
TOWARDS EFFICIENT ON-LINE SCHEDULABILITY TESTS
FOR ADAPTIVE NETWORKED EMBEDDED REAL-TIME
SYSTEMS
Klaus Becker, Marc Zeller and Gereon Weiss
Fraunhofer Institute for Communication Systems ESK, Hansastrasse 32, 80686 Munich, Germany
Keywords:
Schedulability Tests, Networked Embedded Systems, Adaptive Systems, Real-time.
Abstract:
In networked embedded systems, runtime adaptive software promises an increase of flexibility, fault tolerance
and extensibility. Often, this requires that software components have to be allocated dynamically to execution
platforms at runtime. Hence, the platforms have to execute dynamically changing task sets. However, in
real-time systems, a task set cannot be executed without previously checking its schedulability w.r.t. given
timing constraints. Therefore, it has to be determined, whether or not the existing task set would be still
schedulable including newly arriving tasks. In this paper, we propose a schedulability test algorithm for such
systems, exploiting the situation of adding a new task to an existing task set. Therefore, we adapt existing
schedulability tests to exploit the specific acceptance test use case. The benefits of the developed adaptations
are shown by experimental investigations.
1 INTRODUCTION
In recent years, software has been increasingly in-
tegrated into a wide range of industrial application
domains, while such embedded systems have experi-
enced an enormous growth of complexity. The net-
worked embedded software interacts with mechan-
ical parts of the system and offers the bulk of the
functionality. Inside these systems, often the con-
tained embedded software components are distributed
over multiple execution platforms and interact with
each other over communication infrastructure to solve
different types of tasks collaboratively. In today’s
networked embedded systems, the allocation of sin-
gle software components onto the different execu-
tion platforms is mostly designed statically and does
not change during runtime. In opposition to these
static systems, a runtime adaptive system would pro-
vide several advantages (Oreizy et al., 1998). Ex-
amples are the possibility to react dynamically on
hardware or software errors (Self-Healing) (Streichert
et al., 2008), and the ability to start and stop software
components during runtime, so that only the software
components are active at a given time that are cur-
rently required. This allows an optimal usage of hard-
ware resources, in order to minimize the amount of
required hardware, which also results in minimizing
the energy consumption (Self-Optimization) (Weiss
et al., 2011).
In order to take advantage of these facts in a net-
worked embedded system, it is necessary to be able to
add new tasks to execution platforms during runtime
or to migrate running tasks from one platform to an-
other (Structural Adaption (McKinley et al., 2004))
(Zeller et al., 2011). However, before adding a new
task to an execution platform, it is essential to keep
track of given timing requirements, which have to
be fulfilled by each of the tasks. A schedule has
to be determined for the execution of the currently
active tasks, so that no task violates its timing con-
straint, also called deadline. If these requirements
cannot be ensured, a new task is not allowed to run
on the platform. Thereby, the existing tasks can still
meet their deadlines, assuming that this was the case
before. Systems possessing those timing constraints
are generally called real-time systems. The schedul-
ing criteria are the priorities that are assigned to the
tasks. For many industrial application domains of
networked embedded systems, like automotive, these
priorities are fixed and do not change during runtime.
However, usually the priorities are defined by the sys-
tem designer and not via a specific method like the
rate monotonic (RM) priority assignment, introduced
in (Liu and Layland, 1973).
440
Becker K., Zeller M. and Weiss G. (2012).
TOWARDS EFFICIENT ON-LINE SCHEDULABILITY TESTS FOR ADAPTIVE NETWORKED EMBEDDED REAL-TIME SYSTEMS.
In Proceedings of the 2nd International Conference on Pervasive Embedded Computing and Communication Systems, pages 440-449
DOI: 10.5220/0003941804400449
Copyright
c
SciTePress

In this paper, we analyze schedulability tests for
sets of independent preemptive tasks with fixed prior-
ities, blocking times due to resource constraints, and
release jitters. The analyses are performed with the
intention to provide a schedulability test, which is ap-
plicable on-line in adaptive embedded real-time sys-
tems. Therefore, existing approaches for schedulabil-
ity tests are adapted in order to be usable as on-line
acceptance tests for newly arriving tasks at runtime.
Moreover, they are adapted to be compatible to the
mentioned task model and to support tasks that have
arbitrary priorities. Afterwards, the investigated algo-
rithms and their adaptations are evaluated by means of
their efficiency for randomly generated task sets. Also
the effect of the used priority assignment is evaluated,
providing results about the differences in assigning
fixed priorities arbitrarily or rate monotonically.
However, only local acceptance tests are analyzed
in the scope of this paper. No holistic schedulabil-
ity tests that provide an end-to-end analysis includ-
ing message transfer times are considered. Though,
messages could be integrated easily into the shown
approaches. It is shown in (Pop et al., 2003) and (Lei
et al., 2004) that during schedulability tests, messages
can be treated like non-preemptive tasks and commu-
nication channels can be treated a hardware platforms.
The following section gives a brief overview over
state-of-the-art schedulability test algorithms.
2 RELATED WORK
Schedulability tests are specifically designed for the
type of task sets, for which they are applied. In this
paper, we assume task sets with fixed priorities. One
way to assign fixed priorities is to assign them related
to the task periods. If the periods are equal to the
deadlines, this is called the rate monotonic (RM) pri-
ority assignment. This is shown to be optimal in (Liu
and Layland, 1973), meaning that no other fixed prior-
ity assignment can result in a higher degree of schedu-
lability. If the deadlines are smaller than the periods,
the deadline monotonic (DM) priority assignment is
optimal (Audsley et al., 1991).
In (Liu and Layland, 1973) also an approach to
test the schedulability of task sets having RM priori-
ties is introduced. This test is based on the total pro-
cessor utilization U =
∑
n
i=1
C
i
T
i
, where C
i
is the Worst
Case Execution Time (WCET) and T
i
is the period of
a task τ
i
. It is shown that task sets with RM priorities
are schedulable, if U ≤ n ·
2
1
n
− 1
. This test is only
sufficient but not necessary, because there may exist
task sets Γ
n
with higher utilizations than n ·
2
1
n
− 1
,
which are schedulable, but are wrongly categorized
as non-schedulable by the test. However, systems
with arbitrary fixed priorities cannot be tested via this
mechanism. A sufficient test for those systems was
introduced in (Bini and Baruah, 2007). This test is
not based on the processor utilization, but on the de-
termination of an upper bound of the Worst Case Re-
sponse Time (WCRT) R
i
of any task τ
i
∈ Γ
n
and its
comparison to the respective relative deadline D
i
.
A sufficient and necessary (and thereby exact) test
for task sets with fixed priorities was introduced in
(Joseph and Pandya, 1986), called the Response Time
Analysis (RTA). This schedulability test observes ev-
ery single task and calculates the interferences to the
current task by all higher or equal prioritized tasks in-
side a specific time interval. Notice that the algorithm
assumes that all tasks are released synchronously, be-
cause this release corresponds to the so-called criti-
cal instant, which leads to the WCRTs of all tasks,
as shown in (Liu and Layland, 1973). The calcula-
tion is an iterative progress, because if interferences
are found inside the current interval, the interval in-
creases and new interferences may appear later. Via
this, the latest possible finishing time of every task
can be calculated and it can be proven, whether this
lies prior to the respective deadline. If this is the case,
the analyzed task is schedulable and the next task can
be analyzed. Under the assumption of existing max-
imum blocking times B
i
(while using an appropriate
resource access protocol) and maximum release jitters
J
i
, the RTA can be described in a formal way by the
following recurrence relation, introduced in (Audsley
et al., 1993):
R
(0)
i
= B
i
+C
i
I
(k)
i
=
∑
∀ j∈hep(τ
i
)
&
R
(k)
i
+ J
j
T
j
'
C
j
R
(k+1)
i
= B
i
+C
i
+ I
(k)
i
(1)
The calculation has to be continued, as long as the
response time R
(k+1)
i
6= R
(k)
i
and R
(k+1)
i
≤ D
i
− J
i
. As
soon as R
i
converges to a constant value, or R
i
ex-
ceeds D
i
− J
i
, the calculation can be stopped. The
subset hep(τ
i
) corresponds to the subset of tasks that
have a priority higher than or equal to the analyzed
task τ
i
. This algorithm is exact for independent pre-
emptive tasks with fixed priories and without offsets.
However, the runtime is deterministic but has a quite
poor performance, compared to non-exact sufficient
tests. Because of this, there exist several investiga-
tions about how to increase the performance of the
RTA. An overview about state of the art techniques
is given in (Davis et al., 2008). These techniques are
based on increasing the initial value R
(0)
i
of the RTA,
TOWARDS EFFICIENT ON-LINE SCHEDULABILITY TESTS FOR ADAPTIVE NETWORKED EMBEDDED
REAL-TIME SYSTEMS
441

thereby less iterations are required, which decreases
the required runtime. Some of these techniques still
allow an exact calculation of the WCRTs and other do
not support an exact calculation, but still provide an
exact Boolean answer about the schedulability. Be-
cause the latter initial values result in a higher effi-
ciency and the Boolean answer satisfies all require-
ments of an on-line acceptance test, these values are
used in the further proceeding of this paper.
It is shown by empirical investigation in (Davis
et al., 2008) that using the maximum value of the fol-
lowing theorems 1, 2 and Equation (2) as initial value
for the RTA leads to the best overall performance, if
a Boolean answer is enough. Both theorems provide
an upper bound on the WCRT R, while the equation
provides a lower bound.
Theorem 1. Using the initial value (D
i
− J
i
) − R
UB
i−1
,
the recurrence relation converges to R
UB
i
, where R
i
≤
R
UB
i
≤ D
i
− J
i
, if τ
i
is schedulable. Though, here it is
assumed that τ
i−1
is schedulable and therefore R
UB
i−1
≤
(D
i−1
− J
i−1
).
Theorem 2. Using the initial value (D
i
− J
i
+ C
i
+
B
i
)/2, the recurrence relation converges to R
UB
i
,
where R
i
≤ R
UB
i
≤ D
i
− J
i
, if τ
i
is schedulable.
R
LB
i
=
C
i
1 −
∑
i−1
j=1
U
j
(2)
Also alternative implementations were shown in
the mentioned paper, resulting in a higher efficiency.
Some of these will later be selected in the evaluation
section of this paper.
Beside the previously mentioned task model, oth-
er task models may consist of tasks that have static
or dynamic offsets, building so-called linear or tree-
shaped transactions. This means that tasks are not
activated independently from each other, but instead
a group of tasks belonging to one transaction is ac-
tivated with relative time offsets, forming a defined
sequence of task activations. The first algorithm con-
sidering transactions was presented in (Tindell, 1994).
In this approach, offsets are assumed to be static and
smaller than the period of the corresponding transac-
tion. It describes a technique to calculate the exact
response times, which is computationally intractable
for large task sets. Because the algorithm is NP-
complete, the runtime grows exponentially depend-
ing on the number of tasks. This work was extended
in (Palencia and Harbour, 1998) in the way that also
dynamic offsets that may be greater than the period of
the corresponding transaction are supported, as well
as tasks that suspend themselves. The algorithm is
called WCDO (Worst Case analysis for Dynamic Off-
sets). Another exact schedulability test for tasks with
static offsets was shown in (Lauer et al., 2010). In
spite of the also exponential runtime, the evaluation
results are better due to the assumption that there ex-
ist a single clock and no jitters in a distributed system.
In this way, many cases can be excluded that have
to be analyzed otherwise. Further work in this area
has been done by (Palencia et al., 1999) and (Redell,
2004) by considering precedence relations of tasks.
(Palencia et al., 1999) considers linear transactions,
in which at most one task may depend directly on an-
other. The presented algorithm is called WCDOPS
(Worst Case Dynamic Offsets with Priority Schemes).
In (Redell, 2004) an improved WCDOPS+ algorithm
is presented, which additionally considers situations
in which multiple tasks may depend on one task di-
rectly and are activated synchronously at the finishing
time of this task. Such dependencies are called tree-
shaped transactions. However, task sets with offsets
are not further considered in this paper.
In this work, we focus on task sets without offsets
in order to provide more efficient solutions for accep-
tance tests for these task sets. In the scope of this
work we denote solutions efficient w.r.t. computa-
tional effort for analyzing schedulability for a task set.
For task sets without offsets, it can be concluded that
the improved variants of the RTA, using increased ini-
tial values and alternative implementation techniques,
promise the best efficiency when applied as on-line
acceptance test for task sets with arbitrary fixed pri-
orities. However, the RTA can be further adapted to
exploit this special use case. Also combinations of
the RTA and the sufficient tests promise an increase
of the overall performance. The developed adapta-
tions of the RTA and also of some sufficient tests will
be presented in the next section.
3 EFFICIENT ON-LINE
ACCEPTANCE TESTS
A core requirement for on-line acceptance tests is ef-
ficiency w.r.t. computational effort, because the ex-
ecution of the concurrently running tasks should not
be influenced by the acceptance test. In our use case
of executing a schedulability test as on-line accep-
tance test for new arriving tasks, the performance of
the original exact RTA algorithm can be improved ex-
ploiting this special use case. This is, because the for-
mer task set has already been proven to be schedu-
lable, yielding some information about their WCRTs
that can be reused. Moreover, the performance can be
increased by the fact, that not all of the existing tasks
have to be proven again, but only a subset. In the
following sections, some adaptations to the RTA and
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
442

also some promising sufficient (pessimistic) schedu-
lability test algorithms are presented.
3.1 Adaptations of the RTA
In addition to using the improved initial values that
were introduced in (Davis et al., 2008), further adap-
tations of the RTA are possible that exploit the special
use case of an acceptance test, whereby the efficiency
can be increased further.
While using the RTA as an acceptance test for a
new task τ
new
, the fact can be exploited that the for-
mer existent task set was schedulable and only the
effects of τ
new
have to be investigated. If this new
task does not require any resources, it does not in-
crease the maximum blocking times B
i
of higher pri-
oritized tasks. Hence, only the other tasks with equal
or lower priority than τ
new
have to be analyzed again.
The higher prioritized tasks are not influenced by τ
new
in this case, because their WCRT does not change. In
the other case, in which τ
new
increases the blocking
time B
j
of a higher prioritized task τ
j
, even τ
j
has to
be tested again as well as all intermediate tasks with
lower or equal priority than τ
j
.
Because the former task set was analyzed in ad-
vance, we have already some knowledge about the
WCRTs of the single tasks in this task set, due to
the formerly executed RTA. These already computed
response times can be reused later as initial values
during the repeated execution of the acceptance test
caused by a newly arriving task. Hence, there are
two possibilities at this point. We could either use
the improved initial values from (Davis et al., 2008)
1
,
or simply reuse the calculated old WCRTs as initial
values for the anew analysis of the old tasks.
These old exact response times are valid initial
values, because in single-core systems the new task
may only change these response times to appear later,
not earlier. Hence, the RTA recurrence relation will
converge definitely and stay exact. However, the
new task has to be analyzed with the initial value
C
new
+ B
new
in the latter case, because no reusable re-
sponse time is known. If a task leaves an execution
platform, the former calculated WCRTs of the other
tasks on this platform become pessimistic and should
be recalculated in the idle time, before a new task ar-
rives. Reusing the old WCRTs as initial values could
be more efficient than calculating the initial values
from (Davis et al., 2008), because nearly no computa-
tional overhead is required. Instead, the former stored
values can be read and reused immediately. The effect
of the chosen initial value is evaluated later in Section
4.4.
1
Maximum of theorems 1, 2 and Equation (2).
An implementation of the RTA, which is usable
as an efficient acceptance test for a new task τ
new
,
is shown as pseudo code in Figure 1. Only those
tasks are analyzed again, which have a priority not
greater than the highest prioritized task, whose block-
ing time is increased by τ
new
. In the best case, τ
new
produces no new blocking times, meaning that only
tasks with P
j
≤ P
new
have to be tested. In the worst
case, the maximum blocking time of the highest pri-
oritized task changes, necessitating a reanalysis of all
tasks. It is assumed that for every existent task τ
j
,
there is a variable R
old
j
, in which the calculated re-
sponse time of a former executed RTA can be stored.
Furthermore, it is assumed that tasks are ordered de-
scending by their priorities and have unique id’s from
1 to n, meaning that τ
1
has the highest priority and τ
2
has either the same or a lower one. Notice that this
implementation is based on the alternative incremen-
tal implementation of the RTA introduced in (Davis
et al., 2008).
The function addToTaskSet in line 2 adds τ
new
to
Γ
n
and returns the merged task set Γ
n+1
. The func-
tion recalculateBlockingTimes recalculates all block-
ing times B
i
and returns the highest priority P
i
of a
task, for which B
i
is increased by the new task τ
new
.
A higher value for P
i
denotes a higher priority. The
function getInitialValue in line 17 could return the
mentioned old response time R
old
ua
of the analyzed task
τ
ua
, or simply C
ua
+B
ua
, if the new arriving task is an-
alyzed. Alternatively, the function could also return
the maximum of theorems 1, 2 and Equation (2) for
all tasks.
The incremental implementation is recognizable
in lines 34-36. Here, R is not used as a constant dur-
ing one iteration for all interfering tasks, but instead
R is increased dynamically for each task. Afterwards,
the increased R is used for the calculation of the in-
terference by the next examined task, resulting in less
required iterations and an increased performance.
This algorithm terminates immediately in line 8
as soon as one task has been found, which violates
its deadline. Hence, the remaining tasks do not need
to be tested, because the task set is already known to
be not schedulable. Furthermore, the loops in line 19
and 31 have to iterate over all tasks, instead of running
only up to the predecessor of τ
ua
. This is necessary,
because some equally prioritized tasks may be behind
τ
ua
in the ordered task list. Once a task with a lower
priority has been reached, the loops can be aborted.
In spite of all these improvements, the compu-
tational effort of the exact RTA is still higher than
for some sufficient but not necessary schedulability
tests. Hence, under efficiency requirements, it would
be helpful to use such a fast sufficient test in advance.
TOWARDS EFFICIENT ON-LINE SCHEDULABILITY TESTS FOR ADAPTIVE NETWORKED EMBEDDED
REAL-TIME SYSTEMS
443
1: procedure ACCEPTANCETEST(Taskset Γ
n
, Task τ
new
)
2: Γ
n+1
← addToTaskSet(Γ
n
, τ
new
)
3: P
high
← recalculateBlockingTimes(Γ
n
, τ
new
)
4: for i ← 1 to n+1 do
5: if P
i
≤ P
high
then
6: R
i
← getResponseTime(Γ
n+1
, τ
i
)
7: if R
i
> D
i
− J
i
then
8: return FALSE
9: end if
10: end if
11: end for
12: return TRUE
13: end procedure
14:
15: procedure GETRESPONSETIME(Taskset Γ
n
, Task τ
ua
)
16: interference[n]
17: R
prev
← getInitialValue(τ
ua
)
18: R ← C
ua
+ B
ua
19: for j ← 1 to n do
20: if P
j
≥ P
ua
then
21: if τ
j
6= τ
ua
then
22: interference[j] ←
l
R
prev
+J
j
T
j
m
C
j
23: R ← R + interference[j]
24: end if
25: else
26: break all other tasks have P
j
< P
ua
27: end if
28: end for
29: while ((R > R
prev
) and (R ≤ D
ua
− J
ua
)) do
30: R
prev
← R;
31: for j ← 1 to n do
32: if P
j
≥ P
ua
then
33: if τ
j
6= τ
ua
then
34: tmp ←
l
R+J
j
T
j
m
C
j
35: R ← R + (tmp - interference[j])
36: interference[j] ← tmp
37: end if
38: else
39: break all other tasks have P
j
< P
ua
40: end if
41: end for
42: end while
43: return R
44: end procedure
Figure 1: Adapted implementation of the RTA for on-line
acceptance tests.
Afterwards, the RTA has to be executed only in cases
where the task set has not been identified as schedu-
lable by the sufficient test before. One approach to
provide a sufficient test is adapted in the following,
in order to support also tasks with equal priorities,
blocking times and release jitters.
3.2 Adaptations of Sufficient Tests
In this section, an adaptation of the sufficient test in-
troduced in (Bini and Baruah, 2007) is provided. This
adaptation extends the original test to support also
blocking times B
i
and release jitters J
i
. The test is
based on the calculations of upper bounds R
UB
i
for the
response time R
i
of every task τ
i
. If ∀i : R
UB
i
≤ D
i
−J
i
,
the task set is schedulable. If not, the schedulability is
not known, because it may happen that R
i
≤ D
i
−J
i
<
R
UB
i
.
The original equation from (Bini and Baruah,
2007) without B
i
and J
i
is now shown for compari-
son:
R
UB
i
=
C
i
+
∑
j∈hep(i)
C
j
(1 −U
j
)
1 −
∑
j∈hep(i)
U
j
This can be extended by B
i
and J
i
as follows:
R
UB
i
=
B
i
+C
i
+
∑
j∈hep(i)
C
j
(1 −U
j
) +
∑
j∈hep(i)
J
j
U
j
1 −
∑
j∈hep(i)
U
j
(3)
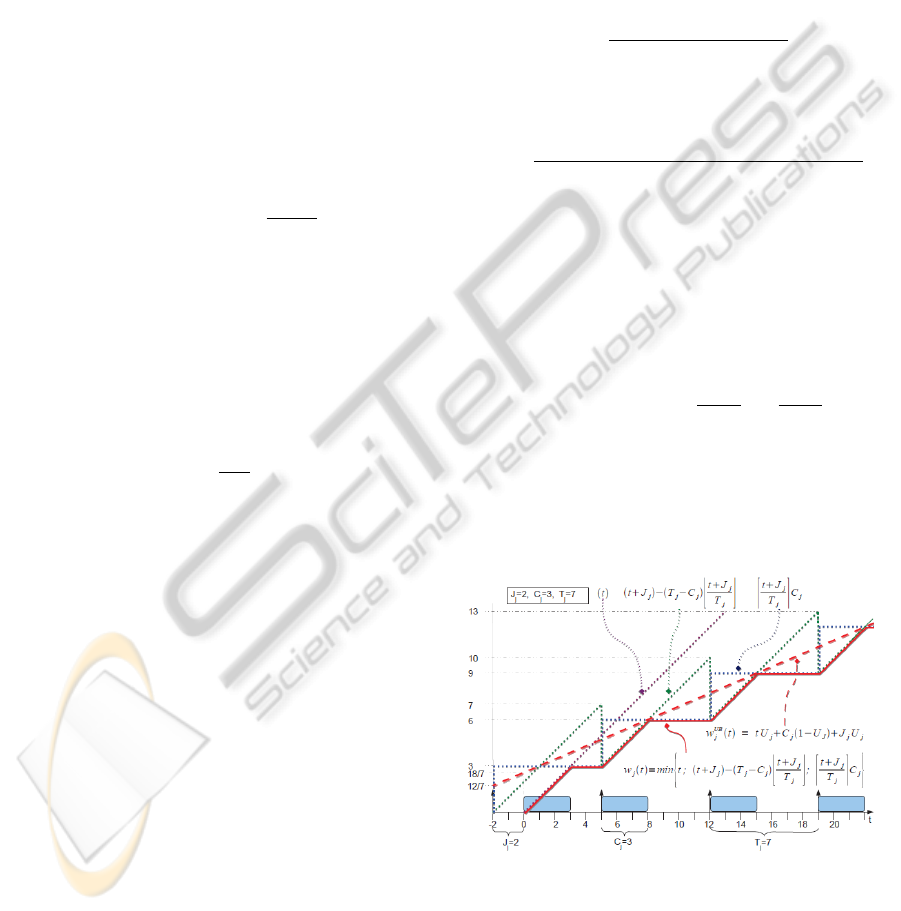
To prove the correctness of Equation (3), let’s con-
sider without loss of generality a task τ
j
with the ex-
emplary parameters J
j
= 2,C
j
= 3,T
j
= 7. What is
the maximum workload w
j
(t) of this task in a time
interval [0,t]? In the presence of release jitters, this is
w
j
(t) =
min
t;(t + J
j
) − (T
j
−C
j
)
t + J
j
T
j
;
t + J
j
T
j
C
j
In (Bini and Baruah, 2007), this workload function
was similarly introduced, but without the J
j
and the
first candidate t, which is also required due to the re-
lease jitters. The way to achieve this workload func-
tion is visualized in Figure 2.
Figure 2: Finding a tight R
UB
for a sufficient test.
In this figure, the three candidates for the mini-
mum values of w
j
(t) are shown for the mentioned
example task in the three dotted lines. The mini-
mum of these candidates is denoted by the continu-
ous line. To find an upper bound on w
j
(t), we have to
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
444

find a function that is never smaller than this continu-
ous line. This is denoted by the dashed straight line.
Like shown in (Bini and Baruah, 2007), the slope of
this dashed line is tU
j
. However, the value at time
t = 0 changes in our case due to the release jitter to
C
j
(1−U
j
)+J
j
U
j
, which is 18/7 for the example task.
Notice that the first instance of this task is activated at
t = −2 and released at t = 0. In the absence of release
jitters, the task would be released at t = −2, resulting
in C
j
(1 −U
j
) = 12/7. In conclusion, the function to
calculate an upper bound on w
j
(t) can be expressed
by:
w
UB
j
(t) = tU
j
+C
j
(1 −U
j
) + J
j
U
j
This results in the following upper bound R
UB
i
for
the worst case response time R
i
.
R
i
≤ B
i
+C
i
+
∑
j∈hep(i)
w
UB
j
(R
i
)
= B
i
+C
i
+
∑
j∈hep(i)
(R
i
U
j
+C
j
(1 −U
j
) + J
j
U
j
)
R
i
≤
B
i
+C
i
+
∑
j∈hep(i)
C
j
(1 −U
j
) +
∑
j∈hep(i)
J
j
U
j
1 −
∑
j∈hep(i)
U
j
= R
UB
i
This is equal to Equation (3) and hence, the proof
is completed.
Using this upper bound provides a tight suffi-
cient test for task sets with arbitrary fixed priorities.
However, calculating this upper bound for every an-
alyzed task may require some computational effort
due to the three sums in Equation (3). But as long
as the tasks are analyzed in descending priority or-
der, one possibility to confine this effort is to store
the already computed sub-sums during the analysis
of higher tasks, and to reuse them for analyzing the
lower tasks. Thereby, the entire sums do not have to
be computed newly for every analyzed task. Instead,
the sums can simply be reused and extended during
the sequence of analyzed tasks. Nevertheless, tasks
with equal priorities must be considered explicitly,
because all tasks with equal priorities to the analyzed
task have to be treated like higher tasks. However,
some of them may be ordered behind the analyzed
task in the task list, which complicates the reuse of
the sub-sums.
An efficient implementation of this sufficient test,
which handles the problem of tasks with equal pri-
orities and stores and reuses the sub-sums, is shown
in Figure 3. The benefit of this response time based
sufficient test compared to the utilization based suf-
ficient test from (Liu and Layland, 1973) is that not
only task sets with RM priority assignment are sup-
ported, but also task sets having arbitrary fixed pri-
orities. Such task sets with arbitrary priorities may
1: sumUj ← 0
∑
(U
j
)
2: sumCj1mUj ← 0
∑
(C
j
(1 −U
j
))
3: sumJjUj ← 0
∑
(J
j
U
j
)
4: lastCheckedTaskPrio ← ∞;
5:
6: procedure SUFFICIENTTEST(Taskset Γ
n
)
7: if
∑
n−1
i=0
U
i
> 1 then
8: return FALSE
9: end if
10: for i ← 1 to n do
11: R
UB
i
← getRUpperBound(Γ
n
, τ
i
)
12: if R
UB
i
> D
i
− J
i
then
13: return FALSE
14: end if
15: end for
16: return TRUE
17: end procedure
18:
19: procedure GETRUPPERBOUND(Taskset Γ
n
, Task τ
ua
)
20: for j ← 1 to n do
21: if lastCheckedTaskPrio > P
j
and P
j
≥ P
ua
then
22: U
j
← C
j
/T
j
23: sumUj ← sumUj + U
j
24: sumCj1mUj ← sumCj1mUj + C
j
(1 −U
j
)
25: sumJjUj ← sumJjUj + J
j
U
j
26: else if P
j
< P
ua
then
27: break all other tasks have P
j
< P
ua
28: end if
29: end for
30: remove the portion of τ
ua
from the sums
31: U
ua
← C
ua
/T
ua
32: sumUj
ua
← sumUj - U
ua
33: sumCj1mUj
ua
← sumCj1mUj - C
ua
(1 −U
ua
)
34: sumJjUj
ua
← sumJjUj - J
ua
U
ua
35: calculate the final upper bound on R
36: temp ← (B
ua
+C
ua
+sumCj1mUj
ua
+sumJjUj
ua
)
37: R
UB
ua
← temp/(1−sumUj
ua
)
38: lastCheckedTaskPrio ← P
ua
39: return R
UB
ua
40: end procedure
Figure 3: Implementation of the adapted sufficient test.
appear in different industrial application domains of
embedded systems (e.g. the automotive domain) due
to certain constraints.
4 EXPERIMENTAL RESULTS
In this section, we present evaluations of the previ-
ously introduced algorithms. The experiments are
performed for task sets with rate monotonic (RM)
priorities as well as for task sets with arbitrary fixed
priorities. The algorithms are implemented in Java
and executed on a standard personal computer, hav-
ing a 3.16 GHz CPU. To reduce the impacts of the
JIT-Compiler and Garbage-Collector to the measured
time, the algorithms are executed multiple times per
TOWARDS EFFICIENT ON-LINE SCHEDULABILITY TESTS FOR ADAPTIVE NETWORKED EMBEDDED
REAL-TIME SYSTEMS
445

task set and the average runtime is determined. Fur-
thermore, the algorithms are executed for 100 differ-
ent task sets, which are generated randomly based
on uniformly distributed task utilizations U
i
. Each
task set consists of 150 tasks. The random genera-
tion of the utilizations is based on the so-called UU-
niFast algorithm (Bini and Buttazzo, 2005). The other
task parameters are either also determined randomly,
or depending on other parameters (e.g. the WCET
C = U ·T ). However, some parameters have assumed
restrictions. For RM tasks, B
i
and J
i
are set to zero
and D
i
= T
i
. For arbitrary fixed priority task sets, B
i
is
random but at most equal to C
i
, whereas J
i
is at most
10% of T
i
. Additionally, D
i
≤ T
i
but at least 80% of
T
i
. Beside this, all tasks are independent, preemptive
and have no offsets.
The remainder of this section presents the results
of the experiments with the adapted schedulability
tests (cf. sections 3.1 and 3.2) by means of their re-
quired execution time in ms. Each experiment is done
for both types of randomly generated task sets, having
either RM or arbitrary fixed priorities.
4.1 Improvements of the RTA
Figure 4 shows the evaluation results of the RTA
improvements. This includes the standard RTA
implementation (cf. Equation 1), its incremental
implementation using standard initial values (algo-
rithm from Figure 1, but not aborting in line 8 and
getInitialValue(τ
ua
) returns B
ua
+C
ua
) and the incre-
mental implementation using the maximum of theo-
rems 1, 2 and Equation (2) as initial value. These
three algorithms are implemented in such a way that
they do not terminate directly at the first found non-
schedulable task. Instead, they continue and deter-
mine the total number of non-schedulable tasks in the
task set. Though, this is not required for an on-line
acceptance test. Because of this, the fourth (dotted)
line in the figures shows the runtime of the incremen-
tal RTA using the maximum of the three mentioned
initial value candidates that terminates immediately at
the first found non-schedulable task (algorithm from
Figure 1). Obviously, this is faster than continuing
and checking also the remaining tasks.
Figure 4(a) shows the runtimes of the mentioned
algorithms, if applied to task sets with RM priori-
ties. Figure 4(b) shows the runtimes of the same algo-
rithms, if applied to task sets with priorities assigned
in an arbitrary manner. Because assigning priorities
in a RM manner is optimal, the second priority as-
signment can only result in a lower degree of schedu-
lability. It can be seen that the relative difference of
the first three algorithms does not change significantly
(a) RM task set.
(b) Task set with arbitrary fixed priorities.
Figure 4: Using RTA for schedulability tests.
due to the used task model. The dashed line shows
the incremental implementation using the maximum
of theorems 1, 2 and Equation (2) as initial value
and checking all tasks. This is faster than using the
standard initial value in the standard and incremental
RTA, shown by the first two lines.
The main difference between the two task mod-
els appears at the fourth algorithm (dotted line) that
immediately terminates at the first non-schedulable
task. For RM task sets, every utilization up to around
69% is schedulable, because U ≤ n ·
2
1
n
− 1
≤ 150·
2
1
150
− 1
≈ 0.6948. Hence, the speedup effect of
this algorithm is only noticable for higher utilizations.
However, in task sets with arbitrary priorities, even
very low utilizations may be not schedulable. This
results in the much lower runtime of the fourth algo-
rithm in Figure 4(b), because non-schedulable tasks
are found even for low utilizations.
4.2 Improvements of Sufficient Tests
The results of applying sufficient tests to task sets
with RM or arbitrary priorities are shown in figures
5(a) and 5(b). Both figures show the runtimes of
the original response time based test from (Bini and
Baruah, 2007) and its extended efficient implementa-
tion, introduced in Figure 3.
It can be seen in Figure 5(a) that for RM task
sets the runtime of the implementation from Figure
3 is nearly 30% lower than the runtime of the original
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
446
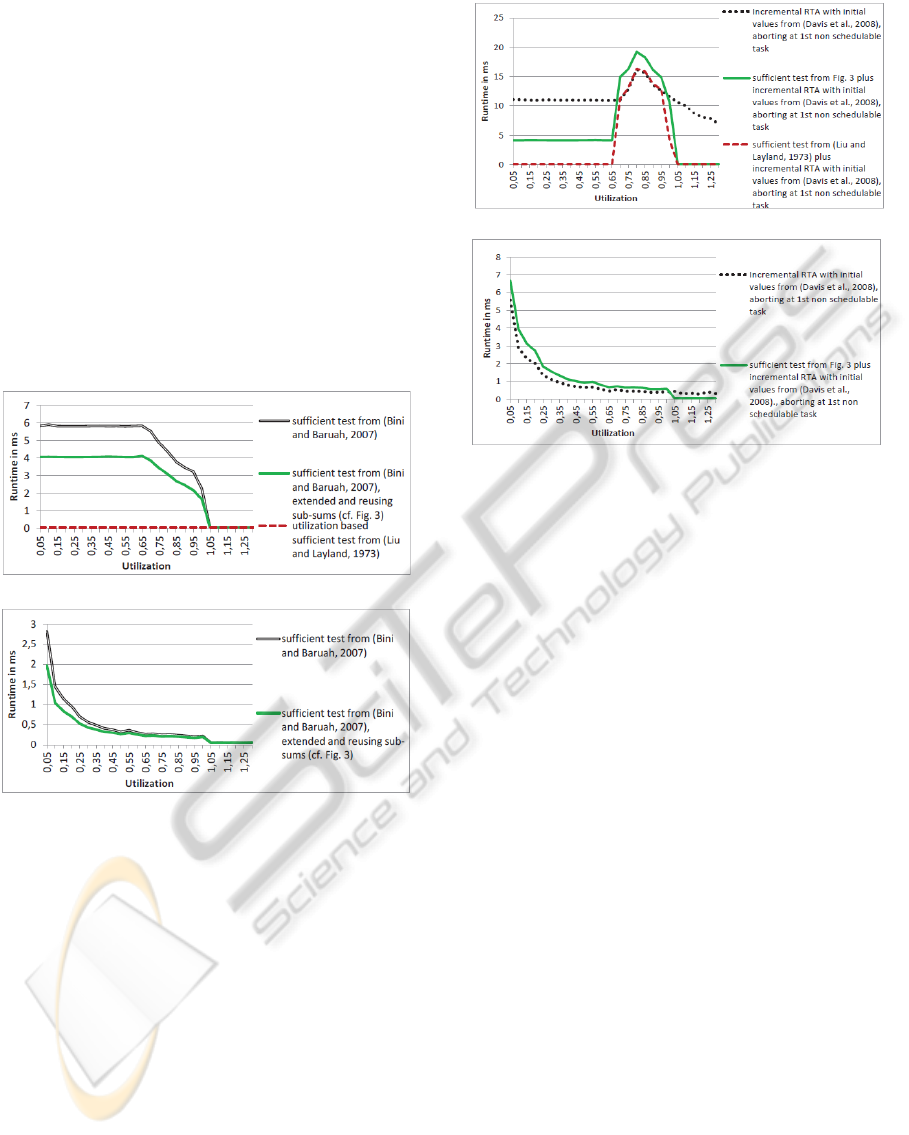
variant. Notice that both runtimes begin to decrease
for utilizations bigger than round about 69%. This is,
because the test immediately terminates, as soon as a
non-schedulable task is found. For lower utilizations,
no non-schedulable tasks are found. Therefore, the
runtime keeps constant. Also the utilization based test
from (Liu and Layland, 1973) is shown in Figure 5(a).
Its runtime is by far the best, but it cannot be applied
for tasks with arbitrary priorities. Hence, this test is
not shown in Figure 5(b). This figure shows that the
runtime of both response time based sufficient tests is
much lower than in the RM case. This occurs due to
the existing non-schedulable tasks even for low uti-
lizations. The implementation introduced in Figure 3
is again faster than the original version because of the
reuse of already computed sub-sums.
(a) RM task set.
(b) Task set with arbitrary fixed priorities.
Figure 5: Experimental results of sufficient tests.
4.3 Using a Sufficient Test Prior to the
RTA
The execution times of the most sufficient tests are
much better than the runtimes of the RTA variants,
evaluated in Section 4.1. However, they are pessimis-
tic in some way and cannot determine all schedulable
task sets. Hence, it is promising to combine both al-
gorithm types. At first, a relatively fast sufficient test
is applied, and afterwards the slower RTA is applied
only if the sufficient test fails.
Figure 6(a) shows the results of this combination,
when applied to RM task sets. The results of the com-
binations are shown as continuous and dashed line.
The dotted line shows the runtime of solely executing
the incremental RTA with improved initial values. For
(a) RM task set.
(b) Task set with arbitrary fixed priorities.
Figure 6: Experimental results of combinations of RTA and
sufficient tests.
U ≤ 69%, the sufficient tests are always successful,
redundantizing the RTA. Thus, both combinations are
faster than using the single RTA in this area. The con-
tinuous line shows the runtime, if the sufficient test
from Figure 3 is used prior to the RTA. The dashed
line shows the same combination, but using the suf-
ficient utilization based test introduced in (Liu and
Layland, 1973) instead. Our evaluation shows that
the latter combination is much faster than the former
one. However, for utilizations higher than 69%, both
sufficient tests cannot guarantee the schedulability in
all cases. Hence, the RTA has to be executed subse-
quently, too. This results in an overall runtime which
is higher than the dotted line. Because a task set can-
not be schedulable for U > 1, the RTA is not executed
subsequently in this case, resulting in a runtime near
to zero.
Figure 6(b) shows the analogous experiment ap-
plied for arbitrary fixed priority task sets. Only the
sufficient test presented in Figure 3 is used in com-
bination with the RTA here, because the other suffi-
cient test from (Liu and Layland, 1973) is not applica-
ble. Because the sufficient test fails in almost all cases
even for low utilizations, no efficiency improvement
can be achieved and the total runtime of the combina-
tion is greater than using the RTA alone.
4.4 Adding a New Task
As mentioned before, the exploitation of the follow-
TOWARDS EFFICIENT ON-LINE SCHEDULABILITY TESTS FOR ADAPTIVE NETWORKED EMBEDDED
REAL-TIME SYSTEMS
447
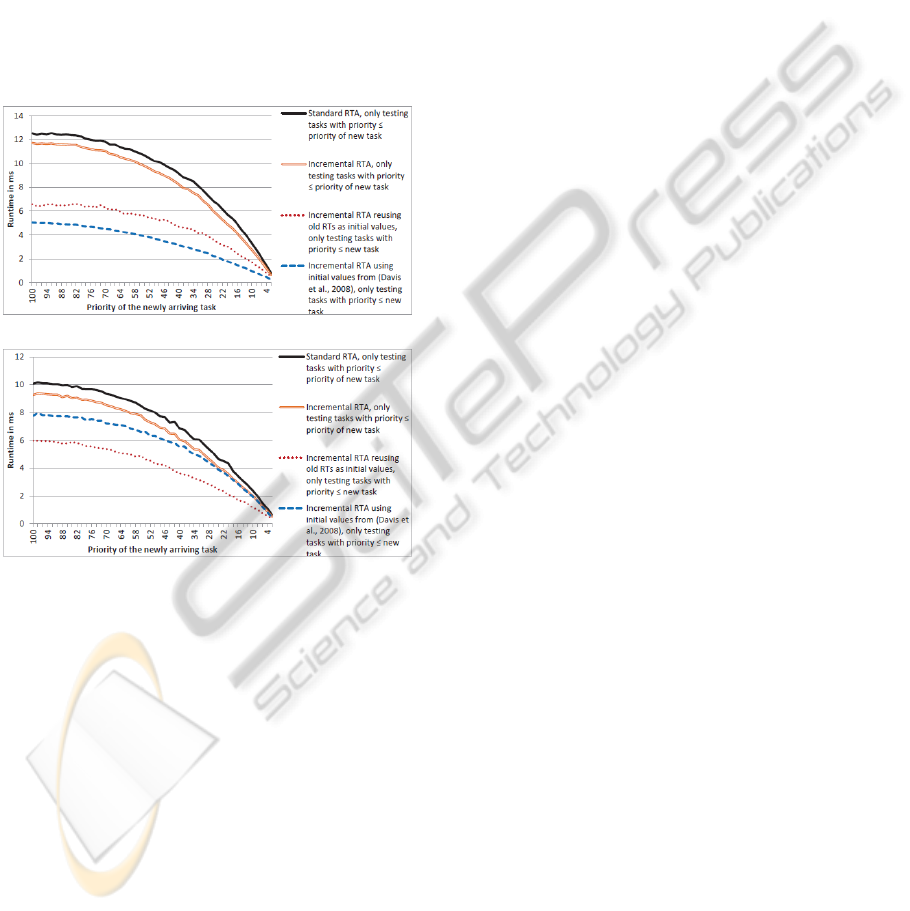
ing situation can also lead to a further improvement
of the RTA: In the case of an arrival of a new task,
only those tasks have to be tested again, which are in-
fluenced by this new task directly via preemption or
via increased blocking times. This is valid under the
assumption that the task set was schedulable before,
without the new task. An implementation of this ap-
proach is presented in Figure 1.
Thus, if the RTA is used as an acceptance test for a
new task arriving in the system and if only tasks with
priorities lower or equal to the new task are tested
again, this results in the runtimes that are shown in
Figure 7.
(a) RM task set.
(b) Task set with arbitrary fixed priorities.
Figure 7: Experimental results of RTA variants, used as ac-
ceptance test for one new added task.
All evaluations are performed under the assump-
tions that the already existing task set comprises 100
tasks with priorities from 1 to 100, and that the total
utilization of the existing task set is 70%. Then, one
new task with variable priority between 1 and 100 is
added, wherefore the acceptance test is executed. It
is assumed that the new task does not increase any
blocking times of higher prioritized tasks. Hence, no
higher prioritized task has to be tested. If otherwise
the new task would increase any blocking times of
such tasks and these tasks must also be tested again.
This would result in a lower performance.
It can be seen in both figures that the lower the pri-
ority of the new task is, the less tasks have to be tested
again and the less the computational effort is. The
curves are convex, because analyzing a task with low
priority requires more time than analyzing a task with
high priority. Hence, the speedup effect per omitted
analysis of a low priority task is higher than per omit-
ted high priority task.
As before, the standard RTA implementation has
the lowest performance (upper continuous line) and
is improved by its incremental implementation (lower
continuous line). This is further improved again, if we
use better initial values. It can be seen in Figure 7(a)
that for RM task sets, it is better to use the initial val-
ues from (Davis et al., 2008) (dashed line) than using
the old response times as initial values (dotted line).
This is surprising in such a way that the calculation of
the sophisticated initial values requires some amount
of time, while reusing the old response times gener-
ates no overhead. But the initial values from (Davis
et al., 2008) are much better, so that the overhead of
their calculation can be compensated. The RM task
set has unique RM priorities between 1 and 100 in
this experiment. Thereby, the periods are unique, too.
Figure 7(b) shows the analogous situation, but the
existing task set has arbitrary fixed priorities, which
are not assigned in a RM manner. Therefore, the
priorities and periods are independent, but both in a
range from 1 to 100. In contrast to the results pre-
sented in Figure 7(a) for the RM case, the approach
which uses the old response times of the existing task
set as initial values is the most efficient one. The rea-
son for this is that the sophisticated initial values from
(Davis et al., 2008) are almost always bigger than the
old response times for RM task sets. For task sets with
arbitrary fixed priorities, this is not the case. Hence,
the overhead for calculating the sophisticated initial
values cannot be compensated, here.
Though, due to the randomly generated task sets,
it is not ensured during the evaluation in Figure 7 that
the old task set was schedulable before. Because of
this, only variants of algorithms are evaluated that
do not terminate at the first non-schedulable task, but
also analyze the remaining tasks. This allows a useful
statement about their efficiency, regardless whether
the old task set was schedulable before, or not. But
obviously, if we do not analyze the whole task set, the
result of the analysis cannot be secure in such cases
where the old task set was not schedulable, because
some non-schedulable tasks may not be tested and
hence not found.
5 CONCLUSIONS AND FUTURE
WORK
In this paper, we analyzed some existing schedula-
bility tests according to their applicability as efficient
PECCS 2012 - International Conference on Pervasive and Embedded Computing and Communication Systems
448

on-line acceptance test in adaptive networked embed-
ded real-time systems. The aim is to enable run-
time adaptation in networked embedded systems with
hard real-time requirements. Some initially selected
schedulability tests were adapted in order to increase
their efficiency in the use case of an on-line accep-
tance test for new arriving tasks, or to make them in
general applicable to our considered task sets. This
includes the response time analysis and an existing
sufficient test. Also efficient implementations of both
algorithms were shown.
To estimate the benefits of the provided adapta-
tions, several types of experiments were done. Also
combinations of algorithms were evaluated, in which
sufficient tests are executed primary and the RTA
which is only executed in unsuccessful cases. While
for RM task sets, such combinations result in a huge
overall performance increase (cf. Figure 6(a)), this ef-
fect vanishes for task sets with arbitrary priorities (cf.
Figure 6(b)). Furthermore, we evaluated the use case
of adding a new task to an existing task set. For RM
task sets, using the initial values from (Davis et al.,
2008) was the fastest solution (cf. Figure 7(a)), but
for tasks with arbitrary fixed priorities simply reusing
the old response times as initial values was the fastest
approach (cf. Figure 7(b)). However, with both initial
values the adapted RTA results in a far better average
runtime, compared to analyzing all tasks every time.
In future work, the results achieved in this paper
for task sets without offsets are intended to be ex-
tended to offset based task sets. This includes on-line
acceptance tests for task sets with static or dynamic
offsets in linear or tree-shaped transactions. Also an
analysis should be done about combined task sets,
comprising tasks without offsets as well as tasks in
transactions.
REFERENCES
Audsley, N., Burns, A., Richardson, M., Tindell, K., and
Wellings, A. (1993). Applying new scheduling theory
to static priority pre-emptive scheduling. Software En-
gineering Journal, pages 284–292.
Audsley, N., Burns, A., Richardson, M., and Wellings,
A. (1991). Hard real-time scheduling: the deadline-
monotonic approach. In Proceedings of the 8th IEEE
Workshop on Real-Time Operating Systems and Soft-
ware, pages 133–137.
Bini, E. and Baruah, S. (2007). Efficient computation of
response time bounds under fixed-priority scheduling.
Proceedings of the 15th Int. Conference on Real-Time
and Network Systems, pages 95–104.
Bini, E. and Buttazzo, G. (2005). Measuring the perfor-
mance of schedulability tests. Real-Time Systems,
30(1):129–154.
Davis, R., Zabos, A., and Burns, A. (2008). Efficient ex-
act schedulability tests for fixed priority real-time sys-
tems. IEEE Transactions on Computers, 57(9):1261–
1276.
Joseph, M. and Pandya, P. (1986). Finding response
times in a real-time system. The Computer Journal,
29(5):390–395.
Lauer, C., Hielscher, K., German, R., and Pollmer, J.
(2010). Schedulability Analysis in Time-Triggered
Automotive Real-Time Systems. In IEEE Vehicular
Technology Conference Fall, pages 1–5.
Lei, W., Zhaohui, W., and Mingde, Z. (2004). Worst-
case response time analysis for OSEK/VDX compli-
ant real-time distributed control systems. In Proceed-
ings of the 28th Int. Computer Software and Applica-
tions Conference, pages 148–153.
Liu, C. and Layland, J. (1973). Scheduling algorithms for
multiprogramming in a hard-real-time environment.
Journal of the ACM, 20(1):46–61.
McKinley, P., Sadjadi, S., Kasten, E., and Cheng, B.
(2004). Composing adaptive software. IEEE Com-
puter, 37(7):56–64.
Oreizy, P., Medvidovic, N., and Taylor, R. N. (1998).
Architecture-based runtime software evolution. In
Proceedings of the 20th International Conference on
Software Engineering, pages 177–86.
Palencia, J. and Harbour, M. (1998). Schedulability analysis
for tasks with static and dynamic offsets. In Proceed-
ings of the 19th IEEE Real-Time Systems Symposium,
pages 26–37.
Palencia, J., Harbour, M., et al. (1999). Exploiting prece-
dence relations in the schedulability analysis of dis-
tributed real-time systems. In Proceedings of the 20th
IEEE Real-Time Systems Symposium, pages 328–339.
Pop, T., Eles, P., and Peng, Z. (2003). Schedulability analy-
sis for distributed heterogeneous time/event-triggered
real-time systems. In Proceedings of the 15th Euromi-
cro Conference on Real-Time Systems, pages 257–
266.
Redell, O. (2004). Analysis of tree-shaped transactions
in distributed real time systems. In Proceedings of
the 16th Euromicro Conference on Real-Time Systems,
pages 239–248.
Streichert, T., Haubelt, C., Koch, D., and Teich, J. (2008).
Concepts for self-adaptive and self-healing networked
embedded systems. Organic Computing, pages 241–
260.
Tindell, K. (1994). Adding time-offsets to schedulability
analysis. Department of Computer Science, University
of York, Report Number YCS-94-221.
Weiss, G., Zeller, M., and Eilers, D. (2011). Towards au-
tomotive embedded systems with self-x properties. In
New Trends and Developments in Automotive System
Engineering. InTech.
Zeller, M., Weiss, G., Eilers, D., and Knorr, R. (2011). An
approach for providing dependable self-adaptation in
distributed embedded systems. In Proceedings of the
2011 ACM Symposium on Applied Computing, pages
236–237.
TOWARDS EFFICIENT ON-LINE SCHEDULABILITY TESTS FOR ADAPTIVE NETWORKED EMBEDDED
REAL-TIME SYSTEMS
449
