
DOWNSCALING AEROSOL OPTICAL THICKNESS TO 1 KM
2
SPATIAL RESOLUTION USING SUPPORT VECTOR REGRESSION
REPLIED ON DOMAIN KNOWLEDGE
Thi Nhat Thanh Nguyen
1
, Simone Mantovani
2,3
, Piero Campalani
4
and Gian Piero Limone
1
1
Department of Mathematics, University of Ferrara, Via Saragat 1, 44122, Ferrara, Italy
2
MEEO S.r.l., Via Saragat 9, 44122, Ferrara, Italy
3
SISTEMA GmbH, W
¨
ahringerstrasse 61, A-1090, Vienna, Austria
4
Department of Engineering, University of Ferrara, Via Saragat 1, 44122, Ferrara, Italy
Keywords:
Aerosol optical thickness, Downscaling, 1 km
2
spatial resolution, Support vector regression, MODIS, Local
monitoring, Air pollution, Remote sensing.
Abstract:
Processing of data recorded by MODIS sensors on board the polar orbiting satellite Terra and Aqua usually
provides Aerosol Optical Thickness maps at a coarse spatial resolution. It is appropriate for applications of
air pollution monitoring at the global scale but not adequate enough for monitoring at local scales. Different
from the traditional approach based on physical algorithms to downscale the spatial resolution, in this article,
we propose a methodology to derive AOT maps over land at 1 km
2
of spatial resolution from MODIS data
using support vector regression relied on domain knowledge. Experiments carried out on data recorded in
three years over Europe areas show promising results on limited areas located around ground measurement
sites where data are collected to make empirical data models as well as on large areas over satellite maps.
1 INTRODUCTION
Remote Sensing allows to measure physical proper-
ties of objects without actually being in contact with
them. Using devices installed on board aircrafts or
satellite platforms, Remote Sensing applied to the
Earth Observation makes it possible to monitor the
Earth-Atmosphere system through the analysis of the
interaction of radiation with matter. The signal re-
ceived by satellite optical sensors is the sum of sev-
eral contributions due to scattering, absorption, reflec-
tion and emission processes. Image processing tech-
niques and specific algorithms are applied on that in-
formation to extract (direct measurement) or estimate
(indirect measurement) the environmental parameters
and their characteristics which are used in a large va-
riety of applications for Earth Observation (Agricul-
ture, Atmosphere, Forestry, Geology, Land Cover and
Land Use, Mapping, Oceans and Coastal).
For Atmosphere applications focused on the Cli-
mate Change and on the human health, the Aerosol
Optical Thickness (AOT) has been recognized as
one of the most important atmospheric variables to
be monitored from local to global scale. AOT is
representative for the amount of particulates present
in a vertical column of the Earth’s atmosphere.
Aerosol concentration can be measured directly by
ground-based sensors or estimated by processing data
recorded by airborne instruments or by satellite-based
sensors. Ground measurements have usually high
accuracy and temporal frequency (hourly) but they
are representative of a limited spatial range around
ground sites. Conversely, satellite observation pro-
vides information at global scale with moderate qual-
ity and lower measurement frequency (daily).
MODerate resolution Imaging Spectrometer
(MODIS) is a multispectral sensor on-board the two
polar orbiting satellites Terra and Aqua, launched
in 1999 and 2002, respectively and operated by
the National Aeronautic and Space Administration
(NASA). These satellite sensors provide observations
nearly the entire globe on a daily basis, and repeat
orbits every 16 days. MODIS sensors perform
measurements of sectorial radiances in the solar to
thermal infrared spectrum region from 0.41 to 14.235
µm. Using MODIS-measured spectral radiances,
physical algorithms based on Look-Up Table (LUT)
approaches have used since 90s to generate the
230
Nhat Thanh Nguyen T., Mantovani S., Campalani P. and Piero Limone G. (2012).
DOWNSCALING AEROSOL OPTICAL THICKNESS TO 1 KM2 SPATIAL RESOLUTION USING SUPPORT VECTOR REGRESSION REPLIED ON
DOMAIN KNOWLEDGE.
In Proceedings of the 1st International Conference on Pattern Recognition Applications and Methods, pages 230-239
DOI: 10.5220/0003791302300239
Copyright
c
SciTePress

aerosol products for Land and Ocean areas in Collec-
tion 004 (Kaufman and Tanre, 1997) and following
improved releases (Collection 005 (Remer et al.,
2004), Collection 051 and the newest Collection 006
issued in 2006, 2008 and 2012, respectively).
Over the Land areas, the aerosol optical thickness
is derived using the Dense Dark Vegetation (DDV)
approach. Firstly, all cloudy pixels are removed by
cloud scanning process. After that, dark pixels are
identified by low reflectance values in the mid in-
frared channel 2.13 µm. Reflectance in 0.645, 0.466,
and 2.13 µm over dark pixels are used to derive
the optical thickness in those three channels. For
the inversion process, in Collection 005, parame-
ters of different aerosol models consisting of Con-
tinental, Neutral/Generic, Non-absorb/Urban Indus-
try, Absorbing/Heavy Smoke, Spheroid/Dust mod-
els are calculated and stored in LUT. The algo-
rithm assumes that aerosol properties over a targeted
pixel are presented by proper weightings of one fine-
dominated aerosol model and one coarse-dominated
aerosol model. Spectral reflectance from the LUT is
compared with MODIS-measured spectral reflectance
to find the best match that is the solution to the inver-
sion process.
Machine learning approaches applied in aerosol
optical thickness processing have recently been in-
vestigated and presented in various applications rang-
ing from classification of aerosol components (Ra-
makrishnan et al., 2005), prediction based on time
series data (Lu et al., 2002)(Osowski and Garanty,
2006)(Chen and Shao, 2008)(Siwek et al., 2008),
to estimation of aerosol content and properties from
different sensors (Okada et al., 2001)(Han et al.,
2006). Related to MODIS aerosol retrievals, pro-
posed approaches often follow a general frame-
work that applies machine learning techniques on
data collected by different instruments. Firstly, in-
tegrations of ground-based measurements AErosol
RObotic NETwork (AERONET) and data recorded
by satellite sensors (Multi-angle Imaging SpectroRa-
diometer (MISR) and MODIS (Xu et al., 2005) or
only MODIS (Vucetic et al., 2008)(Lary et al., 2009)
are made. After that, Neural Networks (NNs) or Sup-
port Vector Regression (SVR) techniques are applied
on integrated data to derive aerosol content and prop-
erties. This method proved efficiency in reducing pro-
cessing time (Okada et al., 2001), dealing with data
uncertainties (Vucetic et al., 2008)(Obradovic et al.,
2010), improving estimation accuracy (Xu et al.,
2005)(Vucetic et al., 2008)(Nguyen et al., 2010b),
flexibly updating new inversion models, and easily
extending to other types of sensors. However, the lim-
itations of this approach are the data dependence and
the complexity of the modeling process.
The best available spatial resolution provided by
MODIS standard aerosol products, up to now, is
10x10 km
2
which is adequate for monitoring at the
global scale but not fine enough at local scale. Sev-
eral researches have been aiming at deriving more de-
tailed aerosol information covering areas of 3x3 km
2
(Nguyen et al., 2010a), 1.5x1.5 km
2
(Oo et al., 2008),
or 1x1 km
2
(Li et al., 2005) to adapt the application
to local monitoring. These works have exploited the
physical algorithms to derive the finer spatial resolu-
tion maps of aerosol. Related to researches applying
machine learning techniques to improve MODIS op-
tical thickness retrieval as reviewed above, the 10x10
km
2
resolution was considered. Besides, most of ma-
chine learning technique proposals are tested in pixel
domain referred to as pixels around locations where
data are collected to make data models instead of a re-
ally map domain referred to as continuous pixels over
satellite maps.
In this article, we propose a methodology to derive
from MODIS Level 1B data aerosol optical thickness
at 1x1 km
2
over land using SVRs relied on domain
expert knowledge. This work aims at providing the
aerosol local monitoring from MODIS observations
and exploiting advantages of machine learning tech-
niques in deriving optical thickness. The proposed ap-
proach has to deal with two challenges which are (i)
a very large and noisy dataset as a result of the goal
to obtain the 100 times more detailed map (1x1 km
2
resolution in comparison with 10x10 km
2
resolution)
and (ii) the transition from pixel domain to map do-
main in which data models created by data collected
on sparse locations are applied on large and continu-
ous map areas. The proposed methodology was de-
veloped and tested on real data collected over Euro-
pean areas in three years from 2007 to 2009 and pre-
sented promising results.
The main contribution of our works is the proposal
of using SVR for downscaling AOT from MODIS.
The proposed methodology is able to deal with men-
tioned challenges and derived AOT at the 1x1 km
2
spatial resolution from MODIS data with satisfactory
prediction quality in comparison with both ground
AERONET values and standard MODIS AOT maps.
For the data modeling process, the contribution is the
usage of filtering and clustering techniques relied on
domain knowledge and applied before building SVR
models. It benefits in reducing data noises and also
in solving problems of large training datasets which
are very serious especially for high resolution satel-
lite data. The mentioned techniques are promising as
they exploited physical aspects of aerosol and satel-
lite measurements. Last but not least, the methodol-
DOWNSCALING AEROSOL OPTICAL THICKNESS TO 1 KM2 SPATIAL RESOLUTION USING SUPPORT
VECTOR REGRESSION REPLIED ON DOMAIN KNOWLEDGE
231
ogy was designed towards an application of MODIS
but it will be easy to apply and create new empirical
data models for other satellite sensors that implement
as new physical algorithms.
The article is organized as follows. The proposed
methodology including data description, data integra-
tion, filtering and clustering methods, SVR inversion
process, and the map prediction framework will be
described in Section 2. Experiments and results on
data modeling and validation on the map prediction
will be described and discussed in Section 3. Finally,
conclusions are given in Section 4, together with hints
about future works.
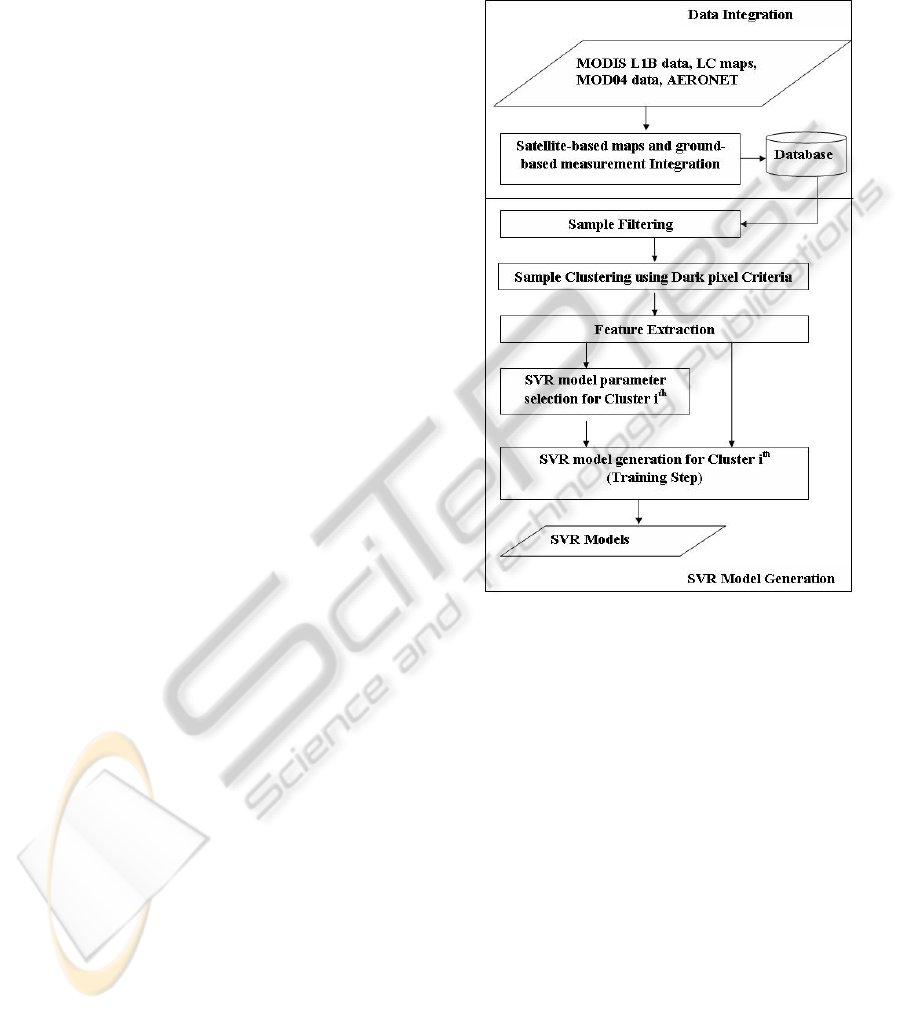
2 METHODOLOGIES
In this section, we present the methodologies to create
SVR models and to predict AOT maps from MODIS
data. Firstly, satellite-based data and ground-based
measurements in the areas of interest are collected.
Secondly, data from difference sources are integrated
to solve the differences of temporal and spatial reso-
lution. After that, filtering and clustering techniques
exploiting physical aspects of data are applied in order
to reduce noise and total amount of data, and to sepa-
rate them into groups having different characteristics.
In the fourth step, SVR is used to create data model
for each cluster of data. The flowchart of model gen-
eration is presented in Figure 1. Finally, in the map
prediction framework, aerosol maps at spatial resolu-
tion of 1 km
2
are derived from MODIS Level 1B data
using SVR models.
2.1 Data Collection
In this section, we describe the datasets used to de-
velop empirical data models as well as to input for
the map prediction framework. We collected the data
covering Europe in three years from 2007 to 2009 and
consisting of MODIS L1B data, MOD04 L2, Land
Cover (LC) map, and AERONET data Level 2.0.
MODIS L1B data acquired by MODIS sensors on
board the Terra and Aqua satellites present measure-
ments of a spectrum region from 0.415 to 14.235 µm
divided into 36 channels at 1 km, 500 m, and 250
m resolution at nadir. A scene covers an area on the
Earth surface of 2030 km in the direction of the satel-
lite orbit and of “1354 km” of non-uniform width (i.e.
the real pixel size projected on the earth far away
from nadir is larger than those at nadir because of
the influence of instrument scan and the earth’s cur-
vature) (Ren et al., 2010). The spectral reflectance
are calibrated, geo-located and provided in products
named MOD02 for Terra. In addition, the correspond-
ing geo-location product containing geodetic coordi-
nates, ground elevation, solar and satellite zenith and
azimuth angles for each 1 km sample is provided to-
gether with L1B data, known as MOD03 for Terra.
Figure 1: SVR approach for the AOT inversion problem.
MOD04 L2 is the aerosol products derived by
MODIS software package called Collection 005.
MOD04 L2 characterized by spatial resolution of
10x10 km
2
provide AOT estimations at seven wave-
lengths (0.470, 0.550, 0.670, 0.870, 1.240, 1.630
and 2.130 µm) over ocean and three wavelengths
over continental areas (0.470, 0.550 and 0.670 µm)
together with respective geometry information and
other various parameters. MOD04 L2 is used in val-
idation of SVR technique in both pixel and map do-
mains.
Land Cover maps present information of the Earth
surface which is used as an attribute contributed to
data modeling and as a mask for the cloud screening
process before applying aerosol retrieval algorithms.
LC maps are produced by a spectral rule-based soft-
ware system (MEEO, 2011) that provides 57 different
classes, out of which 40 refer to different land types.
AERONET is the global system of ground-
based Remote Sensing aerosol network established by
NASA and PHOTONS (University of Lille 1, CNES,
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
232

and CNRS-INSU) (NASA, 2011). Aerosol Optical
Thickness is measured by CIMEL Electronique 318A
spectral radiometers, sun and sky scanning sun pho-
tometers in various wavelengths: 0.340, 0.380, 0.440,
0.500, 0.670, 0.870, 0.940, and 1.020 µm, in intervals
of 15 minutes in average. After data processing steps,
cloud-screened and quality-assured data are stored
and provided as Level 2.0. In our work, AERONET
data Level 2.0 are collocated in space and synchro-
nized in time with satellite-based data, and then con-
sidered as target values for SVR models.
2.2 Data Integration
As described in the previous section, data are col-
lected from different sources have different temporal
and spatial resolutions which can be solved by the in-
tegration process. Satellite data include MODIS L1B
data (MOD02 and MOD03) and LC maps at 1 km
2
resolution, MODIS aerosol products (MOD04 L2) at
10 km
2
resolution. Ground-based data are obtained
from AERONET distributed sites.
All satellite maps are acquired at the same time
and location, thus, only re-sampling process is ap-
plied to refine MOD04 L2 products to 1 km
2
spa-
tial resolution. However, satellite-based and ground-
based data have different temporal resolution (every
day versus every 15 minutes, respectively) and dif-
ferent spatial resolution (1354 by 2030 of 1-km-pixel
maps in comparison with site points). Therefore,
we apply the time and location constrains to make
data integration, as proposed in (Ichoku et al., 2002).
Satellite data are considered if pixels are located over
land, cloudy-free and their distances from AERONET
sites are within radius R of 30 km. Meanwhile, the
contemporaneous measurements of AERONET in-
struments are selected and averaged within a tempo-
ral window T of 30 minutes around the satellite over-
passes. The integration is illustrated in Figure 2.
Satellite-based and ground-based integration is
applied to create data samples for data modeling
process. The usage of integrated data aims at im-
proving the aerosol retrieval quality by utilizing the
high accuracy of ground measurements as validated
in (Xu et al., 2005)(Vucetic et al., 2008)(Lary et al.,
2009)(Obradovic et al., 2010)(Nguyen et al., 2010b).
A sample is a combination of a satellite pixel’s at-
tributes and an arithmetic mean of AERONET AOT
values that satisfied collocation and time synchro-
nization constrains. A samples features consist of
the AERONET AOT at 0.553 µm, latitude, longi-
tude, sensor zenith angle, solar zenith angle, relative
azimuth angle, scattering angle, four reflectances at
0.646. 0.466, 1.243, and 2.119 µm, and land cover
class. The feature selection is replied on inputs of
LUT in the MODIS algorithm.
Figure 2: Spatio-temporal window for extracting satellite-
and ground-based measurements.
AERONET AOT at 0.553 µm (AOT
553
) is not
measured directly from AERONET sites and it is cal-
culated using log-linear interpolation from two AOT
values of the closest channels 0.500 and 0.670 µm (
AOT
500
and AOT
670
, respectively), as follows:
AOT
553
= e
log(AOT
500
)+(553−500)
log(AOT
670
)−log(AOT
500
)
670−500
(1)
The scattering angle Θ was defined as:
Θ = cos
−1
(−cosθ
0
cosθ + sinθ
0
sinθcos φ) (2)
where θ
0
, θ and φ are the solar zenith, sensor view
zenith and relative azimuth angles, respectively.
2.3 Filtering and Clustering Techniques
The proposed filtering and clustering techniques are
based on physical aspects of aerosol and satellite
measurements. The Top Of Atmosphere (TOA) re-
flectance ρ
∗
at a particular wavelength λ , measured
by a satellite, can be approximated by
ρ
∗
λ
= ρ
a
λ
(θ
0
, θ, φ) +
F
dλ
(θ
0
)T
λ
(θ)ρ
s
λ
(θ
0
, θ, φ)
1 − s
λ
p
s
λ
(θ
0
, θ, φ)
(3)
where ρ
a
λ
is the atmospheric “path reflectance”, F
dλ
is
the “normalized downward flux” for zero surface re-
flectance, T
λ
is the “upward total transmission” into
the satellite field of view, s
λ
is the “atmospheric
backscattering ratio” and ρ
s
λ
is the angular “surface
reflectance”. They are functions of solar zenith an-
gle, satellite zenith angle, and solar/satellite relative
azimuth angles (θ
0
, θ and φ, respectively).
The equation (3) presents that a satellite mea-
sured reflectance is mainly contributed from aerosol
DOWNSCALING AEROSOL OPTICAL THICKNESS TO 1 KM2 SPATIAL RESOLUTION USING SUPPORT
VECTOR REGRESSION REPLIED ON DOMAIN KNOWLEDGE
233

reflectance (i.e. path reflectance ρ
a
λ
) and surface re-
flectance (i.e. ρ
s
λ
). The functions F
dλ
, T
λ
and s
λ
also
depend on aerosol optical thickness though for small
surface reflectance they are less important. In phys-
ical algorithm, the path reflectance is separated and
used to derive aerosol optical thickness using built-
in parameters stored in LUT. The contribution of ρ
∗
from path reflectance is larger on short wavelengths
and low values of surface reflectance. Therefore, the
error for deriving AOT from this approximation is
smaller for dark surfaces. Dark pixels are determinate
by the mid-infrared channels (2.1 or 3.8 µm) because
those wavelengths are not effect by aerosol in the at-
mosphere.
Related to the filtering technique applied on in-
tegrated datasets, we made an assumption that dark
pixels values are confident to select and match with
AERONET measurements. Then, integrated data are
grouped by acquisition time and AERONET location,
referred to as a combination set. In each combina-
tion set, samples are sorted on the mid infrared band
2.13 µm and then, 50% of brightest and 20% of dark-
est pixels are discarded. This filtering process aims at
removing noisy data and chooses pixels towards dark-
ness for SVR model generation.
The proposed cluster technique is replied on pri-
ority of criteria applied over land surfaces exclud-
ing water, clouds, ice and snow to choose pixels for
aerosol derivation in the physical approach (Kaufman
and Tanre, 1997). The priorities are defined as fol-
lows:
first priority for 0.01 6 ρ
∗
2.1
6 0.05
second priority for ρ
∗
3.8
6 0.025
third priority for 0.01 6 ρ
∗
2.1
6 0.10
fouth priority for 0.01 6 ρ
∗
2.1
6 0.15
(4)
where ρ
∗
2.1
and ρ
∗
3.8
are TOA reflectance at wavelength
2.1 and 3.8 µm. The quality of the derivation is ex-
pected to decrease with the priority rank.
We proposed the clustering technique based on the
first, third, and fourth priorities. Samples are sepa-
rated into four groups based on thresholds in the mid-
IR band 2.13 µm (from 0.01 to 0.05, from 0.05 to
0.10, from 0.10 to 0.15, and larger than 0.15). It aims
at specializing SVR models for particular data groups.
2.4 Support Vector Regression for
Inversion Process
SVR is applied for each cluster to create a correspond-
ing data model. This takes advantages of the divide-
and-conquer strategy and therefore, it is easier to con-
trol, improve, and evaluate the SVR performance on
each cluster.
The inversion problem is stated as follows. Given
a training dataset including l samples:
{(x
1
, y
1
), . . . , (x
l
, y
l
)} ⊂ X × ℜ (5)
where X denotes the space of the input patterns (i.e.
X ⊂ ℜ
d
), the target y
i
refers to as AERONET AOT
at 0.553 µm. The input is expressed as a record of
latitude, longitude, sensor zenith angle, solar zenith
angle, relative azimuth angle, scattering angle, re-
flectance at 0.646 µm, reflectance at 0.466 µm, re-
flectance at 1.243 µm, reflectance at 2.119 µm, and
land cover class. The ε-SVR, firstly introduced by
(Vapnik, 1995), is to find the optimal function f (x)
that has at most ε deviation from the actually obtained
target y
i
from the training data. The ε-SVR with ep-
silon loss function and Radial Basic Function (RBF)
kernel provided by LIBSVM (Chang and Lin, 2011)
is used in our method.
The SVR algorithm is well known by generation
performance which can be achieved by good settings
of the ε-SVR parameters (i.e. regularization C, ε of
the lost function, and p in the kernel function RBF).
Because of high cost in cross validation for param-
eter selection on large datasets, we estimated those
parameters using a practical approach proposed in
(Cherkassky and Ma, 2004).
Following this method, the parameter C can be
chosen equal to the range of output y
i
values of train-
ing data. In order to limit the sensitiveness of C to
possible outliers in the training data, C is proposed as
C = max(| ¯y + 3σ
y
|, | ¯y − 3σ
y
|) (6)
where ¯y and σ are the mean and the standard deviation
of the y values of training data.
Parameter ε is estimated using the assumption that
the value of ε should be proportional to the input noise
variance. Based on the empirical results, the practical
ε is proposed as:
ε = tσ
r
lnl
l
(7)
where t, l and σ are the empirical dependency on the
number of training data (proposed as 3), the number
of samples in training data and the variance of addi-
tive noise δ, respectively. δ is described by:
y = f (x) + δ (8)
where δ is independent and identically distributed
(i.i.d) zero mean random noise, x is a multivariate in-
put and y is scalar output, f (x) is regression function.
We denotes
¯
σ as the practical noise variance esti-
mated from training data which will be used as σ in
(7) for ε selection:
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
234
¯
σ =
l
1
5
k
l
1
5
k − 1
1
l
l
∑
i=1
(y
i
− ¯y
i
)
2
(9)
where k is window size, proposed in the 2 - 6 range, of
k-nearest-neighbours regression, ¯y
i
is a local average
of training data estimated from k nearest neighbours.
The width parameter p in RBF kernel is presented
as follows:
K(x
i
, x
j
) = e
−
kx
i
−x
j
k
2
2p
2
(10)
where x
i
is a training data.
p is appropriately selected to reflect the input range
of the training/test data. For the multivariate d-
dimensional problem, p is proposed to calculate as
p
d
∼ (0.1 − 0.5) where d input variables are pre-
scaled to [0, 1] range.
The parameter selection in our approach is carried
out on three steps:
• Initializing values of C, ε and p from training data
using the methodology described above.
• Tuning parameter ε by changing empirical de-
pendency parameter t in (7) to 30 (proposed as
3). It is due to our large training dataset, very
small target values, and repeated target values on
many samples as a result of integration process
in which many satellite pixels are matched to one
AERONET sites. Those lead to very small val-
ues of ε. The changing reduced number of sup-
port vectors to approximately 40% - 50% of total
number of training data and did not make strong
effect on Mean Square Error (MSE) received in
the cross-validation process.
• Tuning p in order to avoid the over-fitting
when data models built on scatter data around
AERONET site are applied in map domain. This
step is based on two assumptions: (i) the fine
aerosol prediction at 1 km
2
is not more accurate
than the coarse aerosol prediction at 10 km
2
be-
cause of data noise, and (ii) the prediction errors
increase by cluster priorities as mention in Sec-
tion 3.2. In implementation, we calculate MSE
of satellite MODIS AOT values and AERONET
data in the current working dataset. The MSE for
SVR models are selected from the range of clus-
ter 1 and cluster 2 whose pixels are considered
to be good for AOT derivation (i.e. from 0.060
to 0.075) for tuning p . The MSE on cluster 3
and 4 are large (∼ 0.1) and then are skipped be-
cause they lead to low accuracy of SVR model to
ground-truth AERONET values.
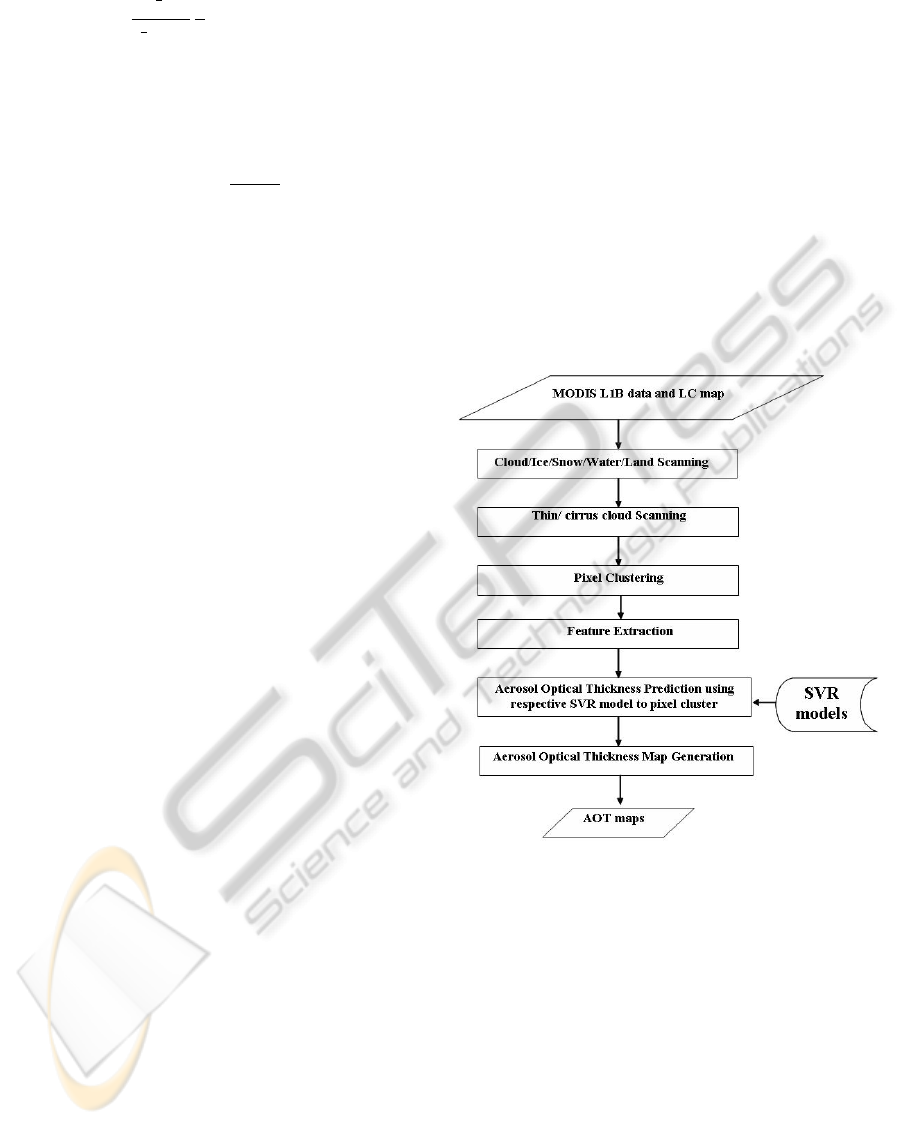
2.5 Map Prediction Framework
In this section, we introduce the map prediction
framework to derive AOT maps from MODIS L1B
data using generated SVR models. The flowchart is
presented in Figure 3. The LC maps, produced by
SOIL MAPPER (MEEO, 2011), distinguish types of
pixels and perform the first cloud screening. This is
due to the fact that aerosol estimation algorithm over
land is applied on pixels of land instead of cloud,
water, ice, snow. Because the AOT estimation on
cloud contamination or bright pixels from satellite re-
flectance is not correct, we apply the second cloud
screening process using the cloud masking proce-
dure developed for retrieval of aerosol properties by
MODIS (Remer et al., 2004).
Figure 3: The map prediction framework.
The second cloud screening algorithm is based on
spatial variability of reflectances on TOA in the vis-
ible wavelengths. Clouds show the high spatial vari-
ability in the range from hundred meters to few kilo-
meters, while aerosol in general is very homogeneous.
The original algorithm is proposed in (Martins et al.,
2009) for cloud masking over ocean but this proce-
dure has been extended to land and applied in both
aerosol algorithms in Collection 005. The land algo-
rithm generates a cloud mask using spatial variabil-
ity of the 0.47 and 1.38 µm channels with thresholds
0.0025 and 0.003, respectively. If the standard devia-
tion calculated for each group of 3 x 3 pixels is greater
than the corresponding threshold, then the area of the
entire 3 x 3 pixel box is considered as clouds. In
DOWNSCALING AEROSOL OPTICAL THICKNESS TO 1 KM2 SPATIAL RESOLUTION USING SUPPORT
VECTOR REGRESSION REPLIED ON DOMAIN KNOWLEDGE
235
addition, tests on visible channel reflectance thresh-
olds are carried out. If the reflectance at 0.47 µm and
1.38 µm are greater than 0.4 and 0.025, respectively,
the pixel is considered as a cloudy pixel. In our ap-
proach, all calculations are applied at 1 km
2
resolu-
tion for both 0.47 µm and 1.38 µm channels instead
of 500 m and 1 km
2
resolutions, respectively as in the
Collection 5 algorithm.
After cloud scanning processes, selected pixels
are grouped into four clusters in order to apply the
corresponding SVR data model to predict aerosol op-
tical thickness. The final process collects predicted
pixels, integrates with geo-information and then gen-
erates the AOT map.
3 EXPERIMENTS AND RESULTS
3.1 Pixel Domain
In this section, we present experiments on pixel do-
main referred to as pixels collected in areas around
AERONET sites and used to make and test SVR mod-
els.
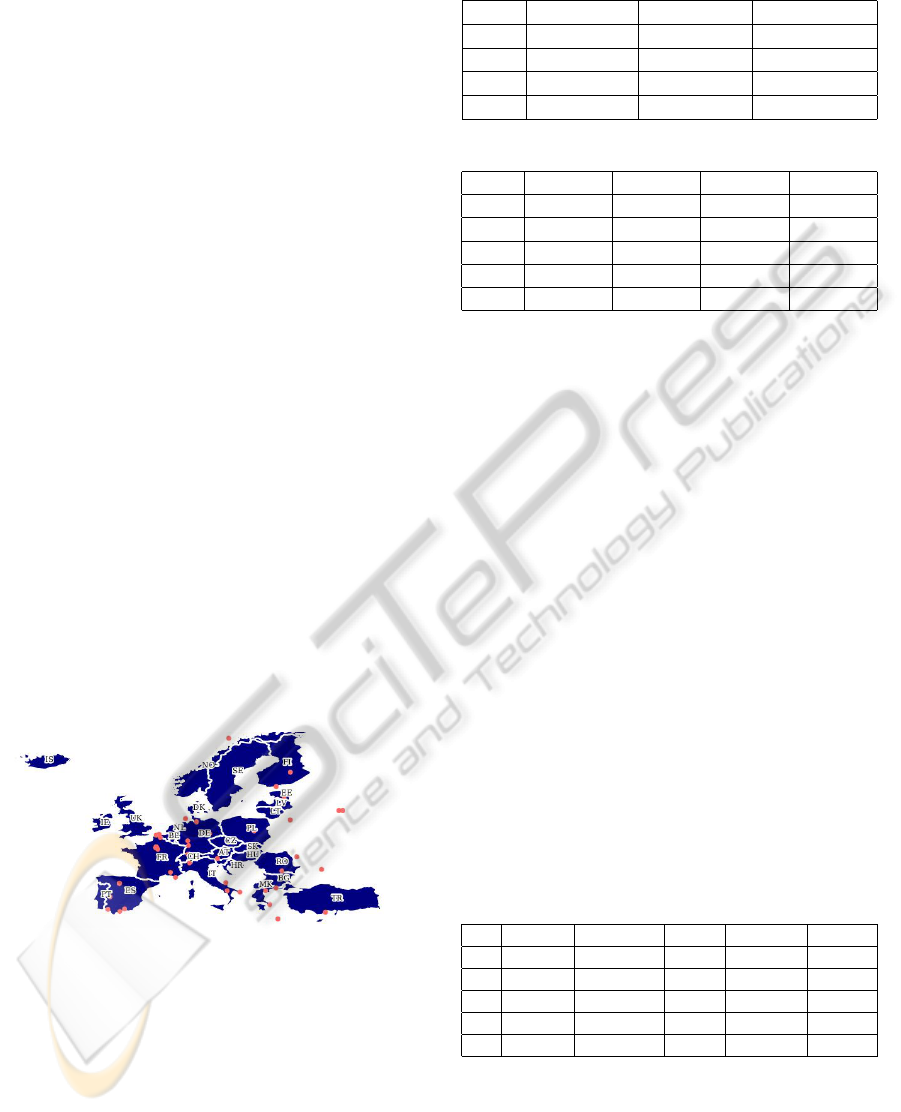
The data, covering Europe in three year from 2007
to 2009, consist of MODIS L1B data and LC map
at 1 km
2
resolution, MOD04 L2 at 10 km
2
resolu-
tion, and AERONET data Level 2.0. After integrating
satellite-based and ground-based measurements, we
obtained data, called samples afterward, at 35, 42 and
36 AERONET sites for 2007, 2008, and 2009, respec-
tively. The sites distribution is presented in Figure 4.
Figure 4: Distribution of AERONET sites over the Europe
area used in data modeling.
The statistics on total dataset before and after ap-
plication of filter is presented in detail in Table 1. 30%
out of the total 3,570,245 samples is remained after
filtering. In the next step, those samples are grouped
into four groups based on proposed thresholds of the
mid-infrared band 2.13 µm as described in the Section
2.3. As shown in Table 2, cluster 1, 2 and 3, consid-
ered as having good pixels for AOT estimation, hold
most of data, i.e. 22.53%, 55.94% and 16.98% of to-
tal, respectively.
Table 1: Statistics on total dataset.
Year # AER site # Raw data Filtered data
2007 35 1,331,210 402,871
2008 42 1,242,157 376,323
2009 36 996,878 301,981
# 3,570,245 1,081,175
Table 2: Statistics on different clusters.
Year # Clus.1 # Clus.2 # Clus.3 # Clus.4
2007 86,593 223,625 72,479 20,136
2008 95,875 207,968 60,822 11,584
2009 61,167 173,261 50,299 17,169
# 243,635 604,854 183,600 48,889
% 22.53% 55.94% 16.98% 4.52%
For each cluster, 10,000 random samples are se-
lected for each year to create training datasets, while
the left data are used as testing datasets. The evalua-
tion was carried out on each cluster using Mean Error
(ME), Root Mean Square Error (RMSE) and COR-
relation coefficient (COR) all of which are calculated
from AOT values obtained by different methods.
Table 3 shows the accuracy of SVR predictors
in comparison with AERONET measurements on the
pixel domain. In this experiment, all estimated AOT
values using SVR are matched directly to correspond-
ing AERONET values and validated. Using the pro-
posed approach, four clusters achieve acceptable ac-
curacy (COR ∼ 0.78 and RMSE ∼ 0.070). How-
ever, SVR models slightly underestimate AOT values,
represented by negative ME. The general results on
COR, RMSE, and ME, calculated by proportion of
quantity of pixels in each cluster to the total number
of pixels, are 0.782, 0.0694, and -0.0495, respectively.
These results are considered as acceptable for AOT
estimation at 1 km
2
of resolution where inputs are
very variant and noisy in comparison with data used
in coarser spatial resolution application (e.g. 10x10
km
2
of MODIS AOT).
Table 3: SVR prediction on different clusters.
C. # SV # Testing COR RMSE ME
1 12,131 213,635 .795 .061150 -.0045
2 13,012 574,854 .780 .069747 -.0048
3 15,451 153,600 .775 .078532 -.0056
4 16,506 18,889 .774 .077550 -.0080
# 960,978 .782 .069393 -.0049
Another experiment is carried out on three pairs
of AOT, that is, SVR AOT and AERONET AOT
(SVR - AER), MOD04 L2 AOT and AERONET AOT
(MODIS - AER), SVR AOT and MOD04 L2 AOT
(SVR - MODIS). As described in Section 2.4, we cre-
ated SVR models with MSE of SVR predicted values
and AERONET target bounded by MSE of MODIS
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
236
AOT and AERONET AOT in order to avoid over-
fitting. Therefore, the SVRs will have similar perfor-
mance as MODIS algorithm on good pixels (clusters
1 and 2) in theory. This experiment aims at investigat-
ing the relationship between SVR AOT and MODIS
AOT around AERONET site to explain the results of
the next validation in which we predict and compare
directly AOTs on map domain.
In the second experiment, all SVR AOT and
MODIS AOT are aggregated by acquisition time and
AERONET site, then averaged and validated to cor-
responding AERONET values. This method will give
more stable validation results when data at different
spatial resolutions are compared.
Table 4 presents the obtained results. Firstly,
the assumption about prediction quality decreased by
cluster, as mentioned in Section 2.3, is presented cor-
rectly in this experiment. For both SVR and MODIS
algorithm, the correlation of AOT values (COR)
decreases while errors (RMSE) increases gradually
from cluster 1 to cluster 4.
Table 4: Comparison among aggregated SVR AOT, aggre-
gated MODIS AOT and AERONET AOT for cluster 1, 2, 3,
4 (top to bottom).
# SVR - AER MODIS - AER SVR - MODIS
COR RMSE COR RMSE COR RMSE
2317 .778 .0633 .802 .0641 .858 .0575
4555 .809 .0722 .825 .0757 .841 .0763
1968 .791 .0776 .765 .1003 .728 .1065
547 .694 .0785 .626 .1041 .375 .1186
The prediction errors are similar to MODIS AOT
and SVT AOT on cluster 1 and 2 (RMSE ∼ 0.064
and 0.072, respectively). However, SVR AOT are
more accurate than MODIS AOT on clusters 3 and
4 (RMSE = 0.077 and 0.078 vs. 0.100 and 0.104).
As the result, SVR AOT and MODIS AOT are com-
parable on cluster 1 and 2 (COR ∼ 0.858 and 0.841,
RMSE ∼ 0.057 and 0.076, respectively) but large dif-
ferent on clusters 3 and 4 (COR ∼ 0.728 and 0.375,
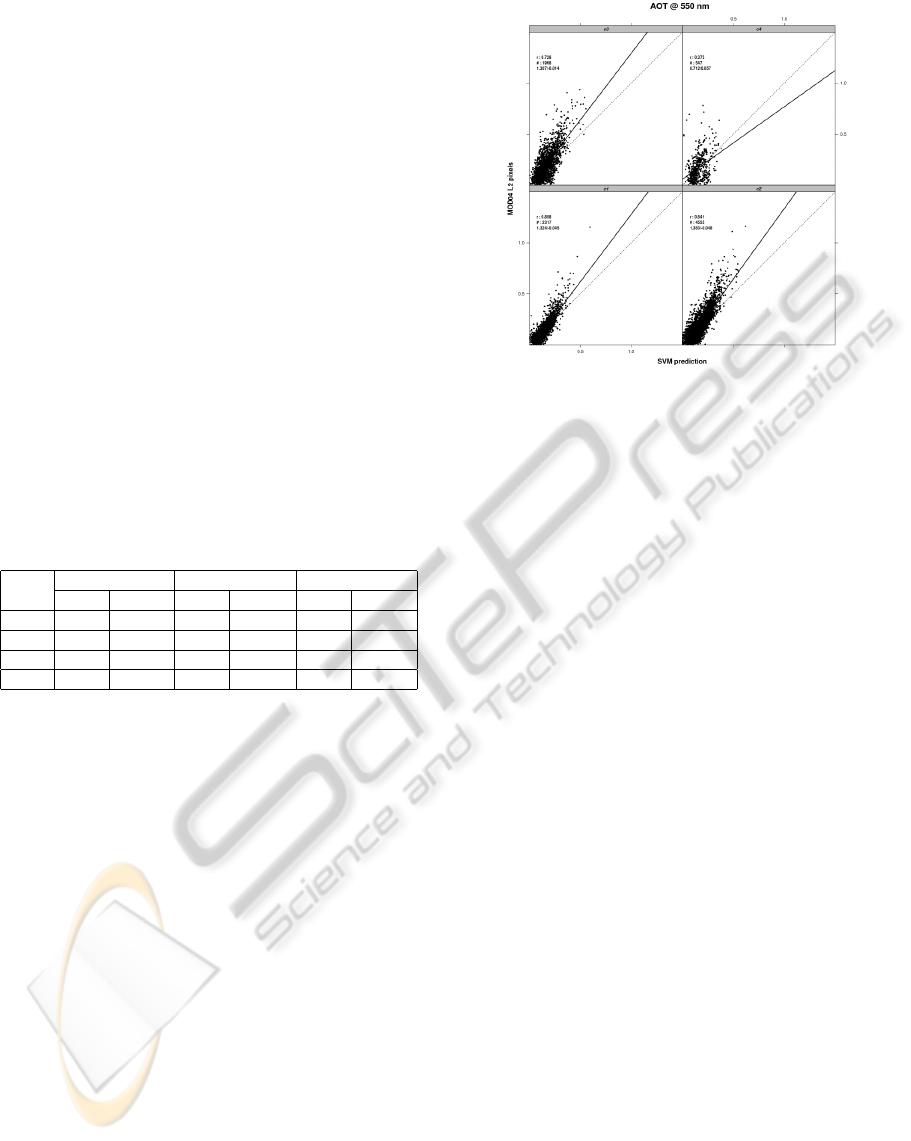
RMSE ∼ 0.106 and 0.118, respectively). The corre-
lation between SVR AOT and MODIS AOT is pre-
sented in the aggregated AOT scatter plot in Figure 5.
The relationship is worst on the cluster 4.
3.2 Map Domain
Map domain refers to all cloud-free pixels on im-
ages recorded by MODIS. The experiment carried out
in map domain aims at evaluating quality of SVR
models when they are used to derived AOT map
from MODIS L1B data. The validation of algorithms
working on map domain, up to now, is still a chal-
lenging problem because there are no confident tar-
get values for comparison. MOD04 L2 maps, con-
Figure 5: The scatter plot between SVR AOT and MODIS
AOT for cluster 1, 2, 4 and 3 (right-left, bottom-top order).
sidered as one of the best products for aerosol mon-
itoring at global scale nowadays, are used in our ex-
periment. However, as shown in the previous section,
re-sampled MODIS AOT also presents low quality in
comparison with ground truth AERONET AOT for
some certain cases (e.g. pixels of cluster 4).
We collected one map per month in three years
from 2007 to 2009 covering the area of Italy as il-
lustrated in Figure 6. Thus, the validation dataset
consists of 36 images. After applying the map pre-
diction framework, as presented in the section 2, we
received 36 AOT maps at 1 km
2
spatial resolution.
Corresponding MOD04 L2 maps are collected and
re-sampled into 1 km
2
maps by simply dividing one
10x10 km
2
pixel to one hundred of 1x1 km
2
pixels
with same AOT values. Since the algorithms work on
different spatial resolutions and use different method-
ologies for scanning good pixels, the two AOT maps
are not completely overlapped. Therefore, the COR
and RMSE are calculated only on match pixels which
have both SVR AOT and MODIS AOT. An illustra-
tion of AOT map estimated by our SVR and MODIS
algorithm is shown in Figure 7.
Table 5 presents the numerical results of the ex-
periment on validation datasets. SVR AOT of clus-
ters 1 and 2, occupying a big quantity of data (41.72%
and 44.74%, respectively), have small errors and good
correlation in comparison with MODIS AOT (COR
∼ 0.78, RMSE ∼ 0.057). The worst case hap-
pens to cluster 4 with COR = 0.401 and RMSE =
0.1213. Regarding the validation between SVR AOT
and MODIS AOT in pixel domain, obtained results
are generally consistent. In details, the decrease of
COR can be observed in clusters 1, 2, and 3 while
RMSE is slightly increase, especially on cluster 3.
DOWNSCALING AEROSOL OPTICAL THICKNESS TO 1 KM2 SPATIAL RESOLUTION USING SUPPORT
VECTOR REGRESSION REPLIED ON DOMAIN KNOWLEDGE
237
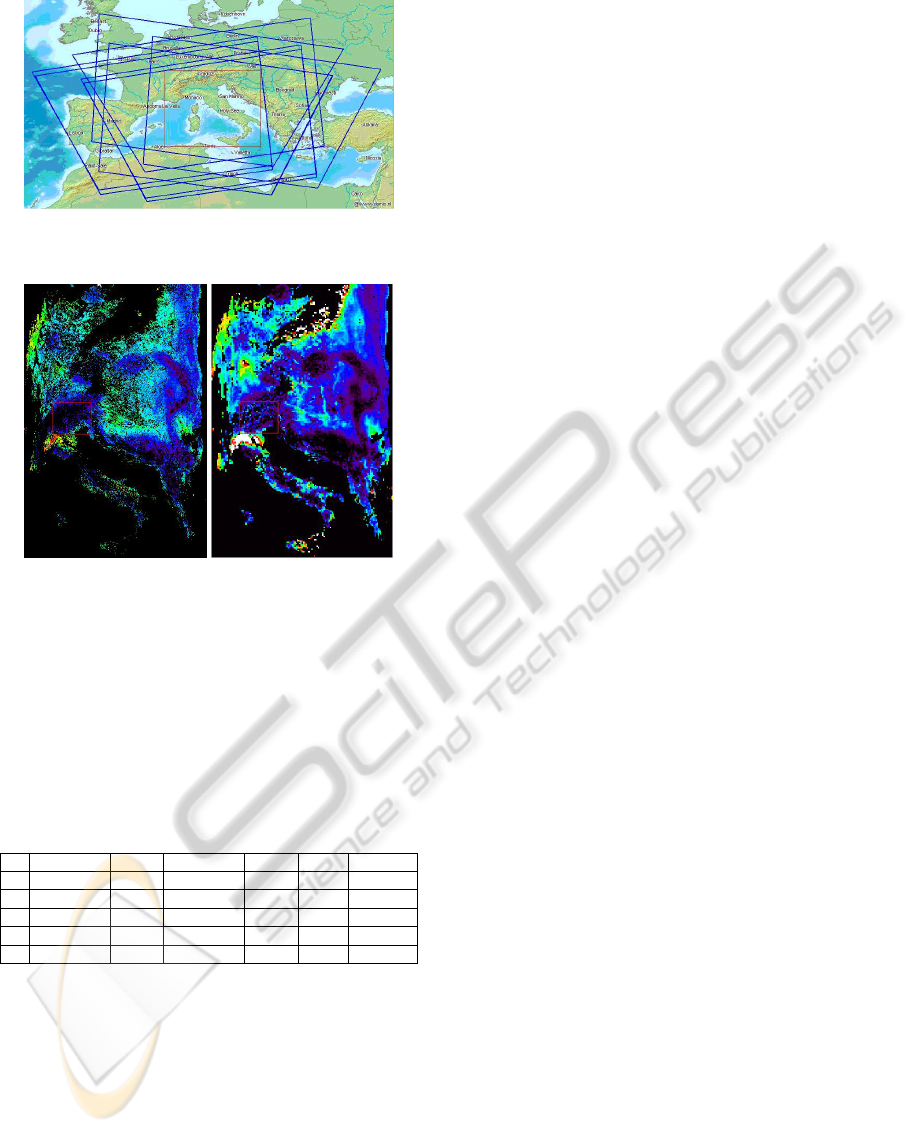
Figure 6: Illustration of MODIS L1B maps covering our
area of interest (the red square) in June 2008.
Figure 7: SVR AOT map (left) and re-sample MODIS AOT
map (right) for the dataset 20072660955005.
The difference of validation dataset and aggregation
and instance comparison can be explained for this sit-
uation. The general COR and RSME are moderate
and acceptable (0.769 and 0.0613, respectively).
Table 5: SVR MODIS validation for different clusters on
the map domain (C: cluster, #T: total number of pixels,
%T: percentage of cluster pixels on total, #N: number of
matched pixels, %N: percentage of matches on total num-
ber of cluster)
C #T %T #M %M COR RMSE
1 3,003,802 41.72 2,393,443 83.71 .782 .053846
2 3,221,464 44.74 3,070,472 91.62 .792 .061518
3 712,496 9.89 685,974 80.15 .684 .075537
4 262,812 3.65 126,675 46.64 .401 .121253
7,200,574 6,276,564 75.28 .769 .061330
The map domain validation results are various for
different datasets but following conclusions can be in-
ferred. Firstly, the scanning of good pixels in our map
prediction framework sweeps out many pixels of the
cluster 3 and 4 because strictly constrains are applied,
which is shown by a smaller amount of their pixels
in compare with cluster 1 and 2. However, this pro-
cess is necessary when estimation is carried out di-
rectly on values of 1 km
2
pixel in stead of averaged
values of good pixels at 500 m selected in a box sized
10x10 km
2
as in MODIS algorithm. Secondly, the
proposed SVR methodology performs well on most
pixels of cluster 1 and 2, presented by good COR and
low RMSE. Finally, the algorithm seems not work sta-
bly on pixels of the cluster 3. Some datasets have low
COR in comparison with MODIS AOT. Also, the bad
results are observed in pixels of the cluster 4. In fact,
SVR models are built on AERONET AOT targets. As
shown in the previous experiments, the relationship
between SVR AOT and MODIS AOT is not really
good for the cluster 3 and worse for cluster 4 in the
pixel domain. More investigation on pixels of cluster
3 and 4 should be done in both physical and inversion
algorithm aspects.
4 CONCLUSIONS
In this article, we proposed the methodology to esti-
mate aerosol optical thickness at 1 km
2
from MODIS
L1B data using SVR relied on domain knowledge. In
the proposed approach, the satellite-based data and
ground-based measurements over areas of interest are
collected and integrated using temporal and spatial
constrains. After that, filtering and clustering tech-
niques are applied in order to reduce noise and total
amount of data, and to separate them into four groups
having different characteristics. Then, SVR technique
is applied to create corresponding data models. Fi-
nally, in the prediction framework, aerosol maps at
spatial resolution of 1 km
2
is derived from MODIS
L1B data using SVR models retrieved in the previous
step.
Experiments were carried out on data from 2007
to 2009, covering European areas, in both pixel and
map domain. The evaluation results show that the
proposed approach deals well with two mentioned ar-
guments: (i) a very large and noisy dataset and (ii)
the movement from pixel domain to map domain,
presented as good quality of SVR AOT at 1 km
2
of
resolution in comparison with values measured by
AERONET and MODIS algorithm. Advantages of
the usage of the cluster technique are proved when
specific SVR models are created for different groups
of data. Thus, the modeling of large and variant
dataset is controllable and more effective. As a result,
good and bad aerosol predictors using SVR models
are pointed out, and therefore, investigation and im-
provement will be done further.
In future, we will focus on estimation of AOT in
map domain. The inversion algorithms for spatial
data will be investigated more deeply. Also, the val-
idation will be extended on other areas. Application
of the proposed methodology on data recorded by dif-
ferent satellite sensors will be aimed at.
ICPRAM 2012 - International Conference on Pattern Recognition Applications and Methods
238

REFERENCES
Chang, C. and Lin, C. (2011). LIBSVM: A Library for
Support Vector Machines.
Chen, Q. and Shao, Y. (2008). The Application of Im-
proved BP Neural Network Algorithm in Urban Air
Quality Prediction: Evidence from China. In Proceed-
ing of 2008 IEEE Pacific-Asia Workshop on Computa-
tional Intelligence and Industrial Application (PACIIA
2008), pages 160–163.
Cherkassky, V. and Ma, Y. (2004). Practical Selection of
SVM Parameters and Noise Estimation for SVM Re-
gression. In Neural Networks, volume 17, pages 113–
126.
Han, B., Vucetic, S., Braverman, A., and Obradovic, Z.
(2006). A Statistical Complement to Deterministic Al-
gorithms for the Retrieval of Aerosol Optical Thick-
ness from Radiance Data. In Engineering Applica-
tions of Artificial Intelligence, volume 19, pages 787–
795. Pergamon Pess.
Ichoku, C., Chu, D., Mattoo, S., Kaufman, Y., Remer, L.,
Tanr, D., Slutsker, I., and Holben, B. (2002). A spatio-
temporal approach for global validation and analysis
of MODIS aerosol products. In Geophysical Research
Letter, volume 29, pages 1–4.
Kaufman, Y. J. and Tanre, D. (1997). Algorithm for re-
mote sensing of tropospheric aerosol from modis. In
MODIS ATBD. NASA.
Lary, D., Remer, L., MacNeill, D., Roscoe, B., and Par-
adise, S. (2009). Machine Learning Bias Correction of
MODIS Aerosol Optical Depth. In IEEE Geoscience
and Remote Sensing Letters, volume 4, pages 694–
698.
Li, C., Lau, A., Mao, J., and Chu, D. (2005). Retrieval,
Validation, and Application of the 1-km Aerosol Op-
tical Depth from MODIS Measurements over Hong
Kong. In IEEE Transactions on Geoscience and Re-
mote Sensing, volume 43, pages 2650–2658.
Lu, W., Wang, W., Leung, A., Lo, S., Yuen, R., Xu, Z., and
Fan, H. (2002). Air Pollutant Parameter Forecasting
Using Support Vector Machine. In Proceeding of the
2002 International Joint Conference on Neural Net-
work (IJCNN02), pages 630–635.
Martins, J., Tanr, D., Remer, L., Kaufman, Y., Matto, S.,
and Levy, R. (2009). MODIS cloud screening for
remote sensing of aerosols over oceans using spa-
tial variability. In Geophysical Research Letters, vol-
ume 29.
MEEO, M. E. E. O. (2011). SOIL MAPPER
R
.
NASA (2011). AErosol Robotic Network (AERONET).
Nguyen, T., Mantovani, S., and Bottoni, M. (2010a). Es-
timation of Aerosol and Air Quality Fields with PM
MAPPER An Optical Multispectral Data Processing
Package. In ISPRS TC VII Symposium 100 year IS-
PRS, volume XXXVIII(7A), pages 257–261.
Nguyen, T., Mantovani, S., Campalani, P., Cavicchi, M.,
and Bottoni, M. (2010b). Aerosol Optical Thickness
Retrieval from Satellite Observation Using Support
Vector Regression. In Progress in Pattern Recogni-
tion, Image Analysis, Computer Vision, and Appli-
cations - 15th Iberoamerican Congress on Pattern
Recognition (CIARP2010), pages 492–499. Springer.
Obradovic, S., Das, D., Radosavljevic, V., Ristovski, K.,
and Vucetic, S. (2010). Spatio-Temporal Characteri-
zation of Aerosols through Active Use of Data from
Multiple Sensors. In ISPRS TC VII Symposium 100
year ISPRS, volume XXXVIII(7B), pages 424–429.
Okada, Y., Mukai, S., and Sano, I. (2001). Neural Network
Approach for Aerosol Retrieval. In IEEE 2001 Inter-
national Geoscience and Remote Sensing Symposium
(IGARSS01), volume 4, pages 1716–1718.
Oo, M., Hernandez, E., Jerg, M., Moshary, B., and Ahmed,
S. (2008). Improved MODIS Aerosol Retrieval Using
Modified VIS/MIR Surface Albedo Ratio over Urban
Scenes. In IEEE 2008 International Geoscience and
Remote Sensing Symposium (IGARSS08), volume 3,
pages 977–979.
Osowski, S. and Garanty, K. (2006). Wavelets and Sup-
port Vector Machine for Forecasting the Meteorologi-
cal Pollution. In Proceeding of the 7th Nordic Signal
Processing Symposium (NORSIG), pages 158–61.
Ramakrishnan, R., Schauer, J., Chen, L., Huang, Z., Shafer,
M., Gross, D., and Musicant, D. (2005). The EDAM
project: Mining atmospheric aerosol datasets. In In-
ternational Journal of Intelligent Systems, volume 20
(7), pages 759–787.
Remer, L., Tanr, D., and Kaufman, Y. (2004). Algorithm
for Remote Sensing of Tropospheric Aerosol from
MODIS: Collection 5. In MODIS ATBD. NASA.
Ren, R., Guo, S., and Gu, L. (2010). Fast bowtie effect
elimination for MODIS L1B data. In The Journal of
China Universities of Posts and Telecommunications,
volume 17(1), pages 120–126. Elsevier.
Siwek, K., Osowski, S., Garanty, K., and Sowinski, M.
(2008). Ensemble of Neural Predictors for Forecast-
ing the Atmospheric Pollution. In IEEE International
Joint Conference on Neural Network, pages 643–648.
Vapnik, V. (1995). The nature of statistical learning theory.
Springer-Verlag, Berlin.
Vucetic, S., Han, B., Mi, W., Li, Z., and Obradovic, Z.
(2008). A Data-Mining Approach for the Validation
of Aerosol Retrievals. In IEEE Geoscience and Re-
mote Sensing Letter, volume 5(1), pages 113–117.
Xu, Q., Obradovic, Z., Han, B., Li, Y., Braverman, A., and
Vucetic, S. (2005). Improving Aerosol Retrieval Ac-
curacy by Integrating AERONET, MISR and MODIS
Data. In The 8th Intenational Conference on Informa-
tion Fusion, volume 1.
DOWNSCALING AEROSOL OPTICAL THICKNESS TO 1 KM2 SPATIAL RESOLUTION USING SUPPORT
VECTOR REGRESSION REPLIED ON DOMAIN KNOWLEDGE
239
