
A Particle Swarm Optimization Algorithm
for the Grasp Planning Problem
Chiraz Walha, Hala Bezine and Adel M. Alimi
REGIM: Research Group on Intelligent Machines, University of Sfax, National Engineering School of Sfax (ENIS),
BP 1173, 3038, Sfax, Tunisia
Keywords: Grasp Planning, Robotic Hand, Particle Swarm Optimization (PSO).
Abstract: Computing a set of contact points between a robotic hand and an object in order to fulfill some criteria is the
main problem of the grasp planning. An automatic grasp planning can produce a set of joint angles defining
a configuration of the robotic hand. The huge number of solutions that satisfy a good grasp is the main
difficulty of such a planner. In this paper, we represent the grasp planning problem as an optimization
problem and we propose a new algorithm based on a Particle Swarm Optimization (PSO) technique. To
generate the positions of the fingertips, the kinematic of the hand is modeled. Therefore, a simple PSO
algorithm is described to optimize the workspace of the operating hand based on a quality of measure of the
grasp. The simulation results support the effectiveness of our approach.
1 INTRODUCTION
The most complicated task that a robot is asked to
achieve is to take an object and bring it to another
place. Many configurations of the hand can be found
considering the high dimension of the wrench space,
the huge number of possible contact points in the
surface of the object and the many degrees of
freedom of the robotic hand. However, finding the
positions of the fingertips on the object can be really
competitive since some criteria had to be taken into
account like the stability of the grip, minimization of
the friction, etc. Therefore, grasp planning problem
is considered as an optimization problem.
To grasp an object, some information is needed,
like the position and the shape of the object
(Infantino et al., 2003), its material, the actual
localization of the robotic hand (Chesi and Hung,
2007) (Chesi, 2009) and its kinematic model
(Boughdiri et al., 2011), etc. All this information
should be considered during the grasping process.
Some can be collected using camera devise or
sensor, and others, like the material and the weight
of the object, should be defined by the user. This
information serves as input to the grasp planner. The
output is the position of the fingertips on the object
or the configuration of the posture of the hand (the
joints angles of the fingers and wrist associated with
the position of the hand).
In this paper, we propose a novel grasp planner
based on Particle Swarm Optimization algorithm.
The main purpose of the method is to explore the
dexterous manipulation space of a multi-fingered
robot hand and to find the best configuration of the
fingers that enables the grasp as fast as possible.
For a successful gripping of the object, several
grasp planners have been developed (Shimoga,
1996), (Coelho and Grupen, 1996), (Morales et al.,
2006). Zhixing et al., (2009) have classified these
planners on forward and backward direction. The
forward direction follows these steps:
close the fingers on the object
extract the joint angles using the kinematic
model of the hand
detect the positions of the fingertips at
collision, using the collision detection
technique
evaluate the grasp quality
This methodology is evaluated in the simulator
(Miller and Allen, 1999), (Miller and
Allen, 2004), which have been used for analyzing
and visualizing the grasps of a variety of different
hands and objects. This grasp planner includes two
phases, the first one is to generate a configuration of
the hand using shape primitives (Miller et al., 2003),
and the second one, is to evaluate the quality of
these grasps. The backward direction is object-
centred solution and is presented as follow:
130
Walha C., Bezine H. and Alimi A..
A Particle Swarm Optimization Algorithm for the Grasp Planning Problem.
DOI: 10.5220/0003996501300135
In Proceedings of the 9th International Conference on Informatics in Control, Automation and Robotics (ICINCO-2012), pages 130-135
ISBN: 978-989-8565-21-1
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
contact points are randomly or analytically
located on the object surface
evaluate the grasp quality
find the corresponding feasible finger joint
position using an inverse kinematic algorithm
Fuentes, Marengoni and Nelson (1994) have
presented a grasp planner based on genetic algorithm.
They posed the grasp planning problem as a search
problem. Borst et al., (1999) used a heuristic
approach to plan a precision grasp for a 3D objects.
Pelossof et al., (2004) presented an SVM approach
involving a combination of numerical methods to
recover parts of the grasp quality surface with any
Pollard (2005) presented a matching algorithm to
select appropriate grasps from a database based on the
shape of the object.
2 MODEL OF THE HAND
2.1 Presentation of the Degrees of
Freedom of the Modeled Hand
Our hand is a five-fingered human hand. Eventually,
the human hand has 27 degrees of freedom (Elkoura
and Singh, 2003) deployed like this:
6 at the wrist : 3 rotations and 3 translations,
4 for each finger : 1 DOF for flexion/extension
at each of the three joints and 1 DOF for the
abduction/adduction (Agur and Lee, 1999)
the thumb has 5 DOF (Buchholz and
Armstong, 1992), the carpo-metacarpal joint
has 3 degrees of freedom: abduction /
adduction, flexion / extension and a pseudo-
rotation due to incongruity between the carpal
bones and the base of the thumb metacarpal
and the relaxation of the ligaments connecting
them and 1 for each of the two joints.
The human hand interacts under static and
dynamic constraints (Wagner, 1988). The static
constraints explain the limits of joint angles and the
dynamic constraints describe the interconnection
between the degrees of freedom of the finger joints.
Amongst these biomechanical constraints, we are
interested in the relationship between the distal and
proximal phalanges and which can be translated by
the following equation:
(1)
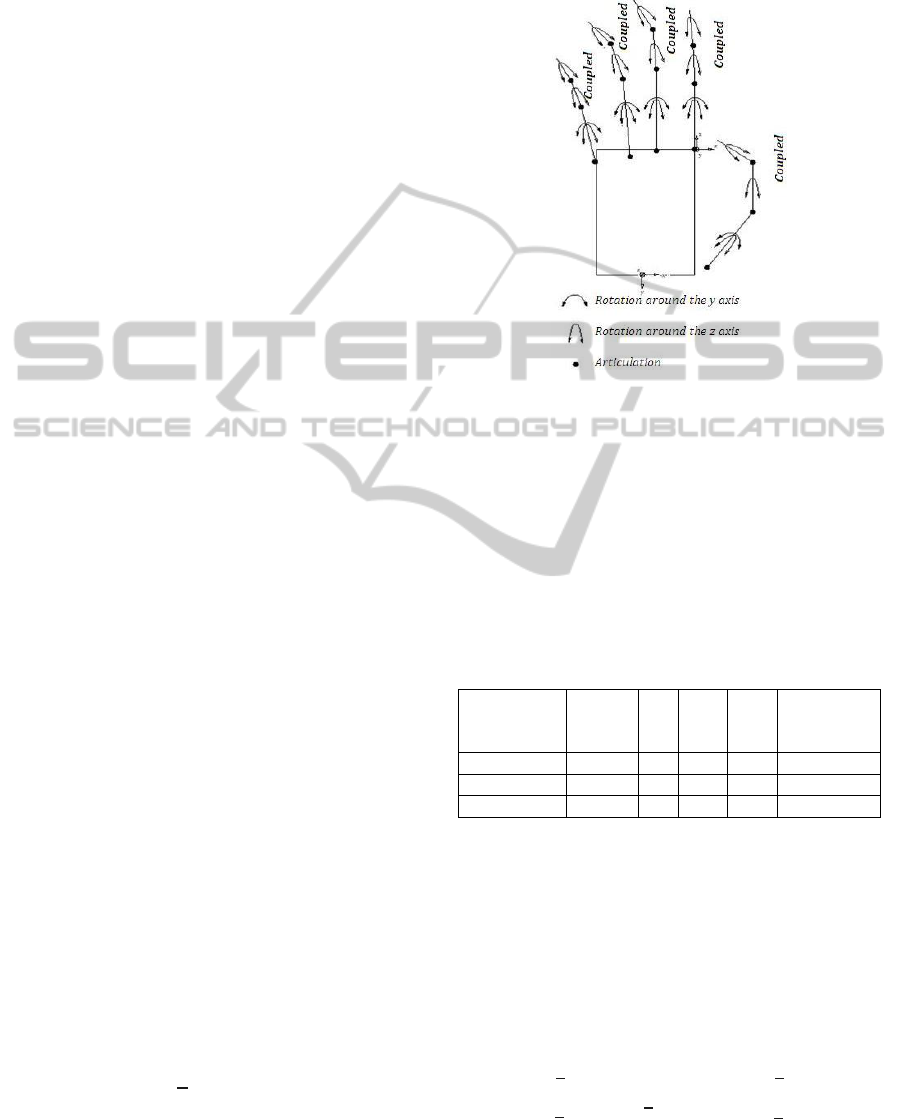
Therefore and to model the hand, we opted for an
optimization of the DOF by coupling the distal and
proximal joints. This allows us to simplify the model
to 21 DOF (Figure 1): 3 DOF for each of the fingers
and 6 DOF for the wrist.
Figure 1: Distribution of the 21 degrees of freedom of the
modeled hand.
2.2 Kinematics of the Hand
The kinematic of the modeled hand is used to
determine the positions and velocity of articulations in
space relative to the robot base coordinator. The
Denavit-Hartenberg parameters (Denavit and
Hartenberg, 1955) are given in this table:
Table 1: The Denavit-Hartenberg parameters of the finger
with 3 DOF.
Articulation
ij
d
ij
a
ij
ij
Variable
of the
articulation
1
θ
i1
0
l
i1
0
θ
i1
2
3/2*θ
i1
0
l
i2
0
θ
i1
3
θ
i2
0
l
i3
θ
i3
θ
i2,
θ
i3
i1
i2
i3
represent the angles of the
articulations of the finger i and l
i1
, l
i2
and l
i3
represent the length of each phalange of the finger i.
Therefore, the transformation matrix from the
coordinator 0 to 3 of the finger i is given by:
(2)
(3)
A Particle Swarm Optimization Algorithm for the Grasp Planning Problem
131
(4)
(5)
We assume that,
The forward kinematic model is as follow:
(6)
Where represents the position and orientation
of the joint, is the configuration system and is the
Jacobian matrix.
3 PSO ALGORITHM
PSO (particle swarm optimization) (Kennedy and
Eberhart, 1995) is a population based on a search
algorithm and is initialized with a population of
random solutions, called particles. Not like other
computational techniques, each particle in PSO is
also associated with a velocity. The particles fly into
space with velocities which are dynamically
adjusted based on their historical behavior. This
technique has received more and more attention
because of its simplicity and success.
Inspired by this, we propose a particle swarm
optimization based algorithm for grasp planning
problem in which each of the joints of the hand is
viewed as a particle and we integrated this algorithm
in our grasp planner.
t of the joints.
Finger
Distal
Intermediate
Proximal
Pivot
Thumb
Index
Middle
Ring
Little
finger
The final purpose of the grasp planner is to find
the best location of contact points in the surface of
the object satisfying some criteria. Assuming
the particles represented by a
configuration of the hand. It contains the values of
the limitations of Table 2 (Brand and Hollister,
1999), (Buchholz et al., 1992). The velocity
associated to
is
with the
number of particles.
For each iteration, the velocity
and the particle
are
updated. According to the fitness values of the
updated individuals, the personal best angle
of each particle and the
global best position
among all
the particles are updated. For the update of the
velocities in PSO, a particle
is influenced by its
personal best position
and the global best
position
. Hence, the PSO searches the global
optimum solution by adjusting the trajectory of each
particle toward its personal best position and the
global best position. According to the above
description about the PSO, the procedure of the PSO
is described as following:
Step 1. Initialize the PSO with
m, the number of particles
, the number of iterations
Generate randomly initial configurations
, in the population taking
into consideration the limitations of Table II.
If an illegal collision is detected (case where a
finger enter the object perimeter), we generate
another values for the corresponding finger.
Generate randomly initial velocity vectors
Step 2. Calculate the fitness value of each particle
and set initial
,
and initial
for the initial population.
Set
where
represents the fitness value of the
particle
Set
and
Find the index I of the particle with best
fitness value by
Set
and
Set
Step 3. Update
and
.
Calculate
then set
and
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
132

then set
Step 4. Update the velocity vector
and the vector
of each particle.
- Update
where is a function returning a random value
between 0 and 1.
.
Set
Step 5. , if
then go to Step 6, else go to Step 3
Step 6. The desired solution is the global best
with the best fitness value
.
We assume that the position of the object is
reachable by the hand and the localization of the
object is known. Furthermore, we will restrict our
search of solution to a precise grasp which allows
only contact with the fingertips.
Although, we have 21 DOF, the six DOF of the
wrist is computed apart. It represents the position
and orientation of the hand.
We used HandGrasp (Walha et al., 2010) to
simulate the trajectories of the fingers in space.
HandGrasp is an environment used for hand
developed under a modular architecture (Walha et
al., 2011).
In our grasp strategy, the fitness function is based
on a quality measure ( et al.,
2006) associated with the position of the contact
points. It takes into account the object properties as
the shape, the weight, the size and the location. Park
and Starr (1992) have proven that the contact points
are distributed in a uniform way on the object
surface, this improves the grasp stability. The quality
of the grasp under this criterion, called the stability
grasp index (Kim et al., 2001), is given by:
(7)
Where:
is the quality measure,
is the number of fingers in contact with object,
the internal angle at vertex i of the contact
polygon,
is the average internal angle of the
corresponding regular polygon (in degrees) :
(in degrees),
is the sum of the internal angles when the polygon
has the poorest conditioned shape.
Each position of the fingertips is computed using
the kinematic of the hand and in each of the iteration,
the algorithm check if a contact is detected. The force
of the fingers is computed using the equation:
(8)
Where is the mass of the hand.
4 EXPERIMENTATION
The experiment is computed in HandGrasp. Given a
sphere with a diameter 5 cm, we run our grasp
planner in order to grip this object with our simulated
hand (Figure 2). The results of this simulation are
shown in figure 3.
Figure 2: Simulated hand.
After 50 iterations and with 100 particles, we
remark that the fingers are not all in contact with the
sphere since it is not a condition in our grasp planner.
In less than one second (Pentium Dual CPU, T3400
2.16 GHz * 2.16 GHz, 3 GB of RAM), the algorithm
has generated the desired grasp. The second test is
applied to a cube with 7 cm length (Figure 4) and the
third test is for the object barrel (Figure 5).
Iteration=5 Iteration=20 Iteration=35 Iteration=50
Figure 3: Simulation results for the object sphere.
Iteration=5 Iteration=20 Iteration=35 Iteration=50
Figure 4: Simulation results for the object cube.
A Particle Swarm Optimization Algorithm for the Grasp Planning Problem
133

Iteration=5 Iteration=20 Iteration=35 Iteration=50
Figure 5: Simulation results for the object Barrell.
5 CONCLUSIONS
In this paper, a grasp planner based on a particle
swarm optimization is proposed to find optimum
positions of fingertips in the object, ensuring a
stability of the grip. In order to guaranty a good
grasp, a quality of measure function is computed.
Furthermore, we restricted the limits of value for
each particle so that the algorithm can generate a
faster solution. Our system performs very well with
simple objects.
In future works, we will adopt a multi-object
particle swarm optimization (MOPSO) (Reyes-Sierra
and Coello, 2006) to build a list of leaders to save the
chosen based on variety of a quality of measure
functions like quality based on the margin of
uncertainty in the finger positions or Max-Normal-
Grasping-Force quality (Liu et al., 2004).
ACKNOWLEDGEMENTS
The authors would like to acknowledge the financial
support of this work by grants from General
Direction of Scientific Research (DGRST), Tunisia,
under the ARUB program.
REFERENCES
Agur, A. M. R. and Lee, M. J. (1999). Grant's Atlas of
Anatomy. Lippincott Williams and Wilkins, 10th
Edition.
Bicchi, A. (2000). Hands for dexterous manipulation and
robust grasping: A difficult road towards simplicity.
IEEE Trans. Robotics and Automation 16(6), 652662.
Borst, C.; Fischer, M. and Hirzinger, G. (1999). A fast and
robust grasp planner for arbitrary 3D objects. In
ICRA’1999, Proc. IEEE Intl. Conf. on Robotics and
Automation, pages 1890 - 1896, Detroit, Michigan,
USA.
Boughdiri, R.; Bezine, H.;
and Alimi, A. M. (2011). Dynamic modeling of a
multi-fingered robot hand in free motion.
International Multi-Conference on Systems, Signals &
Devices SSD’11, Sousse Tunisia.
Brand, P. W. and Hollister, A. M. (1999). Clinical
Mechanics of the Hand. Mosby, Inc. Third edition.
Buchholz, B. and Armstong, T. J. (1992). A kinematic
model of the human hand to evaluate its prehensile
J. Biomecanics, 25 : 2, pp. 149-162.
Buchholz, B.; Armstrong, T. and Goldstein, S. (1992).
Anthropometric data for describing the kinematics of
the human hand. Ergonomics, 35(3):261273.
Chesi G. and Hung Y.S. (2007). Global path-planning for
constrained and optimal visual servoing, IEEE Trans.
on Robotics, vol. 23, no. 5, pp. 1050-1060.
Chesi G. (2009). Visual servoing path-planning via
homogeneous forms and LMI optimizations. IEEE
Trans. on Robotics, vol. 25, no. 2, pp. 281-291.
Chinellato, E.; Morales, A.; Fisher, R. B.; and del Pobil,
A. P. (2005). Visual quality measures for
characterizing planar robot grasps. IEEE Trans.
Systems, Man and Cybernetics - Part C: Applications
and Reviews, 35(1), 3041.
Coelho, J. A. Jr. and Grupen, R. A. (1996). Online grasp
synthesis. IEEE Int. Conf. on Robotics and
Automation.
Denavit, J. and Hartenberg, R. S. (1955). A kinematic
notation for lower-pair mechanisms based on matrices.
Trans ASME J. Appl. Mech, 23:215221.
Elkoura, G. and Singh, K. (2003). Handrix - animating the
human hand. Proceedings of the 2003 ACM
SIGGRAPH/Eurographics Symposium on Computer
Animation pp. 110-119.
Fuentes, O.; Marengoni, H. F. and Nelson, R. C. (1994).
Vision-based planning and execution of precision
grasps. TR546, Computer Science Dept., U.Rochester.
Infantino, I.; Chella, A.; Dzindo, H. and Macaluso, I.
(2003). Visual control of a robotic hand. In
IROS’2003, IEEE/RSJ International Conference on
Intelligent Robots and Systems, vol.2, no., pp. 1266-
1271 vol.2, 27-31.
Kennedy, J. and Eberhart, R. C. (1995). Particle swarm
optimization. Proceedings of IEEE International
Conference on Neural Networks, Piscataway, pp.
1942-1948.
Kim B., Oh S., Yi B. and Suh I. H. (2001). Optimal
grasping based on non-dimensionalized performance
indices. Proc. IEEE IROS 2001, pp. 949956.
Li, Y. and Pollard, N. S. (2005). A shape matching
algorithm for synthesizing humanlike enveloping
grasps. Humanoids’2005, IEEE-RAS International
Conference on Humanoid Robots, Tsukuba, Japan, pp
442-449.
Liu, G.; Xu, J.; Wang, X. and Li, Z. (2004). On quality
functions for grasp synthesis, fixture planning and
coordinated manipulation. IEEE Trans. Automation
Science and Engineering, 1(2), 146162.
Miller A. T. and Allen, P. K. (1999). Examples of 3D
grasp quality computations. In Proceedings IEEE
International Conference on Robotics and
Automation, Detroit, MI, pp. 1240-1246.
Miller, A. T. and Allen, P. K. (2004). Graspit!: a versatile
simulator for robotic grasping. IEEE Robotics and
Automation Magazine, vol. 11, no. 4, pp. 110-122.
ICINCO 2012 - 9th International Conference on Informatics in Control, Automation and Robotics
134

Miller, A. T.; Knoop, S.; Christensen, H. I. and Allen, P.
K. (2003). Automatic grasp planning using shape
primitives. In Proceedings of the IEEE International
Conference on Robotics and Automation, pp. 1824-
1829.
Morales, A.; Asfour, T. and Azad, P. (2006). Integrated
grasp planning and visual object localization for a
humanoid robot with five-fingered hands. IEEE/RSJ
Int. Conf. on Intelligent Robots and Systems.
Park Y. C. and Starr G. P. (1992). Grasp synthesis of
polygonal objects using a three-fingered robotic hand.
Int. J. Robotics Research 11(3), 163184.
Pelossof, R.; Miller, A. T.; Allen, P. K. and Jebara, T.
(2004). An SVM learning approach to robotic
grasping. IEEE Int. Conf. on Robotics and
Automation, New Orleans, pp. 3512-3518.
Reyes-Sierra, M. and Coello, C. A. C. (2006). Multi-
Objective Particle Swarm Optimizers: A Survey of the
State-of-the-Art. International Journal of
Computational Intelligence Research, Vol. 2, No. 3.
287-308.
Shimoga, K. B. (1996). Robot grasp synthesis: a survey.
Int. J. of Robotics Research, Vol.5, No.3.
). Grasp quality
measures. Technical University of Catalonia, Tech. Rep.
Wagner, C. (1988). The pianist's hand: anthropometry and
biomechanics. Ergonomics 31: 1, pp. 97-131.
; Naamane, A. and
Alimi, A. M. (2011). HandGrasp: a new simulator for
human grasping. Workshop on Autonomous Grasping
at ICRA’2011, IEEE International Conference on
Robotics and Automation, Shanghai Chine.
Alimi, A. M. (2010). Contribution to the development
of a theory of generation of grasping movements.
WIMTA'2010, The 17th Workshop Intelligent
Machines : Theory and Applications, Mahdia, Tunisia.
Zhixing, X.; Stadie, U.; Zoellner, J. M. and Dillmann, R.
(2009). An efficient grasp planning system using
impulse-based dynamic simulation. Multybody
Dynamics, Warsaw, Poland.
A Particle Swarm Optimization Algorithm for the Grasp Planning Problem
135
