
Planning, Designing and Evaluating Multiple eGovernment
Interventions
∗
Fabrizio d’Amore
1
, Luigi Laura
1
, Luca Luciani
2
and Fabio Pagliarini
2
1
Dept. of Computer, Control and Mangement Engineering, Sapienza Univ. of Rome, Via Ariosto 25, 00185 Rome, Italy
2
INVITALIA Agenzia Nazionale per l’Attrazione degli Investimenti e lo Sviluppo d’Impresa S.p.A,
Via Boccanelli 30, Rome, Italy
Keywords:
eGovernment, Interventions Planning.
Abstract:
We consider the scenario where an organ of a public administration, which we refer as the decisionmaker,
is requested to plan one or more interventions in some framework related to the Information Society or the
eGovernment set of actions. We propose a methodology to support the decisionmaker in orienting, planning,
and evaluating multiple (partially overlapping) interventions. In particular, we address two main problems:
first, how to decide the structure of the interventions and how to determine the relevant parameters involved;
second, how to set up a scoring system for comparing single interventions and its extension to the case of
multiple interventions. The methodology unexpectedly shows that it is not always the case that the best
outcome is the one obtained by the best projects. We formally model the problem and discuss its computational
complexity. Our approach is also effective in process of selecting, from a set of submitted proposals, the ones
to be funded.
1 INTRODUCTION
We consider a scenario aimed at planning and/or de-
signing interventions, namely the definition of the-
matic areas, categories of users and beneficiaries, ge-
ographic locations and specific goals constituting a
framework in which a decisionmaker wants to fund
new projects, during the process of setting up an ex-
plicit call. The decisionmaker is typically a specific
organ of the (central or local) public administration.
Such decisionmaker, in charge of assigning a give
amount of money, has to select the type of interven-
tion by mean of an articulated and complex decision
process, which includes kind of users to benefit, type
of services and level of their interactivity, state/level
of existing and expected services, geographical and
socio-economical context, etc. It is clear that such a
decision process cannot be fully automated, but it can
get benefits from the definition of guidelines and from
the availability of supporting tools that make faster
the so called “what-if” analysis.
Although the interventionswe consider pertain the
eGovernment, the Information Society and the ICT
areas, the results we present may apply to several oth-
∗
This work has been partially supported by the Italian
National Project POSI PON ATAS.
er areas.
In principle, the problem of making a decision can
be modeled as a problem of optimization, defined by
an objective function to be minimized (or maximized)
under a set of constraints to be respected. The prob-
lem can be solved through mathematical techniques,
which can be rather complex, depending on the type
of objective function and constrains. In the case of
multi-objectivefunction the so-called Pareto optimum
(Fudenberg and Tirole, 2002) should be searched.
The number of variables and the complex constrains
to be modeled might turn the resulting optimization
problem intractable, that means no useful solution can
be found in real cases (Garey and Johnson, 1979).
Because of such issues we here propose a novel
approach, whose underlying model will be presented
in the next sections. We also address the problem
of evaluating interventions, by first defining the prob-
lem of evaluating a single intervention (Sect. 4), then
showing how to extend it to the case of multiple inter-
ventions (Sect. 5). We formally define this problem
and we prove that it belongs to the NPO complexity
class
2
, and therefore, if we want to efficiently solve it,
we must use some heuristics.
2
See the book of Papadimitriou (Papadimitriou, 1994)
for a classical reference on computational complexity.
85
d’Amore F., Laura L., Luciani L. and Pagliarini F..
Planning, Designing and Evaluating Multiple eGovernment Interventions.
DOI: 10.5220/0004071300850092
In Proceedings of the International Conference on Data Communication Networking, e-Business and Optical Communication Systems (ICE-B-2012),
pages 85-92
ISBN: 978-989-8565-23-5
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
Table 1: Summary of the notation used in this paper.
notation meaning
B available budget for all the interventions
q number of interventions
B
i
budget for intervention i
p
i
number of projects to be funded in the intervention i
B
i, j
funding for project j of intervention i
r
i
B
i,1
/B
i,p
i
ratio between min and max funding in intervention i
R B
1
/B
q
ratio between the budgets of the interventions with min and
max budget
2 INTERVENTIONS AND
BUDGET
An intervention can be characterized by: the avail-
able budget, to be granted to co-funded projects; con-
straints on the employment of the budget, deriving
from laws and rules; types of objectives of fundable
projects; category of beneficiaries and their socio-
economical/territorial positions; type and impact of
the expected results.
The available budget is often an amount not sub-
jected to decision. This happens when an external
organization (e.g., the European Committee) makes
available to the decisionmaker an amount for co-
funding projects satisfying some specific require-
ments. The budget defines natural constraints on the
amounts to be assigned to the projects
3
and so it al-
lows to approximately dimension the interventions.
If resources are fairly distributes, it is easy to esti-
mate the number of projects to be funded, by defining
the ratio between maximum and minimum funding.
Denoting the available budget by B, the number of
projects to be funded by p, the fund to be assigned to
the i-th project by B
i
and the ratio between the mini-
mum and the maximum funding by
r =
min
i
{B
i
}
max
i
{B
i
}
being 0 < r ≤ 1, it is possible to exploit mathematical
interpolation to dimension the amounts of the fund-
ings. In the case of linear interpolation we have
B =
p
∑
i=1
B
i
=
(max
i
{B
i
} + min
i
{B
i
})p
2
from which we get
max
i
{B
i
} =
2B
p(1+ r)
3
In the case of co-funding, the amount assigned to each
project is at least the 30–35% of the budget of the whole
project and therefore it determines its size.
If we re-number the projects accordingly to increasing
fundings we get
B
j
= B
1
+
B
p
− B
1
p− 1
( j − 1)
for j = 1, 2,..., p, with
B
1
=
2rB
p(1+ r)
Even if we have obtained these amounts by means
of a simple and arbitrary linear interpolation, they
are suitable to be the starting scheme of the decision-
maker. Subsequent refinements will not cause, most
likely, substantial changes of the amounts.
In some cases, the decisionmaker can program in-
terventions by means of more than one call. Our ap-
proach still allows to determine the (base) amounts to
be assigned to the projects. We introduce in a more
compact form the used notation, assuming without
loss of generality that both interventions and projects
are numbered by increasing fundings. The linear in-
terpolation immediately gives
B
i,p
i
=
2B
i
p
i
(1+ r
i
)
Such formula requires to know B
i
, which can be de-
termined by an analogous procedure.
B
q
=
2B
q(1+ R)
, B
1
=
2RB
q(1+ R)
The searched value is
B
i
= B
1
+
B
q
− B
1
q− 1
(i− 1)
The decisionmaker can therefore fix a few important
parameters, such as B, q, R and the r
i
’s, and use them
to compute the p
i
’s and B
i, j
’s. The whole process
could require some iterations, but allows to quickly
estimate the rough value of a few important quanti-
ties. This can be efficiently done exploiting a simple
spreadsheet.
ICE-B2012-InternationalConferenceone-Business
86

We conclude remarking the importance of recog-
nizing the relationships existing among different in-
terventions. In practice, if each intervention was in-
dependently planned, there would be no difference
between to plan q interventions and to plan q times
an intervention. What will make the quantum leap
is identifying the dependencies existing among dif-
ferent types of interventions, setting up a hierarchical
system that will allow to start well-coordinated and
highly correlated tasks, according to a bottom-up ap-
proach aiming at privileging the construction of basic
common infrastructures.
3 IMPACT ANALYSIS
We here introduce a methodology for carrying out
the analysis of the impact of a planned intervention.
It is based on the concept of indicator. Indicators
have been introduced in statistics and are currently
used in a variety of areas, among which the manage-
ment control (Smith, 2009); here we use indicators
for carrying out the analysis of the impact of interven-
tions. An indicator is a mathematical function defined
over a finite or infinite domain commonly defined as
D = D
1
× D
2
× ··· × D
n
, where each D
i
is a finite set
of numbers (real, integer or natural) and n ∈ N de-
scribes the quantity of homogeneous data which we
want to get concise information from. In the man-
agement control, statistical indicators are used to get
concise information about some specific aspect of re-
ality; depending on the type of analysis we are carry-
ing on — pre-analysis, post-analysis, feasibility anal-
ysis, benchmarking etc. — many different categories
of indicators can be used. In the recent literature there
are several proposals providing sets of indicators, or-
ganized by category, level of aggregation, homogene-
ity, correlation etc. (see, e.g., (European Commission,
2010; eGEP, 2012; Ojo et al., 2005; Understand, 2006
)).
From what we discussed before, it is clear that the
Indicators Set (IS) plays a critical role in the whole
process of planning, designing, and evaluating inter-
ventions; the following points are therefore crucial:
1. The definition of a correct and complete Indica-
tors Set able to model the scenario.
2. The indicators in the IS must be easily measured
and constantly monitored before, during, and af-
ter the intervention. Information sources must be
reliable for the whole duration of the process.
3. In order to improve the reliability, the IS should be
chosen to be partially redundant, i.e. there should
be some correlation between different indicators
and, if possible, information sources should be
chosen to obtain independently values of corre-
lated indicators.
With distinct information sources providing the
values of the indicators, it is possible on one side to
havea precise picture of the real evolutionof the inter-
vention/project, on the other a variation in the correla-
tion between related indicators might point out some
errors in the measure or in the update of an indicator
and, in the long run, can help in the assessment of the
information sources themselves.
Given an indicators set I = {i
1
,i
2
,..., i
n
}, we
define an aggregation (of the indicators) A =
{A
1
,A
2
,..., A
k
}, where A
i
⊆ I for any i and A
i
∩ A
j
=
/
0 for i 6= j; in other words, an aggregation is a par-
tition of I, conceptually based on a high level of ho-
mogeneity. From the decisionmaker point of view,
both indicators and aggregations belong to concep-
tual categories whose level is not sufficiently high.
The decisionmaker prefers to reason about concrete
objectives, directly related to benefits for citizens, en-
terprises, concerns, public administration etc. When
defining a main topic for an intervention (e.g., the area
of ICT) it is easy to define a set of (concrete) possi-
bly interesting objectives O = {o
1
,o
2
,..., o
m
}. Once
O has been defined, we expect it very slowly changes
as time passes, so that we can assume without loss of
generality O is fixed. For each item o
i
∈ O it is possi-
ble to identify its correlations to some indicators in I
or, more simply, to elements in A.
In this way, when interested in an objective o
i
, the
decisionmaker can be easily informed about the in-
volved indicators, related to o
i
. It will be sufficient
to make explicit all the correlations and store them
into some suitable supporting system. Notice that we
can consistently extend our assumption of static sets,
what leads us to static correlations. Identifying ele-
ments of sets and their correlations can be done once;
later, only limited maintenance will be required.
The decisionmaker is also interested in con-
textualizing information (according territory, socio-
economics, politics etc.). We assume for simplicity
one semantic coordinate of contextualization. Hence,
we introduce a set of contexts R = {r
1
,r
2
,..., r
ℓ
}
(e.g., the main politic units, or regions, of a given
country). It is possible to introduce more sets of
contexts, all of them to be considered as orthogonal.
On the base of the context analysis, and of laws and
rules, high priority objectives can defined, immedi-
ately identifying the involved indicators.
In order to describe all this knowledge we exploit
the mathematical concept of graph; for basic defini-
tions on graphs (simple graph, tree, forest, walk etc.)
see for instance (Diestel, 2006). In particular we are
Planning,DesigningandEvaluatingMultipleeGovernmentInterventions
87
(a)
(b)
Figure 1: (a) A possible 4-parted graph, showing sets O, I, A and R. (b) Example of tree of monotonous walks.
interested in the notion of multipartite graph, defined
as a simple graph G = (V, E) where
• V is partitioned into k subsets V
i
⊆ V, with
S
i
V
i
=
V and V
i
∩V
j
=
/
0 for i 6= j;
• there is no edge {u,v} if u and v belong to the
same subset of vertices.
In this case the graph is said to be k-parted.
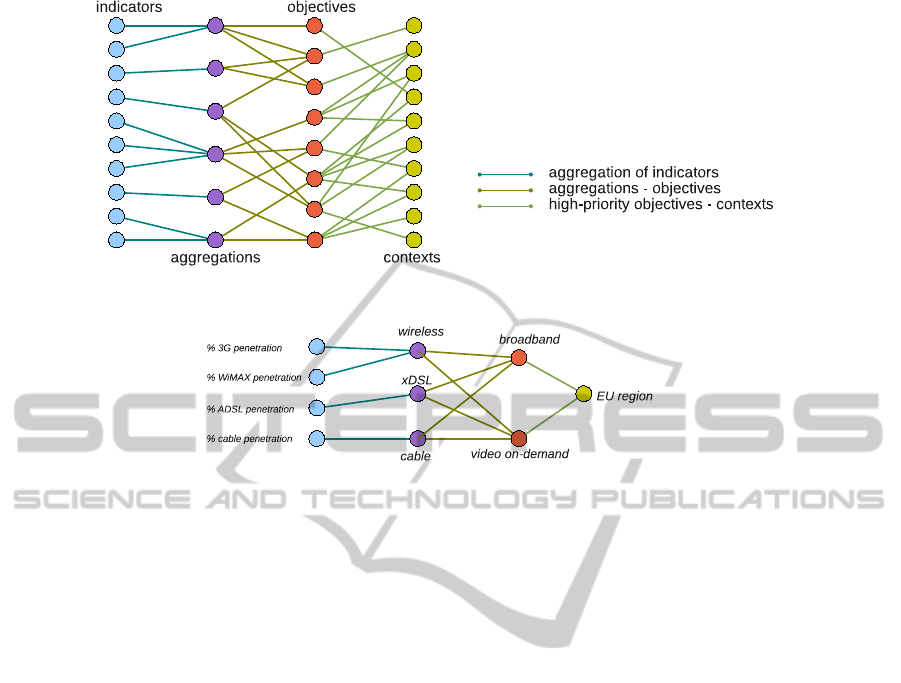
We can use a 4-parted graph to represent sets I, A,
O and R, and to model the correlations existing among
their elements. We define a 4-parted graph whose set
of vertices is defined as I ∪ A ∪ O ∪ R and it is par-
titioned into I, A, O and R, and whose edges are of
three types:
• Edges incident to vertices of A and I. They model
the structure of the aggregation of indicators.
• Edges incident to vertices of O and R. They
model the correlations between contexts and high-
priority objectives.
• Edges incident to vertices of A and O. They model
the correlations between high-priority objectives
and aggregations of indicators.
An example is given in Fig. 1 (a). Given such a graph,
by selecting any vertex all related information can be
automatically selected: it suffices to find the appropri-
ate set of walks.
Given a multipartire graph, we define a
monotonous walk as a walk having exactly one
vertex in every subsets of vertices. In the 4-parted
graph each monotonous walk is constituted by an
indicator, an aggregation of indicators, a context and
an objective. When the decisionmaker selects objec-
tive o
i
, the set of all monotonous walks containing
o
i
is immediately identified. It is easy to see that
such a set of walks define a tree, which we call “tree
of monotonous walks rooted at o
i
.” An example is
shown in Fig. 1 (b).
Our approach allows to capture the correlations
among the important concepts. Notice that the model
could be strengthened by quantifying the correlations,
so introducing a measure that can depend not only on
the two related concepts, but also on additional infor-
mation (contextualization, other strongly related indi-
cators etc.). A hypergraph (Berge, 1970), that gener-
alizes the concept of graph, seems to be a candidate
for such a quantitative model, however most of natu-
ral problems on hypergraphs are intractable. A sim-
pler way is to use weighted graphs, by introducing a
weighting function associating positive real numbers
(weights) to edges.
4 ASSIGNING SCORES TO
INTERVENTIONS
Our first need is to define a Scoring System that, at a
first glance, can be seen as a block box whose input
are: the target of the intervention (e.g. school, public
administration, concern etc.), the location of the in-
ICE-B2012-InternationalConferenceone-Business
88

tervention, the state of the indicators pre and post the
intervention, and the state of the average (national or
international) of the values of the indicators. The out-
put of the system is a score, representing the goodness
of the intervention/project.
We now briefly describe some natural require-
ments that any Scoring System should satisfy; later
we propose a functional scheme that meets all the re-
quirements.
The input of the Scoring System, as described
above, can be formally detailed in the following way:
• The intervention target t ∈ T = { set of all the pos-
sible intervention targets }.
• The Indicator Domain D = D
1
× D
2
× · · · × D
n
,
where each D
j
is a subset of R, the set of real
numbers. Without loss of generality we can nor-
malize all the domains to the interval [0,1] ⊂ R.
• The state pre intervention is a vector i
A
=
(i
1
,i
2
,...i
n
), where i
1
∈ D
1
, i
2
∈ D
2
, .. . ,i
n
∈ D
n
.
• The state post intervention is a vector i
P
=
(i
1
,i
2
,...i
n
), where i
1
∈ D
1
, i
2
∈ D
2
, .. . ,i
n
∈ D
n
.
• The (national or international) average is a vec-
tor i
M
= (i
1
,i
2
,...i
n
), where i
1
∈ D
1
, i
2
∈
D
2
, .. . ,i
n
∈ D
n
.
• The locality of the intervention is completely de-
scribed by the vector i
A
(state of the indicators be-
fore the intervention).
The output of the System is a score that, without
loss of generality, we can assume between 0 and 1;
therefore a Scoring System can be seen as a function
f : T × [0,1]
3
→ [0, 1]. Some natural requirements for
a scoring system are:
• If i
P
= i
A
, then f(t,i
A
,i
P
,i
M
) = 0 (zero score): if
a project does not improve any of the indicators
then its score is 0.
• If i
P
= (1,1. . . , 1), then f(t,I
A
,i
P
,i
M
) = 1 (max-
imum score): if an intervention/project raises all
the indicator the the maximum then its score is
maximum.
• Given two projects P1 and P2, with
i
P1
= (i
1
,i
2
,...i
j
+ ∆i
j
...i
n
) and i
P2
=
(i
1
,i
2
,...i
j
...i
n
), then f(t,i
A
,i
P1
,i
M
) ≥
f(t,i
A
,i
P2
,i
M
) (non decreasing property): if
two different projects bring all the indicators to
the same values, except one, the project better
performing on that indicator should score better
(or equal
4
).
4
The score can be equal when, given a set of weights
representing the relative importance of the indicators, the
corresponding weight is 0.
4.1 A Proposed Scoring Function
In this section we present a scoring system that satis-
fies the requirements described previously. In order to
do so, we first need to define a way to model the inter-
vention target, and we decide to represent it as a vec-
tor of n weights t = (w
1
,w
2
,..., w
n
), where w
j
∈ [0,1]
for j = 1,2,...,n. Here n is the number of indicators
and each weight w
j
represents the relative importance
of the indicator for the given target. The vector of
weights can be derived from the tree of monotonous
walks previously introduced, by identifying the ob-
jective (element of set O) which the target is aiming
at. In the case of more than objectives, the associated
forest of monotonous walks will be considered.
That being stated, the scoring system can be rep-
resented by the following function:
f(t,i
A
,i
P
,i
M
) =
t · (i
P
− i
A
)
t · (1
n
− i
A
)
(1)
where we have denoted by
1
n
the vector whose n
components are all equal to 1, by “·” the vector
product and by “−” the vector difference. We re-
call that, given two vectors v = (v
1
,v
2
,..., v
n
) e w =
(w
1
,w
2
,..., w
n
) it holds that
v· w = v
1
· w
1
+ v
2
· w
2
+ ··· + v
n
· w
n
and
v− w = (v
1
− w
1
,v
2
− w
2
,..., v
n
− w
n
)
We prove now that this function satisfies all the re-
quirements:
• If i
P
= i
A
, then f(t,i
A
,i
P
,i
M
) = 0 (zero score):
f(t,i
A
,i
P
,i
M
) =
t · (i
A
− i
A
)
t · (1
n
− i
A
)
=
t · 0
n
t · (1
n
− i
A
)
= 0
where we have denoted by
0
n
the vector whose n
components are all equal to 0.
• If i
P
= (1,1...,1), then f(t,I
A
,i
P
,i
M
) = 1 (maxi-
mum score):
f(t,i
A
,i
P
,i
M
) =
t · (
1
n
− i
A
)
t · (1
n
− i
A
)
= 1
• Given two projects P1 and P2, with
i
P1
= (i
1
,i
2
,...i
j
+ ∆i
j
...i
n
) and i
P2
=
(i
1
,i
2
,...i
j
...i
n
), then f(t, i
A
,i
P1
,i
M
) ≥
f(t,i
A
,i
P2
,i
M
) (non decreasing property):
f(t,i
A
,i
P1
,i
M
) − f (t,i
A
,i
P2
,i
M
) =
=
t · (i
P1
− i
A
)
t · (1
n
− i
A
)
−
t · (i
P2
− i
A
)
t · (1
n
− i
A
)
=
=
t · (i
P1
− i
A
) −t · (i
P2
− i
A
)
t · (1
n
− i
A
)
=
Planning,DesigningandEvaluatingMultipleeGovernmentInterventions
89

=
t · (i
P1
− i
A
− i
P2
+ i
A
)
t · (1
n
− i
A
)
=
t · (i
P1
− i
P2
)
t · (1
n
− i
A
)
=
t · ((i
1
,i
2
,. .., i
j
+ ∆i
j
,. .., i
n
) − (i
1
,i
2
,. .., i
j
,. .., i
n
))
t · (1
n
− i
A
)
=
=
t · (0,0, ... , ∆i
j
,. .., 0)
t · (1
n
− i
A
)
≥ 0
We notice that this function does not keep into ac-
count the national (or international) average of the in-
dicators; the above definitions can be easily adapted
to include it.
5 EVALUATION OF MULTIPLE
AND OVERLAPPING
PROJECTS
So far we have considered the scoring of a single in-
tervention/project. We nowconsider the case in which
there are several distinct intervention/projects, poten-
tially overlapping. It is important to mention that,
when planning multiple projects, the value of the in-
dicators after the projects must be carefully analysed.
Let us provide an example: assume that, in a given
area, the broadband penetration is 30%; we have two
distinct projects, using distinct technologies, that have
been estimated to raise that value by, respectively,
35% and 45%. It is clear that, when estimating the
overall improvement of both projects, we cannot sim-
ply add the values, since this would lead to an un-
feasible value of 110%; neither we can estimate it to
100%, because it is reasonable that there should be
some overlapping in the population reached by both
projects, and therefore the real value might be some-
thing slightly bigger than 75%.
Therefore it is important to analyze the effect of
the multiple projects together,rather than simply sum-
ming up all the (estimated) effects. We now pro-
vide an example of a somewhat of a paradoxical ef-
fect: given a ranking of projects, it might happen that,
when we want to fund some of them, the best outcome
is when we choose the worst (in the ranking) projects.
Let us assume that we have 4 projects and 3 in-
dicators; for the sake of simplicity we assume that
(i) all the weights in the target vector are equal to 1
(t = (1,1, 1)), (ii) the initial value of all the indica-
tors is equal to 0 (i
A
= (0,0, 0)), (iii) the cost of each
project is unitary, and (iv) our budget is 2, i.e. we can
choose at most two projects amongst them. The post
intervention vectors for the projects are as follows:
• i
P1
= (1.0,0.0, 0.0)
• i
P2
= (0.9,0.0, 0.0)
• i
P3
= (0.5,0.3, 0.0)
• i
P4
= (0.5,0.0, 0.2)
It is easy to see that, if we compute the scoring func-
tion as defined in 4, the outcome is
f(t,i
A
,i
P1
) > f(t,i
A
,i
P2
) > f(t,i
A
,i
P3
) > f(t,i
A
,i
P4
)
Since there is budget for two projects, it would
seem natural to fund P1 e P2; but let us now consider
the post intervention vectors for all the possible pairs:
• i
(P1+P2)
= (1.0,0.0, 0.0)
• i
(P1+P3)
= (1.0,0.3, 0.0)
• i
(P1+P4)
= (1.0,0.0, 0.2)
• i
(P2+P3)
= (1.0,0.3, 0.0)
• i
(P2+P4)
= (1.0,0.0, 0.2)
• i
(P3+P4)
= (1.0,0.3, 0.2)
It is clear that, if we have to choose only two
projects, the best outcome is when we fund P3 and
P4, that, considered alone are worst than P1 and P2,
but together are better.
We can formally define the problem above dis-
cussed (for the sake of simplicity we do not include
the intervention target t):
MULTIPLE PROJECTS EVALUATION (MPE).
Given in input:
• an initial scenario S, represented by the values of
a set of indicators I = (i
1
,i
2
,...i
n
);
• a set of projects P = (p
1
, p
2
,... p
m
), each asso-
ciated with a cost (c
1
,c
2
,...c
m
) and a post inter-
vention vector (v
1
,v
2
,...v
m
); with I(p
j
) we de-
note the (estimated) values of the indicators after
the completion of project p
j
; if R ⊆ P with I(R)
we denote the (estimated) values of the indica-
tors after the completion of all the projects in R.
• a scoring function f : I → R;
• a real number b, representing the available bud-
get;
we look for a projects subset P
′
⊆ P, whose overall
cost is less than the budget, to maximize the scoring
function; more formally we look for a subset P
′
such
that:
•
∑
j:p
j
∈P
′ c
j
≤ b (budget constraint)
• ∀P
′′
⊆ P,P
′′
6= P
′
,
∑
j:p
j
∈P
′′ c
j
≤ b, f(P
′
) ≥ f(P
′′
)
(optimality constraint)
Can we design efficient algorithms able to solve
this problem? Unfortunately, the problem belongs to
the NPO complexity class, as stated in the following
theorem:
ICE-B2012-InternationalConferenceone-Business
90

Theorem 1. The optimization problem MPE, as de-
fined above, belongs to the NPO complexity class.
Proof. Let us now consider the decision problem as-
sociated with MPE, i.e. a the problem in which the
optimality constraint is replaced by the following
f(P
′
) ≥ S
where S is a parameter: now the problem is, given
also the parameter S, to find a subset P
′
such that
f(P
′
) ≥ S. Let us denote by Decision-MPE (DMPE)
this decision problem. To prove that MPE ∈ NPO
we will show that its corresponding decision problem
DMPE is NP-complete (NPO is the complexity class
of the optimization problems whose decision versions
belong to NP (Ausiello et al., 1999)).
We recall that, in order to prove that a problem B
is NP-complete, it is sufficient to show what follows
(see, e.g., (Garey and Johnson, 1979)):
1. There must be an NP-complete problem A such
that A ≤ B (A polynomially reduces to B).
2. B belongs to NP (e.g., by describing a polynomial
time algorithm for a non-deterministicTuring Ma-
chine able to solve it).
Let us now consider the following problem (Garey
and Johnson, 1979)
DOMINATING SET (DS).
INSTANCE: Graph G = (V,E) and a positive integer
K ≤ |V|.
QUESTION: Is there a subset V
′
⊆ V such that |V
′
| ≤
K, and such that every vertex v ∈ V −V
′
is joined to
at least one member of V
′
by an edge in E?
The Dominating Set problem is NP-complete
((Garey and Johnson, 1979)); let us nowdefine a mod-
ified version, where the underlying graph is directed:
DIRECTED DOMINATING SET (DDS).
INSTANCE: Directed graph G = (V,E) and a positive
integer K ≤ |V|.
QUESTION: Is there a subset V
′
⊆ V such that |V
′
| ≤
K, and such that every vertex v ∈ V −V
′
is joined to
at least one member ofV
′
by an outgoing edge in E?
We know prove that DMPE is NP-complete, and
our proof is articulated in the following steps:
1. DS ≤ DDS;
2. DDS ≤ DMPE;
3. DMPE ∈ NP.
Step 1: DS ≤ DDS. To show that DS reduces
to DDS we simply consider the following transfor-
mation: we change every undirected edge {a,b} of
the DS instance into the two directed edges (a,b) and
(b,a). It is easy to check that every solution of the
DDS instance obtained in this way is also a solution
of the related DS instance.
Step 2: DDS ≤ DMPE. To map the generic DDS
instance into one DMPE instance we will:
• each node v ∈ V is mapped into a project p ∈ P;
• each node v is also mapped into an indicator i ∈ I;
• the initial value of each indicator is equal to 0;
• for each node v ∈ V, for each outgoing edge (v, w)
we set equal to 1 the w-th components of the post
intervention vector associated with node v;
• for each node v ∈ V we also set equal to 1 the v-th
components of the post intervention vector asso-
ciated with the node;
• each project p
i
is associated with a cost c
i
=1;
• we set b = K;
• the objective function is f =
∑
∀i∈I,i≥1
1 (it counts
the number of indicators equal to 1);
• we set S = n = |V|.
Informally, the reduction is as follows: each node v
is mapped into a project able to cover all the nodes
reached by v, together with node v itself. The budget
is able to select only K nodes/projects and the param-
eter S is set in such a way that all the nodes must be
either dominators or dominated.
Step 3: DMPE ∈ NP. To show that DMPE ∈
NP is sufficent to observe that this problem can be
solved by generating all the possible subsets of P and
by checking if one of them satisfies the constraint
f(P
′
) ≥ S. A non-deterministic Turing Machine can
simply guess at step i whether to include or not the
i-th project in the solution, and then check the con-
straint at the last step: therefore it takes linear time to
solve it, and this imply that DMPE ∈ NP.
6 CONCLUSIONS
We addressed the scenario where an organ of a public
administration, i.e. the decisionmaker, is requested
to plan one or more interventions in some framework
related to the InformationSociety or the eGovernment
set of actions.
We proposed a methodology to support the deci-
sionmaker in orienting, planning, and evaluating mul-
tiple (partially overlapping) interventions. In partic-
ular, we address two main problems: first, how to
decide the structure of the interventions and how to
determine the relevant parameters involved; second,
how to set up a scoring system for comparing single
interventions and its extension to the case of multiple
interventions. The surprising result from this formal
Planning,DesigningandEvaluatingMultipleeGovernmentInterventions
91

analysis is that not always the best projects together
achieve the best outcome.
We formally modeled the problem and discussed
its computational complexity, showing that it is NP-
complete the problem of the selection of the projects
whose overall outcome is maximized.
REFERENCES
Ausiello, G., Protasi, M., Marchetti-Spaccamela, A., Gam-
bosi, G., Crescenzi, P., and Kann, V. (1999). Com-
plexity and Approximation: Combinatorial Optimiza-
tion Problems and Their Approximability Properties.
Springer-Verlag New York, Inc.
Berge, C. (1970). Graphes et Hypergraphes. Dunod, Paris.
Diestel, R. (2006). Graph Theory. Graduate Texts in Math-
ematics. Springer.
eGEP (2012). eGovernment Unit - DG Information Soci-
ety and Media - European Commission. eGovernment
Economics Projects - Measurements Framework. Fi-
nal Deliverable, available at http://rso.it/eGEP.
European Commission (2010). . Key ICT indicators for
the Member States, Norway and Iceland. i2010
Annual Information Society Report 2007, Vol. 3.
http://ec.europa.eu/information
society/eeurope/i2010.
Fudenberg, D. and Tirole, J. (2002). Game Theory. MIT
Press.
Garey, M. R. and Johnson, D. S. (1979). Computers
and Intractability: A Guide to the Theory of NP-
Completeness. W. H. Freeman and Company.
Ojo, A. K., Janowski, T., and Estevez, E. (2005). Deter-
mining progress towards e-government: What are the
core indicators? In Proc. of the 5th European Confer-
ence on e-Government, pages 312–322. ACL, Read-
ing, UK.
Papadimitriou, C. M. (1994). Computational complexity.
Addison-Wesley.
Smith, C. (2009). Economic indicators. In Wankel, C., edi-
tor, Encyclopedia of Business in Today’s World. SAGE
Publications, Inc., California, USA.
Understand (2006). Understand (European regions UN-
DER way towards STANDard indicators for bench-
marking information society). Methodological Hand-
book. Available at http://www.understand-eu.net/.
ICE-B2012-InternationalConferenceone-Business
92
