
CHANNEL AND ACTIVE COMPONENT ABSTRACTIONS
FOR WSN PROGRAMMING
A Language Model with Operating System Support
Paul Harvey
1
, Alan Dearle
2
, Jonathan Lewis
2
and Joseph Sventek
1
1
School of Computing Science, University of Glasgow, Glasgow, Scotland, U.K.
2
School of Computer Science, University of St Andrews, St Andrews, Scotland, U.K.
Keywords:
Wireless Sensor Network, Insense, InceOS, nesC, TinyOS, Operating System, Programming Language.
Abstract:
To support the programming of Wireless Sensor Networks, a number of unconventional programming models
have evolved, in particular the event-based model. These models are non-intuitive to programmers due to the
introduction of unnecessary, non-intrinsic complexity. Component-based languages like Insense can eliminate
much of this unnecessary complexity via the use of active components and synchronous channels. However,
simply layering an Insense implementation over an existing event-based system, like TinyOS, while proving
efficacy, is insufficiently space and time efficient for production use. The design and implementation of a new
language-specific OS, InceOS, enables both space and time efficient programming of sensor networks using
component-based languages like Insense.
1 INTRODUCTION
Wireless sensor networks enable a wide variety of ac-
tivities to be performed autonomously, and are cur-
rently being used in many diverse areas including
measurements of mountain permafrost (Hasler et al.,
2008) and grapevines (Burrell et al., 2004). Such
networks take highly constrained hardware devices
(motes) and connect them via short-range radios to
form useful monitoring tools, protection systems, and
research systems. In programming such devices, a
number of unconventional programming models have
evolved. For example, both TinyOS (Hill et al., 2000)
and Contiki (Dunkels et al., 2004) use an event-driven
programming model, although realised through dif-
ferent abstractions. We assert that these models are
non-intuitive to programmers due to the introduction
of unnecessary non-intrinsic complexity. In partic-
ular, the introduction of the TinyOS split-phase ex-
ecution model is a barrier to understanding, writing
and reasoning about WSN programs. The same ar-
gument could also be levelled at programming with
TinyOS threads and Contiki proto-threads. However,
due to space limitations, we focus on the event-driven
TinyOS abstractions in this paper.
In this paper we describe a new language-specific
operating system, InceOS, which was created to sup-
port the domain-specific language (DSL) In-
sense (Dearle et al., 2008). Unlike the previous
Insense implementation on Contiki, InceOS is
tuned to the needs of Insense, enabling non-trivial
Insense application to fit onto real mote hardware
and execute in a timely manner. We hypothesise
that the component-based model and abstractions
presented by Insense, and implemented by InceOS,
support a simpler programming model for resource-
constrained embedded systems, removing much of
the complexity of an event-based system, while still
affording the user the power to express complex
applications. We demonstrate that applications
written using Insense, and running on InceOS both
fit onto and run efficiently on real mote hardware
with better performance when compared to TinyOS.
This is shown via a comparison of Insense and nesC
applications that cover different aspects of embedded
programming.
The paper is structured as follows: Section 2
gives an overview of event-driven programming and
TinyOS, Sections 3 and 4 discuss Insense and In-
ceOS, Section 5 presents the results of the compar-
ison between the languages and systems, Section 6
highlights directions for future work, and Section 7
provides concluding remarks.
35
Harvey P., Dearle A., Lewis J. and Sventek J..
CHANNEL AND ACTIVE COMPONENT ABSTRACTIONS FOR WSN PROGRAMMING - A Language Model with Operating System Support.
DOI: 10.5220/0003832500350044
In Proceedings of the 1st International Conference on Sensor Networks (SENSORNETS-2012), pages 35-44
ISBN: 978-989-8565-01-3
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

2 BACKGROUND
In order to place Insense and InceOS in context, we
describe the event-driven model and how it relates to
the computational model of TinyOS
1
. Event-driven
systems respond to events. These events can be gen-
erated by the hardware, for example by interrupts, or
by software. An event triggers an associated event
handler, which handles the event and results in some
computation being initiated that may, in turn, generate
further events.
In event-driven systems, there is no single locus
of execution; rather, there are a number of them each
triggered by an event. Such systems have become
popular for embedded systems since they do not re-
quire the same memory and processing overheads as
threads (e.g., for stacks and context switching), yet
provide a concurrent computational model. Another
advantage is that concurrency control is simplified
since, in many (single-CPU) systems, multiple event
handlers do not run simultaneously (Hill et al., 2000).
2.1 TinyOS
TinyOS is a component-based, event-driven system in
which events are signalled by both hardware and soft-
ware, and event handlers (callbacks) are expressed as
user-written functions that are invoked in response to
events. To support this event model, TinyOS appli-
cations are composed of components that are wired
together; a configuration is shown in Figure 1. Each
component contains state, effectively executes au-
tonomously, and presents and uses (procedural) inter-
faces. Interfaces are used to specify the events and
commands that a component should support.
configuration SenseAppC {}
implementation {
components SenseC, MainC, LedsC,
new TimerMilliC(),
new DemoSensorC() as Sensor;
SenseC.Boot -> MainC;
SenseC.Leds -> LedsC;
SenseC.Timer -> TimerMilliC;
SenseC.Read -> Sensor;
}
Figure 1: nesC SenseAppC configuration.
Each component contains command handlers (for
handling down-calls) and event handlers (for han-
dling up-calls). Commands are non-blocking requests
made to lower level components; a command will
1
Other event-based [e.g. Contiki] and component-based
[e.g. Lorien (Porter and Coulson, 2009)] systems exist;
space limitations prevent their inclusion in the discussion.
usually deposit parameters into the component’s lo-
cal state and post a task for later execution; it may
also invoke a lower level command. Event handlers
are intended to be small blocks of code that either in-
voke other event handlers, initiate split phase oper-
ations, call commands, or post tasks. Tasks, unlike
events, are schedulable, non-preemptable entities that
must run to completion.
#include "Timer.h"
module SenseC
{
uses {
interface Boot;
interface Leds;
interface Timer<TMilli>;
interface Read<uint16_t>;
}
}
implementation
{
// sampling frequency in binary milliseconds
#define SAMPLING_FREQUENCY 100
event void Boot.booted() {
call Timer.startPeriodic(SAMPLING_FREQUENCY);
}
event void Timer.fired() {
call Read.read();
}
event void Read.readDone(error_t result,
uint16_t data) {
if (result == SUCCESS){
if (data & 0x0004)
call Leds.led2On();
else
call Leds.led2Off();
if (data & 0x0002)
call Leds.led1On();
else
call Leds.led1Off();
if (data & 0x0001)
call Leds.led0On();
else
call Leds.led0Off();
}
}
}
Figure 2: nesC SenseC component.
TinyOS does not perform blocking operations;
instead it uses split-phase operations for long run-
ning executions. This methodology typically in-
volves initiating operations via a startOperation()
command, and completing an operation with an
operationDone() event handler. TinyOS and its ap-
plications are written in the nesC language (Gay et al.,
SENSORNETS 2012 - International Conference on Sensor Networks
36

2003), a component-based language that extends C.
The code fragment shown in Figure 1 describes the
(static) configuration of the Sense program (Hauer,
2006) which displays the battery status of a mote on
its LEDs. The configuration describes both the
components to be used and their interconnectivity.
The only user-supplied nesC component for this
program is shown in Figure 2. Execution starts when
an event is handled by Boot.booted(); it initiates a
periodic timer by calling Timer.startPeriodic()
before yielding control. At some later point in time, a
timer event is signalled to Timer.fired(); it initiates
a read of the battery sensor by calling Read.read()
before yielding control again. Finally, when the Read
component signals a Read.readDone() event, it is
handled and the LEDs switched accordingly.
We assert that the split-phase programming model
introduces unnecessary cognitive load on the readers
and writers of such programs. Note that even this,
relatively short, piece of code contains 2.5 split-phase
operations, obfuscating the flow of control.
3 INSENSE
Insense is a component-based language for WSN
programming that was previously implemented over
Contiki. The computational model presented by In-
sense is simple: applications are constructed as com-
positions of active components communicating over
strongly typed, directional, synchronous channels.
This model borrows from both the Actor (Hewitt
et al., 1973) and π-calculus (Milner et al., 1992) lan-
guage families. This computational model simplifies
three areas of programming: synchronisation, mem-
ory management, and event-driven programming.
3.1 Components
Insense components exhibit shared nothing seman-
tics: there are no global variables and a component’s
state may only be accessed from within the compo-
nent. Insense components may be dynamically in-
stantiated using one of the components’ constructors
in a manner familiar to Java or C++ programmers.
Each Insense component comprises three ele-
ments: a behaviour, one or more constructors and
an arbitrary number of interfaces. It may also con-
tain component local state and functions. A com-
ponent’s behaviour is akin to a void procedure that
is repeatedly executed upon component instantiation,
until explicitly terminated. Each behaviour runs as
an individual pre-emptible locus of control (similar
to a thread) and may access the component instance’s
state. Since there is only one locus of control per com-
ponent which can never leave the component in which
it was created, threads and component instances are
in 1:1 correspondence. This, coupled with all compo-
nent state being private, means that there is no need
for explicit synchronisation or other concurrency con-
trol primitives in the language.
3.2 Interfaces
Components present interfaces which comprise a
collection of typed, named, directional channels.
Synchronous sending of messages via channels is
the only inter-component communication mechanism
provided in the language. Figure 3 below shows an
Insense component definition that presents an inter-
face containing three channels named: ticker, battReq
and battVal. Two of these channels are input channels
meaning that values can be read from them, one is
an output channel to which data may be written. The
specification of a channel in a component interface
implicitly makes a declaration, introducing the chan-
nel name into the scope of the component body; thus
the names ticker, battReq and battVal are available for
use within the component.
3.3 Channels
Channels are typed and directional. In addition to be-
ing able to declare channels in component interfaces,
they may also be dynamically declared. Channels are
first class entities in Insense and may be passed down
appropriately typed channels. This technique may be
used to dynamically wire-up Insense programs. As
stated above, send and receive are synchronous op-
erations in Insense and implement a rendezvous in
which either the sender or the receiver will block un-
til the other is ready. The program in Figure 3 re-
ceives ticks from a ticker channel and makes requests
for data from the battery component.
Channels are connected using explicit connect
statements in the language. If a component attempts
to communicate over an unbound channel it will block
until a connection is established and data is available.
This mechanism is extremely powerful and facilitates
dynamic composition and evolution of components in
a live system. In the program in Figure 3, a newly
created instance of the sense component is explic-
itly connected to the (predefined) sensors component.
A disconnect operator is also provided although not
shown in this example. In addition to the send and re-
ceive operations shown here, Insense also provides a
powerful guarded, non-deterministic select statement
permitting data to be read from an arbitrary number
CHANNEL AND ACTIVE COMPONENT ABSTRACTIONS FOR WSN PROGRAMMING - A Language Model with
Operating System Support
37

of channels. Unlike nesC, connect statements may
be dynamic, permitting flexible, reconfigurable archi-
tectures. Insense channels may be used to wire up
components in arbitrary topologies. Thus an output
channel can be connected to multiple input channels
or vice versa. Whilst this makes channel implemen-
tation more complex, it increases the expressive ca-
pabilities of the language and permits complex archi-
tectural patterns to be expressed. It also introduces a
second source of non-determinism into the language.
3.4 Memory Management
Like Java, Insense provides the new keyword for dy-
namic memory allocation of arrays, structs, chan-
nels, and components; reference counted garbage
collection is used to restore unused memory to the
heap, thus removing the burden of memory manage-
ment from the programmer. An upper bound on the
(relatively-small) stack space required for each com-
ponent instance is calculated at compile time. This is
possible due to restrictions on recursive invocation of
functions and a simple computational model.
3.5 Event-driven Programming
The channel mechanism provides an excellent vehi-
cle for event-driven programming with events deliv-
ered via channels either from hardware devices or
other components. If required to do so, components
can be made to block awaiting delivery of events via
a receive statement. Typically a single component
will be connected to an event channel. However, mul-
tiple handlers can also be connected to a single event
channel providing the capability to process events in
parallel. This model is more expressive than those
of TinyOS, is no less efficient, and simpler to under-
stand.
3.6 SenseC in Insense
The code in Figure 3, shows a program equivalent to
the TinyOS SenseC application encoded in Insense.
The code defines and instantiates a single compo-
nent type called sense which presents an interface
ISense containing three channels as described above.
The component repeats its behaviour clause forever,
blocking every repetition until a tick is received from
the ticker channel. Once a tick is received, the battery
levels are requested by sending a message on the bat-
tReq channel before blocking awaiting a reply. The
final four statements represent the ”main” for the ap-
plication. They create the component, bind its chan-
nels to the sensors, and instantiate the ticker to de-
liver timer messages every 0.098 seconds; the value of
SAMPLING FREQUENCY in Figure 2 corresponds
to a timer event every 0.098 seconds due to TinyOSs
use of 1024 ticks per second. This program is shorter,
simpler and, easier to understand than the nesC equiv-
alent.
type ISense is
interface (in bool ticker; out bool battReq;
in integer battVal)
component sense presents ISense {
constructor() {}
behaviour {
receive tick from ticker
send true on battReq
receive reading from battVal
if (reading & 4) == 4
then setRedLedPower(true)
else setRedLedPower(false)
if (reading & 2) == 2
then setBlueLedPower(true)
else setBlueLedPower(false)
if (reading & 1) == 1
then setGreenLedPower(true)
else setGreenLedPower(false)
}
}
s = new sense()
connect s.battReq to sensors.batteryRequest
connect s.battVal to sensors.batteryOut
setTimer(s.ticker , 0.098 , true)
Figure 3: Entire Insense SenseC program.
4 InceOS
InceOS is a new operating system that has been
specifically created to execute applications written in
Insense. The OS is pre-emptive and supports the
concurrent execution of multiple Insense components.
The language concepts of components and channels
are directly implemented, ensuring that the language
semantics are captured and enforced in the OS. In-
ceOS itself is written in C, and exports an API which
is targeted by the Insense compiler.
InceOS provides Insense applications with both
system calls and system components. System calls
are provided to manage the fundamental language
abstractions: channels and components, and to per-
form appropriate checks such as array bounds checks.
These system calls are used by the C code gen-
erated by the Insense compiler. The system calls
mainly encompass the creation, destruction, and ma-
SENSORNETS 2012 - International Conference on Sensor Networks
38

nipulation of components and channels; for example,
channel send() and channel receive() abstract
over the communication and concurrency control as-
pects of inter-component communication. There is no
need for the run-time to ensure type safety of such
operations as this is ensured by the compiler. These
system calls provide a platform-neutral API for the
Insense compiler, enabling the language to be ported
to multiple sensor hardware platforms.
The OS also provides a number of system com-
ponents which provide an abstraction over access to
the platform specific hardware and services, for ex-
ample, the battery sensor in Figure 3. These compo-
nents are well-known, in that they are known to both
the programmer and Insense compiler. An application
interacts with these system components via channels.
These system components include the timer, radio,
buttons, and sensors.
4.1 Scheduling and Threads
Due to the close coupling of channels and compo-
nents, the InceOS scheduler does not need to maintain
references to components which are blocked and un-
schedulable. A blocked component can only become
eligible to run through the rendezvous of channel ac-
tions; the most recent rendezvous action unblocks the
component and places it onto the run queue of the
scheduler. This is possible as each channel is aware of
the components to which it is connected; thus when a
channel action occurs, only the relevant components
are examined. Consequently, the scheduler is simpli-
fied, as it has less state to maintain. TinyOS requires a
programmer to explicitly post a task to the scheduler
before it can be executed. While this is not neces-
sarily an onerous requirement on the programmer in
TinyOS, the removal of this responsibility by InceOS
simplifies the process.
InceOS provides a round robin scheduler with a
quantum of 30 ms and two priority levels: interrupt
and normal. Normal priority is for any component,
system or user, which becomes runnable as a result
of a channel operation. Interrupt priority is only used
for system components which are made runnable by
hardware interrupts. For both priority levels, the same
run queue is used; normal priority components are
added at the tail of the run queue, and interrupt prior-
ity components are placed at the head. Should mul-
tiple components be scheduled at interrupt priority,
they are added in chronological order. To simplify
the interaction with the hardware, a system compo-
nent simply waits on a channel in the same manner
as the sense component in Figure 3 waits on a tick
from the ticker channel. The following exemplifies
this for the system-level Timer component which in-
terfaces with both the timer hardware and user-level
components. The hardware timer generates interrupts
causing an interrupt handler to be invoked. The han-
dler sends a message to the system-level Timer com-
ponent on its interrupt channel. The Timer component
repeatedly waits for messages from an interrupt chan-
nel prior to sending messages to those user-level com-
ponents for which requested timers are due. At the
end of its behaviour clause, the Timer component re-
sets the hardware timer for the next outstanding user-
level timer that is due to expire prior to waiting for
the next interrupt to occur. In this way, the system
components are able to interact with both user com-
ponents and hardware via the channel mechanism.
As with TinyOS, InceOS enters a low power state
when there is no more work to be done - i.e., the
scheduler’s run queue is empty. The system reawak-
ens when a hardware interrupt causes a system com-
ponent to become schedulable again. User compo-
nents are awakened when messages are received on
the channels on which they are blocked as described
above.
Each user component in Insense is pre-emptible,
ensuring a fair share of the CPU to all eligible user
components. This requires that each component has
an associated thread and stack. The main opposition
to threads and stacks on motes is that they consume
relatively large amounts of limited RAM. Insense and
InceOS minimise this impact by determining the stack
size required for each component’s behaviour at com-
pile time and dynamically allocating this at runtime,
as described in section 3.4. For example, the compiler
has calculated a stack size of 22 bytes for the compo-
nent in Figure 3. This provides space for local vari-
ables, as well as variables required by the OS. A fur-
ther 120 bytes are added to provide space for system
actions and interrupts, giving a maximum stack depth
of 142 bytes. The compiler also calculated a size of
10 bytes for the component’s heap object. This is used
to hold references to a component’s channels and in-
stance state, as well as the fields used for garbage col-
lection and component manipulation. These values
are passed to the OS when creating a component.
4.2 Radio Comms
Presently, InceOS has broadcast and unicast capabil-
ities. It does not support tree based routing proto-
cols, or IP, unlike TinyOS. However, these can be
implemented within a programmer’s application. At
present, user components communicate with a radio
component provided by the system. This component
provides two input channels, broadcast and unicast,
CHANNEL AND ACTIVE COMPONENT ABSTRACTIONS FOR WSN PROGRAMMING - A Language Model with
Operating System Support
39

and a single output channel, received. A user com-
ponent will connect to either the broadcast channel
to send broadcast messages, or the unicast channel to
send unicast messages. A component wishing to re-
ceive either type of message connects to the received
channel.
5 EVALUATION
In order to demonstrate that applications written us-
ing Insense both fit onto and run efficiently on real
mote hardware, a number of comparisons were made
between Insense and nesC, and InceOS and TinyOS.
Several WSN applications were written in nesC and
Insense and executed on their respective operating
systems. All of the following results were obtained
from Tmote Sky
2
motes which have 10 KB of RAM
and 48 KB of flash available. The motes were tested
under full power.
5.1 Applications
The chosen test applications are primarily from the
TinyOS source tree, augmented with some that were
explicitly constructed to highlight syntactic and com-
putational performance differences. The source code
for all of these applications is available online
3
.
• BlinkA is a simple application that periodically
blinks the three different LED’s of the Tmote
Sky at different rates. BlinkB performs the
same operation using the TinyOS thread library
(TOSThreads (Klues et al., 2009)).
• TestSineSensor periodically samples a sensor, af-
ter which it forwards the obtained value over the
serial link. Under TinyOS, it is implemented us-
ing TOSThreads.
• RadioStress uses three threads to send messages
to another mote where three threads are listen-
ing for messages from their counterparts. Under
TinyOS, it is implemented using TOSThreads.
• RadioCountToLeds involves two motes, one
maintains a counter which is transmitted over the
radio to the other mote which displays the lower
three bits of the transmitted value on its LED’s.
• RadioSenseToLeds is a similar application, except
that it collects and sends sensor data as opposed
to a software counter.
2
http://www.sentilla.com/moteiv-transition.html, Ac-
cessed on 25/09/2011.
3
http://blogs.cs.st-andrews.ac.uk/insense/insense-on-
inceos-examples/
• Sense is similar to RadioSenseToLeds, but it only
uses one mote and does not send sensor values
over the radio, as shown in Figures 2 and 3.
• TestRoundRobinArbiter is an example of an ac-
cess control mechanism where three resource
users request access from a central controller,
which grants access to each in turn.
• Fourier performs a Fourier transform on an array
of 40 integers repeatedly.
• Grid is based on the notion of using ad-hoc
grids in sensor networks to mitigate the power
consumed by excessive radio transmission of
data (Rondini and Hailes, 2007). This applica-
tion consists of two types of node: leaders, who
make requests, and slaves, who service requests.
Initially the leader broadcasts a request asking for
any free slave. Once a slave replies to this re-
quest, the leader collects enough sensor data to
fill an array of size 10 and transmits it to the
slave that acknowledged it. The slave performs a
Fourier transform on the received data, calculates
the maximum value and returns this to the leader.
The Grid and Fourier applications were not pro-
vided by TinyOS. The combination of these applica-
tions cover intense computation, radio transmission,
interactions between components on a single node
and combinations thereof.
5.2 Concurrency and Serialisation
As each component within Insense executes an iso-
lated, independent thread, there is no need for the de-
veloper to use any special thread libraries, functions
or routines while writing an application, in contrast to
TinyOS. Instead they can simply concentrate on writ-
ing the code that embodies the activity of a compo-
nent within its behaviour. Additionally, as InceOS is
pre-emptive, it will ensure that all user components
that are eligible to be run have an equal opportunity
to do so. This ensures that no one component monop-
olises the CPU, and does not require the programmer
to explicitly yield control.
A context switch in InceOS takes 15.3µs (380 as-
sembly instructions). Context switching is often cited
as a drawback of using threads in embedded systems,
however these values show that the time required to
go from executing in one component to another is
small and bounded.
One of the most common problems associated
with concurrency is the incorrect use of locking mech-
anisms to guarantee serialised access to shared vari-
ables, leading to race conditions and deadlock. In-
sense removes race conditions by making the instance
SENSORNETS 2012 - International Conference on Sensor Networks
40

Table 1: Comparison of Insense and nesC code.
Lines of Code Components Wiring Statements Interfaces
Application Insense nesC Insense nesC Insense nesC Insense nesC
BlinkA 28 40 2 6 3 5 1 5
BlinkB 30 54 4 7 1 6 1 6
TestSineSensor 13 45 2 7 2 8 1 7
RadioStress 50 94 5 13 9 12 1 12
RadioCountToLeds 55 103 5 7 4 7 2 7
RadioSenseToLeds 57 101 6 8 6 8 2 8
Sense 29 43 3 5 3 4 1 4
TestRoundRobinArbiter 49 180 5 11 10 15 2 24
Fourier 19 30 1 2 0 1 1 1
Grid 97 177 5 8 7 8 1 8
state of components private as part of the language.
When data must be shared between components, it is
done via the channel mechanism. The channel mech-
anism must be efficient for production use. In In-
ceOS, typical transmission time on a channel when
both components are ready is 215±0.08µs.
5.3 Code Composition
Both Insense and nesC applications are composed of
components, interfaces, and wiring statements. Ac-
cordingly, these features were used as metrics to judge
code complexity. Table 1 shows the results. The ta-
ble shows the application, number of lines of code
used, number of components either written or refer-
enced, number of wiring/connect statements, and the
number of interfaces used. Obviously each of these
features could be manipulated -e.g., every Insense ap-
plication could be written in a single component. To
prevent this, each Insense application uses a compo-
nent representing each activity of the program and the
system components.
The table shows that the applications can be writ-
ten in Insense with fewer elements from each cate-
gory, excluding the Fourier application where both
languages require one interface. Although it does
not necessarily follow that fewer is better, the pre-
vious discussion of the simpler composition of In-
sense and these results show that it is possible to
write functionally-equivalent programs in Insense
with many fewer lines of code.
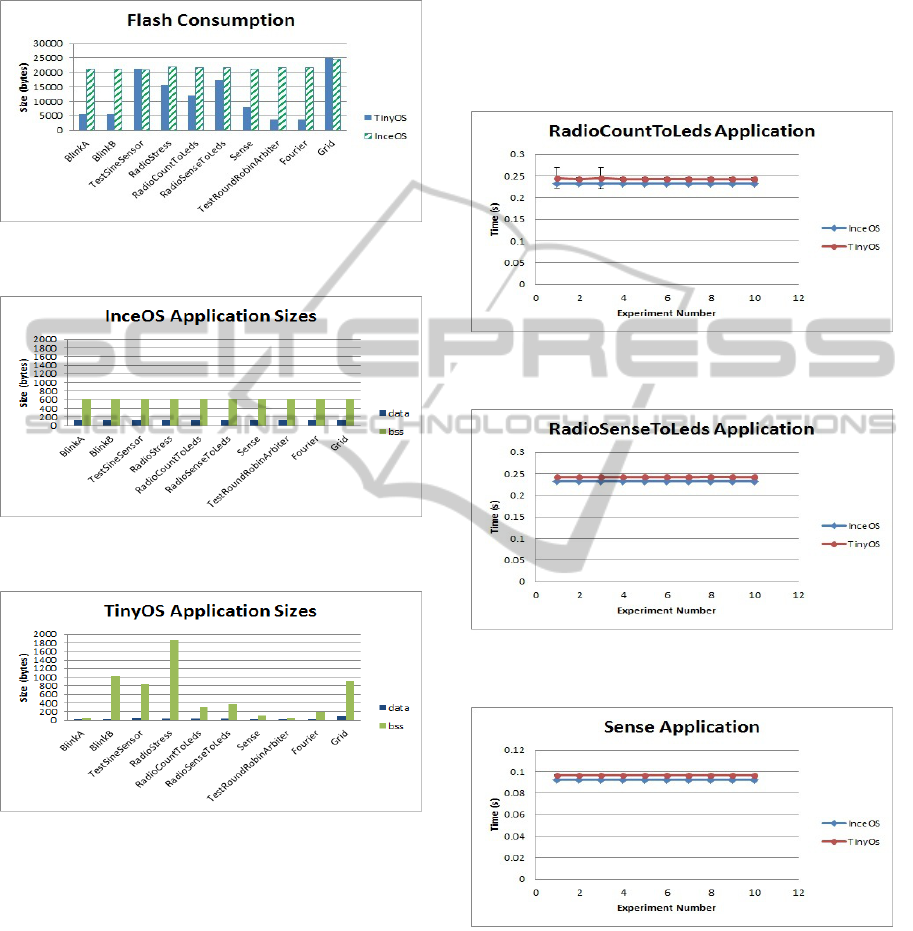
5.4 Size
Figure 4 shows the amount of flash which is con-
sumed on the Tmote Sky by TinyOS and InceOS
when compiled with an application. Figure 5 shows
the amount of space consumed by the data and bss
sections of the compiled InceOS and application, and
Figure 6 shows the equivalent for TinyOS. It can be
seen that there is variation between the applications
on TinyOS compared to the relatively static figures for
InceOS. InceOS consumes more flash than TinyOS
partially due to the optimisations of the nesC com-
piler, but mostly due to the extra support mechanisms
found in InceOS. These include the runtime features
discussed previously.
InceOS dynamically allocates the structures used
to represent channels and components at runtime. Dy-
namic allocation leads to the small values seen in Fig-
ure 5, and the lack of conditional compilation causes
them to be uniform across the different applications.
The use of dynamic allocation and stacks exacts a run-
time cost in RAM. The cost for Insense and InceOS is
highlighted via two examples. The first uses a (null)
component with no channels and no code in the be-
haviour section. This null component requires 188
bytes. The 188 bytes is the size required to repre-
sent the component, its channels, its stack, and any
dynamically allocated structures. After the system
and null components are initialised, with both com-
ponents and channels being allocated, there are 4363
bytes of RAM available. The second example uses
the component from Figure 3. Here the sense compo-
nent requires 364 bytes, leaving 4187 bytes of RAM
available. Taking the sense component as an exam-
ple of an average component, there is enough space
on the Tmote Sky to create 11 such components. As
discussed in section 4.1, 120 bytes are added to the
compiler computed stack size for a component to ac-
commodate system calls and interrupts. We intend
to introduce a kernel stack for all system operations,
thus reducing the 120 byte overhead to 26 bytes, the
maximum stack space required for an interrupt. For
the sense example above, this would permit the cre-
ation of 17 Sense component instances, each consum-
ing 272 bytes of RAM.
InceOS consumes more flash and RAM than
TinyOS, however there is still adequate space avail-
able on the motes for even larger and more complex
applications; the largest and most complex applica-
tion in this evaluation, grid, leaves just under 24 KB
CHANNEL AND ACTIVE COMPONENT ABSTRACTIONS FOR WSN PROGRAMMING - A Language Model with
Operating System Support
41
of flash and nearly 3 KB of RAM available, 50% and
31% of the total space available, respectively.
Figure 4: Flash consumed by applications and specified OS.
Figure 5: Space consumed by InceOS applications.
Figure 6: Space consumed by TinyOS applications.
5.5 Performance
To ascertain if support for the channel and thread-
ing mechanisms exact some cost in performance, we
measured the performance of a representative cross
section of the applications on both TinyOS and In-
ceOS. In the following graphs, each data point is the
average of 100 iterations of the application. For ex-
ample, each point in Figure 7 is the average time re-
quired to increment a software counter and broadcast
this value in a packet over the radio 100 times. The
error bars on each point represent the standard de-
viation, however most are not visible as the results
are often consistent within the measurement accuracy.
Both TinyOS and InceOS are using a csma/ca proto-
col for radio transmission - i.e., before attempting to
send, the radio hardware is queried to detect the pres-
ence of other radio transmissions; if radio signals are
detected, the transmission is delayed, otherwise the
packets are sent.
Figure 7: Comparison of RadioCountToLeds application.
Figure 8: Comparison of RadioSenseToLeds application.
Figure 9: Comparison of the Sense application.
In both Figures 7 and 8, the measurements reflect
the sender’s action of collecting the data to be sent
and sending it. Both figures show a similar perfor-
mance increase of approximately 4 ms for InceOS as
compared to TinyOS. This can be attributed to the
fact that the Insense behaviour clause is repeatedly
executed, rather than in TinyOS where events must
be generated before the application can continue to
SENSORNETS 2012 - International Conference on Sensor Networks
42
its next iteration. Figure 9 shows the comparison of
the Sense application from Figures 2 and 3. We can
see that InceOS performs a further 2 ms better than it
did in Figures 7 and 8. This is because unlike Radio-
Count/SenseToLeds, the InceOS Radio component is
not being used (or being scheduled) thus giving more
time for the Sense component to execute.
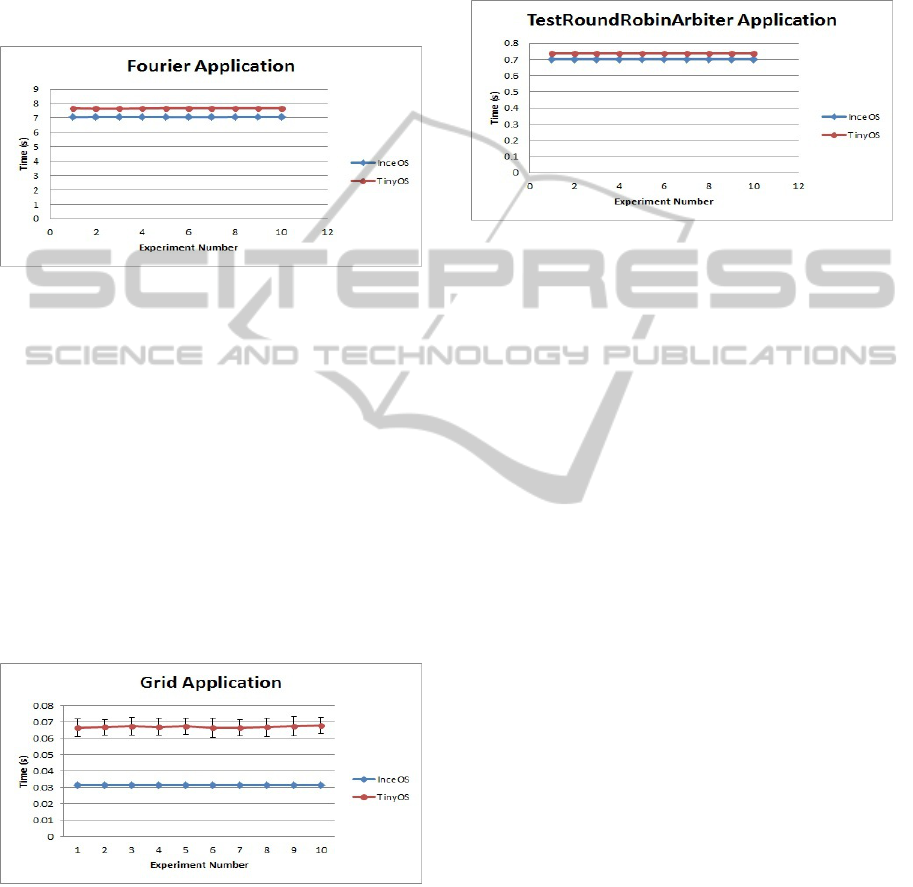
Figure 10: Comparison of the Fourier application.
Figure 10 shows an example of intense compu-
tation; the measurements reflect the time required to
complete a fast Fourier transform on a forty element
array and then calculate the maximum. Again In-
ceOS outperforms TinyOS. This is due to the use of
tasks in TinyOS to process the Fourier computation.
When the task is finished, it must be reposted, requir-
ing an invocation of the scheduler, whereas the be-
haviour clause in Insense is naturally repeated, not
requiring any intervention by the scheduler, or extra
code from the developer. This highlights that a purely
event-driven model is not well-suited to straight com-
putation (Dunkels et al., 2004).
Figure 11: Comparison of the Grid application.
The results for the grid application are shown in
Figure 11. Here the time for a complete iteration of
the application is taken: request a slave, give it work
and collect the reply. We see that InceOS performs
substantially better than TinyOS. The 35 ms differ-
ence is caused by a simpler flow through the logic of
the Insense application and the relatively small num-
ber of actions required to access the sensor and radio
components. This is in contrast to the disjoint flow
necessitated by control switching between the event
handlers of the application in nesC, as well as the
posting of a task to compute the Fourier transform.
Figure 12: Comparison of the TestRoundRobinArbiter ap-
plication.
The TestRoundRobinArbiter application results
are displayed in Figure 12, again showing an InceOS
performance gain when compared to TinyOS. Here
the 36 ms gain is because the Insense channel abstrac-
tion is used in InceOS to arbitrate access to the shared
resource, whereas additional functionality is required
for such arbitration using TinyOS. This particular ap-
plication is well-suited to the Insense blocking chan-
nel interaction which naturally handles arbitration.
5.6 Summary
The initial hypothesis was that sensor network appli-
cations written using a programming language with
more appropriate abstractions, such as active compo-
nents communicating over synchronous channels (as
provided by Insense/InceOS), fit onto and run effi-
ciently on real mote hardware. By comparing In-
sense implementations against equivalent nesC imple-
mentations on the same hardware platform, we have
demonstrated the following:
• It is possible to write functionally-equivalent pro-
grams in Insense with many fewer lines of code;
• InceOS applications consistently outperform
TinyOS for all applications in our test suite;
• Insense/InceOS systems consume more RAM and
Flash memory to provide this performance, but a
substantial fraction of each resource still remains
for use by applications.
CHANNEL AND ACTIVE COMPONENT ABSTRACTIONS FOR WSN PROGRAMMING - A Language Model with
Operating System Support
43

6 FUTURE WORK
Given the strong encapsulation exhibited by Insense
components, as well as the low coupling between
them, an obvious next step is to include dynamic re-
programming via the radio in Insense and an imple-
mentation in InceOS. This will enable dynamic, over-
the-air composition of components at runtime.
Currently the radio interaction is exposed to the
programmer and is the only means of inter-node com-
munication. Although the actual hardware interaction
is abstracted, the programmer is aware of the radio
transfer via the Radio component. Future work will
include the ability to introspect and react to the nodes
network environment, thus making it possible to dis-
cover a node’s neighbours and be alerted to changes.
New language-based systems can only become
prevalent if sufficient program development, testing,
verification, deployment, and runtime monitoring ca-
pabilities are also provided. We are building such a
development environment for Insense/InceOS-based
systems.
7 CONCLUSIONS
The language-specific operating system, InceOS, en-
ables programs written in Insense to exhibit the space
and time efficiency needed for production use in sen-
sor networks. A comparison of Insense/InceOS and
nesC/TinyOS code for a range of applications shows
that it is possible to write functionally-equivalent pro-
grams in fewer lines of Insense and that InceOS appli-
cations consistently outperform their TinyOS counter-
parts. Thus, use of the component-based abstractions
provided by Insense coupled with the efficient sup-
port for these abstractions in InceOS facilitates the
development of WSN applications that exhibit state-
of-the-art performance while reducing programming
complexity.
More generally, we conclude that provision of
a language-specific operating system is an effective
mechanism for making programs written in higher-
level languages competitive with equivalent programs
written in lower-level languages supported by more
general-purpose operating systems.
REFERENCES
Burrell, J., Brooke, T., and Beckwith, R. (2004). Vineyard
computing: Sensor networks in agricultural produc-
tion. IEEE Pervasive Computing, 3:38–45.
Dearle, A., Balasubramaniam, D., Lewis, J., and Morri-
son, R. (2008). A component-based model and lan-
guage for wireless sensor network applications. In
COMPSAC ’08: Proceedings of the 2008 32nd An-
nual IEEE International Computer Software and Ap-
plications Conference, pages 1303–1308, Washing-
ton, DC, USA. IEEE Computer Society.
Dunkels, A., Gronvall, B., and Voigt, T. (2004). Contiki
- a lightweight and flexible operating system for tiny
networked sensors. In LCN ’04: Proceedings of the
29th Annual IEEE International Conference on Lo-
cal Computer Networks, pages 455–462, Washington,
DC, USA. IEEE Computer Society.
Gay, D., Levis, P., von Behren, R., Welsh, M., Brewer, E.,
and Culler, D. (2003). The nesC language: A holistic
approach to networked embedded systems. In PLDI
’03: Proceedings of the ACM SIGPLAN 2003 con-
ference on Programming language design and imple-
mentation, volume 38, pages 1–11, New York, NY,
USA. ACM.
Hasler, A., Talzi, I., Tschudin, C., and Gruber, S. (2008).
Wireless sensor networks in permafrost research
- concept, requirements, implementation and chal-
lenges. In Proc. 9th Intl Conf. on Permafrost (NICOP
2008.
Hauer, J. (2006). nesc sense application reposi-
tory. Web Site. http://code.google.com/p/tinyos-
main/source/browse/trunk/apps/Sense/?r=2898 , Ac-
cessed on 25/09/2011.
Hewitt, C., Bishop, P., and Steiger, R. (1973). A universal
modular actor formalism for artificial intelligence. In
Proceedings of the 3rd international joint conference
on Artificial intelligence, pages 235–245, San Fran-
cisco, CA, USA. Morgan Kaufmann Publishers Inc.
Hill, J., Szewczyk, R., Woo, A., Hollar, S., Culler, D.,
and Pister, K. (2000). System architecture directions
for networked sensors. SIGOPS Oper. Syst. Rev.,
34(5):93–104.
Klues, K., Liang, C.-J. M., Paek, J., Mus
˘
aloiu-E, R., Levis,
P., Terzis, A., and Govindan, R. (2009). Tosthreads:
thread-safe and non-invasive preemption in tinyos. In
Proceedings of the 7th ACM Conference on Embedded
Networked Sensor Systems, SenSys ’09, pages 127–
140, New York, NY, USA. ACM.
Milner, R., Parrow, J., and Walker, D. (1992). A calculus of
mobile processes, i. Inf. Comput., 100(1):1–40.
Porter, B. and Coulson, G. (2009). Lorien: a pure dy-
namic component-based operating system for wire-
less sensor networks. In MidSens ’09: Proceedings of
the 4th International Workshop on Middleware Tools,
Services and Run-Time Support for Sensor Networks,
pages 7–12, New York, NY, USA. ACM.
Rondini, E. and Hailes, S. (2007). Distributed compu-
tation in wireless ad hoc grids with bandwidth con-
trol. In Proceedings of the 5th international confer-
ence on Embedded networked sensor systems, SenSys
’07, pages 437–438, New York, NY, USA. ACM.
SENSORNETS 2012 - International Conference on Sensor Networks
44
