
AN ASSESSMENT OF HEURISTICS FOR FAST SCHEDULING OF
GRID JOBS
Florian M¨oser, Wolfgang S¨uß, Wilfried Jakob, Alexander Quinte and Karl-Uwe Stucky
Institute for Applied Computer Science, Karlsruhe Institute of Technology, P.O. Box 3640, D-76021, Karlsruhe, Germany
Keywords:
Scheduling, Benchmarks, Heuristics, Computational grid, Restricted resources.
Abstract:
Due to the dynamic nature of the grid and the frequent arrival of new jobs, rescheduling of already planned
and new jobs is a permanent process that is in need of good and fast planning algorithms. This paper extends
previous work and deals with newly implemented heuristics for our Global Optimizing Resource Broker and
Allocator GORBA. Of a range of possibly usable heuristics, the most promising ones have been chosen for
implementation and evaluation. They serve for the following two purposes: Firstly, the heuristics are used to
quickly generate feasible schedules. Secondly, these schedules go into the start population of a subsequent run
of our Evolutionary Algorithm incorporated in GORBA for improvement. The effect of the selected heuristics
is compared to our best simple one used in the first version of GORBA. The investigation is based on two
synthetically generated benchmarks representing a load of 300 grid jobs each.
A formal definition of the scheduling problem is given together with an assessment of its complexity. The
results of the evaluation underline the described intricacy of the problem, because none of the heuristics
performs better than our simple one, although they work well on other presumably easier problems.
1 INTRODUCTION
Planning of jobs and resources of a computational
grid is a complex optimization task, if the interests
of both resource providers and users are taken into
account and the resources are modeled with the nec-
essary detail. This will be described in the second
section, where a formal definition of the problem will
be given as well. In this paper we report about an
investigation of four heuristics which have been se-
lected out of seven well-known ones. They are com-
pared to the best simple method used in our Global
Optimizing Resource Broker and Allocator GORBA
(S¨uß et al., 2007; Jakob et al., 2008; Jakob et al.,
2009). GORBA pursues a two-step planning and op-
timization strategy: after a fast heuristic construc-
tion of feasible, but suboptimal schedules, the latter
are improved by our Evolutionary Algorithm (EA)
GLEAM (Global Learning Evolutionary Algorithm
and Method) (Blume, 1991; Blume and Jakob, 2009).
The motivation was to find better heuristics so that
either the subsequent EA run gets a better start pop-
ulation or becomes superfluous. GLEAM is an EA
of its own, which includes elements from traditional
Evolution Strategies and real-coded Genetic Algo-
rithms. Here it is used to determine the processing
sequence of the grid jobs and to choose a resource se-
lection strategy out of three possible ones. The latter
are described in section 3.2.2. Usage of a heuristic
resource allocation has proven to yield good results
faster than a gene model, where both resources and
grid job sequence are determined by evolution (Jakob
et al., 2008).
In section 3 the choice of the heuristics is ex-
plained and the heuristics are described in more de-
tail. Section 4 reports about the results and the bench-
marks used. The work is summarized and an outlook
is presented in section 5.
As we concentrate on the investigation of four
different scheduling heuristics here, the benchmarks,
GORBA, and GLEAM are described only very briefly
due to the lack of space. The interested reader is re-
ferred to (S¨uß et al., 2007) for a detailed description
and explanation of the benchmark construction and to
(Jakob et al., 2008; Jakob et al., 2009) for GORBA,
where a survey of related work is also given, espe-
cially of EA-based scheduling in the grid domain. An
up-to-date description of GLEAM can be found in
(Blume and Jakob, 2002) and in (Blume and Jakob,
2009), where the algorithm is described in detail and
various real-world applications are introduced.
184
Möeser F., Süß W., Jakob W., Quinte A. and Stucky K. (2010).
AN ASSESSMENT OF HEURISTICS FOR FAST SCHEDULING OF GRID JOBS.
In Proceedings of the 5th International Conference on Software and Data Technologies, pages 184-191
DOI: 10.5220/0002919201840191
Copyright
c
SciTePress

2 PROBLEM DEFINITION
The users of a grid describe their application jobs,
consisting of one or more elementary grid jobs, by
workflows, each of which may be regarded a directed
acyclic graph defining precedence rules between the
grid jobs. The users state which resources like soft-
ware, data storage, or computing power are needed
to fulfill their grid jobs. Resources may depend on
other ones. A software tool, for instance, may require
a certain operating system and appropriate computer
hardware to run on. This leads to the concept of co-
allocation of resources. Furthermore, users specify
due dates and cost budgets and may express a pref-
erence for cheap or fast execution. The execution
times of the grid jobs, which are necessary for plan-
ning, are either estimations or values based on experi-
ence. Resources are offered at variable costs depend-
ing on e.g. day time or day of the week and their
usage may be restricted to certain times according to
the policy of their owners. In addition, heterogeneous
resources usually differ in performance as well as in
cost-performance ratios.
To meet the different needs of resource users and
providers, the following four objectives are consid-
ered: completion time and costs of each application
job, measured and averaged as fulfillment of user-
given limits, and to meet the demands of resource
providers, the total makespan of all application jobs
and the ratio of resource utilization. Some of these
criteria, like costs and time, are obviously conflicting.
As grid jobs are assumed to require computing
time in the magnitude of several minutes at the mini-
mum, a certain but limited time frame for planning is
available. A time limit of three minutes was regarded
reasonable for planning. Changing an existing plan is
the usual situation, because e.g. new application jobs
or resources enter the system more or less frequently.
All grid jobs that will be started within this time slot
according to the old schedule are regarded fixed jobs
and will not be subject of (re)scheduling (Jakob et al.,
2009).
A notation common to the scheduling literature
(Brucker, 2004; Brucker, 2006) is used to facilitate
comparisons with other scheduling problems. Given
are a set M of resources, a set J of application jobs,
and a set O of grid jobs. The n grid jobs of appli-
cation job J
i
are denoted O
i1
,...,O
in
. The following
functions are given:
• a precedence function p : O × O → { TRUE,
FALSE} for the grid jobs
• an assignment function µ : O → P (P (M)) from
grid jobs to resource sets. P (M) is the power set
of M. µ
ij
is the set of all possible combinations
of resources from M, which together are able to
perform the grid job O
ij
• a function t : O× P (M) → R, which describes the
time needed to process each grid job O
ij
on a re-
source set R
ij
∈ µ
ij
• a cost function, c : R × P (M) → R, which de-
scribes the cost per time unit of the given resource
set for each time z ∈ R
Optimization is done by choosing suitable start times
s(O
ij
) ∈ R and resource allocations R
ij
∈ µ
ij
. A valid
solution must meet the following two restrictions:
1. All grid jobs are planned and resources are allo-
cated exclusively:
∀ O
ij
: ∃ s(O
ij
) ∈ R,R
ij
∈ µ
ij
: ∀M
j
∈ R
ij
:
M
j
is in[s(O
ij
);s(O
ij
) +t(O
ij
,R
ij
)] exclusively
allocated by O
ij
.
2. Precedence relations are adhered to:
∀ i, j 6= k : p(O
ij
,O
ik
) ⇒
s(O
ik
) ≥ s(O
ij
) + t(O
ij
,R
ij
)
A violation of the two following soft constraints is
treated by penalty functions such that the amount of
time and cost overruns is considered as well as the
number of application jobs affected.
1. All application jobs J
i
have a cost limit c
i
, which
must be observed:
∀ i : c
i
≥
n
i
∑
j=1
s(O
ij
) + t(O
ij
,R
ij
)
Z
s(O
ij
)
c(z,R
ij
) dz
2. All application jobs J
i
have due dates d
i
, which
must be adhered to:
∀ i : d
i
≥ s(O
in
) + t(O
in
,R
in
)
where O
in
is the last grid job of J
i
.
The fitness calculation is based on the above-
mentioned four objectives and an auxiliary objective
described in (Jakob et al., 2008). Lower and upper
estimations of costs and processing times are calcu-
lated in the first planning stage of GORBA described
in section 3. Except for the utilization rate the relative
value rv
i
of each criterion i is calculated based on its
actual value v
i,act
relative to these limits:
rv
i
=
v
i,act
− v
i,min
v
i,max
− v
i,min
This makes the single values rv
i
independent of
the task on hand and results in a percentage-like
range. These values are weighted and summed up
AN ASSESSMENT OF HEURISTICS FOR FAST SCHEDULING OF GRID JOBS
185

which yields the raw fitness, again in a percentage-
like range. Due to the nature of the problem, values
of 100% or close to 100% are unlikely for nontrivial
cases. Values greater than 50% can usually be consid-
ered good results. To avoid unwanted compensation
effects, the criteria are sorted separately or in groups
according to priorities. The criteria of the highest pri-
ority always contribute to the sum, whereas the oth-
ers are added, if all criteria of the next higher priority
fulfill a given threshold value. Weights and priorities
are based on experience and aimed at reaching a fair
compromise between users and resource providers. If
the two soft constraints are violated, the raw fitness is
lowered to the end fitness by a multiplication by the
corresponding penalty function, each of which deliv-
ers a factor between 0 and 1. Otherwise, end and raw
fitness are identical.
Generalizing, this task contains a special case of
the job shop scheduling problem. The extensions
are co-allocation of heterogeneous and alternative re-
sources of different performances and time-dependent
availability and costs, earliest start times and due
dates, parallel execution of grid jobs, and multiple ob-
jectives. As our task includes the job shop problem,
it is NP-complete. For this reason and because of the
three minutes runtime limit, only approximated solu-
tions can be expected.
A comparable problem could not be found in liter-
ature, see e.g. (Brucker, 2004; Brucker, 2006) whith a
comprehensive presentation of scheduling problems.
This corresponds to the results of the literature review
found in (Set¨amaa-K¨arkk¨ainen et al., 2006). There, it
is concluded that only few publications deal with mul-
tiple objectives in scheduling and, if so, they mostly
deal with single machine problems.
3 HEURISTICS
In order to find better heuristics than the currently
used ones, a literature study was performed (M¨oser,
2009). In this study a number of heuristics were con-
sidered and some of them were selected for further
investigation.
3.1 Considered Heuristics
There are currently four heuristics available in
GORBA. These are three simple heuristics (S¨uß et al.,
2007) and an adaptation of the Giffler Thompson Al-
gorithm (GTA) (Giffler and Thompson, 1960; Neu-
mann and Morlock, 2002). To our surprise, the
adapted version of the GTA neither yielded better re-
sults than our best simple heuristic method, nor were
the results appropriate seeds for the subsequent EA
run (Jakob et al., 2008; Sonnleithner, 2008). The best
simple heuristic is the Shortest Due Date Heuristic
(SDD) described in section 3.2.2. As the two others
yield only poor results as well, other heuristics were
searched for in a subsequent investigation (M¨oser,
2009). They were evaluated in order to select some
of them for implementation and further investigation.
The methods were assessed according to statements
from literature. The criteria were problem coverage,
reliability, adaptability with respect to the problem on
hand, speed, quality of results, and possible value for
GLEAM. The considered heuristics are appropriate
variants of the following ones, of which the first four
met the criteria for further investigation:
• List Scheduling
• Shifting Bottleneck
• Taboo Search
• GRASP
• Branch & Bound
• Lagrange Relaxation and Neural Networks
• Simulated Annealing
3.2 Investigated Heuristics
The implemented versions of the heuristics List
Scheduling, Shifting Bottleneck, Taboo Search and
GRASP (Greedy Randomized Adaptive Search Pro-
cedure) will be introduced briefly hereinafter. They
all assign resources to grid jobs and use selection
strategies for scheduling, which are presented first.
Also, a short description is given for the SDD which
presently is the best performing heuristic in GORBA
and hence serves as a reference for assessing the four
new scheduling heuristics.
3.2.1 Selection Strategies
Several selection strategies which can be divided into
grid job selection strategies (JSS) and resource selec-
tion strategies (RSS) are used. If it is not clear which
grid job should be scheduled next, one of these JSS
is applied, if not stated otherwise. The implemented
strategies select a grid job according to the following
rules:
• ShortestJob: grid job with the shortest duration
• LongestJob: grid job with the longest duration
• MostSuccessors: grid job with the greatest num-
bers of successors
• EarliestStart: grid job with the earliest possible
start time
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
186

• LeastRemainingTime: grid job where the differ-
ence between the maximal end time of the corre-
sponding application job and the earliest possible
start time of that grid job is minimal
Selecting a resource for a grid job works similarly.
The implemented strategies select a resource accord-
ing to the following rules:
• Cheapest: fastest one of all cheapest resources
• Fastest: cheapest one of all fastest resources
• Pref: “Cheapest” or “Fastest”, depending on the
user’s preference stored in the application job
• EarliestStart: earliest available resource
• MostRemaining: minimally used resource
3.2.2 Shortest Due Date Heuristic
This heuristic first creates a grid job sequence by or-
dering the grid jobs of all application jobs by their
due dates, beginning with the application job to be
finished first. The resulting job sequence is processed
by one of three resource allocation strategies (RAS).
The different RAS assign resources to grid jobs ac-
cording to the following rules:
• RAS-1: fastest one of the earliest available re-
sources
• RAS-2: cheapest one of the earliest available re-
sources
• RAS-3: RAS-1 or RAS-2, depending on time/cost
preference of the application job
SDD yields three solutions each of which goes into
the initial population of the subsequent GLEAM run.
The best, of course, is regarded as the preliminary re-
sult which should be improved by GLEAM or with
which the new heuristics are compared.
3.2.3 List Scheduling
List Scheduling (LS) is a simple heuristic that creates
a schedule by first putting all grid jobs into a list as
described below and afterwards assigning resources
to the grid jobs. It is an adaptation of the ideas out-
lined in (Schuster, 2003). The RSS used is a strategy
parameter of this procedure. List Scheduling is deter-
ministic and consists of the following steps:
1. Creation of the list
First, all grid jobs are put into a list by using a
path-based approach. From all application jobs,
all possible paths are built from the first to the last
grid jobs. As a result, grid jobs are contained in
various paths, if the application job has parallel
branches. Then, all paths are processed iteratively
and for each path the first grid job is removed (it
is also removed from all other paths containing
that grid job). The removed grid job is added to
the list. This is done until all paths are empty.
The list now contains the resulting grid job se-
quence. This method maintains the precedence
rules of grid jobs.
2. Scheduling of the list
Finally, the resulting schedule is built by choosing
a resource and a time slot for every grid job using
the given RSS.
3.2.4 Shifting Bottleneck
Variants of Shifting Bottleneck (SB) for job shop
scheduling are described for example in (Adams et al.,
1988), in (Dauz`ere-P´er`es and Lasserre, 1993), and
for parallel resources in (Chen et al., 2006). Unfor-
tunately, none of them deals with inhomogeneous re-
sources, which is why another approach must be used.
The implemented version builds resource groups with
associated grid jobs and schedules the grid jobs using
the resources of the respective group only. The result-
ing schedules are ordered by a bottleneck criterion as
described below. Using the results of these schedules,
the final schedule is created and returned. An RSS is
used as a strategy parameter. SB is deterministic and
comprises the following steps:
1. Creation of resource groups
Each grid job has one ore more usable resources.
For each grid job a resource group consisting of
these resources is built. If a group that is going
to be created contains exactly the resources of an
already existing one, a reference to that group will
be established instead of creating a new one. If a
resource group is built, which contains only some
resources overlapping with resources from other
resource groups, the overlapping resource will be
removed from the group with more resources or,
if two groups have the same number of resources,
from the newer one. In case a resource group is
emptied, it is removed and the corresponding grid
jobs are associated with the remaining group. Af-
ter this step, each resource group contains at least
one resource and at least one associated grid job.
2. Scheduling of resource groups
In the next step the grid jobs of each resource
group are scheduled using the resources of the
respective resource group only. The scheduling
order of grid jobs is given by the order in which
they were added to the group and the resource for
a grid job is chosen by the given RSS. When all
grid jobs of a resource group have been processed,
they have a temporary start time which will be
AN ASSESSMENT OF HEURISTICS FOR FAST SCHEDULING OF GRID JOBS
187

used later as an order criterion. The total lateness
(or earliness) of each resource group is calculated
and the groups are ordered from biggest lateness
to biggest earliness.
3. Creating the final schedule
Finally, all grid jobs are scheduled again, this
time using all available resources. The order of
scheduling the grid jobs is given firstly by the or-
der of resource groupsand secondly by the tempo-
rary start times of their grid jobs, beginning from
the earliest start time. This means that all grid jobs
belongingto the first resource group are scheduled
before those of the second resource group and so
on. Thus, bigger bottlenecks have more “schedul-
ing freedom”, whereas smaller bottlenecks have
less freedom due to already allocated resources
and time slots. Precedence rules are adhered to.
The given RSS is used to select one resource for
each grid job.
3.2.5 Taboo Search
Taboo Search (TS) is a heuristic with random ele-
ments. It creates a schedule in x steps, where x is
the number of grid jobs to be scheduled. There is a
JSS and an RSS for each step. These chains of strate-
gies are used as the representation of a solution. This
approach yields a feasible schedule for each solution
and was originally presented by (Baykaso˘glu et al.,
2002). Another approach is to use the grid job se-
quence as the representation, as done in GLEAM. To
change a solution, the JSS and/or RSS are exchanged
as described below. Various solutions are declared
“taboo” during the process, as common with TS. They
may be used further in special cases only. They are
stored in a taboo list which is a First-In-First-Out list
of a specific size. Taboo search performs a number
of iterations, creating solutions in each iteration. The
currently best solution is always saved. The following
steps are conducted in the heuristic:
1. Setup
In this step, the taboo list size tl
size
, the number of
solutions per iteration tl
i
, the minimal number of
changes of JSS jc
min
and RSS rc
min
after each it-
eration and the likelihood l of accepting a change
are set. An initial solution is created by choos-
ing a random JSS and RSS from the pool for each
step. The schedule for this solution is computed
and evaluated.
2. Updating solutions
Starting from the initial solution, a number of it-
erations is performed. In each iteration tl
i
so-
lutions are created by exchanging strategy rules
from the initial solution with randomly chosen
ones from a pool. The number of changes depends
on jc
min
and rc
min
respectively. The parameters
jc
min
, rc
min
, and l are adapted during the process
such that the chance of a change is increased with
the number of unsuccessful iterations (i.e. an it-
eration that did not improve the currently best so-
lution). If there is a successful iteration, the three
parameters will be reset to their original values.
In each iteration the schedules for the solutions
are created by choosing one of the grid jobs that
have no unscheduled predecessor by the current
JSS and by selecting a resource for the chosen grid
job by the current RSS. The resulting schedule is
evaluated using the criteria of cost and makespan
only. A solution is better than another one, if its
schedule is better than that of the other. The so-
lutions that are worse than the initial one are put
into the taboo list. The Pareto optimal solutions
from that list are aspirants. The best non-taboo
solution is chosen as the new initial one. If no
non-taboo solution exists, the best aspirant is cho-
sen instead. If the new initial solution is better
than the currently best one, the latter is updated.
If a given number of iterations or a given amount
of time has passed, the schedule of the currently
best solution is returned as the final result.
3.2.6 GRASP
The main idea of GRASP presented in (Pitsoulis and
Resende, 2001) has been adapted to the task on hand.
The adapted implementation makes use of the same
solution representation as taboo search. To create a
schedule for a solution, x steps are needed, where x is
the total number of grid jobs. Although the represen-
tation is the same, the resulting schedule is different,
because the methods of solution creation and schedul-
ing used in GRASP are different. An RCL (restricted
candidates list) is used to select grid jobs to be sched-
uled. GRASP is a multi-start heuristic, which means
that there are multiple independent iterations. In each
iteration one solution is produced. The currently best
solution is always saved. GRASP is stochastic and
consists of the following steps:
1. Setup
In this step the maximal size max and the tuning
parameter α for the RCL are set. A high value
of α means more random behavior, whereas a low
value means more greediness.
2. GRASP iterations
A number of GRASP iterations are performed.
After a given number of iterations or a given
amount of time has passed, the schedule of the
currently best solution is returned. Each iteration
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
188
works as follows: A solution is created by choos-
ing x JSS and RSS at random from the pool of
selection strategies. Afterwards, a schedule is cre-
ated from that solution. At all times, a list of grid
jobs without predecessors exists. Let that list be
L
1st
. In each step, the RCL consists of the first
max grid jobs from L
1st
. The RCL is ordered by
the criterion reflected by the current JSS. One of
the first α% of the grid jobs in the RCL is selected
randomly and removed from L
1st
. All successors
of that grid job are added to L
1st
, if they do not
have any other predecessors that are still in that
list. The removed grid job is assigned a resource
using the current RSS. When L
1st
is empty, the
schedule was created and is evaluated. The cur-
rently best solution will be updated, if it is unde-
fined or if the newly created one is better.
4 EXPERIMENTAL RESULTS
In order to compare the new heuristics with our SDD,
different benchmark tests have been performed. The
setup and the results of these benchmarks are pre-
sented below.
4.1 Benchmarks
The benchmarks used are created synthetically which
allows for controllable diversity, as opposed to most
benchmarks originating from real-world applications,
see also (S¨uß et al., 2007).
The characteristics of total number of application
jobs N, total number of grid jobs n, variation of grid
job number n
var
, average number of resources per
grid job R
avg
, variation of resource number R
var
, and
average degree of dependencies d ∈ [0.0, 1.0] are used
to categorize a benchmark scenario. There are N ap-
plication jobs to be scheduled in the scenario. Each
application job consists of an average of N/n grid
jobs. This number may vary by an amount of n
var
percent, but the total number of grid jobs is fixed.
Each grid job has an average of R
avg
usable resources.
This number may vary by an amount of R
var
. The de-
gree of dependenciesd indicates the parallelism of the
workflow or how much the grid jobs depend on each
other. For d = 0.0 all grid jobs are parallel and for
d = 1.0 there is no parallelism at all. Table 1 shows
the parameters used to create the benchmarks sl300
and ll300. The first letter denotes the freedom of re-
source selection, the second one the average degree of
dependencies. Both can either be s (small) or l(large).
A large degree of dependencies was chosen, because
Table 1: Parameters used for creating the benchmark sce-
narios.
PARAMETER sl300 ll300
Total no. of application jobs N 60 60
Total no. of grid jobs n 300 300
Variation of grid job no. n
var
0.3 0.3
Avg. res. no. per grid job R
avg
3 8
Variation of resource number R
var
1 2
Avg. degree of dependencies d 0.9 0.9
such benchmarks were the hardest ones in previous
investigations (Jakob et al., 2008; Jakob et al., 2009).
As in earlier experiments, time and cost budgets
were set such that our simple SDD heuristic could not
solve them. The following criteria were applied for
assessing the heuristics:
• Does the heuristic yield a schedule that adheres to
the budgets?
• How do the fitness values compare to the each
other?
• Do the results improve the subsequent GLEAM
run?
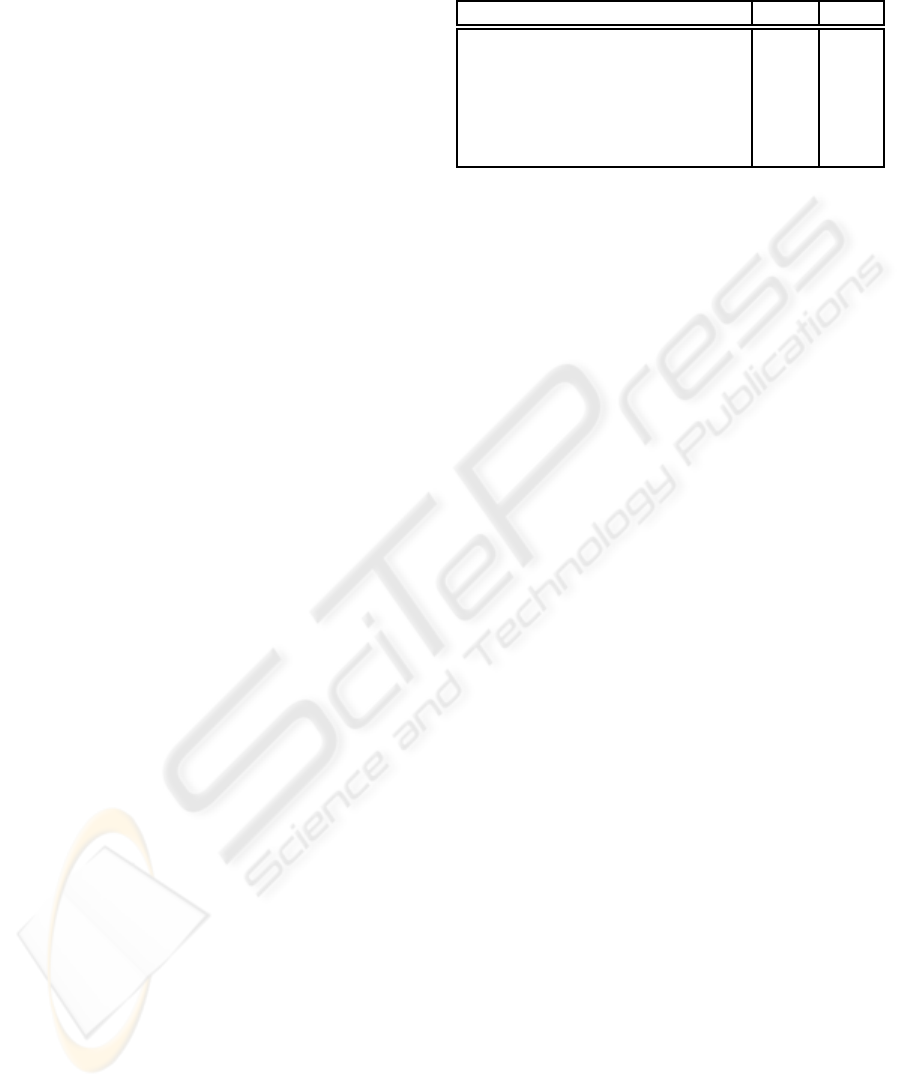
4.2 Results of Heuristic Planning
The results of the heuristic planning step can be seen
in Figure 1 (raw fitness) and Figure 2 (end fitness).
Neither old nor the new heuristics yielded schedules
that adhered to all budgets for the given scenarios.
This is also evident from the fitness values. Only SB
achieved a better raw fitness than SDD, and only in
one of the two scenarios. However, the results of LS
and GRASP were also acceptable. TS did not perform
well, which had not been expected, because it had
performed much better for smaller scenarios. After
applying the penalty function, all of the new heuris-
tics dropped to a fitness of below 1%, whereas SDD
maintained a fitness of roughly 10%. The reason why
TS yields such bad results may be the representation
and the method for creating new children from a solu-
tion. A great part of it is changing selection rules ran-
domly, which favors smaller scenarios. In scenarios
with many grid jobs it is more likely that the exchange
of a certain percentage of rules will result in a child
that is inferior to the parent. Moreover, TS internally
works with a simpler evaluation as described before
and the comparison of the results is based on the more
comprehensive GLEAM evaluation. GRASP experi-
ences similar problems. However, it does not depend
on a single initial solution, but rather creates random-
ized ones in each iteration. This is beneficial, because
new solutions do not inherit bad parts from a parent.
AN ASSESSMENT OF HEURISTICS FOR FAST SCHEDULING OF GRID JOBS
189
0
5
10
15
20
25
30
35
40
SDD
LS
SB
TS
GRASP
fitness in %
sl300
ll300
Figure 1: Raw fitness after the heuristic planning step.
The 95% confidence intervals are shown for the stochastic
heuristics.
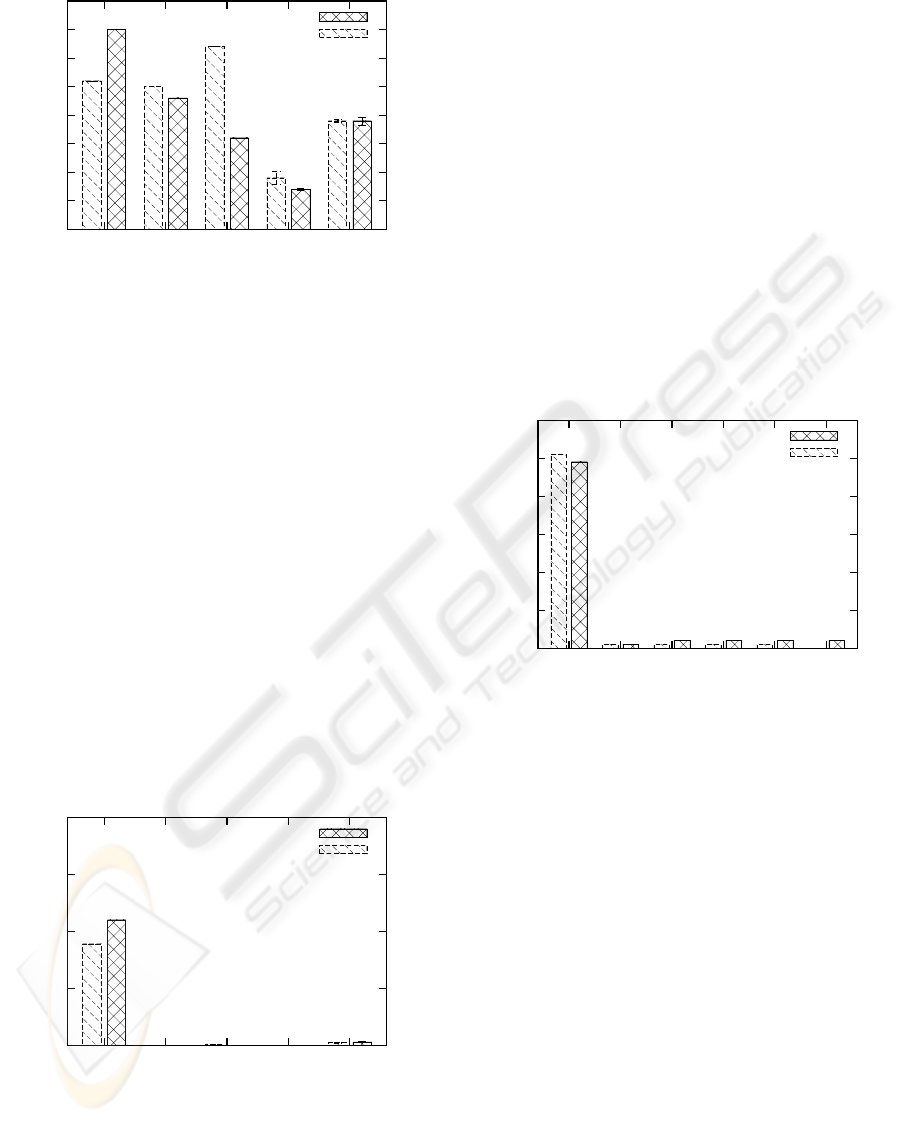
4.3 Results of GLEAM Runs
As GLEAM works stochastically, 100 runs were done
for each setting. The start populations are either plain
randomly seeded or a mixture of random seeds and
results from each heuristic. Start populations us-
ing heuristic outcomes must be completed by ran-
domly generated (poor) solutions, because there are
not enough results and, more important, there must
be a great variety to start with for the evolutionary
search. More or less homogeneous (start) populations
are the death of evolution. The comparisons are based
on the success rate and the averaged fitness in con-
junction with 95% confidence intervals. The success
rate of GLEAM optimization is measured by the per-
centage of penalty-free runs. A penalty-free run is a
run, where all application jobs have been scheduled
to meet their budget constraints.
0
5
10
15
20
SDD
LS
SB
TS
GRASP
fitness in %
sl300
ll300
Figure 2: End fitness after the heuristic planning step.
Population sizes from 120 to 300 have been tried
out, because the population size yielding the best
quality may differ for each scenario and heuristic used
for seeding.
The results are shown in Figure 3. If the initial
population was created with SDD, GLEAM achieved
a success rate of about 50% in either scenario within
the given time frame of three minutes. With both
the new heuristics and random initialization, GLEAM
only achieved a success rate between 0% and 2%.
Consequently, there was no improvement. A success-
ful run can be spoiled by exceeding cost or time lim-
its. For scenario ll300, the reason of unsuccessful runs
mainly was a violation of the time limit for all tested
heuristics. Only up to 10% of the runs were spoiled
by exceeding cost limits. For scenario sl300, the num-
ber of cost and time limit violations was about equal.
Even though violations could not always be removed
completely, the schedules produced by the heuristic
planning step were improved by GLEAM in all cases
by reducing the amount of violations and improving
raw fitness.
0
10
20
30
40
50
60
SDD
LS
SB
TS
GRASP
RAND
success rate in %
sl300
ll300
Figure 3: Success rate of the GLEAM optimization.
5 CONCLUSIONS
Although SDD is a very simple heuristic, it yields the
best results of all heuristics tested for the given bench-
marks. This confirms previous investigations, where
similar results were found. The fact that SDD beats all
heuristics tested so far underlines its ability to solve
the given problem well. Although it is not perfect, the
results are by far the best ones obtained during all our
investigations.
It must also be noted that the current version of
GLEAM performs better with a good heuristic seed-
ing of the initial population than with pure random
initialization. Obviously, the raw fitness from heuris-
tic planning is not at all related to the success of
GLEAM, the end fitness turns out to be the decisive
factor. For scenarios of the given size (amount of jobs
and resources) it is essential for the initial population
to be as penalty-free as possible, which currently is
ICSOFT 2010 - 5th International Conference on Software and Data Technologies
190

achieved best by SDD. GLEAM cannot compensate
flaws in the initial population within the runtime of
three minutes only.
The unexpected poor results of the new heuris-
tics are a motivation for us to change our focus to the
identification of suited local searchers that can assist
GLEAM. They are intended to improve the offspring
of a mating of the Evolutionary Algorithm. This con-
cept of hybridization was applied successfully to op-
timization tasks from the continuous parameter do-
main, as reported by (Jakob, 2006).
REFERENCES
Adams, J., Balas, E., and Zawack, D. (1988). The shifting
bottleneck procedure for job shop scheduling. MAN-
AGEMENT SCIENCE, 34(3).
Baykaso˘glu, A.,
¨
Ozbakır, L., and Dereli, T. (2002). Multi-
ple dispatching rule based heuristic for multi-objective
scheduling of job shops using tabu search. In Pro-
ceedings of MIM 2002: 5th Int. Conf. on Managing
Innovations in Manufacturing (MIM), pages 396–402,
Milwaukee, Wisconsin, USA.
Blume, C. (1991). GLEAM - a system for simulated ‘in-
tuitive learning’. In Schwefel, H.-P. and M¨anner,
R., editors, PPSN I (1990), LNCS 496, pages 48–54.
Springer.
Blume, C. and Jakob, W. (2002). GLEAM - an evolutionary
algorithm for planning and control based on evolution
strategy. In Cant´u-Paz, E., editor, GECCO 2002, vol-
ume LBP, pages 31–38.
Blume, C. and Jakob, W. (2009). GLEAM - General Learn-
ing Evolutionary Algorithm and Method : ein Evo-
lutionrer Algorithmus und seine Anwendungen, vol-
ume 32 of Schriftenreihe des AIA. (in German), KIT
Scientific Publishing, Karlsruhe.
Brucker, P. (2004). Scheduling Algorithms. Springer, Berlin
Heidelberg.
Brucker, P. (2006). Complex Scheduling. Springer, Berlin
Heidelberg.
Chen, K.-P., Lee, M. S., Pulat, P. S., and Moses, S. A.
(2006). The shifting bottleneck procedure for job-
shops with parallel machines. Int. Journal of Indus-
trial and Systems Engineering 2006, 1(1/2):244–262.
Dauz`ere-P´er`es, S. and Lasserre, J. B. (1993). A modified
shifting bottleneck procedure for job-shop scheduling.
Int. Journal of Prod. Research, 31(4):923–932.
Giffler, B. and Thompson, G. L. (1960). Algorithms for
solving production scheduling problems. Operations
Research, 8:487–503.
Jakob, W. (2006). Towards an adaptive multimeme al-
gorithm for parameter optimisation suiting the engi-
neers’ need. In Runarsson, T. P., Beyer, H.-G., and
Merelo-Guervos, J. J., editors, PPSN IX, LNCS 4193,
pages 132–141, Berlin. Springer.
Jakob, W., Quinte, A., Stucky, K.-U., and S¨uß, W. (2008).
Fast multi-objective scheduling of jobs to constrained
resources using a hybrid evolutionary algorithm. In
Rudolph, G., Jansen, T., Lucas, S. M., Poloni, C.,
and Beume, N., editors, PPSN X, LNCS 5199, pages
1031–1040. Springer.
Jakob, W., Quinte, A., S¨uß, W., and Stucky, K.-U. (2009).
Fast multi-objective rescheduling of grid jobs by
heuristics and evolution. In Conf. Proc. PPAM 2009
(to be published in LNCS), Berlin. Springer.
M¨oser, F. (2009). Integration von Optimierungsalgorithmen
in den Grid Resource Broker GORBA. (in German)
Bachelor Thesis, DHBW Karlsruhe, Karlsruhe Insti-
tute of Technology.
Neumann, K. and Morlock, M. (2002). Operations Re-
search. Carl Hanser, M¨unchen.
Pitsoulis, L. S. and Resende, M. G. C. (2001). Greedy
randomized adaptive search procedures. In Pardalos,
P. M. and Resende, M. G. C., editors, Handbook of
Applied Optimization, pages 168–181. Oxford Uni-
versity Press.
Schuster, C. J. (2003). No-wait Job-Shop Scheduling: Kom-
plexit¨at und Local Search. PhD thesis, Universit¨at
Duisburg-Essen, Duisburg.
Set¨amaa-K¨arkk¨ainen, A., Miettinen, K., and Vuori, J.
(2006). Best compromise solution for a new multiob-
jective scheduling problem. Computers & Computers
and Operations Research archive, 33(8):2353–2368.
Sonnleithner, D. (2008). Integration eines Giffler-
Thompson-Schedulers in GORBA. (in German), re-
search paper, Faculty of Mechanical Engineering,
University of Karlsruhe.
S¨uß, W., Quinte, A., Jakob, W., and Stucky, K.-U. (2007).
Construction of benchmarks for comparison of grid
resource planning algorithms. In Filipe, J., Shishkov,
B., and Helfert, M., editors, ICSOFT 2007, Proc. of
the Second ICSOFT, Volume PL/DPS/KE/WsMUSE,
Barcelona, Spain, July 22-25, 2007, pages 80–87.
Inst. f. Systems and Techn. of Inf., Control and Com.,
INSTICC Press.
AN ASSESSMENT OF HEURISTICS FOR FAST SCHEDULING OF GRID JOBS
191
