
LEARNING HIGH-LEVEL BEHAVIORS FROM
DEMONSTRATION THROUGH SEMANTIC NETWORKS
Benjamin Fonooni, Thomas Hellström and Lars-Erik Janlert
Department of Computing Science, Umeå University, SE 901 87, Umeå, Sweden
Keywords: Learning from Demonstration, High-Level Behaviors, Semantic Networks, Robot Learning.
Abstract: In this paper we present an approach for high-level behavior recognition and selection integrated with a
low-level controller to help the robot to learn new skills from demonstrations. By means of Semantic
Network as the core of the method, the robot gains the ability to model the world with concepts and relate
them to low-level sensory-motor states. We also show how the generalization ability of Semantic Networks
can be used to extend learned skills to new situations.
1 INTRODUCTION
Learning from Demonstration (LfD) is a technique
to teach robots new behaviors by having a human or
robot teacher performing sequences of actions that
are either observed or perceived by the robot.
Several algorithms have been proposed. Most of
them distinguish between low and high-level
representations of a behavior (see for instance
Billard et al., 2008). In our approach, the low-level
is represented by sensory-motor mappings and the
high-level by combinations of concepts represented
in Semantic Networks.
One of the hard problems in LfD is how to
generalize a demonstrated behavior such that it can
be performed also in new, previously unseen
situations. This issue exists from both high and low-
level perspectives and there are several ways to
approach it (Nehaniv and Dautenhahn, 2000; Byrne
and Russon, 1998). The purpose of this paper is to
introduce a technique that integrates high and low-
level learning and control in a way that supports
generalization. A high-level controller deals with
concepts represented and processed in Semantic
Networks (SN). This controller is interfaced to a
low-level controller that learns and performs
behaviors defined at the sensory-motor level. The
glue, interfacing the two levels, is learned contexts,
describing the necessary high-level conditions for a
low-level behavior to be performed.
Behavioral studies of animals and humans
provide several sources for ideas on how low and
high-level learning may be combined. For instance,
Goal emulation (Whiten and Ham, 1992) is
interesting for learning how to direct focus of
attention towards favorable goals. Stimulus
enhancement is the implicit memory effect when
stimuli in the environment bias the agent’s behavior
towards receiving similar stimuli in the future.
Response facilitation is a mechanism that describes
how motor responses already in the repertoire be
repeated after observing the performance of the
same action (Kopp and Graeser, 2006). In a broad
sense, the work presented in this paper may be seen
as a realization of response facilitation. All
mechanisms described above may be seen as
examples of priming, aiming at guiding animal
behavior and learning (Byrne, 1994).
In section 2, the proposed architecture with its
major units is described. Section 3 is an overview on
Semantic Networks and its features. Section 4
elaborates the learning and performing phases based
on proposed architecture and Semantic Networks. In
section 5, an example is shown to evaluate learning
and performing phases.
2 OVERVIEW OF THE
ARCHITECTURE
A number of architectures and frameworks for LfD
have been developed during passed years which
influenced the current research in this field (Kasper
et al., 2001; Nicolescu, 2003). These works are
419
Fonooni B., Hellström T. and Janlert L..
LEARNING HIGH-LEVEL BEHAVIORS FROM DEMONSTRATION THROUGH SEMANTIC NETWORKS.
DOI: 10.5220/0003834304190426
In Proceedings of the 4th International Conference on Agents and Artificial Intelligence (ICAART-2012), pages 419-426
ISBN: 978-989-8425-95-9
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)
introducing architectures for learning low-level
sensory-motor behaviors. The purpose of designing
a new architecture is to interface the low-level
behavior learning and control which introduces an
integration and behavior arbitration techniques by
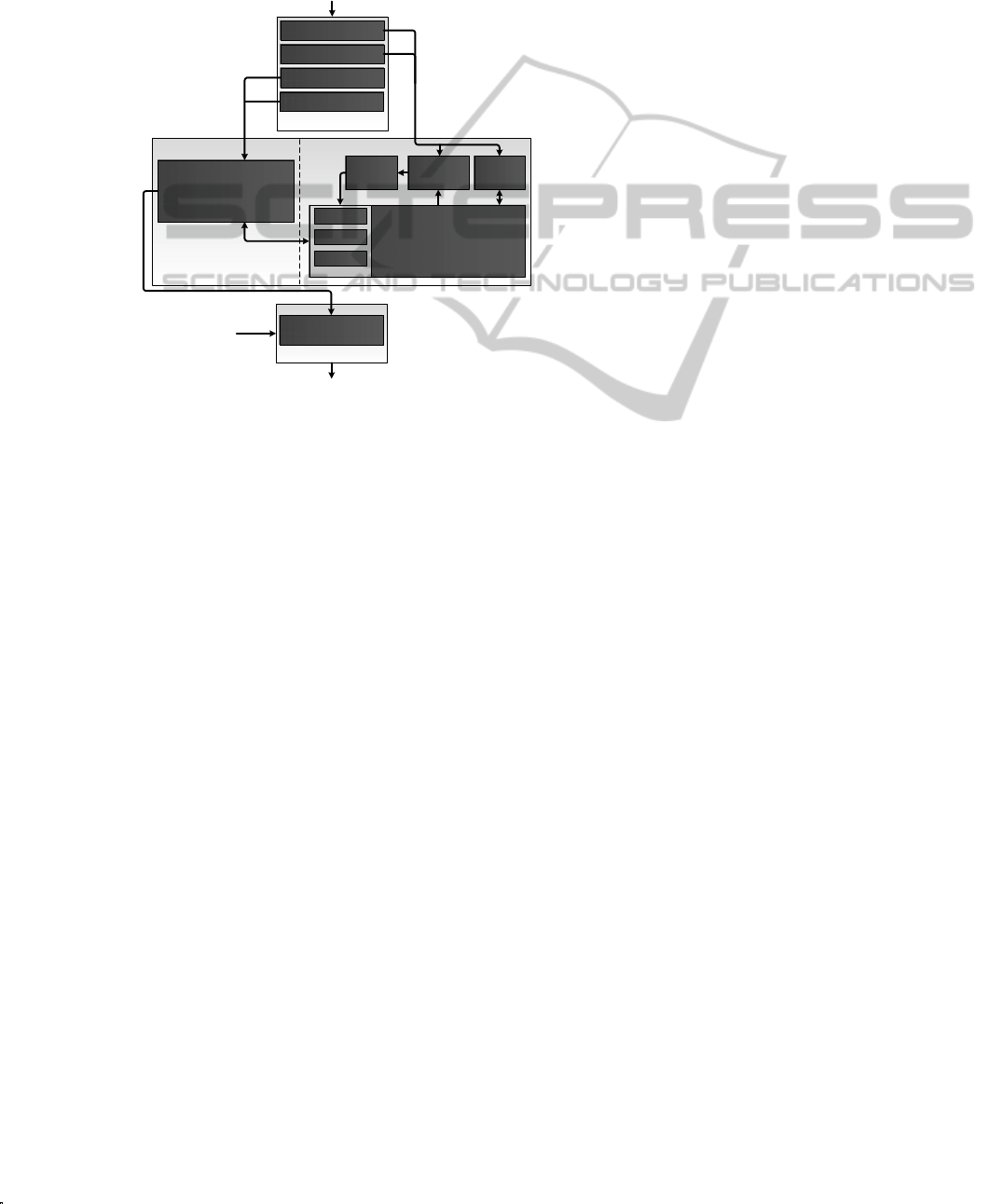
means of high-level control. Figure 1 depicts the
proposed architecture. The major units are described
below.
Figure 1: Proposed architecture.
2.1 Perception Unit
This unit collects and pre-processes sensor data from
the environment. In our experimental set-up, the
robot is equipped with laser scanner, ultrasonic
transducers, infra red sensors and an RFID reader
that acts as a high-level sensor which delivers
identity (and to some extent position) of places,
objects and people equipped with RFID tags. Every
tag is associated with a number of properties defined
in a database. The RFID technique is commonly
used in robotics to get reliable performance and
human-robot interaction (Nguyen et al., 2009), and
should be considered as a complement to other high-
level sensors like face recognizers, emotion
detectors, gesture recognizers or any other visual
inputs, and not a replacement.
2.2 Cognition Unit
The Cognition Unit is responsible for all robot
decision making and action selection processes. It
contains representation of the robot’s cognitive state
and has functions to modify its internal states.
Due to the structural differences between low
and high-level information, the unit is organized in
two modules running simultaneously.
2.2.1 High-Level Controller
One of the main tasks for this module is to learn
contexts that are relevant for the execution of low-
level behaviors. The other task is to arbitrate the
low-level controller. The module relies on the
abilities of a Semantic Network with predefined
concepts and relations describing the environment.
In learning mode, high-level inputs from the
Perception unit update the SN such that contexts
associated with the demonstrated behaviors are
learned. In execution mode (performing phase), the
module supports the low-level controller by
activating the most relevant context(s) according to
the current environmental conditions. These contexts
act as bias in the activation of behaviors in the low-
level controller. Basically, the cognitive state of the
robot, represented in the Semantic Network, is
updated through perception and a behavior
recognition process, and acts as a cue for performing
a behavior.
2.2.2 Low-Level Controller
The low-level controller learns and executes
behaviors that are mappings of sensory-motor data
to low-level actions (Billing et al., 2010a; Billing
and Hellström, 2010b). In the presented work, the
technique for learning is Predictive Sequential
Learning (PSL) (Billing and Hellström, 2008). PSL
treats control as a prediction problem and decides
the next action based on the sequence on recent
sensory-motor events. This technique allows
learning of many types of complex behaviors, but
does only work as long as the recent sensory-motor
history contains all information necessary to select
an appropriate action. One way to overcome this
limitation is to define several contexts for PSL,
where each context acts as a bias for action
selection. In this way, actions that are less common
within the present context are inhibited and the risk
for selecting inappropriate actions is reduced.
2.3 Output Unit
This unit is designed to enable tele-operation of the
robot. In addition, execution of action selection
results coming from the Cognition unit into motor
commands will be performed here.
Motor Command
Generation
RFID
Low-Level Learning and
Action
Inpu
t
Visual Input
Spatial Info
Perception Unit
Output Unit
Motor Out
p
u
t
Semantic Networks
Cognition Unit
Behavior
Selection
Behavior
Recognition
Learning
Behavior A
Behavior B
Behavior C
.
.
.
Context
High-Level Controller
Low-Level Controller
Laser Scanner
Tele-operation
ICAART 2012 - International Conference on Agents and Artificial Intelligence
420

3 SEMANTIC NETWORKS
Semantic Networks are often used to represent
abstract knowledge in a human-like fashion. They
are common within artificial intelligence as well as
in philosophy, psychology and linguistics (Bagchi et
al., 2000; Brown and Cocking, 2000; Rodriguez,
2008). In robotics, Semantic Networks is used for
concept forming and situational awareness
(Coradeschi and Saffiotti, 2003). The structured way
of representing knowledge can in combination with
visualization tools (Hartley and Barnden, 1997) help
humans to understand the internal state of the robot
and what is happening in the robot's cognitive
system. This may for instance help a tutor to put the
robot back on track when it is distracted during
learning or performing phases.
In our usage of Semantic Networks, high-level
concepts such as perceived object types and
properties are represented as nodes while relations
between concepts are represented as links. The
initial SN is pre-defined and comprises nodes that
are connected to the perception unit. These nodes are
activated through perception.
3.1 Generalization Ability
A common reason for using a Semantic Network as
a model of the environment is its ability to
generalize (Mugnier, 1995), (Vashchenko, 1977). In
our case, after a demonstration in LfD, the robot will
be able to extend the learned context to other,
related, contexts. Assume for instance that the robot
learns how to clean the table if there are empty cups
on it. By generalizing the cup concept to all the
drinkwares, it will also perform the cleaning
behavior when perceiving a mug on the table.
3.2 Interfacing to Low-level
Information
The success of robots designed to learn and work in
daily environments with humans, relies on wrapping
sensory-motor information with high-level concepts.
This can improve human-robot interaction by
utilizing Semantic Networks (Galindo et al., 2005).
As mentioned earlier in section 2.2.2, contexts which
are activated by the Semantic Network, give
meaning to low-level information and act as a bias to
choose suitable behaviors.
3.3 Spreading and Decaying Activation
In the proposed approach, each node has an
activation level. Spreading is a mechanism by which
activation spreads from one node to another in
proportion to the strength of their connection.
Decaying is a mechanism by which the activation
levels of nodes gradually decrease over time. These
processes have been implemented in a variety of
ways to solve different problems in modeling,
learning and robotics (Bagchi et al., 2000; Brown
and Cocking, 2000). The spreading activation model
used in this work, is based on mechanisms of human
memory operations that originates from
psychological studies (Rumelhart and Norman,
1983) and was first introduced in computing science
in the area of artificial intelligence to provide a
processing framework for Semantic Networks
(Crestani, 1997). In order to make spreading
activation work properly, we made following
assumptions:
• Activation spreads in parallel, to all links
leading out from a node
• Activation at a node is divided among the
links that lead from it
• Activation decays rapidly without
stimulation from other nodes or inputs
• Each node has an energy parameter that
limits the number of link levels for
spreading
The degree of generalization depends on the
amount of energy available for propagation of
activations. Higher amounts allow spreading along
several links, which leads to higher connectivity of
nodes and increase generalization.
The connections between nodes have weight
values that limit the propagation of activation
through the network. Learning is used to modify the
connection weights and will be discussed in the next
section.
4 LEARNING AND
PERFORMING PHASES
One of the objectives of the research presented in
this paper is to develop mechanisms to identify high-
level contexts in a demonstration, and map each
context to a low-level behavior. The low-level
controller is assumed to contain learning capability
based on sensory-motor data, and an ability to
execute the behaviors on request. In section 4.1 we
describe how high-level contexts are learned
simultaneously with the low-level learning.
LEARNING HIGH-LEVEL BEHAVIORS FROM DEMONSTRATION THROUGH SEMANTIC NETWORKS
421

4.1 Learning Phase
Our learning approach is inspired by Novelty
Detection techniques which are commonly used to
detect new situations that did not occur during
training (Markou and Singh, 2003).
We assume that we already have a predefined
Semantic Network based on an ontology of the
domain in which the robot should operate. This
network is used to interface to the Perception unit
and to identify or activate related nodes through
spreading and decaying activation.
The learning process starts by generating a
History Network describing the normal state of the
world. The environment is observed by sampling the
high-level sensors at a given frequency. As
mentioned earlier, RFID tags are used for
simplifying object detection and identification. Each
readout gives object identities and properties that are
perceived in the environment. Each read tag causes
the corresponding nodes to be activated. For
instance, if the RFID belonging to a red ball is
detected, the nodes Red and Ball will be activated.
Throughout the learning process, activation levels
propagate to all connected nodes by spreading
activation.
Sometimes a node is activated and deactivated
due to noise and uncertainties in the RFID sensing.
Therefore, a decaying delay parameter is defined to
prevent instant deactivation of nodes after the
disappearance of correspondent object from the
environment.
Finally, the updated Semantic Network will be
saved as the History Network.
Now learning of a high-level context may start.
A context node with the name of the new behavior to
be learned is added to the network. This version of
the network is called Learning Network. The human
teacher then demonstrates the wanted behavior by
tele-operation. The RFID sensors perceive high-
level concepts, at the same time as sensory-motor
data is learned by the low-level controller. The
context node will be connected to nodes activated by
the RFID sensors. To finalize the learning process,
two issues must be solved. First, the most relevant
connections must be determined. Secondly, the
weights between the remaining nodes and the
context node must be computed. In order to identify
relevant connections, the algorithm looks for
significant differences between the History and
Learning Networks. An unpaired T-Test is used to
compare mean node activation for all nodes.
=
−
+
(1)
where
is mean activation of History Node x
is mean activation of Learning Node x
n
H
and n
L
are number of samples for History
and Learning respectively
t
x
tells whether the samples for the two nodes are
drawn from the same distribution or not. In other
words: did the node change significantly between
History and Learning phases. If it did not, the
connection between the node and the context node
should be removed. For instance, suppose ambient
light was always on, during both History and
Learning phases. In this case, the T-Test will
consider ambient light as irrelevant because of the
identical distribution in both phases.
After the elimination process of irrelevant
connections, weights (w
x
) for the remaining nodes
are calculated. This is done by the following
equation:
=
(2)
where N
x
is the number of samples for which node x
has activation value above 0 during the learning
phase, and P is the weighted sum for all nodes,
calculated as follows:
=
(3)
Finally, the learned context node will be associated
with the learned behavior representation in the low-
level controller module.
4.2 Performing Phase
In the performing phase, RFID sensors update their
corresponding network nodes. Whenever a node is
activated, all other linked nodes are activated
according to the spreading mechanism. In this way
previously learned context nodes may get activated,
thereby, guiding the low-level controller to execute
the behaviors. If two or more contexts have high
activation levels, several behaviors are possible, and
the final decision will be made by the low-level
controller. This can be viewed as high-level
behavior recognition and is performed by Behavior
Recognition module depicted in Figure 1. Due to the
pre-defined semantic relations in the semantic
network, the robot will be able to generalize the
demonstrated context to similar contexts. As
ICAART 2012 - International Conference on Agents and Artificial Intelligence
422

previously mentioned, the degree of generalization
can be controlled by the amount of energy (Huang et
al., 2006).
5 EXPERIMENTS
For better understanding of the whole approach, an
example is shown. Assume we are going to teach the
robot how to move a thing to the storage room. First,
the robot will start moving around by tele-operation
and collecting information regarding all the objects
and places by RFID tags. Due to the characteristics
of the described technique, the blue box should not
be present at this stage. Figure 2 depicts the robot's
perceptions that yield the History Network.
Figure 2: History network.
Learning will begin by placing the blue box
somewhere in the middle of the room and tele-
operating the robot towards the box. After grasping,
the teacher commands the robot to push the box and
guides it to the storage room that ends the learning
phase. Figure 3 depicts the learned Moving Object
behavior. Although we did not illustrate any low-
level learning, this is done simultaneously by the
low-level controller while tele-operating the robot.
The number of samplings for the history (N
H
) and
learning (N
L
) is 40 and 60 respectively. In order to
identify the nodes with the most significant changes,
the t-test is run and results are shown in Table 1.
Confidence Interval (CI) of the test is given by the t-
distribution with value set to 0.05. Degree of
Freedom (DF) is calculated as follows:
=
+
−2
(4)
According to equation 1,
will be computed and
nodes which fulfill condition 5 will be removed.
− ≤
≤
(5)
Finally, according to equation 2, weights for the
remaining nodes are calculated, shown in Table 1.
After finalizing the learning phase, the robot is able
to perform Moving Object action whenever it
perceives blue and box1 in the environment.
Figure 3: Learned network.
LEARNING HIGH-LEVEL BEHAVIORS FROM DEMONSTRATION THROUGH SEMANTIC NETWORKS
423
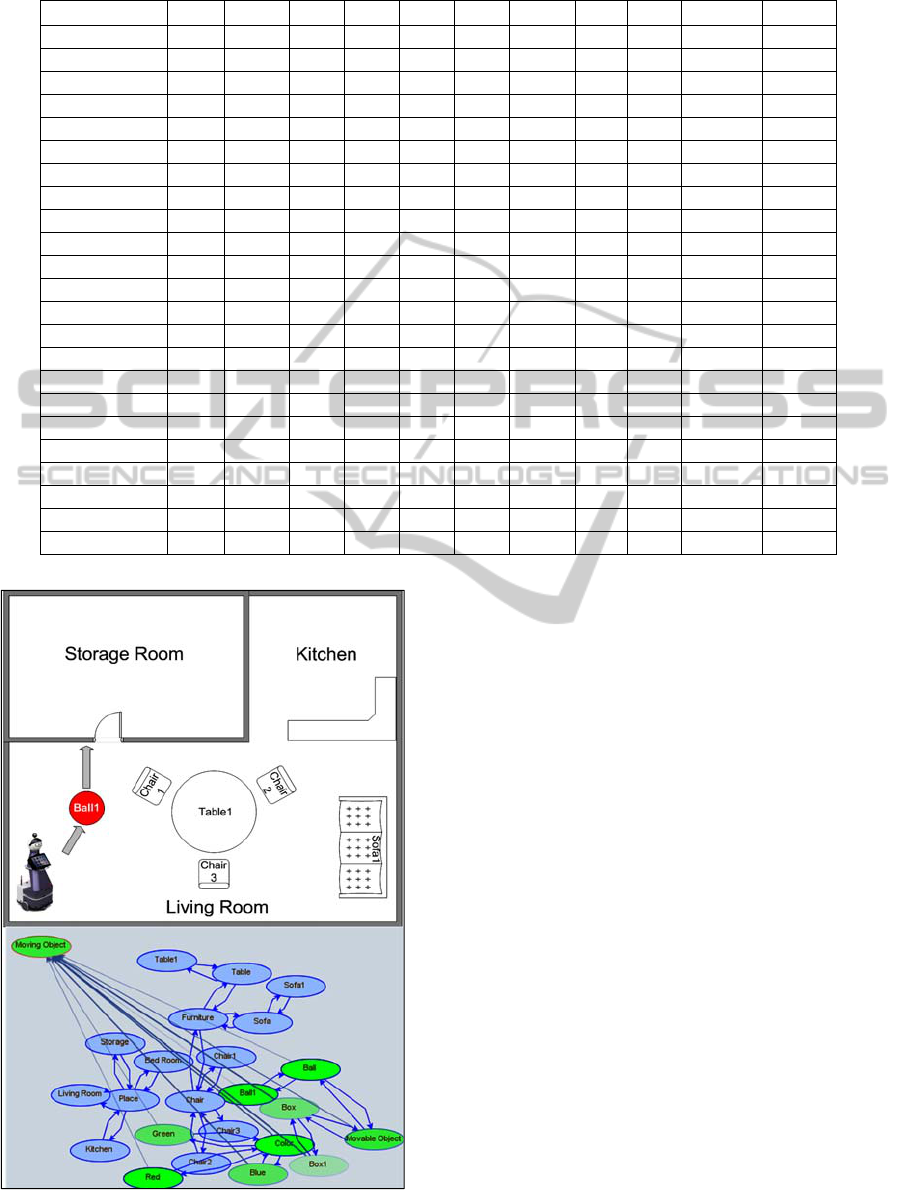
Table 1: History and learning values, T-Test results and weight values.
Node
DF CI
Living Room 1.51 0.56 36 1.65 0.37 58 -0.48 98 2.0 0% --
Sofa 1.82 1.2 28 2.24 0.94 51 -1.0 98 2.0 0% --
Table1 1.73 1.16 28 2.15 0.9 51 -1.03 98 2.0 0% --
Furniture 2.64 1.62 31 3.21 1.24 54 -0.96 98 2.0 0% --
Box 0.0 0.0 0 0.73 0.44 44 -6.52 58 2.02 19.74% 0.1974
Box1 0.0 0.0 0 0.73 0.44 44 -6.52 58 2.02 19.74% 0.1974
Bed Room 1.3 0.48 36 1.41 0.32 58 -0.48 98 2.0 0% --
Chair2 2.81 1.71 31 3.41 1.31 54 -0.95 98 2.0 0% --
Table 2.12 1.40 28 2.61 1.09 51 -1.0 98 2.0 0% --
Blue 0.0 0.0 0 0.66 0.47 40 -6.21 58 2.02 16.32% 0.1632
Chair1 2.26 1.40 31 2.76 1.07 54 -0.97 98 2.0 0% --
Kitchen 0.87 0.31 36 0.95 0.20 58 -0.46 98 2.0 0% --
Movable Obj. 0.0 0.0 0 0.36 0.22 44 -6.52 58 2.02 9.87% 0.0987
Green 0.0 0.0 0 0.21 0.15 39 -6.14 58 2.02 5.17% 0.0517
Chair3 3.21 1.89 31 3.87 1.43 54 -0.93 98 2.0 0% --
Sofa1 0.67 0.46 27 0.85 0.35 51 -1.09 98 2.0 0% --
Ball1 0.0 0.0 0 0.09 0.05 44 -6.52 58 2.02 2.47% 0.0247
Red 0.0 0.0 0 0.22 0.15 40 -6.21 58 2.02 5.44% 0.0544
Storage Room 1.97 0.69 36 2.14 0.43 58 -0.46 98 2.0 0% --
Ball 0.0 0.0 0 0.18 0.11 44 -6.52 58 2.02 4.94% 0.0494
Place 2.62 0.94 36 2.85 0.60 58 -0.46 98 2.0 0% --
Chair 3.65 2.13 31 4.39 1.61 54 -0.92 98 2.0 0% --
Color 0.0 0.0 0 0.66 0.47 40 -6.21 58 2.02 16.32% 0.1632
Figure 4: Performing phase.
The robot is not only capable of performing Moving
Object behavior by observing the same objects
during the learning phase, but can also generalize
objects and concepts in the new situations. In order
to test the system, the robot should recognize a red
ball and push it to the storage room. This example
clearly shows the generalization ability mentioned in
section 3.1. As can be seen in Figure 4, perceiving
red and ball1 instead of blue and box1, to some
degree, activates Moving Object context node
through direct links and other connections to the
Color and Movable Object nodes.
The activation level of the context node (
) is
calculated by equation 6:
=
(6)
n is the number of nodes which are currently
activated and connected to the context node. A
selection threshold should be defined for accepting
the selected behavior as a result of generalization. In
our example, we set the threshold to 0.6 meaning
that the result of equation 6 should be at least 60%
of the maximum value of the context node's
activation (
). The maximum value is
calculated during the learning phase by equation 6
and by replacing
with
(maximum
ICAART 2012 - International Conference on Agents and Artificial Intelligence
424

activation of node i). For this example,
equals 0.8214 and calculated
is 0.5246 which
passed our threshold with 63%. Therefore, red and
ball1 are also able to trigger Moving Object context
and cause the low-level controller to execute
corresponding sensory-motor commands.
6 CONCLUSION AND FUTURE
WORKS
In this paper we proposed an architecture to learn
and act at a conceptual level by means of Semantic
Networks. By introducing Semantic Networks and
their usage in some research projects, a possible
integration to LfD discussed. These aspects are
valuable in concept forming and provide support for
higher level cognitive activities such as behavior
recognition. This integration is useful not only for
LfD, but can be utilized in scaffolding,
reinforcement learning or any other supervised
learning algorithms. In this work, functionality of
the system is tested with limited objects in the
environment. In case of scaling up the number of
entities in the working ontology, generalization will
be more applicable.
Currently, our approach is incapable of handling
quantities and negations. In our future work, we are
going to define new link types in the Semantic
Networks and design the high-level control in a way
that can learn more complex scenarios.
ACKNOWLEDGEMENTS
This work has been financed by the EU funded
Initial Training Network (ITN) in the Marie-Curie
People Programme (FP7): INTRO (INTeractive
RObotics research network), grant agreement no.:
238486.
REFERENCES
Bagchi, S., Biswas, G., and Kawamura, K., 2000. Task
Planning under Uncertainty using a Spreading
Activation Network, IEEE Transactions on Systems,
Man and Cybernetics, Vol. 30, No. 6, pp. 639-650.
Billard, A., Calinon, S., Dillmann, R., and Schaal, S.,
2008. Robot programming by demonstration. In
Siciliano, B. and Khatib, O., editors, Handbook of
Robotics. Springer.
Billing, E. A., Hellström, T., and Janlert, L. E., 2010a.
Behavior Recognition for Learning from
Demonstration, Proceedings of IEEE International
Conference on Robotics and Automation, Alaska.
Billing, E. A., and Hellström, T., 2008. Behavior
Recognition for Segmentation of Demonstrated Tasks,
IEEE SMC International Conference on Distributed
Human-Machine Systems, pp. 228 – 234, Athens,
Greece.
Billing, E. A. and Hellström, T., 2010b. A Formalism for
Learning from Demonstration, Journal of Behavioral
Robotics, Vol. 1, pp. 1–13.
Brown, A. L., and Cocking, R. R., 2000. How people
Learn: Brain, Mind, Experience, and School:
Expanded Edition, John D. Branford, National
Academy Press.
Byrne R. W., Russon. A. E., 1998. Learning by imitation:
a hierarchical approach, The Journal of Behavioral
and Brain Sciences, Vol. 16.
Byrne, R. W., 1994. The evolution of intelligence. In
Behaviour and Evolution (ed. P. J. B. Slater and T. R.
Halliday), pp.223-265. Cambridge University Press.
Coradeschi, S., Saffiotti, A., 2003. An Introduction to
Anchoring Problem. Journal of Robotics and
Autonomous Systems. Vol. 43, pp. 85-96.
Crestani, F., 1997. Application of Spreading Activation
Techniques in Information Retrieval. Journal of
Artificial Intelligence Review. Vol. 11, pp. 453-482.
Galindo, C., Saffiotti, A., Coradeschi, S., Buschka, P.,
2005. Multi-Hierarchical Semantic Maps for Mobile
Robotics. In Proc. of the IEEE/RSJ Intl. Conf. on
Intelligent Robots and Systems. pp. 3492-3497.
Hartley, R. and Barnden, J., 1997. Trends in Cognitive
Science, Vol. 1, No. 5, elsevier Science ltd.
Huang, Q. Y., Su, J. S., Zeng, Y. Z., Wang, Y. J., 2006.
Spreading activation model for connectivity based
clustering. Advances in Information Systems. Vol.
4243/2006, pp. 398-407.
Kasper, M., Fricke, G., Steuernagel, K., Puttkamer, E. V.,
2001. A behavior-based mobile robot architecture for
Learning from Demonstration. Journal of Robotics and
Autonomous Systems. Vol. 34, pp. 153-164.
Kopp, S., Graeser, O., 2006. Imitation Learning and
Response Facilitation in Embodied Agents.
Proceedings of 6
th
International Conference on
Intelligent Virtual Agents, Marina Del Ray, CA, USA.
pp. 28-41.
Markou, M., Singh, S., 2003. Novelty Detection: A
Review – Part 1: Statistical Approaches. Journal of
Signal Processing. Vol. 83, Issue 12, pp. 2481-2497.
Mugnier, M. L., 1995. On Generalization / Specialization
for Conceptual Graphs. Journal of Experimental &
Theoretical Artificial Intelligence. Vol. 7, Issue 3, pp.
325-344.
Nehaniv C. L., Dautenhahn K., 2000. Of hummingbirds
and helicopters: An algebraic framework for
interdisciplinary studies of imitation and its
applications. Learning Robots: An Interdisciplinary
Approach. Vol. 24, pp. 136–161, World Scientific
Press.
Nguyen, H., Deyle, T., Reynolds M., and Kemp, C. C.,
2009. PPS-tags: Physical, Perceptual and Semantic
tags for autonomous mobile manipulation,
LEARNING HIGH-LEVEL BEHAVIORS FROM DEMONSTRATION THROUGH SEMANTIC NETWORKS
425

Proceedings of the IROS Workshop on Semantic
Perception for Mobile Manipulation.
Nicolescu, M. N., 2003. A framework for learning from
demonstration, generalization and practice in human-
robot domains. Doctoral Dissertation. University of
Southern California, Los Angeles, CA, USA.
Rodriguez, M. A., 2008. Grammar-Based Random
Walkers in Semantic Networks, Knowledge-Based
Systems, Vol. 21, pp. 727-739.
Rumelhart, D., Norman, D., 1983. Representation in
memory. Technical Report, Department of Psychology
and Institute of Cognitive Science, UCSD La Jolla,
USA.
Vashchenko, N. D., 1977. Concept Formation In a
Semantic Network. Cybernetics and System Analysis.
Vol. 19, No. 2, pp. 277-285.
Whiten, A., Ham, R., 1992. On the nature and evolution of
imitation in the animal kingdom: Reappraisal of a
century of research. Advances in the Study of
Behaviour, Vol. 21, pp. 239-283.
ICAART 2012 - International Conference on Agents and Artificial Intelligence
426
