
MECHANISMS FOR TEMPORAL LOGIC IMPLEMENTATION
IN RULE-BASED SYSTEMS
Josef Hahn, Karl-Heinz Krempels and Christoph Terwelp
Informatik 5, Information Systems and Databases
RWTH Aachen University, Aachen, Germany
Keywords:
Temporal logic, Rule-based system.
Abstract:
Rule-based systems are more and more important in middleware architectures and distributed applications.
Although support for temporal constructs would be very conveniant for many domains, implementations are
not yet widespread. This paper is about several methods to expand rule-based systems and the commonly used
RETE algorithm in order to gain basic support for temporal logic constructs. A few promising approaches are
discussed and compared with respect to efficiency, memory usage, and implemetation details. The paper is
limited on the discussion of temporal logics in rule-based systems and does not take temporal logic in other
contexts into account.
1 INTRODUCTION
A rule-based system (RBS) can be used by an user
to automatically reason about an existing knowledge
base with the help of rules in order to deduce new
knowledge. A rule based system consists in general
of:
Working Memory which stores the facts that are as-
serted by the system. Each fact is a data structure
that represents the information about one entity or
relation in the domain of consideration.
Rule Base which stores the rules that are used to de-
duce new knowledge. Each rule consists of a con-
dition and an action-list that is processed every
time when the condition becomes true.
Inference Machine which applies all rules from the
rule base to the working memory to deduce new
knowledge. This is called the reasoning process.
Whenever the assignment of a new fact satisfies
the condition of a rule in the rule base, the action-
list of the rule will be executed. The action-list
can change the working memory and the rule base
to produce new knowledge.
For many domains inside and outside the field of arti-
ficial intelligence it is desirable to have access to tem-
poral constructs in order to model the temporal di-
mension of the domain of discourse in a natural way
(Baader et al., 2003) (Ross, 2003). Existing rule-
based systems provide none or only a very limited
support for temporal modelling constructs (Lin and
Krempels, 2008) (Krempels et al., 2009) (Hill, 2003).
The objective of this paper is to introduce a few prac-
tical ways for upgrading an existing RETE-based sys-
tem.
Therefore, the first step is to achieve support for
temporal facts and temporal rules. A temporal fact is
a fact with a finite life time that can be limited by a
predefined activation and expiration time. Outside of
this time interval the inference machine assumes that
the fact does not exists. The same capabilities have to
be provided for rules to model temporal rules.
2 THE RETE ALGORITHM
The RETE algorithm (Forgy, 1990) is inspired by
the idea of dynamic programming and is one of
the most common approaches for discrimination net-
works. The algorithm creates a network (a directed,
acyclic graph) to process the rules in an efficient way.
In this network each test used in the condition of a
rule is represented by a node. The whole condition of
the rule is represented by a subgraph in the network.
The network has one root node as source and for each
rule one terminal node as sink. Each node has at least
one input, except for the root node. Furthermore, each
node has one output, except for the terminal nodes.
The objects that are processed in the network are
facts and tuples of facts. A node applies a predefined
set of filters to its input facts and forwards the match-
508
Hahn J., Krempels K. and Terwelp C..
MECHANISMS FOR TEMPORAL LOGIC IMPLEMENTATION IN RULE-BASED SYSTEMS.
DOI: 10.5220/0003310605080513
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 508-513
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

ing ones to the output. Every time, when a fact or
a tuple arrives at a terminal node of the network, the
rule which this node belongs to is activated. Every
node in the network has its own memory that stores
all the facts that fulfill the test condition of the node.
In this way the network saves intermediate processing
results and in this meets the dynamic programming
requirements.
The filtering inside the network reflects the filter-
ing in the condition-part of the rules inside the rule
base. This is enabled by different types of nodes:
Object Type Node selects all facts arriving on its in-
put, which are derived from a defined template.
For example, it can forward all facts based on the
template “customer”.
Alpha Node selects all facts arriving on its input,
which have a defined value in a defined slot. For
example, it can forward all facts with the value
“red” in the slot “color”.
Join Node has an alpha input and a beta input. The
alpha input handles facts whereas the beta input
handles tuples of facts.
A Join Node expands the tuples by the facts in the
way of the cartesian product. So, for n-tuples on
the beta input, it will output (n + 1)-tuples. This
node type can apply additional filters to the results
in the same way as the Alpha Node.
3 THE APPROACH
To extend rule-based systems by temporal reasoning
the following steps are required:
1. A time and date data type for facts and rules,
which is used by the engine to represent the ac-
tivation and expiration time for this elements.
2. Extension of the RBS programming language to
support the time and date data types for the op-
tional specification of validity intervals for facts
and rules.
3. Definition and implementation of functional and
relational operators for time and date data types.
4. Enhancement of the RBS engine to process the
temporal rules and facts.
Since the first three items can be realized very easy
we will focus a little more on the enhancement of
the RBS engine to process temporal rules and facts.
The approaches presented here were implemented
and evaluated with the help of the RBS Jamocha that
uses CLIPS (C Language Integrated Production Sys-
tem) as rule and fact definition language (program-
ming language).
TemporalConstraint = "(temporal-validity "
StartAttribute Duration ")";
StartAttribute = [MilliSecond] [Second] [Minute]
[Hour] [Day] [Month] [Year] [Weekday];
Duration = "(duration " DurationValue ")";
MilliSecond = "(msecond " MilliSecondValue ")";
Second = "(s " SecondValue ")";
Minute = "(minute " SecondValue ")";
Hour = "(hour " HourValue ")";
Day = "(day " DayValue ")";
Month = "(month " MonthValue ")";
Year = "(year " YearValue ")";
Weekday = "(weekday " WeekdayValue ")";
Value = "*" | "*/" Number | NumberSequence;
NumberSequence = Number { "," Number };
Number = Digit { Digit };
Figure 1: Extensions of the CLIPS language for the defini-
tion of temporal constraints.
3.1 Extension of the RBS Programming
Language
An extension of the RBS programming language is
required in order to support the data types for the
optional specification of validity intervals for facts
and rules. With the help of the syntactical produc-
tions given in Fig. 1 the RBS programming language
CLIPS is extended by a TemporalConstraint.
With the help of the production of a TemporalCon-
straint it is possible to specify both a fixed time inter-
val, consisting of an activation time and the duration
of the rules activation, or a sequence of time inter-
vals. The fixed temporal constraint shown in Fig. 2
describes the time interval starting at the 7th of April
1971 at 0:00:00s.000ms with a duration of 24 hours.
(temporal-validity (msecond 0)
(second 0) (minute 0)(hour 0)
(day 7)(month 4)(year 1971)
(duration 1d)
)
Figure 2: Example for a fixed temporal constraint.
Fig. 3 shows a periodic temporal constraint that
describes the first 12 hours of every Wednesday in
April in every year.
(temporal-validity (msecond 0)
(second 0) (minute 0)(hour 0)
(month 4)(weekday 3)
(duration 12h)
)
Figure 3: Example for a periodic temporal constraint.
MECHANISMS FOR TEMPORAL LOGIC IMPLEMENTATION IN RULE-BASED SYSTEMS
509

The duration can be provided for a fixed as well
as for a periodic time constraint either as an inte-
ger value in milliseconds (without a suffix) or as
an integer value seconds, minutes, hours, or even
days (with the corresponding suffix
s
,
m
,
h
, or
d
).
The value ranges for milliseconds, seconds, minutes,
hours, days, months, years and weekdays are given in
Fig. 4.
MilliSecondValue : {0, 1, . . . , 999}
SecondValue : {0, 1, . . . , 59}
MinuteValue : {0, 1, . . . , 59}
HourValue : {0, 1, . . . , 23}
DayValue : {1, . . . , 31}
MonthValue : {1, . . . , 12}
Year : {0000,1981,1982, . . . ,3000}
Weekday : {0,1, . . . ,6}
Figure 4: Value range restrictions for the definition of tem-
poral constraints.
The TemporalConstraint described above was
added to the syntactical production rules of the RBS
for rules and facts to enable one to define temporal
rules and facts. The modified syntactical production
rules for the RBS programming language CLIPS are
shown in Fig. 5. In both defintions for rules and facts
the TemporalConstraint was added as an optional at-
tribute that is processed by the temporal reasoning
part of the RBS to activate and deactivate the tem-
poral elements at the corresponding points of time.
Rule = "(defrule " Name Comment
Attribute {Condition}
"=>" {Action} ")";
Attribute = [Priority] [AutoFocus]
[Version] [TemporalConstraint];
Fact = "(" TemplateName
[TemporalConstraint] {Slot} ")";
Figure 5: Syntactical production rules for rules and facts.
3.2 Temporal Rules and Facts
A simple way to take temporal constraints into ac-
count is to provide time dependent rules. We will not
discuss temporal facts in detail because they can be
emulated easily by temporal rules. We just create a
temporal rule for each temporal fact which adds and
removes the fact as required.
The implementations of Rete networks suggest
three approaches for the realization of temporal rules.
3.2.1 Common Time Fact
The first approach consists in a special fact that is up-
dated periodically in well defined time intervals. Ev-
ery time when this special fact is updated the activa-
tion conditions of all the temporal rules have to be
evaluated. Thus, this approach is not very efficient
since the computation complexity for the well defined
time interval for the update of the time fact will in-
crease with the number of temporal rules.
A sketch of this approach is given in Fig. 6.
The special fact point-in-time is updated periodically
(controlled by a timer). All the temporal rules from
the rule base are checked after every update of the
special fact.
!"#$%&"'(
!"#$%&'$%'&$()*+++,
)*+(,-).,("/
!"#$%&'()%&*+$,'-
)(+01,"2%342(
(.
/
/
/
-012
/
/
/
-.*/*"#$%&'$%'&$()*/*-0
Figure 6: Temporal rule implementation by single time fact.
3.2.2 Temporal Trigger Facts
Another approach is to introduce a trigger fact for
each temporal rule as shown in Fig. 7. This fact
is used by the rule and controlled by a central timer
thread. This timer thread can manage all the exist-
ing trigger facts and adds or removes them when the
corresponding rule should become valid or invalid.
This method should be much more efficient as the first
approach because the timer thread is only active to
add and remove trigger facts. The remaining time it
sleeps and uses a minimum of the systems ressources.
Maybe the performance could be further improved by
introducing trigger fact sharing, so the amount of re-
quired trigger facts and timer thread activities is re-
duced.
3.2.3 Temporal Nodes
The last approach we discuss is to implement the
temporal rules directly in the discrimination network.
Therefore, we introduce the node type temporal node
in the network that will activate and deactivate a tem-
poral rule with respect to its temporal conditions. The
implementation of temporal rules can be done either
by providing an own thread that is watching the tem-
poral constraints of exactly one rule, or by a com-
mon thread that will watch the temporal constraints
for all the rules. In the latter way the temporal con-
straints of rules have to be added to a chronological
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
510

!"#$%&"'(
!"#$%&'()*"'+,,#'-!'.)#*/($#-0'1022
!"#$%&'()*+("
!"
#
#
#
$%&'
#
#
#
!"!"#$%&'()*"'+,,#'-!'.)#*/($#-0'1022
!"#$%&'()*"'+,,#'-!'.)#*/($#-0'3022
!"#$%&'()*+("
!"!"#$%&'()*"'+,,#'-!'.)#*/($#-0'3022
!"
#
#
#
$%&'
#
#
#
Figure 7: Temporal rule implementation by unique trigger
fact.
list of tuples (consisting of the rule-id and the corre-
sponding activation or deactivation time of the rule)
for further processing by the common thread. Since
for each temporal rule at least one tuple has to be in-
serted into the list, the compilation time for rules and
the processing time of the tuples will depend on the
list’s length. Therefore, it seems to be recommend-
able only for applications with a small part of tempo-
ral rules and facts.
Temporal facts can also be filtered directly in the
discrimination network. The filter for temporal facts
can be applied in the alpha network, in the beta net-
work, or at the terminal node of a rule. Applying a
filter for a temporal fact in the alpha network takes
the advantages of the RETE network in processing
facts. A drawback of this method is that facts with a
high temporal activation / deactivation rate can over-
load the test nodes of the alpha network. This is also
the case if the filters are applied in the beta network.
So, it seems that the right place to check the temporal
validity of a fact is the terminal node of a consuming
rule. The time point when a fact arrives at the termi-
nal node of a rule is very close to the execution time
of the rule, so we have to disregard the dispatching
time of a rule in the agenda of the RBS.
4 EVALUATION
All the approaches described above have been evalu-
ated after implementation for three different configu-
rations of the RBS:
Temporal Facts Configuration is used for the de-
termination of the processing time for temporal
facts. The set of facts of this configuration con-
tains 30 temporal facts with two slots. All the tem-
poral facts are activated every 10ms for 5ms. The
set of rules of this configuration contains exactly
one rule that consumes all the facts comparing the
values of its two slots.
Temporal Rules Configuration is used for the de-
termination of the processing time for temporal
rules. The set of facts of this configuration con-
tains only one fact. The set of facts of this con-
figuration contains 30 temporal rules that are acti-
vated all together every 10ms for 5ms.
Temporal Facts and Rules Configuration is used
for the determination of the processing time for
a mix of temporal elements (facts and rules).
The set of facts of this configuration contains 30
temporal facts and the set of rules contains 30
temporal rules. The temporal facts and rules are
activated every 10ms for 5ms.
The evaluation of the measurement results is dis-
cussed separately to allow a rating of each approach
based on all three configurations.
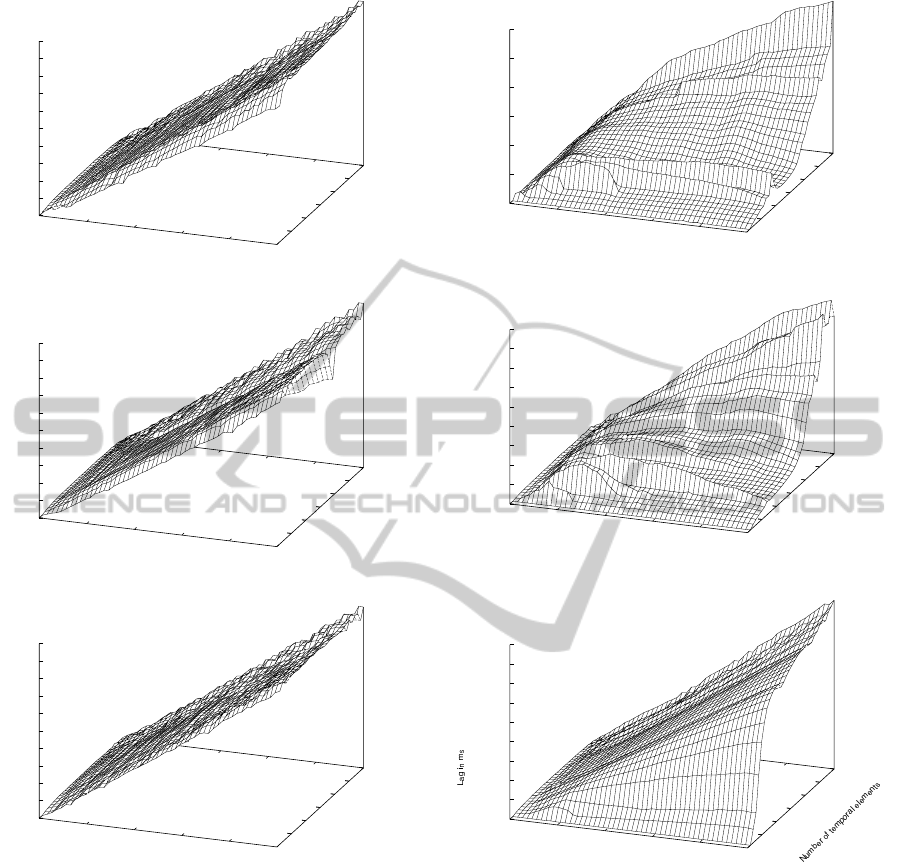
The evaluation of the time fact approach is based
on the measurements for the three configurations
shown in Fig. 8. The measurements for al three con-
figurations shown in Fig. 8(a), Fig. 8(b), and Fig.
8(c) reflect that the time lag is nearly identical to the
passed processing time, showing that nearly no pro-
cessing of temporal elements happens. The system is
clearly totally overloaded.
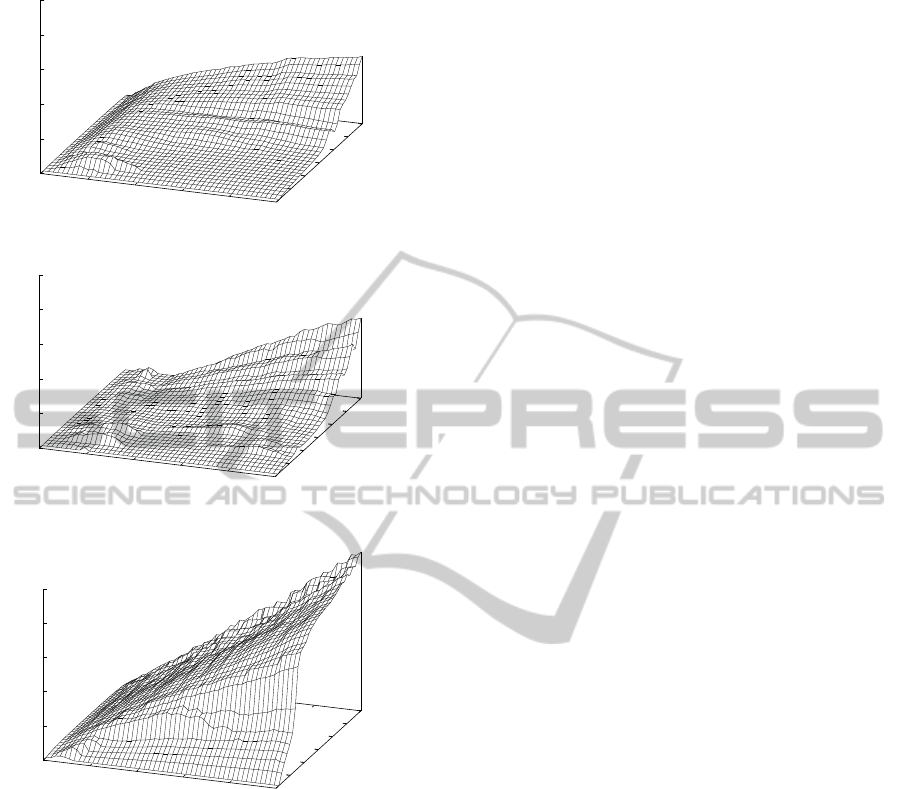
The evaluation of the trigger fact approach is
based on the measurements for the three configura-
tions shown in Fig. 9. The measurements for all
three configurations shown in Fig. 9(a), Fig. 9(b),
and Fig. 9(c) lead to the conclusion that this approach
performs pretty good as long as only temporal facts
or temporal rules are used but we see a huge change
to the worse if they are combined.
The temporal nodes approach was evaluated based
on the measurements for the three configurations
shown in Fig. 10. The measurements for alle three
configurations shown in Fig. 10(a), Fig. 10(b), and
Fig. 10(c) reflect that it performs a little bit better
than the trigger fact approach but as worse in the case
of using temporal facts and rules combined.
5 CONCLUSIONS
AND OUTLOOK
The analysis of the implemented approaches shows
that the current implementation of the RBS Jamocha
can process among 2500 temporal elements per sec-
ond without producing a processing time lag. From
this value we can derive how many temporal elements
can be processed in a rule-based application within
MECHANISMS FOR TEMPORAL LOGIC IMPLEMENTATION IN RULE-BASED SYSTEMS
511
Time in s
Lag in ms
Number of temporal elements
0
1000
2000
3000
4000
5000
5
10
15
20
25
30
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
(a) Temporal facts
Time in s
Lag in ms
Number of temporal elements
0
1000
2000
3000
4000
5000
5
10
15
20
25
30
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
(b) Temporal rules
Time in s
Lag in ms
Number of temporal elements
0
1000
2000
3000
4000
5000
5
10
15
20
25
30
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
(c) Temporal facts and rules
Figure 8: Processing lag for temporal facts and rules using
the time fact approach.
the given processing interval of one second. Further-
more, we can derive the expected processing lateness
or system imprecision if a rule-based application re-
quires a higher number of temporal elements than the
estimated value.
However, with the help of this system parame-
ter a rule-based application must be designed in ad-
vanced and the design considerations with respect to
time lags for temporal elements have to remain still
valid, even if the RBS is overloaded. To overcome
this drawback it seems suitable to introduce a special
system fact, similar to the time fact discussed above.
Time in s
Lag in ms
Number of temporal elements
0
1000
2000
3000
4000
5000
5
10
15
20
25
30
0
500
1000
1500
2000
2500
3000
(a) Temporal facts
Time in s
Lag in ms
Number of temporal elements
0
1000
2000
3000
4000
5000
5
10
15
20
25
30
0
200
400
600
800
1000
1200
1400
1600
1800
(b) Temporal rules
Time in s
0
1000
2000
3000
4000
5000
5
10
15
20
25
30
0
500
1000
1500
2000
2500
3000
3500
4000
4500
(c) Temporal facts and rules
Figure 9: Processing lag for temporal facts and rules using
the temporal trigger facts approach.
This fact should provide the respective actual time lag
of the RBS and the expected time lag for the next fire
cycle (based on the number of activated and nearly
activated rules). Further investigations will focus on
the prediction of the time lag produced by process-
ing temporal elements in RBS to allow the design of
adaptive rule-based applications with variable or dif-
ferentiated requirements for processing lateness.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
512
Time in s
Lag in ms
Number of temporal elements
0
1000
2000
3000
4000
5000
5
10
15
20
25
30
0
1000
2000
3000
4000
5000
(a) Temporal facts
Time in s
Lag in ms
Number of temporal elements
0
1000
2000
3000
4000
5000
5
10
15
20
25
30
0
1000
2000
3000
4000
5000
(b) Temporal rules
Time in s
Lag in ms
Number of temporal elements
0
1000
2000
3000
4000
5000
5
10
15
20
25
30
0
1000
2000
3000
4000
5000
(c) Temporal facts and rules
Figure 10: Processing lag for temporal facts and rules using
the temporal nodes approach.
REFERENCES
Baader, F., Calvanese, D., McGuinness, D., Nardi, D., and
Patel-Schneider, P., editors (2003). The Description
Logic Handbook. Cambridge University Press.
Forgy, C. L. (1990). Rete: a fast algorithm for the many
pattern/many object pattern match problem. In Expert
systems: a software methodology for modern applica-
tions, pages 324–341, Los Alamitos, CA, USA. IEEE
Computer Society Press.
Hill, E. F. (2003). Jess in Action: Java Rule-Based Systems.
Manning Publications Co., Greenwich, CT, USA.
Krempels, K.-H., Christoph, U., and Wilden, A. (2009).
Jamocha – a Rule-based Programmable Agent. In In-
ternational Conference on Agents and Agent Technol-
ogy 2009 (ICAART’09), INSTICC Setubal, Porto.
Lin, P. and Krempels, K.-H. (2008). A temporal logic
extension for the rete algorithm. Technical report,
Jamocha.org.
Ross, R. G. (2003). Principles of the Business Rules Ap-
proach. Addison Wesley.
MECHANISMS FOR TEMPORAL LOGIC IMPLEMENTATION IN RULE-BASED SYSTEMS
513
