
PARALLEL R-CENTIPEDES
Fast Contour Extraction for 3D Visualization
Mehdi Nouri Shirazi and Yoshiyuki Kamakura
Faculty of Information Science and Technology, Osaka Institute of Technology, Osaka, Japan
Keywords:
Deformable Contours, Active Contours, Electron-microscope Tomographic Images, 3D-visualization.
Abstract:
In our previous article, we introduced a class of region-based deformable contour models called R-centipedes.
The R-centipedes are able to operate in three modes: 1) deflationary, 2) inflationary, or 3) a mixture of both.
We demonstrated that the deflationary R-centipedes could adaptively change their structures in order to ex-
tract structures of interest and their substructures from complex Electron Microscope (EM) tomography slice
images. The R-centipedes have several desirable features such as 1) structural flexibility which allows them
to extract multiple objects in a single slice image, 2) high accuracy, and 3) insensitivity with respect to their
initial positions and configurations. In this article, we introduce two parallel versions of the R-centipedes, 1)
implicit, and 2) explicit parallel R-centipedes. We present three simulation studies to demonstrate their flexi-
bility, effectiveness and computational efficiency in extracting structures in three different complex situations.
1 INTRODUCTION
Extracting meaningful structures of interest and their
internal structures from medical and EM tomographic
slice images for 3D visualization is a challenging
problem. This is due to the complexity and variabil-
ity of the biological structures that are usually em-
bedded in intensity inhomogeneities, imaging noise,
textural artifacts and boundary irregularities, the large
size (> 1000 × 1000 pixels) and numerous number
(> 256 slices) of tomographic images that should be
processed. The challenge is to extract the bound-
ary pixels belonging to the structures of interest from
each slice image and integrate them into complete and
consistent 3D representations of the objects and their
parts as fast as possible and preferably with no or min-
imal user interaction.
Deformable contour models (McInerney and Ter-
zopoulos, 1996), including the standard energy-
minimizing snakes (Kass et al., 1988) and balloons
(Cohen, 1991), offer an attractive approach to con-
tour extraction problem and have been used broadly
in image segmentation. The active contours move and
deform within the slice images under a combined in-
fluence of internal and external forces.
Though the standard deformable models have
proved to be very useful tools in 3D visualization they
suffer from some characteristic limitations. First, they
should manually be initialized close to the boundaries
of the target objects. Second, the segmentation results
might be dependent on the positions of the initial con-
tours. Third, they are geometrically inflexible due to
inability to re-parametrize. Finally, they are incapable
of adapting to object topology.
To overcome the limitations of the standard
snakes, McInerney and Terzopoulos (McInerney and
Terzopoulos, 1995) augmented the snakes with re-
parametrization, splitting and merging mechanisms
using the affine cell image decomposition (ACID)
technique. They showed that their topology adaptive
snakes, called the T-snakes, could successfully extract
multiple objects and even grew into structures with
complex geometries in different medical image anal-
ysis scenarios.
Almost all the standard explicit snakes and their
topology adaptive versions are edge-based models.
There are several well known problems with edge-
based snakes. First, edge-based snakes use edge de-
tector to stop their evolving contours on the bound-
aries of the target objects. Second, if the image is
noisy, the image should be smoothed isotropically. If
the image is very noisy, the Gaussian smoothing has
to be strong which will smooth the stopping edges
too. Third, to get rid of spurious weak edges the
user has to set a threshold, which is usually a criti-
cal parameter that directly affects the quality of the
segmentation result. Fourth, the edge-based models
are inapplicable in cases where the boundaries of the
713
Nouri Shirazi M. and Kamakura Y..
PARALLEL R-CENTIPEDES - Fast Contour Extraction for 3D Visualization.
DOI: 10.5220/0003825807130718
In Proceedings of the International Conference on Computer Graphics Theory and Applications (IVAPP-2012), pages 713-718
ISBN: 978-989-8565-02-0
Copyright
c
2012 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: The neighboring nodes of a closed centipede are
coupled through the elasticity and rigidity parameters, ω
1
,
ω
2
.
target objects are not necessarily defined by gradients.
Fifth, they easily get stuck with textural artifacts.
These limitations seriously mitigate the applica-
bility of the edge-based snakes in complex situations
in general, and in EM tomography image analysis
and 3D visualization in particular, where demands are
high for speed, accuracy and automation with no or
minimal user interaction.
In our previous article (Shirazi and Kamakura,
2010), we introduced a class of region-based topo-
logically flexible deformable models that we called
restructuring centipedes (R-centipedes). In this ar-
ticle, we introduce two parallel versions of the R-
centipedes dubbed explicit parallel R-centipedes and
implicit parallel R-centipedes. Our experiments with
the parallel R-centipedes have shown that they are
structurally flexible enough: 1) to extract structures
with complex boundaries from EM tomography slice
images when operating in their deflationary mode,
and 2) grow into micro-tubular complex structures
with high speed and accuracy when operating in their
inflationary mode.
2 RESTRUCTURING
CENTIPEDES
A closed centipede consists of a number of self-
powered two-legged moving automatons (nodes),
where the neighboring nodes are coupled as shown in
Fig. 1. The legs are facilitated with sensory patches
whereby the centipedes can interact with their envi-
ronments.
Restructuring centipedes (R-Centipedes) are de-
formable centipedes which can restructure themselves
by, 1) recruiting new nodes, 2) removing nodes, 3)
splitting into new R-centipedes, and 4) merging with
the other R-centipedes that they might come into con-
tact.
As shown in Fig. 2, with each node there are asso-
ciated, 1) one inner patch P
i,k
, 2) one outer patch P
o,k
,
and 3) a self-powered moving force
~
γ
k
.
While R-centipedes undergo deformation and re-
structuring, their nodes are assumed to keep the axes
of their inner and outer patches aligned and perpen-
Figure 2: The inner patch P
i,k
, outer patch P
o,k
, self-
powered moving force
~
γ
k
, and the external force
~
f
k
at node
k.
dicular to the lines passing through their two neigh-
boring nodes, as shown in Fig. 2.
2.1 Deformation Equations
Let~v
k
(t) = [x
k
(t) y
k
(t)]
T
denote the time-varying po-
sition vector of node k. The dynamical behavior of a
closed deformable centipede that consists of N cou-
pled self-powered moving nodes is assumed to be
governed by the following motion equations
˙
~v
k
−
~
α
k
+
~
β
k
−
~
γ
k
=
~
f
k
, (1)
for all k = 0,...,N − 1. The first term of Eq. (1),
˙
~v
k
,
denotes the velocity of node k,
~
α
k
and
~
β
k
are image-
independent internal forces known as the tensile force
and the flexural force at node k, respectively,
~
γ
k
is a
self-powered moving force at node k, and finally
~
f
k
is
an external force which the image might exert at node
k.
The internal tensile and flexural forces are given
by
~
α
k
(t) = ω
1
∆
2
~v
k
(t), (2)
and
~
β
k
(t) = ω
2
∆
2
(∆
2
~v
k
(t)), (3)
respectively, where the 2nd-order difference operator
∆
2
is given by
∆
2
~v
k
(t) = (~v
k−1
(t) − 2~v
k
(t) +~v
k+1
(t))/(∆l(t))
2
. (4)
In the above equations, the parameter ω
1
controls
the resistance of the centipede to expanding and/or
shrinking, whereas ω
2
controls the resistance of the
centipede to bending at its nodes, and finally ∆l(t)
denotes the time-varying distance between the imme-
diate neighboring nodes. For closed centipedes, all
indexes in the above expressions is interpreted mod-
ulo N.
The self-powered moving forces are given by
~
γ
k
(t) = c
γ
~n
k
(t), (5)
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
714

where ~n
k
(t) denotes a time varying vector defined as
a unit vector perpendicular to the line passing through
the k-th node’s immediate two neighboring nodes.
The constant c
γ
controls the magnitude of the self-
powered forces. When all nodal self-powered forces
are exerted inwardly the R-centipede shrinks (defla-
tionary R-centiped), when all exerted outwardly it ex-
pands (inflationary R-centiped), and when partly in-
wardly and partly outwardly we will have deflation-
ary/inflationary R-centipedes which can be used in
object tracking problems.
The last components which affect the behaviors
of R-centipede are the time-varying external forces
~
f
k
(t). The concrete form of these forces are in gen-
eral application dependent. Here, we define them
as image-dependent stopping forces which can even-
tually bring the deformation process to halt at the
boundaries of the objects of interest.
Let P
i,k
(t), and P
o,k
(t) denote the sets of the lo-
cations of the pixels that come under the inner and
outer patches of node k at time t, respectively. Let
m
i,k
(t) and m
o,k
(t) denote the mean values of the gray-
levels of the pixels belong to P
i,k
(t), and P
o,k
(t), re-
spectively, by
m
i,k
(t) =
1
| P
i,k
(t) |
∑
(i, j)∈P
i,k
(t)
I(i, j), (6)
m
o,k
(t) =
1
| P
o,k
(t) |
∑
(i, j)∈P
o,k
(t)
I(i, j), (7)
where | P
i,k
(t) |, and | P
o,k
(t) | are the cardinal num-
bers of P
i,k
(t) and P
o,k
(t), respectively.
Furthermore, let
m
i
(t) and m
o
(t) denote the means
of m
i,k
(t) and m
o,k
(t) and σ
i
(t) and σ
o
(t) their stan-
dard deviations. Then, the external nodal forces for
the deflationary R-centipedes are defined by
~
f
k
(t) =
−
~
γ
k
(t), if m
i,k
(t) ≥
m
o
(t
0
) + c
s
σ
o
(t
0
)
0, otherwise,
(8)
and for the infalationary R-centipedes by
~
f
k
(t) =
−
~
γ
k
(t), if m
o,k
(t) ≤
m
i
(t
0
) + c
s
σ
i
(t
0
)
0, otherwise.
(9)
Here the constant c
s
controls the degree of textural
mismatching that is tolerated, and t
0
denotes the time
when the R-centipede is created and set free to move
and deform.
2.2 Restructuring Rules
The R-centipedes are allowed to restructure by, 1) re-
cruiting (adding) new nodes, 2) dismissing (deleting)
nodes, and 3) splitting. They add and delete nodes in
order to keep the lengths of their two-node segments
approximately constant. They check the lengths of
their segments after each incremental deformation,
add a new node in the middle of any segment which
they find to be too long, and/or delete one of the two
nodes of any segment which they find to be too short.
Active R-centipedes are also allowed to split into two
R-centipedes whenever they detect a self-crossing.
The ability to split enable the R-centipedes, firstly,
to generate the same final configurations regardless of
their initial positions/configurations taht encompass
the objects of interest, secondly, to extract multiple
objects in slice images, and thirdly, not get stuck with
textural artifacts which exist rampantly in EM tomog-
raphy slice images.
2.3 Non-parallel Incremental
Deformation Rule
To solve the motion equations of a deflationary R-
centipede defined by Eqs. (1)-(6) and (8), or an infla-
tionary R-centipede defined by Eqs. (1)-(7) and (9),
we used the implicit Euler method in our previous
article (Shirazi and Kamakura, 2010). The implicit
Euler method approximates the temporal derivatives
with forward finite differences. It updates the x- and
y-components of the positions of nodes from time t to
time t + ∆t according to the following 2N system of
nonlinear equations
(I + ∆tC(t))
~
V(t + ∆t) =
~
V(t) + ∆t(
~
F(t) +
~
Γ(t)), (10)
where I denotes the (N(t) × N(t))-dimensional iden-
tity matrix, whereas C(t) denotes an (N(t) × N(t))-
dimensional matrix known as the stiffness matrix (for
detail, see (Shirazi and Kamakura, 2010)).
In the above equation,
~
V(t) =
[~v
0
(t)...~v
N(t)−1
(t)]
T
denotes the N(t)-dimensional
vectors of the locations of the centipede’s nodes at
time t, whereas
~
Γ(t) = [
~
γ
0
(t)...
~
γ
N(t)−1
(t)]
T
denotes
the N(t)-dimensional vectors of the self-powered
moving nodal forces, and
~
F(t) = [
~
f
0
(t)...
~
f
N(t)−1
(t)]
T
denotes the the image-dependent stopping forces at
time t.
3 PARALLEL INCREMENTAL
DEFORMATION RULES
By expanding Eq. (1) at the node k, and by using Eqs.
(2)-(4) we will get
˙
~v
k
=
~
f
k
+
~
γ
k
− c
2
~v
k−2
− c
1
~v
k−1
− c
0
~v
k
− c
1
~v
k+1
− c
2
~v
k+2
. (11)
PARALLEL R-CENTIPEDES - Fast Contour Extraction for 3D Visualization
715
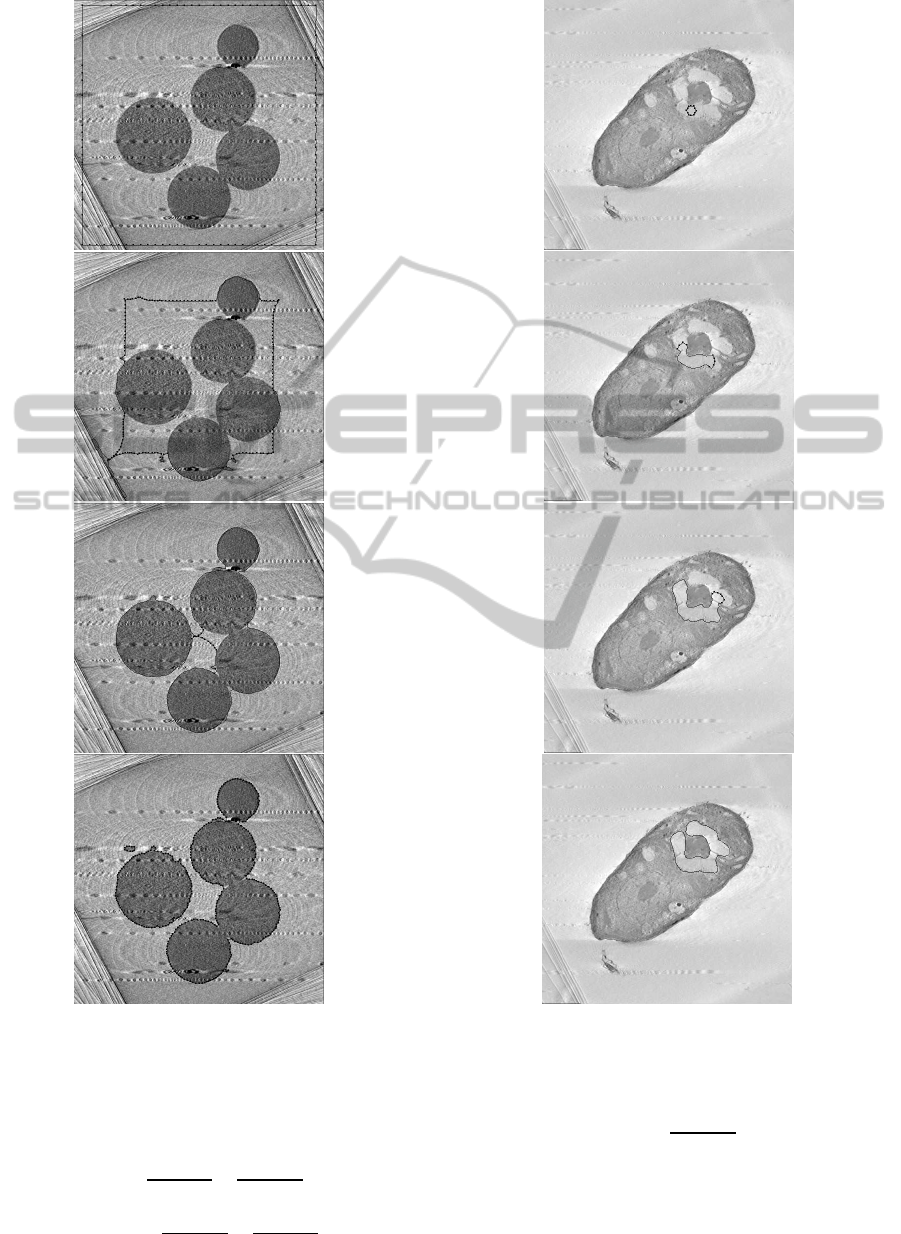
Figure 3: Deflationary mode: snap shots of the contour ex-
traction process. The bottom image shows the final posi-
tions/configurations of the four R-centipedes that generated
and survived in the process.
where c
0
, c
1
and c
3
are given as
c
0
=
2ω
1
(∆l(t))
2
+
6ω
2
(∆l(t))
4
, (12)
c
1
= −
ω
1
(∆l(t))
2
−
4ω
2
(∆l(t))
4
, (13)
Figure 4: Inflationary mode: snap shots of the contour ex-
traction process. The bottom image shows the extracted
boundary of a clicked substructure of an alga.
c
2
=
ω
2
(∆l(t))
4
. (14)
By using the implicit Euler method we can dis-
cretize Eq. (11) in time domain and get
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
716

Figure 5: Inflationary mode: snap shots of the extraction
process. The bottom image shows the extracted boundary
of a micro-tubular structure.
(1+∆tc
0
)~v
k
(t + ∆t) = ~v
k
(t)
− (c
2
~v
k−2
(t) + c
1
~v
k−1
(t)
+ c
1
~v
k+1
(t) + c
2
~v
k+2
(t))∆t
+ (
~
f
k
(t) +
~
γ
k
(t))∆t, (15)
and by using the explicit Euler method we get
~v
k
(t + ∆t) = (1− ∆tc
0
)~v
k
(t)
− (c
2
~v
k−2
(t) + c
1
~v
k−1
(t)
+ c
1
~v
k+1
(t) − c
2
~v
k+2
(t))∆t
+ (
~
f
k
(t) +
~
γ
k
(t))∆t. (16)
The rules given by the updating Eqs. (15) and (16)
are two different parallel versions of the non-parallel
incremental deformation rule given by the updating
rule (10).
4 SIMULATION EXPERIMENTS
4.1 Experiment 1
We applied the deflationary non-parallel and the two
parallel R-centipedes to the 500× 500 test EM slice
image shown in Fig. 3. We initiated 4-node R-
centipedes and positioned them near the frame of the
test image and let them move, deform, split and adapt
their nodes until they stabilized and stopped. The
upper three images show the snap shots of the in-
termediate positions and configurations of the defla-
tionary implicit parallel R-centipede at three differ-
ent instances. Though the intermediate positions and
configurations of the non-parallel and explicit paral-
lel R-centipedes were different, their final configura-
tions were almost the same to such extend that we
decided not to put them here for the sake of space.
We used the same parameters for the non-parallel
and parallel R-centipedes. The parameters used in
the simulation were: ω
1
= 0.2, ω
2
= 0.4, γ
c
= 300,
c
s
= 2.5, H
o
= H
i
= 4 (pixels), W
o
= W
i
= 7 (pixels),
∆l(t) = ∆l = 5 (pixels), and ∆t = 0.01.
This experiment clearly shows that, regardless
of the numerous textural artifacts scattered over the
background, the parallel R-centipedes like their non-
parallel predecessor are able to extract the contours of
the objects of interest with high precision.
The cpu-time that the non-parallel R-centipede
used was 6.18 seconds, while the two parallel R-
centipedes used about 1.93 seconds each.
4.2 Experiment 2
In our second experiment designed to demonstrate the
effectiveness and the speed of the proposed inflation-
ary parallel R-centipedes, we applied the non-parallel
and parallel R-centipedes to the 512 × 512 EM slice
image of an alga shown in Fig. 4.
The R-centipedes were initiated by a mouse click
on the internal substructure of interest and were let
PARALLEL R-CENTIPEDES - Fast Contour Extraction for 3D Visualization
717

free to move, deform, split and adapt their nodes until
they stabilized and stopped.
The three upper images of Fig. 4 show the inter-
mediate positions/configurations of the implicit par-
allel R-centipede at different instances, whereas the
bottom image shows the result of the contour ex-
traction process. Black dots in the intermediate im-
ages show the R-centipede’s active nodes, that is, the
nodes which have not yet encounter the substructure’s
boundary and thus are still free to move. The pa-
rameters used in the simulation were: ω
1
= 0.02,
ω
2
= 0.04, γ
c
= −50, c
s
= 2.5, H
o
= H
i
= 2 (pix-
els), W
o
= W
i
= 7 (pixels), ∆l(t) = ∆l = 4 (pixels),
and ∆t = 0.01.
The cpu-time that the non-parallel R-centipede
used was 1.59 seconds, whereas the parallel R-
centipedes used about 0.92 seconds each.
4.3 Experiment 3
On the contrary to the non-parallel R-centipedes
which consume the cpu-time to invert the N(t)×N(t)
stiffness matrices for updating the locations of all
nodes, the implicit and explicit parallel R-centipedes
are free from such matrix inversions and use the cpu-
time for updating the locations of the active nodes
only. This can make a big difference in terms of the
cpu-time consumptions in cases where the inflation-
ary R-centipedes should grow into tree-like structures
with lots of branches.
To demonstrate the cpu-time consumption effi-
ciency, in other words, to compare the speeds of the
inflationary non-parallel and parallel R-centipedes,
we applied them to the micro-tubular structure in the
228 × 177 shown in Fig. 5. The parameters used in
the simulation were: ω
1
= 0.02, ω
2
= 0.04, γ
c
= − 50,
c
s
= 2.5, H
o
= H
i
= 2 (pixels), W
o
= W
i
= 7 (pixels),
∆l(t) = ∆l = 4 (pixels), and ∆t = 0.01.
The cpu-time that the non-parallel R-centipede
used was 81.27 seconds, whereas the parallel R-
centipedes used about 9.93 seconds each.
5 CONCLUSIONS
We introduced two parallel R-centipedes, namely, the
implicit parallel R-centipedes and the explicit parallel
R-centipedes. Our simulation studies have shown that
they are almost identical in all situations in terms of
speed and accuracy in extracting structures of interest.
The parallel R-centipedes, like their non-parallel pre-
decessor, can be used with ease to automate the labor-
extensive and time-consuming contour extraction pro-
cess of the 3D visualization of the objects of interest
from a large number of medical and EM tomography
slice images with minimal user interaction.
ACKNOWLEDGEMENTS
This research was carried out in cooperation with
the Research Center for Ultra-High Voltage Electron
Microscopy of Osaka University and was supported
by a grant from JST (Japan Science and Technology
Agency).
REFERENCES
Cohen, L. D. (1991). n active contour models and balloons.
CVGIF: Image Understanding, 53(2):211–218.
Kass, M., Witkin, A., and Terzopoulos, D. (1988).
Snakes:active contour models. Int. J. Comp. Vision,
1(4):321–331.
McInerney, T. and Terzopoulos, D. (1995). Topologically
adaptable snakes. In Proc. Fifth International Conf.
on Computer Vision(ICCV’95), pages 840–845.
McInerney, T. and Terzopoulos, D. (1996). Deformable
models in medical image analysis: A survey. In Med.
Image Anal., volume 1.
Shirazi, M. N. and Kamakura, Y. (2010). Restructuring
centipedes and their applications to fast extraction of
structures in electron microscope tomography images.
In 3rd International Conference on Biomedical Engi-
neering and Informatics.
IVAPP 2012 - International Conference on Information Visualization Theory and Applications
718
