
AN INTEGRATED ARCHITECTURE FOR INFOMOBILITY
SERVICES
Advantages of Genetic Algorithms in Real-time Route Planning
C. De Castro, G. Leonardi, B. M. Masini and P. Toppan
IEIIT, Italian National Research Council and WiLab, University of Bologna, V.le Risorgimento 2, Bologna, Italy
Keywords:
Intelligent transportation systems, Real-time route planning, Virus-evolutionary genetic algorithms.
Abstract:
In the field of Intelligent Transportation Systems, a key role is played by efficient route planning services.
Such systems have been evolving rapidly, but they still have some restricting drawbacks, such as the lack of a
full support of real-time traffic monitoring and the consequent real-time update of the best route suggested.
In this paper, an architecture is proposed for the management of dynamic path planning and limitations of
traditional search algorithms in these kinds of applications discussed. A variant of the proposed approach is
consequently presented, based on the joint use of virus-evolutionary genetic algorithms for real-time route
planning and traffic forecasting.
1 INTRODUCTION
The latest study on global urbanization conducted by
the Population Division of the Department of Eco-
nomic and Social Affairs of the United Nations was
released in 2007 and predicts that, in 2050, nearly
70% of the global population will be living in larger
cities (UN, 2008).
This immense aggregation of people will surely
pose great challenges to the sustainability of modern
lifestyle, and the problem of an efficient management
of mobility stands out as one of the most relevant
ones. As a matter of fact, densely populated cities
imply the concentration (from the country) and distri-
bution (within the city) of massive amounts of people
and resources (EU, 2010).
In addition to the vast economic importance and
consequences of such situation, urban and sub-urban
mobility is a serious challenge also due to the cir-
culation of large amounts of people and goods in a
relatively small area. This poses hazards to life and
health, especially for children, the elderly, and unfa-
miliar visitors, as well as to the environment.
Urban mobility, in fact, accounts for some 30% of en-
ergy consumption and 70% of transport pollution in
Europe, and this problem is magnified by the increas-
ing population concentration in large cities.
In such a scenario, the efficient management of
traffic is a challenge that governments, industries and
researchers are forced to face worldwide. Private trav-
ellers, commercial road users, and the public sector
are continually searching for new and faster travel
routes and methods.
In this context, one of the most important applica-
tions is the support of real-time, meant as the constant
monitoring of traffic and road conditions, and the con-
sequent possible update of the routes previously sug-
gested. As a matter of fact, the best path in a given
situation can vary when traffic conditions vary and
updates should be notified to the user in real-time.
Nevertheless, up to now, no simple and marketable
product has been proposed for monitoring traffic and
providing real-time information to road users.
Roads efficiency can be substantially improved by
the deployment of Intelligent Transportation Systems
(ITS), which exploit Information and Communica-
tions Technologies (ICT) in order to provide traffic
safety and efficiency.
ICT can be considered as the foundation for car-
rying out smart navigation, meant as the paradigm
where mobile entities (vehicles and pedestrians) move
wisely through a given environment, exploiting reli-
able and timely information about traffic conditions.
New solutions are gaining interest: several projects
and consortia (ERTICO, 2010; Car2Car, 2010) and
relevant standardization bodies are working on the
development of new standards, so as to define com-
mon ITS communication architectures to let vehicles,
roadside units, and wireless infrastructures communi-
300
De Castro C., Leonardi G., M. Masini B. and Toppan P..
AN INTEGRATED ARCHITECTURE FOR INFOMOBILITY SERVICES - Advantages of Genetic Algorithms in Real-time Route Planning.
DOI: 10.5220/0003057803000305
In Proceedings of the International Conference on Evolutionary Computation (ICEC-2010), pages 300-305
ISBN: 978-989-8425-31-7
Copyright
c
2010 SCITEPRESS (Science and Technology Publications, Lda.)
cate.
However, only the knowledge and appropriate
processing of actual traffic conditions, as well as their
forecasting, can make the difference in route plan-
ning applications. The problem, thus, is (at least)
twofold: on the one hand, an efficient integrated ar-
chitecture must be designed for the management of
traffic and vehicular mobility; on the other hand, such
architecture must rely on appropriate route planning
algorithms.
As for the architecture, in this continuously evolv-
ing scenario, the Italian PEGASUS project (PEGA-
SUS, 2010) represents one of the first initiatives
proposing an infrastructure really able to attain smart
navigation in the short-medium term, on the basis of
actual traffic conditions.
The need of an efficient support for real time, though,
focuses the attention on the second aspect mentioned
above, i.e. the use of algorithms capable of adapting
to the changing environment.
In fact, even though efficient solutions and traditional
algorithms are still being applied in most commercial
systems, the ever growing dimension of the problem
suggests one should reconsider such solutions in the
broader context of intelligent infrastructures and en-
vironments.
As a matter of fact, not only could such systems bene-
fit from the use of ad-hoc architectures of Ambient In-
telligence, but, in particular, they could be greatly en-
hanced by the use of advanced algorithms from Artifi-
cial Intelligence. Recent studies indicate that the use
of genetic algorithms seems promising (Cook et al.,
2009b; Cook et al., 2009a; ElHillali et al., 2007; Ni,
2007; Zheng et al., 2004; Santos et al., 2010).
In Section 2, the PEGASUS scenario and main
strategies are presented. Section 3 describes the sys-
tem architecture. In Section 4, some drawbacks of
the proposed approach and currently adopted routing
algorithms are detailed and a variant of the core ar-
chitecture is sketched. Such variant is based on virus-
evolutionary genetic algorithms.
2 SMART NAVIGATION
SCENARIO AND STRATEGIES
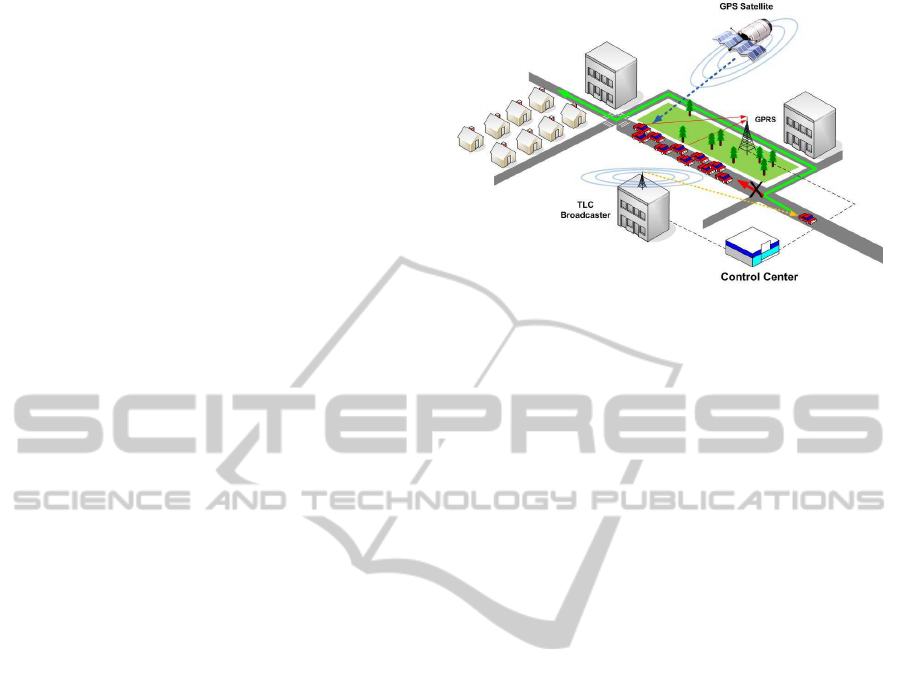
In Fig.1 the smart navigation scenario considered
is shown: vehicles are equipped with on-board
units (OBUs), which periodically transmit their speed
and position (known through the GPS integrated on
board) to a Control Center. Such data are transferred
through the General Packet Radio Service (GPRS)
network.
Figure 1: Smart navigation scenario.
The fleet equipped with OBUs is addressed as floating
car data (FCD).
In March 2010, the Italian FCD to which the PEGA-
SUS project refers, reached over 1.000.000 equipped
vehicles (OctoTelematics, 2010); this number is to in-
crease quickly (note that the number of public and pri-
vate vehicles in Italy was 34 million in 2003 (ecoage,
2003), hence the FCD is a not negligible percentage
of the overall private vehicles number).
All such data, once processed, can be exploited for
the real-time dynamic navigation of vehicles or for-
warded to public or privateinstitutions for traffic man-
agement.
The best route has to be calculated and re-
evaluated as soon as possible through a convenient
strategy; the three approaches currently investigated
are the following:
1. Centralized Strategy: evaluation of the best
route at the Control Center;
2. Distributed Strategy: on-board evaluation of the
best route;
3. Hybrid evaluation of the best route.
All the above mentioned strategies are based on
the knowledge of roads conditions on the basis of the
FCD information.
As far as the first strategy is concerned, all the data
collected from vehicles are analysed by the Control
Center. A user interested in a given trip asks the Con-
trol Center, which calculates the best route on the ba-
sis of current traffic conditions and transmits it to the
user’s on-board navigator.
In this case, the navigator is a ”dummy” entity, simply
receiving the path.
As for the distributed strategy, the Control Center
periodically transmits the up-to-date road conditions
to all the users.
In this case, thus, the best route calculation is de-
manded to the on-board navigator, which becomes a
AN INTEGRATED ARCHITECTURE FOR INFOMOBILITY SERVICES - Advantages of Genetic Algorithms in
Real-time Route Planning
301

complex and intelligent device.
The hybrid strategy represents a compromise be-
tween the aforementioned solutions. When a user
asks for a route, the Control Center returns updated
traffic conditions so that the on-board navigator can
evaluate the optimum path.
3 THE PROPOSED
ARCHITECTURE
In order to implement the above strategies, it is neces-
sary to design and develop a modular and flexible ar-
chitecture. The proposed one (Fig.2) contains a Con-
trol Center core which manages and processes all the
data collected by the FCD, so as to provide a variety
of infomobility services.
The communication between vehicles (both FCD
and users) and the Control Center is carried out by
two layers: (1) a two-way telecommunication access
network and (2) a user-system interface, the latter
performing operations of format adaptation and con-
tent scalability.
Figure 2: Main Architecture.
The components of the Control Center are detailed
separately in the following:
• Distributed Control Center (DCC): it is the
controller of the whole architecture; when receiv-
ing information (FCD speed and position samples,
best path request, etc.), the DCC forwards it to the
modules in charge of its processing. In the oppo-
site way, the DCC makes the outgoing data (traffic
updates, best path response, etc.) available to the
user-system interface and the telecommunication
access network.
• Dynamic Routing Engine (DRE): it is the rout-
ing engine, and is the module that will be re-
disigned taking genetic algorithms into consider-
ation.
In the current implementation, the DRE deter-
mines the best route applying a Dijkstra-like al-
gorithm to three kinds of information: (1) static,
i.e. the travel time of each road segment in the
absence of traffic; (2) dynamic, based on actual
travel time data measured by the FCD; (3) fore-
cast, i.e. travel time based on traffic forecasts.
All the static, dynamic and forecast information
are stored in specific databases. The DRE can also
handle Points Of Interest (POIs) along the route,
finding the optimal path that allows to reach a set
of POIs; this, for instance, can be very useful for
touristic purposes.
• Traffic Control Center (TCC): it is the module
which processes position and speed samples from
vehicles and evaluates the real-time traffic condi-
tions, in particular, the actual travel time needed
to go through a particular road. The TCC also
performs arithmetic, weighted and temporal aver-
age operations in order to estimate the real traffic
conditions of all the segments of the road map.
• Traffic Forecasting Centre (TFC): it is the mod-
ule that analyzes current and historical traffic in-
formation and their trend, forecasting the traffic
evolution over time.
Also this module will be involved in the architec-
ture revision based on genetic algorithms.
All the components described so far make use of
databases storing all the information required for the
processing phases: users, profiles, maps, paths, POIs.
The overall architecture in Fig.2 can be ideally di-
vided into four quadrants, as indicated by the different
colours, in order to highlight the four different kinds
of interaction processes developed.
1. The FCD Sampling. Vehicles belonging to the
FCD fleet are equipped with an OBU, so they send
their position and speed to the Control Center
through the telecommunication access network.
2. Best Path Request. On-boardnavigationdevices,
rather than planning routes using their own static
local cartography, could require a real-time short-
est path calculation to the Control Center. In this
kind of interaction, only required for centralized
or hybrid strategies, the on-board navigator sends
a message to the Control Center, setting the cur-
rent position and the required destination, beyond
eventual POIs along the path. Such request is pro-
cessed in Control Center, forwarded by the DCC
to the DRE, in chargeof calculating the best route.
ICEC 2010 - International Conference on Evolutionary Computation
302

3. Best Path Notification. This type of interaction
is only required for the on-board strategy. The
Control Center returns a route based on real-time
traffic data, taking into account traffic jams, car
crashes and actual travel times measured by the
FCD. The response given by the DRE is based on
both the data stored in the static Maps database
and all the real-time updates stored in its dynamic
portion, properly integrated by the traffic forecasts
coming from the TFC. The route is returned to
the on-board navigator through a message listing
all the road intersections or milestones needed to
reach the destination.
4. Links Update. This type of interaction is only
meant for the on-board and hybrid strategies. Us-
ing the telecommunication network, it is possible
to send information about updates of the travel
times in an asynchronous way. Each on-board
navigator is thus able to update the road segments
conditions, achieving thus a sort of ”distributed
navigation intelligence”.
By means of this real-time updated information,
transmitted periodically through the telecommu-
nication network, each on-board navigator can
thus apply a routing algorithm which takes into
account the actual traffic conditions, so as to avoid
problematic situations.
4 AN EVOLUTION OF THE
PROPOSED ARCHITECTURE
BASED ON GENETIC
ALGORITHMS
As described in previous sections, the best path in a
given situation can vary when traffic conditions vary
and updates should be notified to the user in real-time
(Bonnifait et al., 2007; Chen et al., 2007; Jula et al.,
2008; Najjar and Bonnifait, 2007).
If such a feature were enhanced through the use of
appropriate algorithms from Artificial Intelligence, it
would naturally become an integrant part of advanced
navigators in intelligent environments (Cook et al.,
2009b; Cook et al., 2009a; ElHillali et al., 2007; Ni,
2007; Zheng et al., 2004; Santos et al., 2010).
For instance, the methodologies described so far
could greatly benefit from the use of genetic algo-
rithms instead of traditional search methods. In par-
ticular, on the basis of recent studies on dynamic en-
vironments, a variant of the proposed architecture is
here discussed where virus-evolutionary genetic al-
gorithms replace traditional methods in the Dynamic
Routing Engine and in the Traffic Forecasting Centre.
In order to better explain this viewpoint, some
considerations must be made.
4.1 Exact Routing Algorithms
The solution discussed hereto and all similar ones
arise from classic problems of shortest path finding
in the static case and try to extend them to real-time
route planning, taking into consideration traffic anal-
ysis, forecasting and path updating.
In particular, the algorithm used so far in the Pegasus
system is a classic variant of Dijkstra. In this kind
of approach, a map is represented by a graph whose
nodes are intersections of roads and whose arcs rep-
resent segment of routes. If no traffic conditions are
considered, arcs are weighted by means of lengths be-
tween nodes. In the dynamic case considered, in order
to represent traffic conditions, length is substituted by
time-varying, actual travel times.
On the basis of data collected about road conditions,
arcs are periodically assigned updated weights and
routes may change consequently.
In context of static environments, shortest path
problems are generally solved in this way, by means
of exact algorithms such as Dijkstra. Many variants
and different approaches were proposed in order to
guarantee better performances, such as A
∗
and many
others, and further variants were also proposed in or-
der to face the real-time case, such as RTA
∗
and PHA
∗
(In-Cheol, 2006; Felner et al., 2004; Korf, 1990). The
variants mentioned above make use of heuristic func-
tions and, step by step, determine a suitable nextmove
until a suboptimal solution is found.
Still, one of the main drawbacks of such ap-
proaches is that, even though adapted to the real-time
case, these algorithms consider only one solution at
a time and do not deal with the entire route until
the end. In consequence, route evaluation is slow;
furthermore, proposing the same alternative to many
clients can give raise to new congestions.
4.2 The Genetic-based Approach
These considerations indicate that the parallel analy-
sis of many solutions could improve the overall per-
formance of the system. In particular, (Kanoh, 2007;
Kumar et al., 2009; Yuecong et al., 2007) suggested
that genetic algorithms could be applied to dynamic
route planning.
With respect to traditional search algorithms, the ge-
netic approach considers many and entire solutions at
a time, so it acquires knowledge and improves the set
of candidate solutions during the search process. The
AN INTEGRATED ARCHITECTURE FOR INFOMOBILITY SERVICES - Advantages of Genetic Algorithms in
Real-time Route Planning
303
efficiency of global search improves the limits of tra-
ditional algorithms.
Yet, genetic algorithms applied to dynamic route
planning present a limit: although directed by the fit-
ness function, the stress is on random search rather
than directional, as it should be in order to solve local
traffic problems.
4.3 The Virus-enhanced Variant
An alternative which optimizes the genetic approach
and seems to overcome the above limits was pro-
posed in (Kanoh, 2007) and enhances genetic algo-
rithms through viral mutations. The basic idea is that,
whereas in the static case diversity in the population
is a key factor to reach convergence, in dynamic en-
vironments evolvability is also needed, meant as the
ability of members to change to meet the new require-
ments of the dynamic environment. This feature can
be guaranteed using viral mutations. As a matter of
fact, whereas typical genetic algorithms may not be
able to solve large-scale problems within a practical
amount of time, viruses give a direction to the search,
improving thus search rate, quality of solutions and
speeding the whole process up.
In a general virus-enhanced genetic algorithm
(VEGA), two kinds of population are considered: the
traditional host population of candidate solutions and
a virus population (more properly, a substring set).
First, viruses infect the host population (horizontal
propagation), then viruses are transmitted to offspring
(vertical inheritance).
In more detail, a VEGA includes genetic operators
and virus infection operators, namely reverse tran-
scription and transduction. When reverse transcrip-
tion is applied, a virus transcribes its content on the
string of a host individual; in case of transduction, a
virus transduces a substring from the host individual.
The virus-infection operators defined in this way
are added to the usual selection, crossover and muta-
tion ones.
To some extent, viruses can be regarded as local
changes that can be used to enhance modifications
in specific parts of the whole solution space. A part
of a road is considered as a virus and a population
of viruses is generated in addition to a population of
routes. Crossover and infection together determine
the near-optimal combination of viruses. When traf-
fic congestion varies, a better route is determined in
real-time using viruses and other routes in the popu-
lation.
The results in (Kanoh, 2007), which simulates
28.000 cars in Northern Tokio, is that genetic algo-
rithms improve the performance of exact algorithms
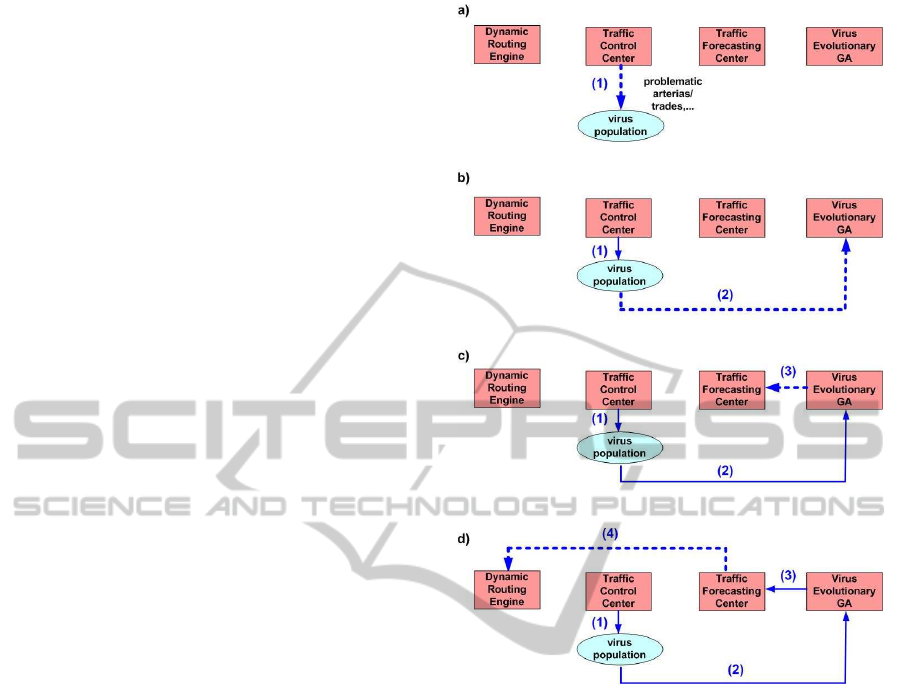
Figure 3: Virus-based variant of the Routing Engine and
Forecasting Center.
in both the static and dynamic case and, if further mu-
tations are applied, based on viral infections, the dy-
namic case can be solved even more quickly.
In dynamic route planning environments, fore-
casting models are the premise for developing ur-
ban Intelligent Transportation Systems. In (Yuecong
et al., 2007), a proposal can be found which applies
genetic algorithms to traditional forecasting models.
Our proposal is that virus-enhanced genetic algo-
rithms could be applied to the PEGASUS system in
order to improve its overall performance and, in more
detail, to use viruses to drive the search of better solu-
tions directly where traffic jams and problematic situ-
ations are detected.
Fig. 3 shows how the core of the proposed architec-
ture can be modified. First, on the basis of data traf-
fic analysis made by the Traffic Control Center, suit-
able viral populations could be defined representing
the most problematic trades (Fig. 3a). This popula-
tion could be used to define the viral population of a
Virus Evolutionary Genetic Algorithm (Fig. 3b), so
ICEC 2010 - International Conference on Evolutionary Computation
304

as to direct genetic operations in such areas. This al-
gorithm could be directly applied to feed the Traffic
Forecasting Center (Fig. 3c). The traffic flow deter-
mined in this way could be directly used by the Dy-
namic Routing Engine (Fig. 3d).
5 CONCLUSIONS
In this paper an architecture was described for the
constant monitoring of road conditions and the con-
sequent real-time update of routes affected by prob-
lematic traffic conditions.
The system relies on a Dijkstra-likealgorithm and,
since this approach is not suitable to handle dynamic
large-scale problems, a first bibliographic research
was carried out in order to compare differentsolutions
to the search of optimal routes in the real-time case.
Some authors indicate that good performances can be
achieved using virus-evolutionary genetic algorithms,
and a variant of the proposed architecture was conse-
quently sketched.
Future work will be devoted to the refinement of the
considered approach and to suitable simulations.
ACKNOWLEDGEMENTS
This work was supported by the PEGASUS project,
financed by the Italian Ministry of Economic Devel-
opment.
REFERENCES
Bonnifait, P., Jabbour, M., and Dherbomez, G. (2007).
Real-time implementation of a gis-based localization
system for intelligent vehicles. EURASIP Journal on
Embedded Systems.
Car2Car (2010). Car-to-car communication consortium.
Website. http://www.car-to-car.org/.
Chen, Y., Bell, M., and Bogenberger, K. (2007). Reliable
pretrip multipath planning and dynamic adaptation for
a centralized road navigation system. IEEE Transac-
tions on Intelligent Transportation Systems, 8(1):14–
20.
Cook, D. J., Augusto, J. C., and Jakkula, V. R. (2009a). Am-
bient intelligence: Technologies, applications, and op-
portunities. Pervasive Mob. Comput., 5(4):277–298.
Cook, D. J., Hagras, H., Callaghan, V., and Helal, A.
(2009b). Making our environments intelligent. Per-
vasive Mob. Comput., 5(5):556–557.
ecoage (2003). Independent ecology portal. Website.
http://www.ecoage.net/.
ElHillali, Y., Rivenq, A., Tatkeu, C., Rouvaen, J., and
Ghys, J. (2007). Embedded localization communica-
tion system designed for intelligent guided transports.
EURASIP Journal on Embedded Systems, 19(2):–.
ERTICO (2010). Cvis project. Website.
http://www.cvisproject.org/.
EU (2010). Eu mobility and transport. Website.
http://ec.europa.eu/transport/publications/statistics/.
Felner, A., Stern, R., Kraus, S., Ben-Yair, A., and Ne-
tanyahu, N. (2004). Pha*: Finding the shortest path
with a* in an unknown physical environment. Journal
of Artificial Intelligence Research (JAIR), 21(1):631–
670.
In-Cheol, K. (2006). Knowledge-Based Intelligent In-
formation and Engineering Systems, chapter Real-
Time Search Algorithms for Exploration and Map-
ping. Springer, Berlin/Heidelberg.
Jula, H., Dessouky, M., and Ioannou, P. A. (2008). Real-
time estimation of travel times along the arcs and ar-
rival times at the nodes of dynamic stochastic net-
works. IEEE Transactions on Intelligent Transporta-
tion Systems, 9(1):97–110.
Kanoh, H. (2007). Dynamic route planning for car navi-
gation systems using virus genetic algorithms. Inter-
national Journal of Knowledge-based and Intelligent
Engineering Systems, 11(1):65–78.
Korf, R. (1990). Real-time heuristic search. Artificial Intel-
ligence, 42(3):189–211.
Kumar, A. J. S., Arunadevi, J., and Mohan, V. (2009).
Intelligent transport route planning using genetic al-
gorithms in path computation algorithms. European
Journal of Scientific Research, 25(3):463–468.
Najjar, M. and Bonnifait, P. (2007). Road selection us-
ing multicriteria fusion for the road-matching prob-
lem. IEEE Transactions on Intelligent Transportation
Systems, 8(2):279–291.
Ni, D. (2007). Determining traffic-flow characteristics by
definition for applications in its. IEEE Transactions
on Intelligent Transportation Systems, 8(2):181–187.
OctoTelematics (2010). Octotelematics s.r.l. Website.
http://www.octotelematics.it/.
PEGASUS (2010). Pegasus project. Website.
http://pegasus.octotelematics.com.
Santos, A. C., Cardoso, J. M., Ferreira, D. R., Diniz, P. C.,
and Chainho, P. (2010). Providing user context for
mobile and social networking applications. Pervasive
Mob. Comput.
UN (2008). World urbanization prospects: The
2007 revision population database. Website.
http://esa.un.org/unup/.
Yuecong, S., Wei, H., and Guotang, B. (2007). Combined
prediction research of city traffic flow based on ge-
netic algorithms. In Proc. of the Eighth International
Conference on Electronic Measurement and Instru-
ments ICEMI 2007.
Zheng, N., Tang, S., Cheng, H., Lei, Q. G., and Wang, E.
(2004). Toward intelligent driver-assistance and safety
warning systems. IEEE Intelligent Systems, 19(2):–.
AN INTEGRATED ARCHITECTURE FOR INFOMOBILITY SERVICES - Advantages of Genetic Algorithms in
Real-time Route Planning
305
