
TRAFFIC LIGHTS DETECTION IN ADVERSE CONDITIONS
USING COLOR, SYMMETRY AND SPATIOTEMPORAL
INFORMATION
George Siogkas, Evangelos Skodras and Evangelos Dermatas
Electrical and Computer Engineering Department, University of Patras, Rio, Patras, Greece
Keywords: Traffic Light Detection, Computer Vision, Fast Radial Symmetry, Adverse Conditions, Spatiotemporal
Persistency.
Abstract: This paper proposes the use of a monocular video camera for traffic lights detection, in a variety of
conditions, including adverse weather and illumination. The system incorporates a color pre-processing
module to enhance the discrimination of red and green regions in the image and handle the “blooming
effect” that is often observed in such scenes. The fast radial symmetry transform is utilized for the detection
of traffic light candidates and finally false positive results are minimized using spatiotemporal persistency
verification. The system is qualitatively assessed in various conditions, including driving in the rain, at night
and in city roads with dense traffic, as well as their synergy. It is also quantitatively assessed on a publicly
available manually annotated database, scoring high detection rates.
1 INTRODUCTION
Advanced Driver Assistance Systems (ADAS) are
new emerging technologies, primarily developed as
automated advisory systems to enhance driving
safety. One of the most challenging problems for such
systems is driving in urban environments, where the
visual information flow is very dense and can cause
fatigue, or distract the driver. Aside from moving
obstacles like cars and pedestrians, road signs and
traffic lights (TL) significantly influences the
reactions and decisions of the driver, which have to be
made in real time. The inability to make correct
decisions can lead to serious, even fatal, accidents.
Traffic light violations in particular, are one of the
most common causes of road crashes worldwide.
This is where ADAS can provide help that may
prove life-saving. A very big portion of such
systems is based on visual information processing
using computer vision methods. Whether in the form
of completely automated driving systems, using only
visual information, or in the form of driver alert
systems, technology can provide crucial assistance
in the efforts to reduce car accidents. Both the
aforementioned systems have to include a reliable
and precise Traffic Light Detection (TLD) module,
so that accidents in intersections are mitigated.
The idea of using vision for ADAS in urban
environments so that TLD can be achieved was first
introduced in the late 90’s, by (Loy and Zelinsky,
2002) who proposed a computer vision based Stop
& Go algorithm using a color on-board camera.
However, the use of computer vision for ADAS
bloomed in the next decade, as computer processor
speeds reached a point that enabled real-time
implementation of complex algorithms. The work of
(Lindner et al., 2004) proposes the fusion of color
cameras, GPS and vehicle data to increase the
robustness of their TLD algorithm, which is
followed by a tracking and a classification module.
The TLD part uses RGB color values, texture and
shape features. In the HSV space, color thresholding
followed by a Gaussian filtering process and a
verification of TL candidates is the approach of (In-
Hak et al., 2006) to detect TLs in crossroads. A
similar approach is followed by (Yehu Shen et al.,
2009), based on HSV images and a Gaussian
distribution-based model acquired by training
images. A post processing phase utilizes shape and
temporal consistency information to enhance the
results. A more straight-forward process is proposed
by (M. Omachi and Omachi, 2009), who locate
candidate regions in the normalized RGB color
space and validate the results using edge and
620
Siogkas G., Skodras E. and Dermatas E..
TRAFFIC LIGHTS DETECTION IN ADVERSE CONDITIONS USING COLOR, SYMMETRY AND SPATIOTEMPORAL INFORMATION.
DOI: 10.5220/0003855806200627
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2012), pages 620-627
ISBN: 978-989-8565-03-7
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

symmetry detection. Color information has been
ignored by (de Charette and Nashashibi, 2009a),
who use grayscale spot detection followed by an
Adaptive Template Matcher, achieving high
precision and recall rates in real time. Their results
were tested thoroughly and compared to the results
of an AdaBoost method using manually annotated
videos in (de Charette and Nashashibi, 2009b). The
problem of TLD in day and night scenes has been
addressed by (Chunhe Yu et al., 2010) using RGB
thresholding and shape dimensions to detect and
classify lights in both conditions.
By reviewing related literature to date, the
following conclusions can be drawn about vision
based TL detection:
Researchers have not always used color
information; when they do, they prefer either
the HSV, or RGB color spaces.
Many groups have used empirical thresholds
that are not optimal for all possible driving
conditions (i.e. shadows, rain, and night).
Generally, adverse conditions are not very
frequently addressed.
Symmetry is frequently used, either with
novel detection techniques, or with the well-
known Hough transform, but never with the
fast radial symmetry transform (Loy and
Zelinsky, 2003).
Traffic lights candidate detection is followed
by a validation process, required to exclude
false positive results. The use of TL models,
tracking, or both is the most common solution.
Apart from (Robotics Centre of Mines
ParisTech, 2010) that provides a publicly
available annotated database of on-board
video frames taken in Paris, to the best of our
knowledge, there are no other annotated
databases for traffic lights detection.
This paper presents a TLD algorithm inspired by
the approaches followed for road sign detection, by
(Barnes and Zelinsky, 2004), (Siogkas and
Dermatas, 2006) and (Barnes et al., 2008). The Fast
Radial Symmetry (FRS) detector of (Loy and
Zelinsky, 2003) is employed in the referenced
approaches, to take advantage of the symmetrical
geometry of road signs. The symmetry and color
properties are similar in road signs and traffic lights,
so these approaches can be a good starting point.
The goal of the system is to provide a timely and
accurate detection of red and green traffic lights,
which will be robust even under adverse
illumination or weather conditions.
The proposed system is based on the CIE-
L*a*b* color space (Illumination, 1978) exploiting
the fact that the perceptually uniform a* coefficient
is a color opponency channel between red (positive
values) and green (negative values). Therefore, it is
suitable for distinction between the two prominent
classes of TLs. An image processing phase
comprising 4-connected neighborhood image flood-
filling on the positive values of a* channel is then
applied, to ensure that red traffic lights will appear
as filled circles and not as black circles with a light
background. The fast radial transform is then
utilized to detect symmetrical areas in a*. The
proposed system has been tested in various
conditions and has been qualitatively and
quantitatively assessed, producing very promising
results.
The rest of the paper is organised as follows:
Section 2 presents an overview of the proposed
system, describing in depth every module and its
functionalities. Section 3 presents experimental
results in both normal and adverse conditions, and
finally, section 4 discusses the conclusions drawn
from the experiments and suggests future work.
2 PROPOSED SYSTEM
The hardware setup for the proposed system is
similar to most of the related applications. The core
of the system is a monocular camera mounted on an
elevated position on the windshield of the moving
vehicle. The video frames shot by the camera are
processed by three cascade modules. The first one is
the pre-processing module, with a goal to produce
images in which red TLs will appear as very bright
circular blobs and green TLs will appear as very
dark circular blobs. The image obtained by the pre-
processing module is used in the traffic light
detector, which comprises a FRS transform for
various radii, followed by a detection of multiple
local maxima and minima in the top part of the
frame. The last module applies a spatiotemporal
persistency verification step to keep those candidates
that appear in multiple frames, thus minimizing false
positives.
Summing up, the proposed algorithm consists of
the following steps:
1) Frame acquisition.
2) Image pre-processing:
a) Convert RGB to L*a*b*.
b) Enhance red and green color difference.
c) Fill holes in enhanced image
3) TL candidate detection:
a) Radial symmetry detection.
b) Maxima/minima localization.
TRAFFIC LIGHTS DETECTION IN ADVERSE CONDITIONS USING COLOR, SYMMETRY AND
SPATIOTEMPORAL INFORMATION
621
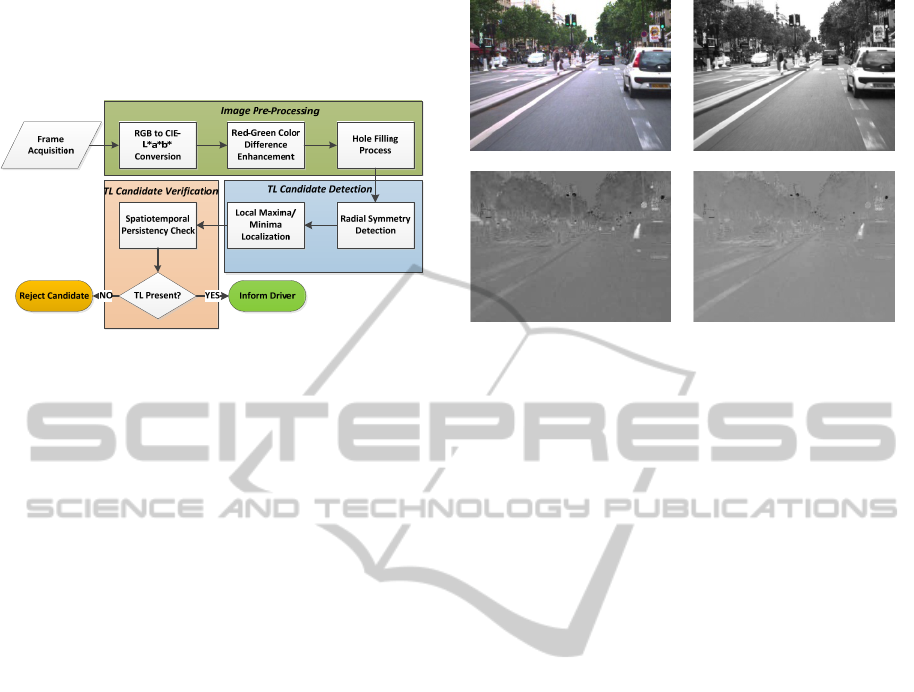
4) TL candidate verification:
a) Spatiotemporal persistency check.
The steps described above are shown in Figure 1.
Figure 1: Proposed TL detection algorithm.
2.1 Pre-processing Module
Before processing each frame to detect TL
candidates, the contrast between red and green lights
and their circularity are enhanced. Ideally, red TLs
should be very bright circular blobs and green TLs
should be very dark circular blobs. In this direction,
the perceptually uniform a* channel of the CIE-
L*a*b* color space, which assigns large positive
and negative values to red and green pixels
respectively, is utilized. To further enhance the
discrimination between red and green, the pixel
values of the a* channel are multiplied by the pixel
luminosity (L channel), to produce a new channel,
called RG hereafter, defined as
(, ) (, ) (, )RGxy Lxy axy=×
, (1)
where x, y are the pixel coordinates.
This transformation results in a further increase
of the absolute value of the pixels belonging to TLs,
as they also tend to have large luminosity values. On
the other hand, green objects with very large
absolute values of a* like tree leafs, do not appear so
bright, so they are not affected on the same degree.
The same applies for most red objects, like red roofs.
The aforementioned process is demonstrated in
Figure 2. While the green TLs are still dark when
multiplying L by a* (Figure 2d), the leafs are not as
dark as in the a* channel (Figure 2c).
Ideally, the image transformation from the RGB
to the CIE-L*a*b* color space would be enough to
achieve the aforementioned goal. However, real
world video sequences containing TLs often produce
a “blooming effect”, especially in the case of red
TLs, as shown in Figure 3a. The cause of this
blooming effect can be twofold: i) red lights often
include some orange in their hue, while green TLs
(a) (b)
(c) (d)
Figure 2: Red-green discrimination enhancement. (a) RGB
image, (b) L channel, (c) a* channel, (d) L, a*
multiplication result (RG channel).
include some blue. ii) The dynamic range of cameras
may be sensitive to very bright lights; consequently
saturated regions appear in their inner area.
To tackle this problem, we propose to combine
the red and green areas with the yellow and blue
ones, respectively. This is accomplished by
calculating the product of L and b* (YB channel):
(, ) (, ) (, )YB x y L x y b x y=×
(2)
where x, y are the pixel coordinates and then adding
the result to the RG channel to produce the RGYB
image:
()
(, ) (, ) (, )
(, ) (, ) (, ).
RGYBxy RGxy YBxy
Lxy axy bxy
=+
=× +
(3)
The results of this process are demonstrated in
Figure 3. The “blooming effect” is shown in the red
TL on the right of the picture in Figure 3b. While it
would be expected that the value of a* to be
positive, it appears to be negative (green). The
redness is observed only in the perimeter of the TL
and could lead the FRS algorithm to detect two
symmetrical shapes with the same centre (a large
bright one and a smaller dark one). However, by
adding the YB channel (Figure 3c) to the RG result,
this problem is handled, as shown in Figure 3d.
The blooming effect, however, still remains a
problem in the case of night driving, so an additional
step is necessary. This step is a grayscale 4-
connected neighbourhood image filling (Soille,
1999) of the holes in both the bright and the dark
areas of the image. More specifically, the RGYB
image is thresholded to produce two images: one
with red and yellow pixels (RGYB > 0) and one
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
622

(a) (b)
(c) (d)
Figure 3: Handling the “blooming effect” in the morning.
(a) RGB image, (b) RG channel, (c) YB channel, (d)
RGYB channel.
with green and blue pixels (RGYB < 0). The holes in
both images are then filled, using the method
mentioned above, and then they are added to
produce the final result. This process and its results
(denoted by the red ellipses) are demonstrated in
Figure 4. The green TLs in the scene are shown as
big black circles with a concentric smaller, lighter
circle inside them (Figure 4b). This effect has been
eliminated after the aforementioned filling process,
as shown in Figure 4c.
(a) (b)
(c)
Figure 4: Handling the “blooming effect” at night. (a)
RGB image, (b) RGYB channel, (c) RGYB channel after
filling process.
2.2 Radial Symmetry Detection
The algorithm for FRS detection was first introduced
by (Loy and Zelinsky, 2002) and improved in (Loy
and Zelinsky, 2003). Its main feature is detecting
symmetrical blobs in an image, producing local
maxima in the centres of bright blobs and local
minima in the centres of dark blobs. The only
parameters that have to be defined for this process
are a radial strictness factor, a, and the radii that will
be detected.
As mentioned in section 2.1, the image
transformed by the FRS algorithm includes red and
green color opponency. This property makes it
appropriate for the FRS transform. Some examples
of the implementation of the FRS transform (for
radii from 2 to 10 pixels with a step of 2 and a=3) to
pre-processed frames of various videos are reported
in Figure 5.
Figure 5: Fast radial symmetry transforms (right column),
at day and night time (left column). Dark spots denote
green TLs, light spots denote red TLs. Local
maxima/minima detection is performed above the yellow
line (which depends on the camera placement).
The results of the FRS transform that are
demonstrated in Figure 5 show that the centres of
TLs are always within the most voted pixels of the
frame, as long as their radii are included in the
search. This means that once the FRS algorithm has
been applied, the following process is a non-maxima
suppression to detect red TLs and a non-minima
suppression to detect green TLs. However, since the
nature of the TL detection problem allows it, only
the conspicuous region of the image, i.e. the upper
part, will be used for the suppression. Since the on-
board camera was not placed identically in all the
videos used, the selection of the part of the image
that will be used for the suppression must be defined
during the system calibration. This could be
achieved automatically using horizon detection
techniques, but this is not necessary because the
areas where a TL could appear can be predicted
during the camera setup. In the examples of Figure
5, the suppression took place above the yellow line.
Up to 5 local maxima and 5 local minima are
selected, given that they lie within the range of
numbers greater than half the value of the global
maximum. Once the TL candidates are produced, the
TRAFFIC LIGHTS DETECTION IN ADVERSE CONDITIONS USING COLOR, SYMMETRY AND
SPATIOTEMPORAL INFORMATION
623

TL areas are denoted by a rectangle with coordinates
that are determined by the detected centre
coordinates, the radius and the color of the TL. More
specifically, the annotation rectangle for a green TL
starts at 6 radii up and 1.5 radii to the left of the TL
centre and has a width of 3 radii and a height of 7.5
radii. Similarly, the annotation rectangle for a red
TL starts at 1.5 radii up and 1.5 radii to the left of
the TL centre and has the same height and width as
above.
2.3 Candidate Verification
The last module of the proposed system is a TL
candidate verification process. This step is vital for
the minimization of false positives that could be
caused by numerous artefacts that resemble a TL.
Road signs, advertisements etc. can be
misinterpreted as TLs, because their shape and color
properties might look alike. However, such artefacts
usually don’t appear radially symmetrical for more
than a few frames, while the symmetry and color of
TLs are more robust to temporal scale variations.
Hence, most of them can be easily removed if the
condition of multiple appearance of a TL in
successive frames is met.
In order to satisfy spatiotemporal persistency, the
proposed method assumes that a TL will appear in
the top voted candidates for symmetrical regions in a
sequence of frames (temporal persistency), so its
centre is expected to leave a track of pixels not far
from each other (spatial persistency). Such a result is
shown in Figure 6, where the trails left by the
centres of two green TLs over a period of 30 frames
are denoted by green dots. The sparse dots on the
left belong to the other detected symmetrical objects
and do not fulfil the persistency criterion.
Figure 6: Trails left by the centres of two green TLs.
A persistent high FRS value in a small area for at
least 3 out of 4 consecutive frames is the post-
processing criterion for characterizing a pixel as
being the centre of a TL. An example of the
aforementioned process is demonstrated in Figure 7,
where the first column shows frames 1, and 2 and
the second column contains frames 3, and 4. The red
rectangles denote a red TL candidate and the yellow
ones denote a green TL candidate.
Figure 7: Four consecutive frames, TL candidates
annotated by rectangles. Non persistent candidates are
dismissed. Candidates persistent for 3 out of 4 consecutive
frames get verified.
3 EXPERIMENTAL RESULTS
The assessment of the effectiveness of the proposed
system is twofold.
First, a quantitative assessment is made, using
the publicly available, manually annotated video
sequence of (Robotics Centre of Mines ParisTech,
2010). The video sequence comprises 11179 frames
(8min 49sec) of 8-bit RGB color video, with a size
of 640x480 pixels. The video is filmed in a C3
vehicle, travelling at speeds less than 50km/h, and
the camera sensor is a Marling F-046C, with a frame
rate of 25fps and a 12mm lens, mounted behind the
rear-view mirror of the car.
Secondly, extensive qualitative testing is carried
out, using video sequences of different resolutions
shot with different cameras, under adverse
conditions in day and night time, in various
countries, downloaded off the internet (mainly from
the YouTube site), or 720x576 pixels videos at 25fps
filmed in Greek roads, using a Panasonic NV-GS180
video camera. The purpose of this experimental
procedure is to examine the system’s robustness in
changing not only the driving, weather and
illumination conditions, but also the quality of the
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
624
videos and the camera setup.
The proposed system was implemented in
Matlab and was tested on a computer with a Core 2
Quad CPU at 2.83GHz, and 4GB of memory. The
code did not use any parallelization. The processing
times achieved were directly affected by the
resolution of the videos and they fluctuated from
0.1ms to 0.5ms per frame.
As far as the parameters used for the proposed
algorithm are concerned, the radii for the FRS in the
experiments were 2,4,6,8, and 10 pixels. The radial
strictness was 3, and for the spatiotemporal
persistency to hold, a candidate must appear in at
least three out of four consecutive frames, in an area
of a radius of 20 pixels.
3.1 Quantitative Results
The quantitative results of the TL detector are
estimated following the instructions given in
(Robotics Centre of Mines ParisTech, 2010), for
their publicly available, manually annotated video
sequence. These instructions stated that from the
11179 frames included in the video sequence, only
9168 contain at least one TL. However, not all the
TLs appearing in these frames are used: yellow
lights (58 instances) are excluded, as well as many
lights which are ambiguous due to heavy motion
(449 instances). Apart from these, 745 TLs that are
not entirely visible, i.e. are partially outside the
frame, are also excluded. Eliminating all these TL
instances, a total of 7916 visible and unambiguous
red or green TLs remain. The total distinct TLs that
comprise these 7916 instances are 32.
The results scored by the proposed system are
shown calculated following the same rule as (de
Charette and Nashashibi, 2009a), which states that if
a TL is detected and recognized once in the series of
frames where it appears, then it is classified as a true
positive. Hence, a false negative result is a TL never
detected in its timeline. Using these definitions, the
proposed algorithm scores a detection rate (recall) of
93.75%, detecting 30 of the total 32 TLs. The 2
missed traffic lights were green and appeared for 49
and 167 frames in the scene. In both cases, our
system detected the other green lights appearing in
the same scene, so the goal of informing the driver
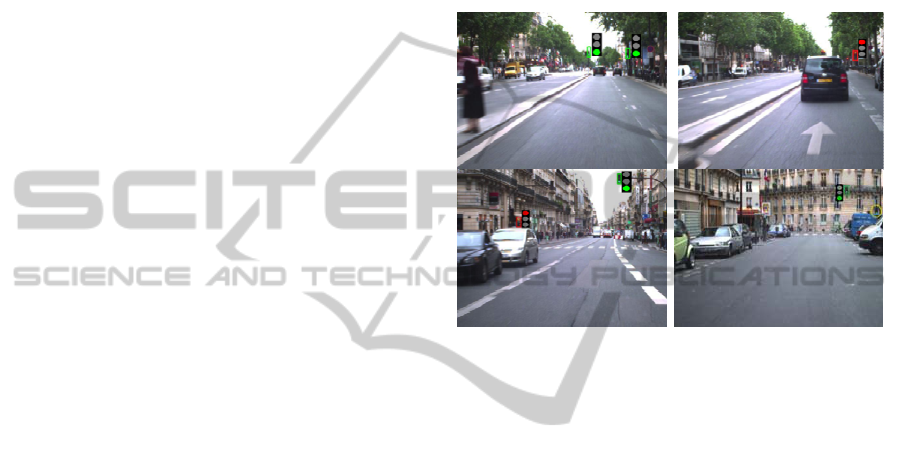
can be achieved. Some detection examples from the
aforementioned database are given in Figure 8. The
total number of false positive detections is 1481, of
which 1167 are false red TL positives and 314 false
green TL detections. The red false positive instances
concern 12 different objects mistaken as red TLs,
while the number of different objects mistaken as
green TLs is 7. This means that the precision of our
system is 61.22%. This false positive rate could be
significantly reduced by using morphological cues,
like the templates utilized by (de Charette and
Nashashibi, 2009a) and (de Charette and Nashashibi,
2009b), who report precision and recall rates of up
to 98% and 97% using temporal matching. A more
direct comparison between our system and the two
aforementioned approaches is not feasible though,
due to the lack of details in the evaluation process.
Figure 8: TL detection results in daytime driving. A false
positive red TL example is show in in the bottom left
image and a false negative is shown in the bottom right.
3.2 Qualitative Results
The experimental results reported in section 3.1
show that the system appears effective and robust in
the case of urban driving in good weather and
illumination conditions. The problem of false
positives is not so persistent and could be further
improved if, as already mentioned, a TL model is
used for a final verification, or if a color constancy
module is introduced. However, the great challenge
of such systems resides in more demanding driving
conditions, including driving under rainy conditions
and driving at night time.
For this reason the proposed system is also tested
in such conditions, so that its robustness and
resilience can be examined. Various video sequences
shot from on-board cameras all around the world
have been gathered from the Internet. The ultimate
goal is to construct a database of challenging
conditions driving videos, which will be annotated
and freely distributed in the future.
3.2.1 Driving Under Rainy Conditions
The first challenging case in ADAS is driving in
rainy conditions. The difficulty present is that
TRAFFIC LIGHTS DETECTION IN ADVERSE CONDITIONS USING COLOR, SYMMETRY AND
SPATIOTEMPORAL INFORMATION
625

raindrops on the windshield often distort the driving
scene and could cause the various objects to appear
disfigured. Another problem in rainy conditions is
the partial obstruction by the windshield wiper in
various frames. For these reasons, every vision
based system should be tested under rainy
conditions, as the results produced may vary a lot
from the ones achieved in normal weather. Some
examples of successful TL detections in rainy
conditions are shown in Figure 9.
Figure 9: Successful TL detection results in rainy
conditions.
The presence of a TL for the predefined number
of frames is annotated by the inclusion of a manually
drawn TL template next to the detected TL. Some
false positive examples are annotated, but have not
appeared in previous frames, i.e. the green rectangle
in the last image on the left column of Figure 9. The
false negatives in the same picture (green TL on the
top) and in the first picture of the right column of
Figure 9 (green TL on the right) have not reached 5
consecutive detections yet and are recognised in a
later frame.
3.2.2 Driving at Night
The second important category of adverse driving
conditions is night driving. The difficulty of the
situation relies largely on the environment and the
mean luminosity of the scene. If the environment
does not include excessive noise like for example
dense advertisements or other lighting sources, the
proposed system performs well, even in urban
driving situations. Successful detections in night
driving scenarios are presented in Figure 10. Most
TLs are successfully detected, even when their glow
makes it very difficult to distinguish shape and
morphology cues.
Figure 10: TL detection results in urban night driving.
3.2.3 Known Limitations of the TLD
A very common question when dealing with
computer vision applications is whether there are
problems that they cannot solve. The proposed
method is by no means flawless and can produce
persistent errors in some situations. The main
problems that can be pinpointed are the following:
i) The system produces some false positive results
that cannot be easily excluded, unless it is used in
correlation to other computer vision modules like a
vehicle detector or a road detector. An example of
such false positives is illuminated vehicle tail lights,
or turn lights, as in Figure 11a. This image also
includes a false positive result that is excluded in
next frames. ii) The proposed system fails
completely in cities like New York (Figure 11b),
where the visual information is extremely dense and
the TLs are lost in the background.
(a) (b)
Figure 11: Examples of temporary or permanent failures
of the proposed system.
4 CONCLUSIONS
In this paper, we have proposed a novel automatic
algorithm for traffic lights detection using a
monocular on-board camera. The algorithm uses
VISAPP 2012 - International Conference on Computer Vision Theory and Applications
626

color, symmetry and spatiotemporal information to
detect red and green traffic lights in a fashion
resilient to weather, illumination, camera setup and
time of day. It utilizes a CIE-L*a*b* based color
space with a holes filling process to enhance the
seperability of red and green traffic lights. A fast
radial symmetry transform is then used to detect the
most symmetrical red and green regions of the upper
part of the image, producing the TL candidates.
Finally, a spatiotemporal persistency criterion is
applied, to exclude many false positive results. The
algorithm has been experimentally assessed in many
different scenarios and conditions, producing very
high detection rates, even in very adverse conditions.
Future work will be directed towards embedding
a tracking module to the algorithm to minimize the
false negative results and a color consistency module
to further reduce false positives. Furthermore, the
combination of the TL detector with other ADAS
modules like vehicle, sign and road detection will be
explored, so that a complete solution for driver
assistance is proposed.
REFERENCES
Barnes, N., & Zelinsky, A. (2004). Real-time radial
symmetry for speed sign detection (pp. 566–571).
Presented at the 2004 IEEE Intelligent Vehicles
Symposium, IEEE.
doi: 10.1109/IVS.2004.1336446
Barnes, N., Zelinsky, A., & Fletcher, L. S. (2008). Real-
time speed sign detection using the radial symmetry
detector. Intelligent Transportation Systems, IEEE
Transactions on, 9(2), 322–332.
Chunhe Yu, Chuan Huang, & Yao Lang. (2010). Traffic
light detection during day and night conditions by a
camera (pp. 821-824). Presented at the 2010 IEEE
10th International Conference on Signal Processing
(ICSP), IEEE. doi:10.1109/ICOSP.2010.5655934
de Charette, R., & Nashashibi, F. (2009a). Real time
visual traffic lights recognition based on Spot Light
Detection and adaptive traffic lights templates (pp.
358-363). Presented at the 2009 IEEE Intelligent
Vehicles Symposium, IEEE. doi:10.1109/IVS.
2009.5164304
de Charette, R., & Nashashibi, F. (2009b). Traffic light
recognition using image processing compared to
learning processes (pp. 333-338). Presented at the
IEEE/RSJ International Conference on Intelligent
Robots and Systems, 2009. IROS 2009, IEEE.
doi:10.1109/IROS.2009.5353941
Illumination, I. C. on. (1978). Recommendations on
uniform color spaces, color-difference equations,
psychometric color terms. Bureau central de la CIE.
In-Hak, J., Seong-Ik, C., & Tae-Hyun, H. (2006).
Detection of Traffic Lights for Vision-Based Car.
Traffic, 4319/2006, 682-691. doi:10.1007/
11949534_68
Lindner, F., Kressel, U., & Kaelberer, S. (2004). Robust
recognition of traffic signals (pp. 49- 53). Presented at
the 2004 IEEE Intelligent Vehicles Symposium, IEEE.
doi:10.1109/IVS.2004.1336354
Loy, G., & Zelinsky, A. (2002). A fast radial symmetry
transform for detecting points of interest. Computer
Vision—ECCV 2002, 358–368.
Loy, G., & Zelinsky, A. (2003). Fast radial symmetry for
detecting points of interest. IEEE Transactions on
Pattern Analysis and Machine Intelligence, 959–973.
Omachi, M., & Omachi, S. (2009). Traffic light detection
with color and edge information (pp. 284-287).
Presented at the 2nd IEEE International Conference on
Computer Science and Information Technology, 2009.
ICCSIT 2009, IEEE. doi:10.1109/ICCSIT.2009.
5234518
Robotics Centre of Mines ParisTech. (2010, May 1).
Traffic Lights Recognition (TLR) public benchmarks
[La Route Automatisée]. Retrieved October 6, 2011,
from http://www.lara.prd.fr/benchmarks/trafficlights
recognition
Siogkas, G. K., & Dermatas, E. S. (2006). Detection,
Tracking and Classification of Road Signs in Adverse
Conditions (pp. 537-540). Presented at the IEEE
Mediterranean Electrotechnical Conference,
MELECON 2006, Malaga, Spain.
doi:10.1109/MELCON.2006.1653157
Soille, P. (1999). Morphological image analysis :
principles and applications with 12 tables. Berlin
[u.a.]: Springer.
Yehu Shen, Ozguner, U., Redmill, K., & Jilin Liu. (2009).
A robust video based traffic light detection algorithm
for intelligent vehicles (pp. 521-526). Presented at the
2009 IEEE Intelligent Vehicles Symposium, IEEE.
doi:10.1109/IVS.2009.5164332
TRAFFIC LIGHTS DETECTION IN ADVERSE CONDITIONS USING COLOR, SYMMETRY AND
SPATIOTEMPORAL INFORMATION
627
