability for new occurrences
of the current LBS to appear from individuals which
are not currently optimum is neglected.
With this hypothesis we consider that only selection
is responsible for increasing the frequency of the lo-
cal optimum. We neglect the possibility for mutation
and crossover to generate new occurrences of the
currently considered LSB. This hypothesis will be
of minor importance when the fitness function takes
many different values and when the solution space is
of high dimension.
Modelling:
Once these two hypotheses are assumed, Z
n
value
only depends on Z
n−1
value and {Z
n
} can be consid-
ered as an order 1 Markov chain. Hence, its behaviour
can be described through its initial state and transition
probabilities, π
n
(k, l) = P[Z
n
= k|Z
n−1
= l] (with
(k, l) ∈ {1, 2, . . . , T
pop
}
2
, where T
pop
is the population
size). Two conditioning steps are required to compute
these probabilities.
First Conditioning
π
n
(k, l) has to be split according to the two possible
values of T
n
. Z
n
compulsory equals 1 if T
n
= 0.
Then, if k = 1, it may be due to a LBS change or the
previous LBS may have been lost during mutation
and crossover and retrieved thanks to elitism.
Second Conditioning
Let Z
mc
n−1
denote the number of instances of the LBS
remaining when mutation and crossover operators
have been applied to generation (n− 1). If Z
n
= l, ac-
cording to the second hypothesis Z
mc
n
∈ {0, 1, . . . , l}.
We obtain P[Z
n
= k|Z
n−1
= l,T
n
= 1] =
∑
l
j=1
P[Z
n
=
k|Z
n−1
= l, T
n
= 1, Z
mc
n−1
= j]P[Z
mc
n−1
= j].
To compute P[Z
mc
n−1
= j], we have to consider
p
m
and p
c
the respective probabilities of mutation
and crossover for one solution. Then the probabil-
ity for one solution to undergo at least one change is
p = p
m
+ p
c
− p
m
× p
c
(as probability and crossover
are independent) and the probability to undergo no
change is q = 1− p. Finally, the distribution of Z
mc
n
is
given by a binomial one with parameters (l, q) :
P[Z
mc
n−1
= j] =
l
j
q
j
(1− q)
l− j
= b
jlq
(1)
Now, elitism has to be taken into account as it adds
one occurrence of the locally best solution. Hence,
only (k− 1) occurrences have to be selected to obtain
k occurrences in the next generation.
To compute the selection probability of the LBS,
when it has j occurrences, we need to use the se-
lection operator definition introduced in section 2.2.
The rank affected to each occurrence of the LBS is
r = T
pop
−
j−1
2
. Hence, the selection probability of
each occurrence of the LBS is p
∗
j
= α
r+β and the se-
lection probability of any of the j occurrences of the
LBS is j × p
∗
j
.
Outcome
Actually, here is the formula for π
n
(k, l) depending on
the value of k:
if k = 1,
π
n
(1, l) = 1− ϕ
"
l
∑
j=1
(1− jp
∗
j
)
T
pop
b
jlq
!
− 1
#
(2)
if 1 < k < T
pop
, π
n
(k, l) =
ϕ
"
l
∑
j=1
T
pop
k− 1
( jp
∗
j
)
k−1
(1− jp
∗
j
)
T
pop
−k+1
b
jlq
#
and if k = T
pop
, π
n
(T
pop
, l) =
ϕ
"
l
∑
j=1
T
pop
( jp
∗
j
)
T
pop
−1
(1− jp
∗
j
) + ( jp
∗
j
)
T
pop
b
jlq
#
.
2.3.2 Modelling of the Number of LBS Instances
along w Generations
Let define:
S
(t)
w
=
w
∑
i=1
Z
t+i
.
Hypothesis 3:
We assume that {S
(t)
w
} is stationary, that is to say, its
characteristics do not depend on time. In this case, it
means that:
P[S
(u)
w
= j] = P[S
(v)
w
= j], ∀(u, v) ∈ N
2
,
It is then possible to simply study S
w
=
∑
w
i=1
Z
i
.
Several simulation results (not shown here)
showed that the stationarity hypothesis is not far from
reality and takes into account that the locally best so-
lution can still change which is completely consistent
with the non convergence.
Now, to determine the distribution of S
w
, we will
firstly focus on the joint distribution of (S
w
, Z
w
)
whose distribution is recursively assessed by
∀w, P[S
w+1
= s, Z
w+1
= k] =
T
pop
∑
l=1
π
w+1
(k, l)P[S
w
= s− k, Z
w
= l]. (3)
To obtain S
w
distribution, it is necessary to sum over
all the states of Z
w
.
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
204

2.3.3 Final Criterion
Actually, let us sum up the computation of
P(S
w
= s
obs
):
P[S
w
= s] =
T
pop
∑
k=1
P[S
w
= s, Z
w
= k],
with
∀w, P[S
w+1
= s, Z
w+1
= k] =
T
pop
∑
l=1
π
w+1
(k, l)P[S
w
= s− k, Z
w
= l]. (4)
3 CRITERION STUDY
3.1 Threshold Determination
This illustration is a clustering problem. The goal is
to conceive a GA that performs unsupervised learn-
ing with an unknown number of groups. Only a max-
imum allowed number of groups, K
max
, has to be a
priori given. The approach chosen here is to optimize
the assignment of the observations to groups, making
the issue a combinatorial problem.
During initialization, for each potential solution in
the population, a number of groups, k, is uniformly
randomly chosen in {2, . . . , K
max
}. Then, an integer
in {1, . . . , k} is uniformly randomly chosen for each
of the n observations. Concerning mutation, three
possibilities are allowed: withdrawing or adding a
group and changing one or more assignment(s). The
crossover is a uniform one. Finally, the fitness func-
tion depends on the number of groups, k, and on the
sum of within-group variances, in order to take into
account both parsimony and precision of the model.
The dataset is a simulated one, so that the global
optimal solution is known. The data contain 80 ob-
servations divided into four groups and described by
five features. The first two features give the location
of the observations in a plan whereas the other three
ones are only uniform noise. For each group, the val-
ues of the first two variablesare generated by a normal
distribution whose average gives the centroid location
and whose variance indicates the range.
To perform a first, coarse estimation of the satisfy-
ing p
th
, the described GA has been applied six times
on this dataset and we observed the evolution of S
20
.
For these runs, the global optimum has been found by
the GA after respectively 109, 77, 71, 98, 70 and 73
generations. If we choose p
th
= 10
−3
, the global op-
timum is missed in three out of six runs (results not
shown). For p
th
= 10
−4
, one more run is success-
ful. From p
th
= 10
−5
, the global optimum is always
found.
In order to test p
th
= 10
−5
, the GA was run one
hundred times leading to 91% of optimum discovery
(with only one misclassification in the remaining 8%
and two in the last 1%). It would be possible to choose
a smaller threshold. However, the efficiency improve-
ment would be small whereas the computation time
before stopping would be much lengthened. That is
why we chose p
th
= 10
−5
.
By applying the formula obtained in section 2.3
with the chosen parameters, Tab. 1 gives some mini-
mum values of s
obs
required to stop the algorithm for
usual values of p
m
, p
c
and T
pop
.
3.2 Parameters Influence
The criterion definition implies that it depends on GA
parameters but also on its window size w, P[T
n
= 0]
and the threshold previously studied. The continua-
tion of that section will deal with the study of the first
two parameters influence. Thiscan be doneregardless
of the optimization problem which does not interfere
in the distribution computation.
P[T
n
= 0] has to be constant due to the 1
st
hypoth-
esis. We have determined P[T
n
= 1] < 1. Moreover
along generations, P[T
n
= 0] will rapidly become very
weak. Thus, small values are going to be studied.
The results can be found in Fig. 2. The plotted
value roughly shows the proportion that must be filled
up by the LBS before deciding to stop the GA. As
expected, the less the probability to find a better so-
lution, the less this proportion. So that the criterion
is more stringent, small values of P[T
n
= 0] will be
favoured. From now on, we choose P[T
n
= 0] = 0.01.
Concerning the window size, Fig. 2 shows values
between 3 and 50. For small w the filled up proportion
has to be more important and rapidly decreases when
w value increases. From twenty generations, the de-
crease slows down that is why we chose a value of
w = 20 for further applications.
3.3 Limitations
The 1
st
hypothesis in section 2.3.1 has been studied in
previous paragraphs. Even if it is a strong hypothesis,
taking a small value for P[T
n
= 0] allows to minimize
the consequences with regards to convergence. The
objectiveof this section is to highlightcases for which
the second hypothesis cannot be assumed.
Firstly, if the considered issue deals with a solu-
tion space whose dimension is small, the probability
to obtain several times the same solution cannot be
ANewStoppingCriterionforGeneticAlgorithms
205

Table 1: Minimum values of s
obs
required to stop the algorithm for p
th
= 10
−5
, w = 20, p
m
∈ {0.5, 0.6, 0.7}, p
c
∈
{0.5, 0.6, 0.7} and T
pop
∈ {50, 100, 200,500}.
p
c
0.5 0.6 0.7
50 100 200 500 50 100 200 500 50 100 200 500
0.5 126 130 132 134 97 99 100 101 76 77 78 78
p
m
0.6 97 99 100 101 80 81 82 82 66 67 67 67
0.7 76 77 78 78 66 67 67 67 57 57 58 58
0 5 10 15 20 25 30 35 40 45 50
0.04
0.06
0.08
0.1
0.12
0.14
0.16
0.18
0.2
Window size
Stopping proportion
Figure 2: Evolution of the stopping criterion with the win-
dow size and P[T
n
= 0]. The solid line curve represents
P[T
n
= 0] = 0.5, the dashed one to P[T
n
= 0] = 0.25, the dot-
ted one to P[T
n
= 0] = 0.1, the bold one to P[T
n
= 0] = 0.05
and the dot-dashed one to P[T
n
= 0] = 0.01.
neglected. However, the optimization in such spaces
is quite easy and does not require the use of a GA.
Yet, the same phenomenon would occur for many so-
lutions having the same fitness value. For instance,
this can happen if the fitness function is a misclassifi-
cation with few individuals to be classified. In such a
case, if the solutions are really equivalent in the appli-
cation context, the problem is likely to be solved by
a simpler optimization method, else the fitness has to
be reformulated to take into account this variety.
On the other hand, when initialization is not com-
pletely random but focused around chosen points our
criterion should not be used.
4 APPLICATIONS
The first application will allow a detailed study of pa-
rameters influence including function complexity and
GA parameters. Finally, some usual test problems for
optimization will be used to show the results of the
criterion for various and difficult functions.
4.1 Rastrigin’s Function
The generalized Rastrigin function (M¨uhlenbein
et al., 1991) is a usual non linear multimodal func-
tion used to test optimization methods. This function
presents many close local minima and only one global
minimum. The shape of the function is determined by
the external variables A and L, which control the am-
plitude and frequency modulations respectively. The
global minimum is 0.
Concerning Rastrigin’s parameters, for A, integer
values between 2 (the amplitude in the data is then
about 55) and 15 (the amplitude is about 100) will be
considered. The effect of L is really important, for
L = 1, the solution space contains 25 local minima
and for L = 5, we find 729 minima. Thus, integer val-
ues between 1 and 5 will be considered.
For the first simulation, we studied the influence
of A and L for p
m
= 0.6, p
c
= 0.5, T
pop
= 100 and
d = 2. For each combination between A and L, fifty
runs of the GA have been performed.
For all the runs, the final solution was into the
deepest hole of the function even if the average num-
ber of generations required to see the global optimum
for the first time increases with both values of A and
L.
Then, the GA parameters, T
pop
∈ {50, 100, 200},
p
c
and p
m
in{0.5, 0.6, 0.7} are studied for A ∈ {2, 25}
and L ∈ {2, 5}. For each combination, 450 runs have
been performed. Excepted the case A = 15 and L = 5,
the error rate is very low (0% in 59% of combinations,
less than 1% of errors in the remaining combinations)
and seems to be independent on the GA parameters.
In complex issues, the stopping criterion is slightly
less efficient (but it only fails in maximum one out
of ten trials) and requires appropriate GA parame-
ters. Hence, our stopping criterion is really helpfulbut
does not make it any the less necessary to look for ap-
propriate parameters for the most complex problems.
The last studied parameter is the Rastrigin dimen-
sion d. Eight values have been chosen between 3 and
10. For the easiest combinations, the stopping crite-
rion performs very well (at most, the deepest hole was
missed twice). For 5 ≤ d ≤ 9 the optimum is missed
in at most 20% of runs but for d = 10, 17 out of 50
runs were not successful. These cases correspond to
really complex situations and it is not really surpris-
ing to miss the real optimum for certain trials. Here, it
can be interesting to notice that, in a general point of
IJCCI2012-InternationalJointConferenceonComputationalIntelligence
206

Table 2: Convergence results. In the first three columns,
range, average and standard error (between brackets) val-
ues of the objective functions are given. The last column
indicates the theoretical optimum value.
function y
min
y
max
¯y y
opt
Osborne 6e-5 5e-3 2.54e-4 5.46e-5
(5e-4)
Bard 8.2e-3 8.2e-3 8.2e-3 0.008215
(4e-7)
Biggs 1.2e-6 5.5e-3 5.26e-4 0
(1e-3)
Gulf 8.4e-32 8.2e-5 2.2e-6 0
(6e-6)
view, it is always reasonable to perform a GA several
times to evaluate the solution robustness.
4.2 Application to Standard Test
Problems
A subset of test functions in (Mor´e et al., 1981) con-
sisting in sum of squares of n
f
functions of n
v
vari-
ables is used: namely Osborne I, Bard, Biggs EXP6
and Gulf Research and Development. Results are in-
troduced in Tab. 2.
In all cases, solutions obtaining very good values
of the objective functions have been found during the
different runs and the worst objective function value
obtained is always close compared to the real range of
it. Hence, running the GA a few times (which can be
considered as compulsory when dealing with stochas-
tic optimizers) using the proposed stopping criterion
is likely to bring much information about the true so-
lution. When no information is known about the
objective function behaviour, it could be really diffi-
cult to decide to stop after any given number of gen-
erations. Indeed, considering these functions, the cri-
terion required between a few hundreds and several
tens of thousands of generations to stop.
5 CONCLUSIONS
Thanks to the modelling of the process describing the
number of occurrences of the LBS during several suc-
cessive generations, a new stopping criterion has been
proposed for real-encoded GAs. The originality of
our criterion is on one side the focus made on the LBS
occurences and on the other side, the generality of
its use: operators are completely free as long as they
respect the definition of the mutation and crossover
rates and especially the criterion has been developed
to apply on real-encoded GAs. It has the main advan-
tage of taking into account all the GA operators with-
out requiring user intervention when changing prob-
lem. The modelling required three hypotheses imply-
ing some cases where this stopping criterion should
not be applied.
Despite the required simplifications, the theoret-
ical developments performed in this paper allow to
provide a useful understanding of GA unfolding even
if they do not restore the whole complexity of reality.
This distance between the model and the real situation
leads us to consider a very small probability (10
−5
)
for the algorithm stopping. In our opinion, this dis-
tance is mainly due to the second hypothesis.
Concerning the first hypothesis, the most stringent
case has been chosen. Then, we probably would be
able to stop earlier without missing the global opti-
mum. However, the main goal of this criterion is not
to achieve speed performances. It is more specifically
designed to enable the user to obtain a good solution
without intervention in the GA stopping process.
Actually, even if the model does not perfectly fits,
the simulations performed in this paper proved the
stopping criterion efficiency. Our stopping rule ap-
peared to be equally efficient for completely differ-
ent and very complex functions. Robustness was also
shown concerning changes in the GA parameters.
Actually, the proposed stopping criterion should
be used instead of arbitrary criteria, for problems
within limitations of section 3.3. It does obviously
not guarantee to find the global optimum, hence the
GA has to be run several times.
REFERENCES
Aytug, H. and Koehler, G. (2000). New stopping criterion
for genetic algorithms. European Journal of Opera-
tional Research, 126(3):662–674.
Davis, T. and Principe, J. (1993). A markov chain frame-
work for the simple genetic algorithm. Evolutionary
computation, 1(3):269–288.
Mor´e, J., Garbow, B., and Hillstrom, K. (1981). Testing un-
constrained optimization software. ACM Transactions
on Mathematical Software (TOMS), 7(1):17–41.
M¨uhlenbein, H., Schomisch, M., and Born, J. (1991). The
parallel genetic algorithm as function optimizer. Par-
allel computing, 17(6-7):619–632.
Storch, T. (2008). On the choice of the parent population
size*. Evolutionary Computation, 16(4):557–578.
ANewStoppingCriterionforGeneticAlgorithms
207
