
HYBRID APPROACH FOR IMPROVED PARTICLE SWARM
OPTIMIZATION USING ADAPTIVE PLAN SYSTEM
WITH GENETIC ALGORITHM
Pham Ngoc Hieu and Hiroshi Hasegawa
Department of Systems Engineering and Science, Shibaura Institute of Technology, Saitama, Japan
Keywords:
Particle swarm optimization (PSO), Genetic algorithms (GAs), Adaptive system, Multi-peak problems.
Abstract:
To reduce a large amount of calculation cost and to improve the convergence to the optimal solution for
multi-peak optimization problems with multi-dimensions, we purpose a new method of Adaptive plan sys-
tem with Genetic Algorithm (APGA). This is an approach for Improved Particle Swarm Optimization (PSO)
using APGA. The hybrid strategy using APGA is introduced into PSO operator (H-PSOGA) to improve the
convergence towards the optimal solution. The H-PSOGA is applied to some benchmark functions with 20
dimensions to evaluate its performance.
1 INTRODUCTION
The product design is becoming more and more com-
plex for various requirements from customers and
claims. As a consequence, its design problem seems
to be multi-peak problem with multi-dimensions. The
Genetic Algorithm (GA) (Goldberg, 1989) is the most
emergent computing method has been applied to var-
ious multi-peak optimization problems. The valid-
ity of this method has been reported by many re-
searchers. However, it requires a huge computational
cost to obtain stability in the convergence to an op-
timal solution. To reduce the cost and to improve
stability, a strategy that combines global and local
search methods becomes necessary. As for this strat-
egy, current research has proposed various methods.
For instance, Memetic Algorithms (MAs) are a class
of stochastic global search heuristics in which Evolu-
tionary Algorithms-based approaches (EAs) are com-
bined with local search techniques to improve the
quality of the solutions created by evolution. MAs
have proven very successful across the search abil-
ity for multi-peak functions with multiple dimensions
(Smith et al., 2005). These methodologies need to
choose suitably a best local search method from vari-
ous local search methods for combining with a global
search method within the optimization process. Fur-
thermore, since genetic operators are employed for a
global search method within these algorithms, design
variable vectors which are renewed via a local search
are encoded into its genes many times at its GA pro-
cess. These certainly have the potential to break its
improvedchromosomesvia gene manipulation by GA
operators, even if these approaches choose a proper
survival strategy.
To solve these problems and maintain the sta-
bility of the convergence to an optimal solution for
multi-peak optimization problems with multiple di-
mensions, Hasegawa et al. proposed a new evolution-
ary algorithm (EA) called an Adaptive Plan system
with Genetic Algorithm (APGA) (Hasegawa, 2007).
Recently, especially, meta-heuristics receive a lot
of attentions. There is Particle Swarm Optimization
(PSO) has been developed by Kennedy and Eberhart
(2001). PSO is the method using simple iterative cal-
culations, thus it is easy to create the program source.
Therefore, PSO is applicable to wide-ranging opti-
mization problems. However, it might be difficult
to find the global optimal solution when it comes to
complex objective functions which have a lot of lo-
cal optimal solutions. The main problem of PSO is
that it prematurely converges to stable point which is
not necessarily optimum. To resolve this problem,
various improvement algorithms are proposed. It is
proven to be a successful in solving a variety of opti-
mal problems.
In this paper, we purposed a Hybrid strategy for
Improved PSO using APGA (H-PSOGA) to converge
to the optimal solution.
This paper is organized in the following manner.
267
Ngoc Hieu P. and Hasegawa H..
HYBRID APPROACH FOR IMPROVED PARTICLE SWARM OPTIMIZATION USING ADAPTIVE PLAN SYSTEM WITH GENETIC ALGORITHM.
DOI: 10.5220/0003626202670272
In Proceedings of the International Conference on Evolutionary Computation Theory and Applications (ECTA-2011), pages 267-272
ISBN: 978-989-8425-83-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
The concept of PSO is described in Section 2, con-
cept of APGA is in Section 3. Section 4 explains the
algorithm of proposed strategy (H-PSOGA), and Sec-
tion 5 discussed about the convergence to the optimal
solution of multi-peak benchmark functions. Finally,
Section 6 includes some brief conclusions.
2 PARTICLE SWARM
OPTIMIZATION
2.1 PSO Algorithms
Particle Swarm Optimization (PSO) is a population
based stochastic optimization technique inspired by
a social behavior of bird flocking or fish schooling
(Kennedy and Eberhart, 2001).
PSO is an algorithm of a multipoint search type
that is effective to solve the optimization problem. It
can be said that PSO has a high versatility because it
can search whether the objective function has contin-
uousness or differentiability, and using only informa-
tion of the objective function value (Shi and Eberhart,
1998).
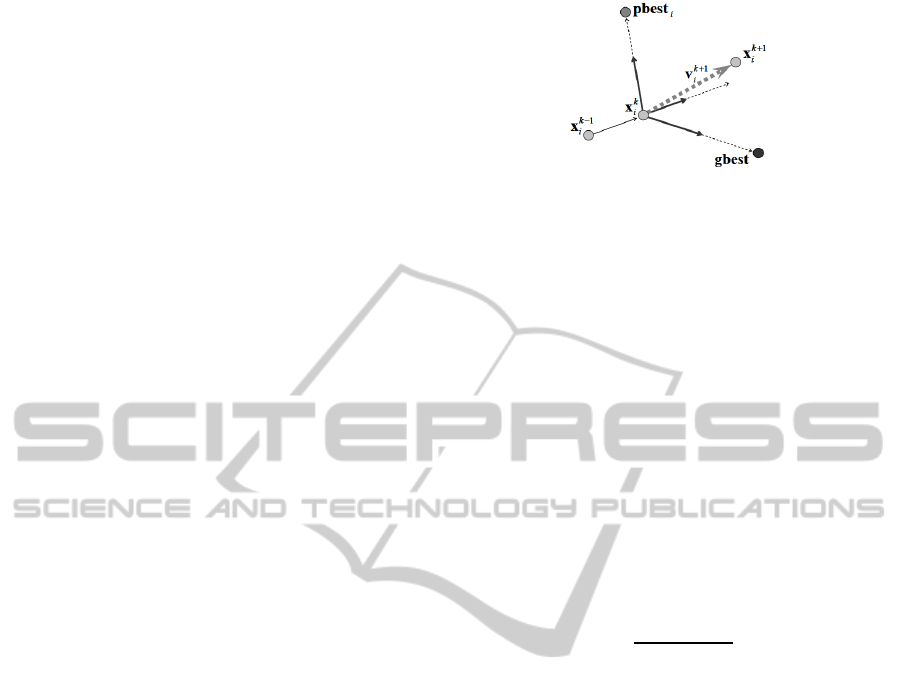
We are concerned here with gbest-model which is
known to be conventional PSO. In gbest-model, each
particle which makes up a swarm has information of
its position and velocity at the present in the search
space. And it has information of the best solution
found so far of itself as pbest and of a whole swarm as
gbest. Each particle aims at the global optimal solu-
tion by updating next velocity making use of the po-
sition at the present, pbest and gbest, as following
equation:
v
k+1
ij
= wv
k
ij
+ c
1
rand
1
()
ij
pbest
k
ij
−x
k
ij
+c
2
rand
2
()
ij
gbest
k
j
−x
k
ij
(1)
x
k+1
ij
= x
k
ij
+ v
k+1
ij
(2)
Where v and x are velocity and position respec-
tively; i is the particle number,and j indicates the j-th
component of these vectors; pbest
i
is the best position
that j-th particle has ever found; gbest is the best posi-
tion which particles has ever found; rand
1
and rand
2
are two uniformly distributed random values indepen-
dently generated within [0, 1] for the k-th dimension;
w is the inertia weight; c
1
and c
2
are the acceleration
coefficients.
The position of each particle is updated with (2)
by the velocity updated in (1) as shown in Figure 1.
After a number of iterations, PSO is going to get the
global optimal solution as conclusive gbest.
Figure 1: Image of PSO Algorithm.
2.2 Improved PSO
Given its simple concept and effectiveness, the PSO
has become a popular optimizer and has widely been
applied in practical problem solving. Meanwhile,
much research on performance improvements has
been reported including parameter studies, combina-
tion with auxiliary operations, and topological struc-
tures.
Linearly Decreasing Inertia Weight (LDIW) is the
technique of basic PSO introduced by Shi and Eber-
hart (1998). The inertia weight w in (1) linearly de-
creasing with the iterative generation. In this method,
the value of w is adopted below:
w = w
max
−
w
max
−w
min
iteration
max
iteration (3)
Where the maximal and minimal weights w
max
and w
min
are respectively set 0.9, 0.4 known from ex-
perience.
In PSO algorithm, the concept of diversification
and intensification is quite important, because it de-
cides the characteristic of the swarm and the search
performance. By using (3), the particles can be trans-
formed from diversification to intensification by de-
creasing the inertia weight linearly as the search pro-
ceeds.
In addition to the inertia weight, the acceleration
coefficients c
1
and c
2
are also important parameters
in PSO. Both acceleration coefficients are essential to
the success of PSO. Kenedy and Eberhart (2001) sug-
gested a fixed value of 2.0, and this configuration has
been adopted by many other researchers.
Another active research trend in PSO is hybrid
PSO, which combines PSO with other evolutionary
paradigms. All techniques have also been hybridized
with PSO to enhance performance and to prevent the
swarm from crowding too closely and to locate as
many optimal solutions as possible. For a current re-
view of hybrid approaches to PSO the reader is re-
ferred to, e.g, Zhan et al. (2009).
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
268
3 ADAPTIVE SYSTEM WITH
GENETIC ALGORITHM
3.1 The Optimization Problem
The optimization problem is formulated in this sec-
tion. Design variable, objective function and con-
strain condition are defined as follows:
Design variable : X = [x
1
, . . . , x
n
] (4)
Objective function : −f(X) → Max (5)
Constrain condition : X
LB
≤ X ≤ X
UB
(6)
Where X
LB
=
x
LB
1
, . . . , x
LB
n
, X
UB
=
x
UB
1
, . . . , x
UB
n
and n denote the lower boundary
condition vectors, the upper boundary condition
vectors and the number of design variable vectors
(DVs) respectively. A number of DV’s significant
figure is defined, and DV is rounded off its places
within optimization process.
3.2 APGA
The APGA concept was introduced as a new EA strat-
egy for multi-peak optimization problems. Its con-
cept differs in handling DVs from general EAs based
on GAs. EAs generally encode DVs into the genes
of a chromosome, and handle them through GA op-
erators. However, APGA completely separates DVs
of global search and local search methods. It en-
codes Control variable vectors (CVs) of AP into its
genes on Adaptive system (AS). Moreover, this sep-
aration strategy for DVs and chromosomes can solve
Memetic Algorithm (MA) problem of breaking chro-
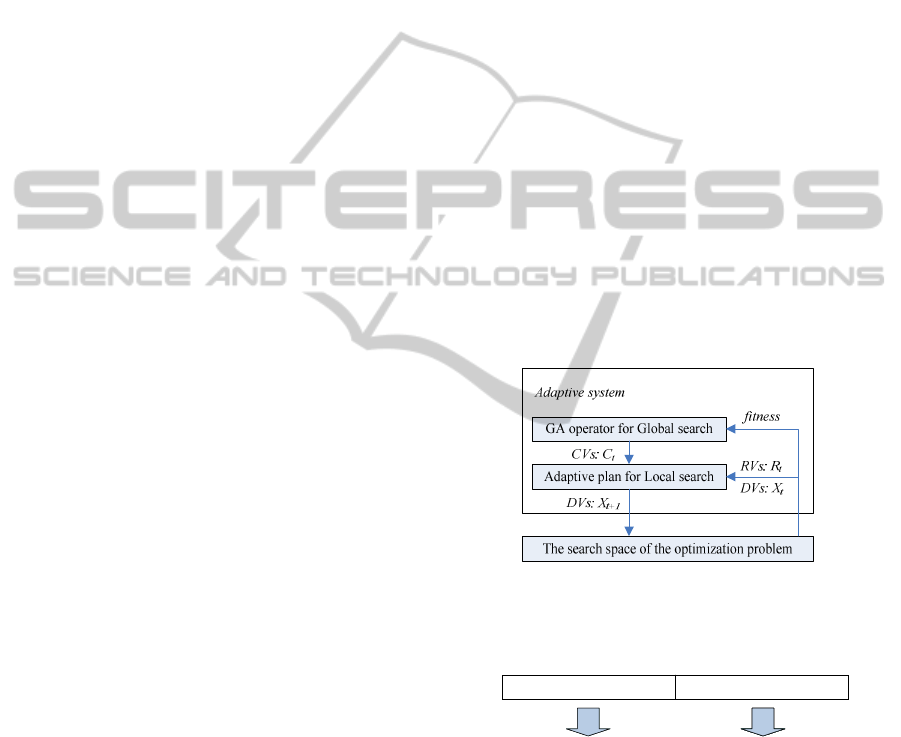
mosomes (Smith et al., 2005). The conceptual pro-
cess of APGA is shown in Figure 2. The control
variable vectors (CVs) steer the behavior of adaptive
plan (AP) for a global search, and are renewed via ge-
netic operations by estimating fitness value. For a lo-
cal search, AP generates next values of DVs by using
CVs, response value vectors (RVs) and current values
of DVs according to the formula:
X
t+1
= X
t
+ NR
t
·AP(C
t
, R
t
) (7)
Where NR, AP(), X, C, R, t denote neighbor-
hood ratio, a function of AP, DVs, CVs, RVs
and generation, respectively. In addition, for a
verification of APGA search process, refer to ref.
(Sousuke Tooyama, 2009) (Pham Ngoc Hieu, 2010).
3.3 Adaptive Plan
It is necessary that the AP realizes a local search pro-
cess by applying various heuristics rules. In this pa-
per, the plan introduces a DV generation formula us-
ing a sensitivity analysis that is effective in the convex
function problem as a heuristic rule, because a multi-
peak problem is combined of convex functions. This
plan uses the following equation:
AP(C
t
, R
t
) = −Scale·SP·sign(∇R
t
) (8)
SP = 2C
t
−1 (9)
Where Scale, ∇R denote the scale factor and sen-
sitivity of RVs, respectively. A step size SP is defined
by CVs for controlling a global behavior to prevent it
falling into the local optimum. C = [c
i, j
, . . . , c
i, p
];
(0.0 ≤ c
i, j
≤ 1.0) is used by (9) so that it can change
the direction to improve or worsen the objective func-
tion, and C is encoded into a chromosome by 10 bit
strings as shown in Figure 3. In addition, i, j and p are
the individual number, design variable number and its
size, respectively.
Figure 2: Conceptual process of APGA.
0 0 0 1 0 1 0 0 0 0
0 0 0 0 0 1 0 1 0 0
c
i,
1
=
80/1023 =
0.07820
c
i,
2
=
20/1023 =
0.01955
0 0 0 1 0 1 0 0 0 0
Individual
i
Step size
c
i,
1
of
x
1
:
Step size
c
i,
2
of
x
2
:
0 0 0 1 0 1 0 0 0 0
0 0 0 0 0 1 0 1 0 0
c
i,
1
=
80/1023 =
0.07820
c
i,
2
=
20/1023 =
0.01955
0 0 0 1 0 1 0 0 0 0
Individual
i
Step size
c
i,
1
of
x
1
:
Step size
c
i,
2
of
x
2
:
Figure 3: Encoding into genes of a chromosome.
3.4 GA Operators
3.4.1 Selection
Selection is performed using a tournament strategy to
maintain the diverseness of individuals with a goal of
keeping off an early convergence. A tournament size
of 2 is used.
HYBRID APPROACH FOR IMPROVED PARTICLE SWARM OPTIMIZATION USING ADAPTIVE PLAN SYSTEM
WITH GENETIC ALGORITHM
269
3.4.2 Elite Strategy
An elite strategy, where the best individual survives in
the next generation, is adopted during each generation
process.
It is necessary to assume that the best individual,
i.e., as for the elite individual, generates two behav-
iors of AP by updating DVs with AP, not GA oper-
ators. Therefore, its strategy replicates the best indi-
vidual to two elite individuals, and keeps them to next
generation.
3.4.3 Crossover and Mutation
In order to pick up the best values of each CV, a single
point crossover is used for the string of each CV. This
can be considered to be a uniform crossover for the
string of the chromosome.
Mutation are performed for each string at muta-
tion ratio on each generation, and set to maintain the
strings diverse.
3.4.4 Recombination
At following conditions, the genetic information on
chromosome of individual is recombined by uniform
random function.
• One fitness value occupies 80% of the fitness of
all individuals.
• One chromosome occupies 80% of the popula-
tion.
If this manipulation is applied to general GAs, an
improved chromosome into which DVs have been en-
coded is broken down. However, in the APGA, the
genetic information is only CVs used to make a deci-
sion for the AP behavior. Therefore, to prevent from
falling into a local optimum, and to get out from the
condition of being converged with a local optimum,
a new AP behavior is provided by recombining the
genes of the CVs into a chromosome. And the opti-
mal search process starts to re-explore by a new one.
This strategy is believed to make behavior like the re-
annealing of an SA.
4 HYBRID PSO AND APGA
Many of optimization techniques called meta-
heuristics including PSO are designed based on the
concept. In case of PSO, when a particle discovers a
good solution, other particles also gather around the
solution. Therefore, they cannot escape from a local
optimal solution. Consequently, PSO cannot achieve
the global search. However, APGA that combines the
global search ability of a GA and an Adaptive Plan
with excellent local search ability is superior to other
EAs (MAs). With a view to global search, we pro-
pose the newalgorithm based on PSO for getting hints
from APGA named H-PSOGA. The communication
between PSO and APGA is mentioned below.
4.1 The Concept of Proposed Method
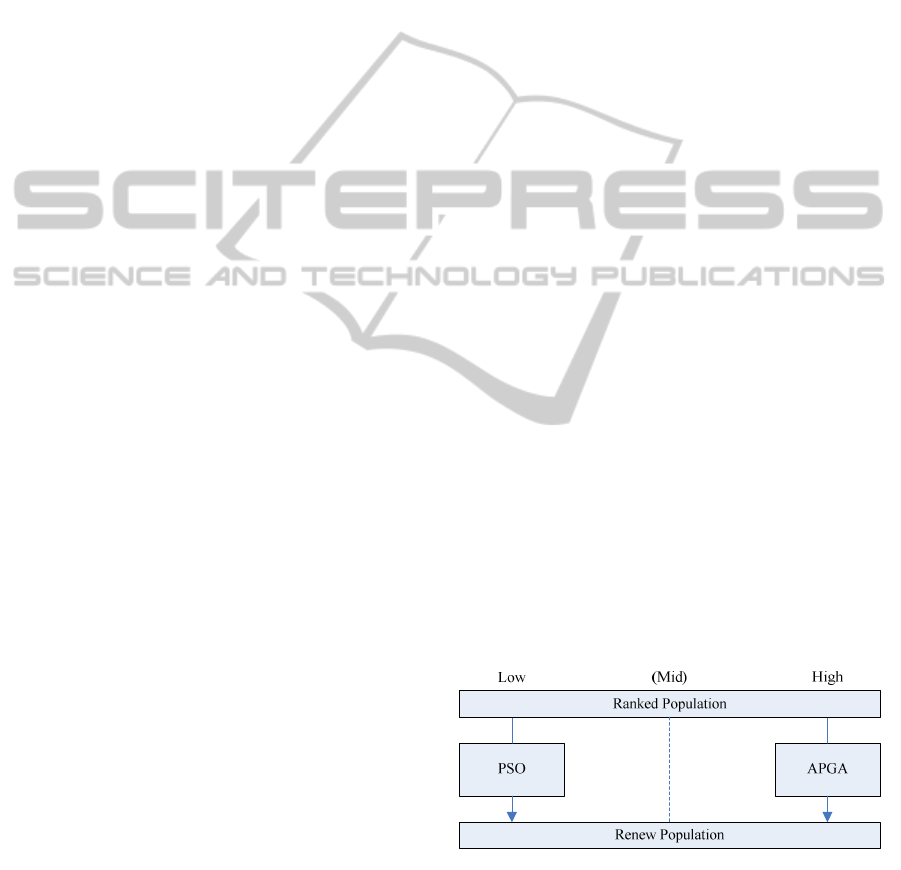
4.1.1 Parallel Method (Type 1)
H-PSOGA Type 1 sorts all of individuals by estimat-
ing their fitness then ranks them by these sorting re-
sults. In this method, both PSO and APGA are run
in parallel, with one half of individual number is ad-
justed to PSO operator and another half one is deter-
mined by APGA process. This type maintains the it-
eration of PSO and APGA for the entire run, which
consists chiefly of genetic algorithm (GA), combined
with PSO and the sequential steps of the algorithm are
given below. Briefly, the operations are illustrated in
Figure 4.
Step 1: Sort all of individuals by estimating their
fitness value then rank them by results.
Step 2: The good individuals (high fitness values)
are evolved with APGA and procedure offspring.
Step 3: The low individuals (low fitness values)
are evolved with PSO and their best position is up-
dated with velocity.
Step 4: Combine as the new population and cal-
culate their fitness, choose the best position as the
global.
Step 5: Repeat steps 2-4 until the termination such
as a sufficiently good solution or a maximum number
of generations being completed, is satisfied.
The best scoring individual in the population is
taken as the global optimal solution.
Figure 4: H-PSOGA Type 1.
4.1.2 Serial Method (Type 2)
H-PSOGA Type 2 aims at getting the direction from
particle swarm to adjust into APGA. This method in-
troduces a DV generation formula using the veloc-
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
270
ity update from PSO operator, not sensitivity analy-
sis. AP generates next values of DVs by using CVs,
velocity v and current values of DVs following the
equations:
x
t+1
= x
t
+ NR
t
·AP(C
t
, v
t+1
) (10)
AP(C
t
, v
t+1
) = −Scale·SP.v
t+1
ij
(11)
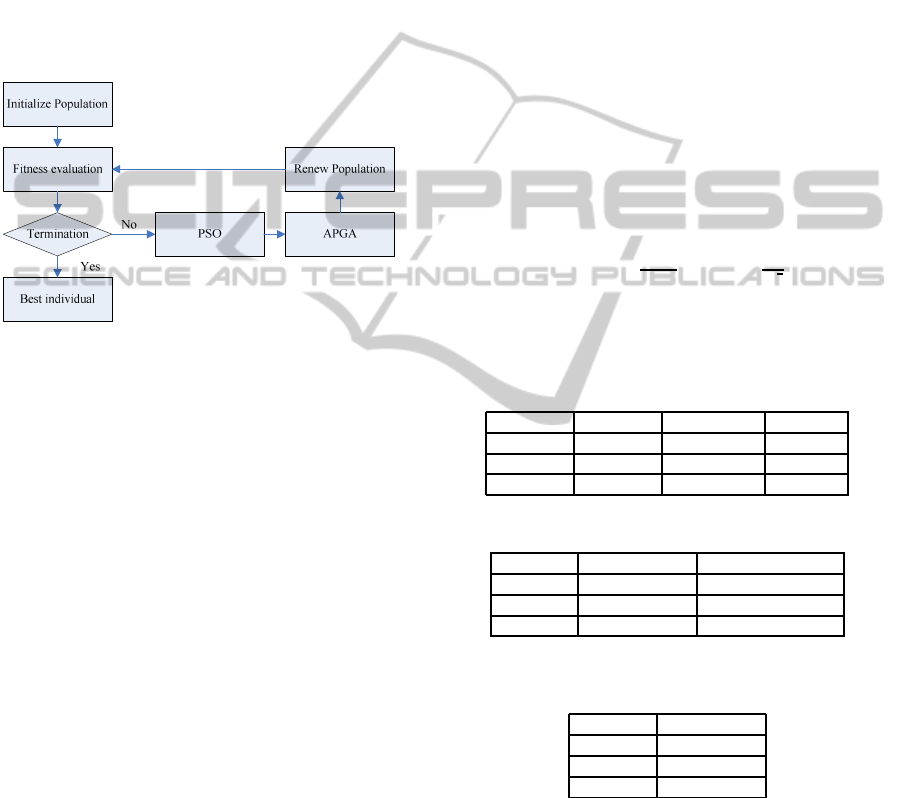
The flowchart of Type 2 is shown in Figure 5. In this
approach, PSO and APGA run individually. The iter-
ation is run by PSO operator and the velocity update
following (1) is given as initial parameter of AP for
APGA process.
Figure 5: H-PSOGA Type 2.
4.2 The Roles of Type 1 and Type 2
As described above, the individuals which compose
of Type 1 play the role of searching intensively around
of gbest, to parallel with APGA that combines global
search and local search, and the whole swarm is stabi-
lized. On the other hand, that of Type 2 play the role
of searching globally in the solution space by getting
the direction from PSO operator adjusted into APGA,
and the whole swarm is un-stabilized.
We can say that Type 1 achieves the intensifica-
tion, and Type 2 diversification with the aim to reduce
the calculation cost and improve the convergence to
the optimal solution.
5 NUMERICAL EXPERIMENTS
The numerical experiments are first performed to
compare among methods. To show the effects of these
methods whether particles can escape from a local op-
timal solution and find the global optimal solution,
we compare with other methodologies for the robust-
ness of the optimization process. These experiments
are performed 20 trials for every function. The ini-
tial seed number is randomly varied during everytrial.
In each experiment, the GA parameters used in solv-
ing benchmark functions are set as follows: selection
ratio, crossover ratio and mutation ratio are 1.0, 0.8
and 0.01 respectively. The population size is 50 indi-
viduals and the terminal generation is 5000th genera-
tion. The sensitivity plan parameters in (8) and (11)
for normalizing functions are listed in Table 3. The
inertia weight w is adopted by LDIW method with
w
max
, w
min
is respectively set 0.9, 0.4, and the accel-
eration coefficients c
1
and c
2
are set by fixed value of
2.0.
5.1 Benchmark Functions
For the H-PSOGA, we estimate the stability of the
convergence to the optimal solution by using three
benchmark functions with 20 dimensions Rastrigin
(RA), Griewank (GR) and Rosenbrock (RO).
These functions are given as follows:
RA = 10n+
n
∑
i=1
{x
2
i
−10cos(2πx
i
)} (12)
GR = 1+
n
∑
i=1
x
2
i
4000
−
n
∏
i=1
cos
x
i
√
i
(13)
RO =
n
∑
i=1
100(x
i+1
+ 1−(x
i
+ 1)
2
)
2
+ x
2
i
(14)
Table 1: Characteristics of the benchmark functions.
Function Epistasis Multi-peak Steep
RA No Yes Average
GR Yes Yes Small
RO Yes No Big
Table 2: Design range, digits of DVs.
Function Design range Number of digits
RA No 2
GR Yes 1
RO Yes 3
Table 3: Scale factor for normalizing the benchmark func-
tions.
Function Scale factor
RA 10.0
GR 100.0
RO 4.0
Table 1 shows their characteristics, and the terms
epistasis, multi-peak, steep denote the dependence re-
lation of the DVs, presence of multi-peak and level of
steepness, respectively. All functions are minimized
to zero, when optimal DVs X = 0 are obtained. More-
over, it is difficult to search for their optimal solutions
by applying one optimization strategy only, because
each function has a different complicated characteris-
tic. In Table 2, their design range, the digits of DVs
HYBRID APPROACH FOR IMPROVED PARTICLE SWARM OPTIMIZATION USING ADAPTIVE PLAN SYSTEM
WITH GENETIC ALGORITHM
271
are summarized. If the search point attains an opti-
mal solution or a current generation process reaches
the termination generation, the search process is ter-
minated.
5.2 Experiment Results
The experiment results are shown in Table 4. In the
table, when success rate of optimal solution is not
100%, ”-” is described. By H-PSOGA Type 1, the
solutions of all benchmark function with 20 dimen-
sions reach their global optimum solutions. However,
H-PSOGA Type 2 could not reach the optimum solu-
tion with RO function because of the communication
between PSO operator and APGA. As a result, we can
confirm that Type 1 converged faster than Type 2.
H-PSOGA Type 1 converged similar to APGA
process with high fitness value. APGA process could
arrive at a global optimum with a high probability and
PSO operator converged faster with RO function but
could not reach with RA function.
From the result shown in Table 4, we employed
H-PSOGA Type 1 for H-PSOGA model.
To sum up, it validity confirms that this hybrid
strategy can reduce the computation cost and improve
the stability of the convergence to the optimal solu-
tion.
Table 4: Num. of generations with 20 dimensions.
Function Basic PSO H-PSOGA H-PSOGA
Type 1 Type 2
RA - 202 405
GR 2878 344 538
RO 2220 1353 -
5.3 Comparison
H-PSOGA was compared with basic PSO. PSO al-
gorithm converged the optimum solution with GR
and RO function but did not reach with RA function.
However the number of iterations is still large. The
results of basic PSO are shown in Table 4.
This method was better than basic PSO in all
benchmark functions, and it converged the global op-
timal solution with a high probability. Therefore, it is
desirable to introduce APGA for improved PSO.
In particular, it was confirmed that the computa-
tional cost with these method could be reduced for
benchmark functions. And it showed that the conver-
gence to the optimal solution could be improve more
significantly.
Overall, the H-PSOGA was capable of attaining
robustness, high quality, low calculation cost and ef-
ficient performance on many benchmark problems.
6 CONCLUSIONS
In this paper, to overcome the weak point of PSO
that particles cannot escape from a local optimal so-
lution, and to achieve the global search for the solu-
tion space of multi-peak optimization problems with
multi-dimensions, we proposed the new hybrid ap-
proach, H-PSOGA. Then, we verified the effective-
ness of H-PSOGA by the numerical experiments per-
formed three benchmark functions. The obtained
points are shown below
The search ability of H-PSOGA with the multi-
dimensions optimization problems is very effective,
compared with that of basic PSO or GA.
Both types of H-PSOGA achieved at the opti-
mal solution, however they have strengths and weak-
nesses. The key is how to communicate between PSO
and APGA, it is a future work.
Finally, this study plans to do a comparison with
the sensitivity plan of AP by applying other optimiza-
tion methods into AP and optimizing some kinds of
benchmark functions.
REFERENCES
Goldberg, D. E. (1989). Genetic Algorithms in Search Op-
timization and Machine Learning. Addison-Wesley.
Hasegawa, H. (2007). Adaptive plan system with genetic al-
gorithm based on synthesis of local and global search
method for multi-peak optimization problems. In 6th
EUROSIM Congress on Modelling and Simulation.
Kennedy, J. and Eberhart, R. (2001). Swarm Intelligence.
Morgan Kaufmann Publishers.
Pham Ngoc Hieu, H. H. (2010). Hybrid neighborhood con-
trol method of adaptive plan system with genetic algo-
rithm. In 7th EUROSIM Congress on Modelling and
Simulation.
Shi, Y. and Eberhart, R. C. (1998). A modified particle
swarm optimizer. In IEEE World Congr. Comput. In-
tell.
Smith, J. E., Hart, W. E., and Krasnogor, N. (2005). Recent
Advances in Memetic Algorithms. Springer.
Sousuke Tooyama, H. H. (2009). Adaptive plan system
with genetic algorithm using the variable neighbor-
hood range control. In IEEE Congress on Evolution-
ary Computation (CEC 2009).
ECTA 2011 - International Conference on Evolutionary Computation Theory and Applications
272
