
MODELING RADIAL VELOCITY SIGNALS FOR EXOPLANET
SEARCH APPLICATIONS
Prabhu Babu
∗
, Petre Stoica
Division of Systems and Control, Department of Information Technology
Uppsala University, P.O. Box 337, SE-75 105, Uppsala, Sweden
Jian Li
Department of Electrical and Computer Engineering, University of Florida, Gainesville, 32611, FL, U.S.A.
Keywords:
Radial velocity method, Exoplanet search, Kepler model, IAA, Periodogram, RELAX, GLRT.
Abstract:
In this paper, we introduce an estimation technique for analyzing radial velocity data commonly encountered in
extrasolar planet detection. We discuss the Keplerian model for radial velocity data measurements and estimate
the 3D spectrum (power vs. eccentricity, orbital period and periastron passage time) of the radial velocity data
by using a relaxation maximum likelihood algorithm (RELAX). We then establish the significance of the
spectral peaks by using a generalized likelihood ratio test (GLRT). Numerical experiments are carried out on
a real life data set to evaluate the performance of our method.
1 INTRODUCTION
Extrasolar planet (or shortly exoplanet) detection is
a fascinating and challenging area of research in the
field of astrophysics. Till mid 2009, 353 exoplanets
have been discovered. Some of the techniques avail-
able in the astrophysics literature to detect exoplanets
are astrometry, the radial velocity method, pulsar tim-
ing, the transit method and gravitational microlens-
ing. Among these methods, the radial velocity analy-
sis is the most commonly used technique, in which the
Doppler shift in the spectral lines and hence the radial
velocity of the parent star is measured. The spectrum
of the measured Doppler shifts is then analyzed to de-
tect the exoplanet(s) revolving around the star.
Most often the radial velocity measurements are ob-
tained at nonuniformly spaced time intervals due to
hardware and practical constraints, which limits the
application of commonly used spectral analysis meth-
ods. The most straightforward way to deal with this
problem is to use the standard periodogram by ignor-
ing the nonuniformity of data samples, which results
in an inaccurate spectrum. In (Roberts et al., 1987), a
method named CLEAN was proposed, which is based
∗
Corresponding author. This work was supported in part
by the Swedish Research Council (VR).
on iterative deconvolution in the frequency domain to
obtain a clean spectrum from an initial dirty one. A
periodogram related method is the least squares peri-
odogram (also called the Lomb-Scargle periodogram)
(Lomb, 1976; Scargle, 1982) which estimates the si-
nusoidal components by fitting them to the observed
data. Most recently, (Yardibi et al., 2010; Stoica et al.,
2009) introduced a new method called the Iterative
Adaptive Approach (IAA), which relies on solving an
iterative weighted least squares problem.
In this paper, we analyze the radial velocity data
by using a relaxation maximum likelihood algorithm
(RELAX) initialized with IAA estimates. The signif-
icance of the spectral peaks is then established via a
generalized likelihood ratio test (GLRT). Numerical
experiments are carried out on a real life radial veloc-
ity data set.
In Section 2, we describe the model used in this pa-
per for the radial velocity data. Section 3 presents the
RELAX and GLRT methods, and Section 4 contains
the results for a real life example. Finally, the paper
is concluded in Section 5.
155
Babu P., Stoica P. and Li J. (2010).
MODELING RADIAL VELOCITY SIGNALS FOR EXOPLANET SEARCH APPLICATIONS.
In Proceedings of the 7th International Conference on Informatics in Control, Automation and Robotics, pages 155-159
DOI: 10.5220/0002770601550159
Copyright
c
SciTePress

2 DATA MODEL
Let {y(t
n
)}
N
n=1
denote the radial velocity of a star
measured at a set of possibly nonuniform time in-
stants {t
n
}
N
n=1
. Based on the Keplerian model of plan-
etary motion (Zechmeister and Kurster, 2009) (Cum-
ming, 2004), the radial velocity data are modeled as
follows:
y(t
n
) = C
0
+
M
∑
m=1
β
m
[cos(ω
m
+ ν
m
(t
n
)) + e
m
cos(ω
m
)],
n = 1, ··· , N
(1)
where C
0
is the constant radial velocity, and
tan(ν
m
(t
n
)) =
q
1+e
m
1−e
m
tan(E
m
(t
n
))
E
m
(t
n
) − e
m
sin(E
m
(t
n
)) =
2π(t
n
−T
m
)
P
m
,
(2)
M: Number of exoplanets revolving around the
star. The number of planets M is usually unknown.
e
m
: Eccentricity of the orbit of the m
th
planet.
ω
m
: Longitude of the periastron for the m
th
planet.
P
m
: Orbital period of the m
th
planet; P
m
is related
to orbital frequency f
m
by f
m
=
1
P
m
.
T
m
: Periastron passage time of the m
th
planet.
β
m
: Radial velocity amplitude of the m
th
planet.
ν
m
(t
n
), E
m
(t
n
): True and eccentric anomaly of the
m
th
planet, with t
n
denoting their time dependence.
We divide the entire 2D space G , defined as G =
{(e, f), 0 ≤ e < e
max
, −
f
max
2
< f <
f
max
2
}, into a grid
of prespecified size K. We point out here that the grid
G does not include the parameter T, and that T is
taken to be zero for the time being but will be esti-
mated as described later on. The choices of e
max
and
f
max
in G depend on the sampling pattern: to deter-
mine them, we calculate the spectral window defined
as:
W(e, f) =
1
N
N
∑
n=1
exp( jν(t
n
))
2
, 0 ≤ e < 1, −∞ ≤ f ≤ ∞.
(3)
For any choice of (e, f) and t
n
, there exists a ν(t
n
) ob-
tained via (2). Following (Eyer and Bartholdi, 1999),
the parameters e
max
and f
max
are chosen such that the
region G leads to an unambiguousW(e, f) (see (Babu
et al., 2010) for more details).
3 PARAMETER ESTIMATION
AND STATISTICAL
SIGNIFICANCE TESTING:
RELAX AND GLRT
The estimates obtained from IAA are usually fairly
accurate. However, if the grid (G ) is not chosen fine
enough (to reduce the computation time), then IAA
might miss some true peaks (see (Babu et al., 2010)
for an elaborate discussion on IAA for radial veloc-
ity data). In that case, applying RELAX (Li and
Stoica, 1996), a parametric iterative estimation al-
gorithm, can refine the IAA estimates. Algorithm 1
briefly describes the steps involved in RELAX. The
P largest peaks picked from IAA are used as initial
estimates for RELAX, which has a beneficial effect
on the convergence of RELAX compared with using
other more arbitrary initial estimates. In the case of
radial velocity data, the choice of P = 5 peaks ap-
pears to be reasonable for most applications. RELAX
generally converges within a few iterations (typically
in less than 10 iterations).
Next we note that, under the assumption the noise
in the data is Gaussian distributed, the RELAX esti-
mates are optimal in the maximum likelihood sense
(Li and Stoica, 1996). We can then use the general-
ized likelihood ratio test (GLRT) to establish the sta-
tistical significance of the estimated planet parame-
ters. We first apply RELAX to the largest IAA peak
and use GLRT to test the null hypothesis that there are
no planets (or, in other words, that the data is made
only of white noise) against the hypothesis that there
is at least one exoplanet. If the test rejects the null
hypothesis then we will proceed and apply RELAX
to the two largest peaks and subsequently test the hy-
pothesis that there is one exoplanet in the data against
the hypothesis that there are at least two exoplanets;
and so on. As an example, for the following hypothe-
ses
H
0
: There are no planets.
H
1
: There is at least one exoplanet with eccentricity
ˆe
1
, orbital frequency
ˆ
f
1
and periastron passage time
ˆ
T
1
.
the log-likelihood (LL) functions are given by:
LL(H
0
) =
−
N
2
ln
N
∑
n=1
|y(t
n
)|
2
+C,
LL(H
1
) =
−
N
2
ln
N
∑
n=1
|y(t
n
) − ˆr
1
cos(ν(t
n
)) − ˆq
1
sin(ν(t
n
))|
2
+C
(4)
where C is an additive constant, ν(t
n
) is calculated
from the RELAX estimates (ˆe
1
,
ˆ
f
1
,
ˆ
T
1
), and ˆr
1
, ˆq
1
are the least square estimates of r, q corresponding to
(ˆe
1
,
ˆ
f
1
,
ˆ
T
1
), see Algorithm 1. Under the assumption
that hypothesis H
0
is true, the log-likelihood-ratio,
defined as 2(LL(H
1
) − LL(H
0
)), is asymptotically a
random variable with a chi-square distribution. Then
the GLRT is given by
2(LL(H
1
) − LL(H
0
))
H
1
≷
H
0
Λ
(5)
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
156

where Λ denotes a fixed threshold. The threshold is
usually chosen such that prob(X ≤ Λ) = ξ, where X ∼
χ
2
5
denotes a chi-square distributed random variable
with 5 degrees of freedom (because of the 5 unknowns
per planet in the data model, namely e, f, T, r and
q), and ξ determines the significance level of the test.
Choosing ξ = 0.99 gives a false alarm probability of
0.01 and the corresponding threshold is Λ = 15.
4 A REAL LIFE EXAMPLE:
HD 208487
In this section, we consider the application of the al-
gorithm introduced in the previous section to a real
life radial velocity data set. Our goal is to detect
the exoplanets present in a star system and estimate
their eccentricities, frequencies and periastron pas-
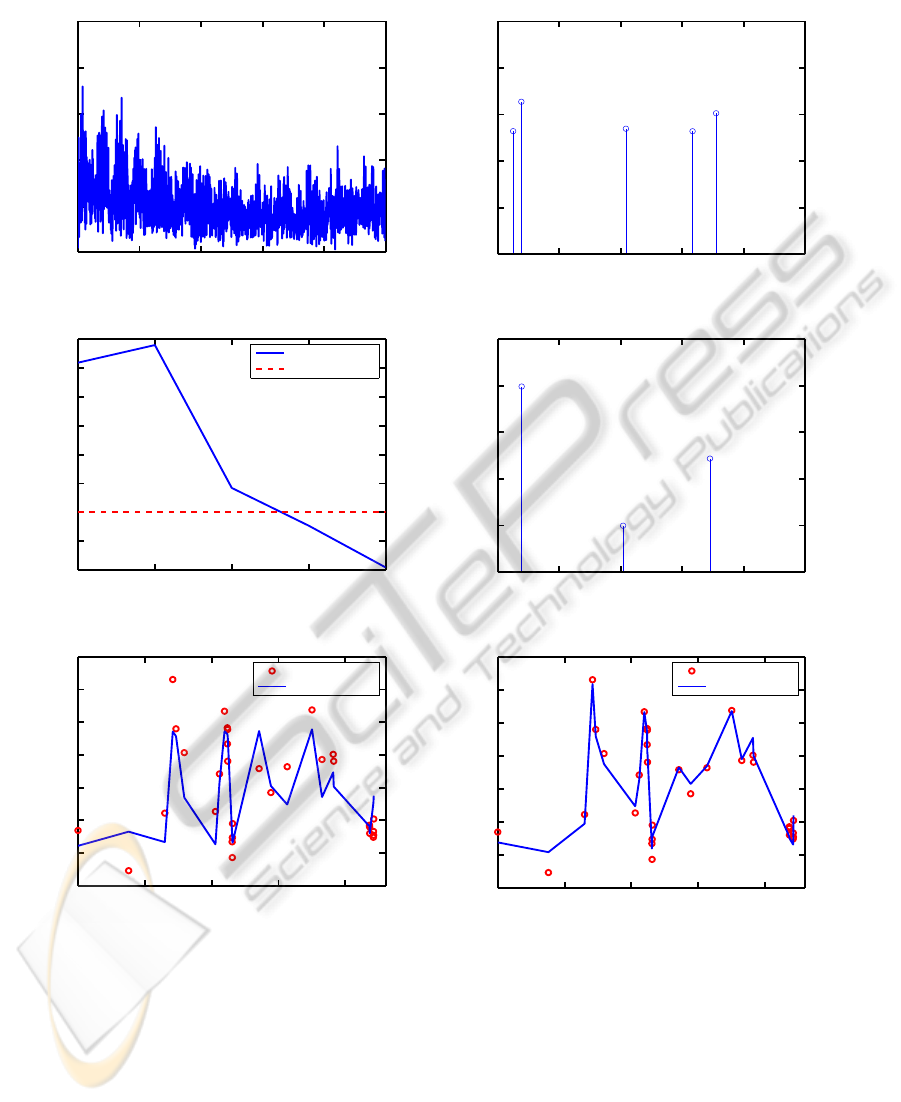
sage times. We will show the following plots:
• Amplitude vs. orbital frequency for IAA and
RELAX (eccentricity and periastron passage time
values for the peaks in the amplitude spectrum are
indicated in the plots).
• Likelihood ratio vs. the planet number.
• Observed and fitted data sequences.
The data set used here consists of 31 samples of
radial velocity measurements of the star HD 208487.
The parameters e
max
and f
max
are determined from
the spectral window to be 0.5 and 1 cycles/day. The
spectrum obtained using IAA is shown in Fig.1(a),
which indicates the presence of more than one planet.
The 5 largest peaks in the IAA spectrum are picked
up and are used to initialize RELAX. The GLRT
plot shown in Fig.1(c) suggests the existence of three
planets in the HD 208487 star system with the fol-
lowing parameters (see Fig.1(d) and also Table 1):
(e
1
= 0.326, f
1
= 0.0078 cycles/day, T
1
= 130.9
days), (e
2
= 0.315, f
2
= 0.069 cycles/day, T
2
= 14.2
days) and (e
3
= 0, f
3
= 0.0408 cycles/day, T
3
= 2.9
days). However (Tinney et al., 2005) reported that the
star has only one planet with an orbital frequency of
0.0077 cycles/day. Fig. 1(e) and 1(f) showthe plots of
measured data and the fitted data obtained assuming
the existence of one and, respectively, three planets. It
is seen clearly from these figures that the three planet
model fits the measured data much better than a single
planet model.
5 CONCLUSIONS
The real life example discussed in the paper suggests
that our algorithm successfully detects the presence
of spectral peaks (planets) in radial velocity data and
accurately identifies both their frequencies and eccen-
tricities as well as their periastron passage times. The
example used here is typical of cases usually encoun-
tered in exoplanet search and hence the proposed al-
gorithm is believed to be an effective and useful tool.
REFERENCES
Babu, P., Stoica, P., Li, J., Chen, Z., and Ge, J. (2010).
Analysis of radial velocity data by a novel adaptive
approach. The Astronomical Journal, 139:783–793.
Cumming, A. (2004). Detectability of extrasolar planets in
radial velocity surveys. Monthly Notices of the Royal
Astronomical Society, 354(4):1165–1176.
Eyer, L. and Bartholdi, P. (1999). Variable stars: Which
Nyquist frequency? Astronomy and Astrophysics,
Supplement Series, 135:1–3.
Li, J. and Stoica, P. (1996). Efficient mixed-spectrum es-
timation with applications to target feature extraction.
IEEE Transactions on Signal Processing, 44(2):281–
295.
Lomb, N. R. (1976). Least-squares frequency analysis of
unequally spaced data. Astrophysics and Space Sci-
ence, 39(1):10–33.
Roberts, D. H., Lehar, J., and Dreher, J. W. (1987). Time
series analysis with CLEAN. I. Derivation of a spec-
trum. The Astronomical Journal, 93(4):968–989.
Scargle, J. D. (1982). Studies in astronomical time se-
ries analysis. II. Statistical aspects of spectral analy-
sis of unevenly spaced data. Astrophysical Journal,
263:835–853.
Stoica, P., Li, J., and He, H. (2009). Spectral analysis of
nonuniformly sampled data: A new approach versus
the periodogram. IEEE Transactions on Signal Pro-
cessing, 57(3):843–858.
Stoica, P. and Moses, R. (2005). Spectral Analysis of Sig-
nals. Prentice Hall, Upper Saddle River, N.J.
Tinney, C., Butler, R., Marcy, G., Jones, H., Penny, A., Mc-
Carthy, C., Carter, B., and Fischer, D. (2005). Three
Low-Mass Planets from the Anglo-Australian Planet
Search 1. The Astrophysical Journal, 623(2):1171–
1179.
Yardibi, T., Li, J., Stoica, P., Xue, M., and Baggeroer, A. B.
(2010). Iterative adaptive approach for sparse sig-
nal representation with sensing applications. IEEE
Transactions on Aerospace and Electronic Systems,
46:425–443.
Zechmeister, M. and Kurster, M. (2009). The generalised
Lomb-Scargle periodogram. Astronomy and Astro-
physics, 496(2):577–584.
MODELING RADIAL VELOCITY SIGNALS FOR EXOPLANET SEARCH APPLICATIONS
157
APENDIX
0 0.1 0.2 0.3 0.4 0.5
5
10
15
20
25
Orbital frequency (cycles/day)
Amplitude
0 0.02 0.04 0.06 0.08 0.1
0
5
10
15
20
25
Orbital frequency (cycles/day)
Amplitude
(0, 83.4)
(0, 102)
(0, 2.1)
(0.44, 15.4)
(0.2, 13.8)
(a) (b)
1 2 3 4 5
5
10
15
20
25
30
35
40
45
Number of peaks
Likelihood ratio
Likelihood ratio
Threshold
0 0.02 0.04 0.06 0.08 0.1
0
5
10
15
20
25
Orbital frequency (cycles/day)
Amplitude
(0.326, 130.9)
(0, 2.9)
(0.315, 14.2)
(c) (d)
0 500 1000 1500 2000
−30
−20
−10
0
10
20
30
40
Time (days)
Amplitude
Observed data
Fitted data
0 500 1000 1500 2000
−30
−20
−10
0
10
20
30
40
Time (days)
Amplitude
Observed data
Fitted data
(e) (f)
Figure 1: HD 208487: (a) the IAA spectrum, (b) the 5 largest peaks in the IAA spectrum, (c) the likelihood ratio, (d) the
RELAX spectrum, (e) comparison of the observed data and fitted data obtained from the parameters of the planet reported in
(Tinney et al., 2005) and (f) comparison of the observed data and fitted data obtained from the three detected planets.
ICINCO 2010 - 7th International Conference on Informatics in Control, Automation and Robotics
158
Table 1: Parameters of the planets of HD 208487 star system.
∗)
The third planet becomes statistically insignificant if the false
alarm probability is decreased from 10
−2
to 10
−4
, in which case the threshold becomes Λ = 25.
Planet No. Previous work This work
e f(cycles/day) T(days) β e f(cycles/day) T(days) β
1 0.24 0.0077 92 20 0.3260 0.0078 130.9 19.9
2 - - - - 0.3150 0.0690 14.2 12.18
3
∗)
- - - - 0 0.0408 2.9 4.96
Algorithm 1: RELAX.
Let {(e
0
p
, f
0
p
, T
0
p
)}
P
p=1
denote the parameters of the P most dominant planets in the IAA spectrum (e.g. P = 5).
The initial values of their radial velocity amplitudes {(r
0
p
, q
0
p
)}
P
p=1
are taken to be zero.
for p = 1 to P do
for i = 1 to I (e.g. I = 10) do
for u = 1 to p do
y
i
u
(t
n
) = y(t
n
)−
p
∑
k=1,k6=u
r
i−1
k
cos(ν
i−1
k
(t
n
)) + q
i−1
k
sin(ν
i−1
k
(t
n
))
where ν
i−1
k
is obtained from
(e
i−1
k
, f
i−1
k
, T
i−1
k
). Then
(e
i
u
, f
i
u
, T
i
u
)
= argmin
{e, f ,T}
min
{r,q}
N
∑
n=1
y
i
u
(t
n
) −r cos(ν(t
n
)) − qsin(ν(t
n
))
2
The inner minimization with respect to {r, q} in the above equation is a least squares problem and the
estimates {r
i
u
, q
i
u
} can be obtained analytically (see (Stoica and Moses, 2005)). The minimization with
respect to {e, f, T} is carried out via a 3D grid search performed around (e
i−1
u
, f
i−1
u
, T
i−1
u
).
end for
end for
for u = 1 to p do
(e
0
u
, f
0
u
, T
0
u
) ← (e
I
u
, f
I
u
, T
I
u
) and (r
0
u
, q
0
u
) ← (r
I
u
, q
I
u
).
end for
end for
{( ˆe
p
,
ˆ
f
p
,
ˆ
T
p
) ← (e
I
p
, f
I
p
, T
I
p
)}
P
p=1
and {(ˆr
p
, ˆq
p
) ← (r
I
p
, q
I
p
)}
P
p=1
MODELING RADIAL VELOCITY SIGNALS FOR EXOPLANET SEARCH APPLICATIONS
159
